




2025
Jamšek, Marko; Oklobdžija, Lara Tušek; Vrabič, Rok; Babič, Jan
Implementation of Impedance Control for the EduExo Pro Exoskeleton Book Chapter
In: pp. 253-257, 2025.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inbook{Jamek2025,
title = {Implementation of Impedance Control for the EduExo Pro Exoskeleton},
author = {Marko Jam\v{s}ek and Lara Tu\v{s}ek Oklobd\v{z}ija and Rok Vrabi\v{c} and Jan Babi\v{c}},
doi = {10.1007/978-3-031-77588-8_50},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
pages = {253-257},
abstract = {This paper describes improvements to the EduExo Pro exoskeleton, emphasizing the introduction of impedance control with a Dynamixel servo motor and a Raspberry Pi. This upgrade enhances the system’s ability to support the development of advanced control algorithms, increasing its usefulness for educational purposes. Initial findings indicate a need for friction compensation due to the high gear reduction in the new motor setup. Nevertheless, the upgrades not only
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inbook}
}
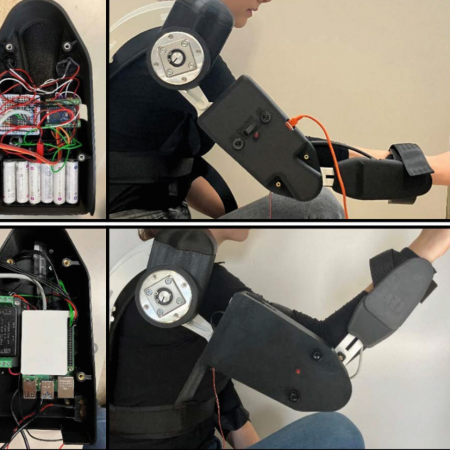
This paper describes improvements to the EduExo Pro exoskeleton, emphasizing the introduction of impedance control with a Dynamixel servo motor and a Raspberry Pi. This upgrade enhances the system’s ability to support the development of advanced control algorithms, increasing its usefulness for educational purposes. Initial findings indicate a need for friction compensation due to the high gear reduction in the new motor setup. Nevertheless, the upgrades not only
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.
2024

Jamšek, Marko; Sajko, Gal; Krpan, Jurij; Babič, Jan
Design and Control of a Climbing Robot for Autonomous Vertical Gardening Journal Article
In: Machines, vol. 12, iss. 2, pp. 141, 2024, ISSN: 2075-1702.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Robot Design | Links:
@article{nokey,
title = {Design and Control of a Climbing Robot for Autonomous Vertical Gardening},
author = {Marko Jam\v{s}ek and Gal Sajko and Jurij Krpan and Jan Babi\v{c}},
doi = {10.3390/machines12020141},
issn = {2075-1702},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Machines},
volume = {12},
issue = {2},
pages = {141},
abstract = {This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.},
keywords = {Compliance and Impedance Control, Kinematics, Robot Design},
pubstate = {published},
tppubtype = {article}
}
This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.
2023
Khoramshahi, Mahdi; Poignant, Alexis; Morel, Guillaume; Jarrassé, Nathanael
A Practical Control Approach for Safe Collaborative Supernumerary Robotic Arms Proceedings Article
In: 2023 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), pp. 147-152, 2023, ISSN: 2162-7576.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@inproceedings{10187452,
title = {A Practical Control Approach for Safe Collaborative Supernumerary Robotic Arms},
author = {Mahdi Khoramshahi and Alexis Poignant and Guillaume Morel and Nathanael Jarrass\'{e}},
doi = {10.1109/ARSO56563.2023.10187452},
issn = {2162-7576},
year = {2023},
date = {2023-06-01},
urldate = {2023-06-01},
booktitle = {2023 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO)},
pages = {147-152},
abstract = {Supernumerary robotic arms have a high potential to increase human capacities to perform complicated tasks; e.g., having a third arm could increase the user\'s strength, precision, reachability, and versatility. However, having a robotic manipulator working in extreme proximity to the user raises new challenges in terms of safety; i.e., uncontrolled and hazardous collisions with the user\'s body parts and the environment. In this preliminary work, we show that most of these safety considerations can be extracted from standardized norms and translated into kinematics constraints for the robot. Thus, we propose a quadratic programming approach to achieve safe inverse-kinematics and physical interaction for supernumerary arms. We validate our approach in designing a safe supernumerary arm using the 7-Dof Kinova® Gen3 robot.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
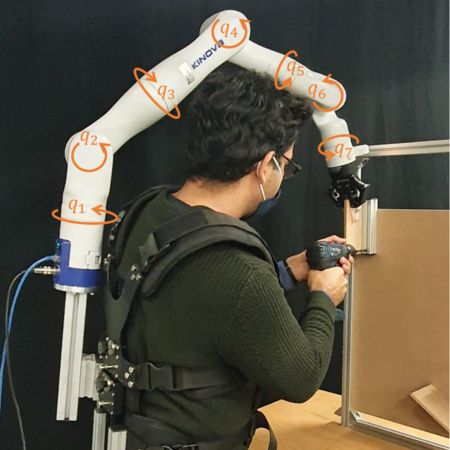
Supernumerary robotic arms have a high potential to increase human capacities to perform complicated tasks; e.g., having a third arm could increase the user's strength, precision, reachability, and versatility. However, having a robotic manipulator working in extreme proximity to the user raises new challenges in terms of safety; i.e., uncontrolled and hazardous collisions with the user's body parts and the environment. In this preliminary work, we show that most of these safety considerations can be extracted from standardized norms and translated into kinematics constraints for the robot. Thus, we propose a quadratic programming approach to achieve safe inverse-kinematics and physical interaction for supernumerary arms. We validate our approach in designing a safe supernumerary arm using the 7-Dof Kinova® Gen3 robot.
Escarabajal, Rafael J.; París, Elena; Petrič, Tadej; Valera, Ángel; Mata, Vicente; Babič, Jan
Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes Proceedings Article
In: 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1-8, IEEE, 2023, ISBN: 979-8-3503-2570-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics | Links:
@inproceedings{Escarabajal2023,
title = {Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes},
author = {Rafael J. Escarabajal and Elena Par\'{i}s and Tadej Petri\v{c} and \'{A}ngel Valera and Vicente Mata and Jan Babi\v{c}},
doi = {10.1109/ROBIO58561.2023.10354618},
isbn = {979-8-3503-2570-6},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
pages = {1-8},
publisher = {IEEE},
abstract = {This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {inproceedings}
}
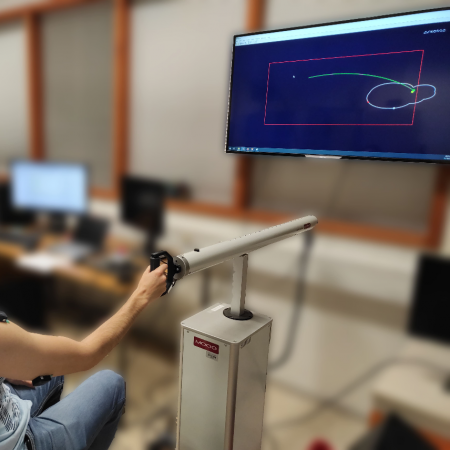
This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.
2022
Takahashi, Chie; Azad, Morteza; Rajasekaran, Vijaykumar; Babič, Jan; Mistry, Michael
Human Stiffness Perception and Learning in Interacting With Compliant Environments Journal Article
In: Frontiers in Neuroscience, vol. 16, no. June, pp. 1–13, 2022, ISSN: 1662-453X.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Takahashi2022,
title = {Human Stiffness Perception and Learning in Interacting With Compliant Environments},
author = {Chie Takahashi and Morteza Azad and Vijaykumar Rajasekaran and Jan Babi\v{c} and Michael Mistry},
url = {https://www.frontiersin.org/articles/10.3389/fnins.2022.841901/full},
doi = {10.3389/fnins.2022.841901},
issn = {1662-453X},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
journal = {Frontiers in Neuroscience},
volume = {16},
number = {June},
pages = {1--13},
abstract = {Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.},
keywords = {Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.
2020
Ugurlu, Barkan; Oshima, Hironori; Sariyildiz, Emre; Narikiyo, Tatsuo; Babič, Jan
Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 50, no. 2, pp. 144–153, 2020, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance | Links:
@article{Ugurlu2020,
title = {Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking},
author = {Barkan Ugurlu and Hironori Oshima and Emre Sariyildiz and Tatsuo Narikiyo and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8960446/},
doi = {10.1109/THMS.2019.2961969},
issn = {2168-2291},
year = {2020},
date = {2020-04-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {50},
number = {2},
pages = {144--153},
abstract = {This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.
2019
Petrič, Tadej; Peternel, Luka; Morimoto, Jun; Babič, Jan
Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability Journal Article
In: Frontiers in Neurorobotics, vol. 13, pp. 30, 2019, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Performance Augmentation, Optimal Control | Links:
@article{Petric2019,
title = {Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability},
author = {Tadej Petri\v{c} and Luka Peternel and Jun Morimoto and Jan Babi\v{c}},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2019.00030/full https://www.frontiersin.org/articles/10.3389/fnbot.2019.00030/full?\&utm_source=Email_to_authors_\&utm_medium=Email\&utm_content=T1_11.5e1_author\&utm_campaign=Email_publication\&field=\&journalName=Frontiers_in_Neurorobotics\&id=451266},
doi = {10.3389/fnbot.2019.00030},
issn = {1662-5218},
year = {2019},
date = {2019-05-01},
journal = {Frontiers in Neurorobotics},
volume = {13},
pages = {30},
publisher = {Frontiers},
abstract = {This paper introduces a novel control framework for an arm exoskeleton that takes into account force of the human arm. In contrast to the conventional exoskeleton controllers where the assistance is provided without considering the human arm biomechanical force manipulability properties, we propose a control approach based on the arm muscular manipulability. The proposed control framework essentially reshapes the anisotropic force manipulability into the endpoint force manipulability that is invariant with respect to the direction in the entire workspace of the arm. This allows users of the exoskeleton to perform tasks effectively in the whole range of the workspace, even in areas that are normally unsuitable due to the low force manipulability of the human arm. We evaluated the proposed control framework with real robot experiments where subjects wearing an arm exoskeleton were asked to move a weight between several locations. The results show that the proposed control framework does not affect the normal movement behavior of the users while effectively reduces user effort in the area of low manipulability.Particularly, the proposed approach augments the human arm force manipulability to execute tasks equally well in the entire workspace of the arm.},
keywords = {Compliance and Impedance Control, Human Performance Augmentation, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
This paper introduces a novel control framework for an arm exoskeleton that takes into account force of the human arm. In contrast to the conventional exoskeleton controllers where the assistance is provided without considering the human arm biomechanical force manipulability properties, we propose a control approach based on the arm muscular manipulability. The proposed control framework essentially reshapes the anisotropic force manipulability into the endpoint force manipulability that is invariant with respect to the direction in the entire workspace of the arm. This allows users of the exoskeleton to perform tasks effectively in the whole range of the workspace, even in areas that are normally unsuitable due to the low force manipulability of the human arm. We evaluated the proposed control framework with real robot experiments where subjects wearing an arm exoskeleton were asked to move a weight between several locations. The results show that the proposed control framework does not affect the normal movement behavior of the users while effectively reduces user effort in the area of low manipulability.Particularly, the proposed approach augments the human arm force manipulability to execute tasks equally well in the entire workspace of the arm.
2018
Teramae, Tatsuya; Ishihara, Koji; Babič, Jan; Morimoto, Jun; Oztop, Erhan
Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots Journal Article
In: Frontiers in Neurorobotics, vol. 12, pp. 71, 2018, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Teramae2018,
title = {Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots},
author = {Tatsuya Teramae and Koji Ishihara and Jan Babi\v{c} and Jun Morimoto and Erhan Oztop},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2018.00071/full},
doi = {10.3389/fnbot.2018.00071},
issn = {1662-5218},
year = {2018},
date = {2018-11-01},
journal = {Frontiers in Neurorobotics},
volume = {12},
pages = {71},
publisher = {Frontiers},
abstract = {Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.

Romano, Francesco; Nava, Gabriele; Azad, Morteza; Camernik, Jernej; Dafarra, Stefano; Dermy, Oriane; Latella, Claudia; Lazzaroni, Maria; Lober, Ryan; Lorenzini, Marta; Pucci, Daniele; Sigaud, Olivier; Traversaro, Silvio; Babič, Jan; Ivaldi, Serena; Mistry, Michael; Padois, Vincent; Nori, Francesco
The CoDyCo Project Achievements and Beyond: Toward Human Aware Whole-Body Controllers for Physical Human Robot Interaction Journal Article
In: IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 516–523, 2018, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@article{Romano2018,
title = {The CoDyCo Project Achievements and Beyond: Toward Human Aware Whole-Body Controllers for Physical Human Robot Interaction},
author = {Francesco Romano and Gabriele Nava and Morteza Azad and Jernej Camernik and Stefano Dafarra and Oriane Dermy and Claudia Latella and Maria Lazzaroni and Ryan Lober and Marta Lorenzini and Daniele Pucci and Olivier Sigaud and Silvio Traversaro and Jan Babi\v{c} and Serena Ivaldi and Michael Mistry and Vincent Padois and Francesco Nori},
url = {http://ieeexplore.ieee.org/document/8093992/},
doi = {10.1109/LRA.2017.2768126},
issn = {2377-3766},
year = {2018},
date = {2018-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {3},
number = {1},
pages = {516--523},
abstract = {The success of robots in real-world environments is largely dependent on their ability to interact with both humans and said environment.The FP7 EU project CoDyCo focused on the latter of these two challenges by exploiting both rigid and compliant contacts dynamics in the robot control problem. Regarding the former, to properly manage interaction dynamics on the robot control side, an estimation of the human behaviors and intentions is necessary. In this letter, we present the building blocks of such a human-in-the-loop controller, and validate them in both simulation and on the iCub humanoid robot using a human\textendashrobot interaction scenario. In this scenario, a human assists the robot in standing up from being seated on a bench.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
The success of robots in real-world environments is largely dependent on their ability to interact with both humans and said environment.The FP7 EU project CoDyCo focused on the latter of these two challenges by exploiting both rigid and compliant contacts dynamics in the robot control problem. Regarding the former, to properly manage interaction dynamics on the robot control side, an estimation of the human behaviors and intentions is necessary. In this letter, we present the building blocks of such a human-in-the-loop controller, and validate them in both simulation and on the iCub humanoid robot using a human–robot interaction scenario. In this scenario, a human assists the robot in standing up from being seated on a bench.
Peternel, Luka; Petrič, Tadej; Babič, Jan
Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation Journal Article
In: Autonomous Robots, vol. 42, no. 1, pp. 1–17, 2018, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Force Control, Human-in-the-Loop Control | Links:
@article{Peternel2018,
title = {Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-017-9635-z},
doi = {10.1007/s10514-017-9635-z},
issn = {0929-5593},
year = {2018},
date = {2018-01-01},
journal = {Autonomous Robots},
volume = {42},
number = {1},
pages = {1--17},
publisher = {Springer US},
abstract = {We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.},
keywords = {Compliance and Impedance Control, Force Control, Human-in-the-Loop Control},
pubstate = {published},
tppubtype = {article}
}
We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.
2017
Padois, Vincent; Ivaldi, Serena; Babič, Jan; Mistry, Michael; Peters, Jan; Nori, Francesco
Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project Journal Article
In: Robotics and Autonomous Systems, vol. 90, pp. 97–117, 2017, ISSN: 09218890.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@article{Padois2017,
title = {Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project},
author = {Vincent Padois and Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Jan Peters and Francesco Nori},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889016304845},
doi = {10.1016/j.robot.2016.08.017},
issn = {09218890},
year = {2017},
date = {2017-01-01},
journal = {Robotics and Autonomous Systems},
volume = {90},
pages = {97--117},
abstract = {Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, forthcoming robotic research needs to investigate the principles governing whole-body motion and coordination with contact dynamics. There is a need to investigate the principles of motion and coordination of physical interaction, including the aspects related to unpredictability. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement. Last but not least, theoretical results needs to be validated in real-world scenarios with humanoid robots engaged in whole-body goal-directed tasks. Robots should be capable of exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilising assistive physical interaction from humans. The work presented in this paper presents state-of-the-art in these domains as well as some recent advances made within the framework of the CoDyCo European project.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, forthcoming robotic research needs to investigate the principles governing whole-body motion and coordination with contact dynamics. There is a need to investigate the principles of motion and coordination of physical interaction, including the aspects related to unpredictability. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement. Last but not least, theoretical results needs to be validated in real-world scenarios with humanoid robots engaged in whole-body goal-directed tasks. Robots should be capable of exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilising assistive physical interaction from humans. The work presented in this paper presents state-of-the-art in these domains as well as some recent advances made within the framework of the CoDyCo European project.
2016

Ivaldi, Serena; Babič, Jan; Mistry, Michael; Murphy, Robin
Special issue on whole-body control of contacts and dynamics for humanoid robots Journal Article
In: Autonomous Robots, vol. 40, no. 3, pp. 425–428, 2016, ISSN: 0929-5593.
BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion, Force Control | Links:
@article{Ivaldi2016,
title = {Special issue on whole-body control of contacts and dynamics for humanoid robots},
author = {Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Robin Murphy},
url = {http://link.springer.com/10.1007/s10514-016-9545-5},
doi = {10.1007/s10514-016-9545-5},
issn = {0929-5593},
year = {2016},
date = {2016-03-01},
journal = {Autonomous Robots},
volume = {40},
number = {3},
pages = {425--428},
keywords = {Compliance and Impedance Control, Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
Peternel, Luka; Oztop, Erhan; Babič, Jan
A shared control method for online human-in-the-loop robot learning based on Locally Weighted Regression Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3900–3906, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Peternel2016,
title = {A shared control method for online human-in-the-loop robot learning based on Locally Weighted Regression},
author = {Luka Peternel and Erhan Oztop and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759574/},
doi = {10.1109/IROS.2016.7759574},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-01-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {3900--3906},
publisher = {IEEE},
address = {Daejeon},
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.
Petrič, Tadej; Ude, Aleš; Ijspeert, Auke J
Autonomous Learning of Internal Dynamic Models for Reaching Tasks Book Section
In: Borangiu, Theodor (Ed.): Advances in Intelligent Systems and Computing, vol. 371, pp. 439–447, Springer, 2016, ISSN: 21945357.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Machine Learning | Links:
@incollection{Petric2016c,
title = {Autonomous Learning of Internal Dynamic Models for Reaching Tasks},
author = {Tadej Petri\v{c} and Ale\v{s} Ude and Auke J Ijspeert},
editor = {Theodor Borangiu},
url = {http://link.springer.com/10.1007/978-3-319-21290-6_44},
doi = {10.1007/978-3-319-21290-6_44},
issn = {21945357},
year = {2016},
date = {2016-01-01},
booktitle = {Advances in Intelligent Systems and Computing},
volume = {371},
pages = {439--447},
publisher = {Springer},
abstract = {The paper addresses the problem of learning internal task-specific dynamic models for a reaching task. Using task-specific dynamic models is crucial for achieving both high tracking accuracy and compliant behaviour, which improves safety concerns while working in unstructured environment or with humans. The proposed approach uses programming by demonstration to learn new task-related movements encoded as Compliant Movement Primitives (CMPs). CMPs are a combination of position trajectories encoded in a form of Dynamic Movement Primitives (DMPs) and corresponding task-specific Torque Primitives (TPs) encoded as a linear combination of kernel functions. Unlike the DMPs, TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability we propose a novel method which autonomously learns task-specific TPs, based on a given kinematic trajectory in DMPs.},
keywords = {Compliance and Impedance Control, Human Motor Control, Machine Learning},
pubstate = {published},
tppubtype = {incollection}
}
The paper addresses the problem of learning internal task-specific dynamic models for a reaching task. Using task-specific dynamic models is crucial for achieving both high tracking accuracy and compliant behaviour, which improves safety concerns while working in unstructured environment or with humans. The proposed approach uses programming by demonstration to learn new task-related movements encoded as Compliant Movement Primitives (CMPs). CMPs are a combination of position trajectories encoded in a form of Dynamic Movement Primitives (DMPs) and corresponding task-specific Torque Primitives (TPs) encoded as a linear combination of kernel functions. Unlike the DMPs, TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability we propose a novel method which autonomously learns task-specific TPs, based on a given kinematic trajectory in DMPs.
Deniša, Miha; Gams, Andrej; Ude, Aleš; Petrič, Tadej
Learning Compliant Movement Primitives Through Demonstration and Statistical Generalization Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 21, no. 5, pp. 2581–2594, 2016, ISSN: 1083-4435.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Machine Learning | Links:
@article{Denisa2016,
title = {Learning Compliant Movement Primitives Through Demonstration and Statistical Generalization},
author = {Miha Deni\v{s}a and Andrej Gams and Ale\v{s} Ude and Tadej Petri\v{c}},
url = {http://ieeexplore.ieee.org/document/7360201/},
doi = {10.1109/TMECH.2015.2510165},
issn = {1083-4435},
year = {2016},
date = {2016-01-01},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {21},
number = {5},
pages = {2581--2594},
abstract = {In this paper, we address the problem of simultaneously achieving low trajectory tracking errors and compliant control without using explicit mathematical models of task dynamics. To achieve this goal, we propose a new movement representation called compliant movement primitives (CMPs), which encodes position trajectory and associated torque profiles and can be learned from a single user demonstration. With the proposed control framework, the robot can remain compliant and consequently safe for humans sharing its workspace, even if high trajectory tracking accuracy is required. We developed a statistical learning approach that can use a database of existing CMPs and compute new ones, adapted for novel task variations. The proposed approach was evaluated on a Kuka LWR-4 robot performing 1) a discrete pick-and-place task with objects of varying weight and 2) a periodic handle turning operation. The evaluation of the discrete task showed a 15-fold decrease of the tracking error while exhibiting compliant behavior compared to the standard feedback control approach. It also indicated no significant rise in the tracking error while using generalized primitives computed by the statistical learning method. With respect to unforeseen collisions, the proposed approach resulted in a 75% drop of contact forces compared to standard feedback control. The periodic task demonstrated on-line use of the proposed approach to accomplish a task of handle turning.},
keywords = {Compliance and Impedance Control, Machine Learning},
pubstate = {published},
tppubtype = {article}
}
In this paper, we address the problem of simultaneously achieving low trajectory tracking errors and compliant control without using explicit mathematical models of task dynamics. To achieve this goal, we propose a new movement representation called compliant movement primitives (CMPs), which encodes position trajectory and associated torque profiles and can be learned from a single user demonstration. With the proposed control framework, the robot can remain compliant and consequently safe for humans sharing its workspace, even if high trajectory tracking accuracy is required. We developed a statistical learning approach that can use a database of existing CMPs and compute new ones, adapted for novel task variations. The proposed approach was evaluated on a Kuka LWR-4 robot performing 1) a discrete pick-and-place task with objects of varying weight and 2) a periodic handle turning operation. The evaluation of the discrete task showed a 15-fold decrease of the tracking error while exhibiting compliant behavior compared to the standard feedback control approach. It also indicated no significant rise in the tracking error while using generalized primitives computed by the statistical learning method. With respect to unforeseen collisions, the proposed approach resulted in a 75% drop of contact forces compared to standard feedback control. The periodic task demonstrated on-line use of the proposed approach to accomplish a task of handle turning.
2015
Petrič, Tadej; Colasanto, Luca; Gams, Andrej; Ude, Aleš; Ijspeert, Auke J
Bio-inspired learning and database expansion of Compliant Movement Primitives Proceedings Article
In: 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), pp. 346–351, IEEE, Seoul, 2015, ISSN: 21640580.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Machine Learning | Links:
@inproceedings{Petric2015,
title = {Bio-inspired learning and database expansion of Compliant Movement Primitives},
author = {Tadej Petri\v{c} and Luca Colasanto and Andrej Gams and Ale\v{s} Ude and Auke J Ijspeert},
url = {http://ieeexplore.ieee.org/document/7363573/},
doi = {10.1109/HUMANOIDS.2015.7363573},
issn = {21640580},
year = {2015},
date = {2015-11-01},
booktitle = {2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids)},
pages = {346--351},
publisher = {IEEE},
address = {Seoul},
abstract = {The paper addresses the problem of learning torque primitives - the torques associated to a kinematic trajectory, and required in order to accurately track this kinematic trajectory. Learning torque primitives, which can be interpreted as internal dynamic models, is crucial to achieve at the same time (1) high tracking accuracy and (2) compliant behaviour. The latter improves the safety concerns of working in unstructured environments or with humans. In the proposed approach, first learning by demonstration is used to obtain the kinematic trajectories, which are encoded in the form of Dynamic Movement Primitives (DMPs). These are combined with the corresponding task-specific Torque Primitives (TPs), and together they form new task-related compliant movements, denoted as Compliant Movement Primitives (CMPs). Unlike the DMPs, the TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability, we propose a novel method which can autonomously learn task-specific Torque Primitives (TPs) associated to given kinematic trajectories in the form of DMPs. The proposed algorithm is completely autonomous, and can be used to rapidly generate and expand the database of CMPs motions. Since the CMPs are parameterized, statistical generalisation can be used to obtain an initial TP estimate of a new CMP motion. Thereby, the learning rate of new CMPs can be significantly improved. The evaluation of the proposed approach on a humanoid robot CoMan performing reaching task shows fast TP acquisition and accurate generalization estimates in real-world scenarios.},
keywords = {Compliance and Impedance Control, Kinematics, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper addresses the problem of learning torque primitives - the torques associated to a kinematic trajectory, and required in order to accurately track this kinematic trajectory. Learning torque primitives, which can be interpreted as internal dynamic models, is crucial to achieve at the same time (1) high tracking accuracy and (2) compliant behaviour. The latter improves the safety concerns of working in unstructured environments or with humans. In the proposed approach, first learning by demonstration is used to obtain the kinematic trajectories, which are encoded in the form of Dynamic Movement Primitives (DMPs). These are combined with the corresponding task-specific Torque Primitives (TPs), and together they form new task-related compliant movements, denoted as Compliant Movement Primitives (CMPs). Unlike the DMPs, the TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability, we propose a novel method which can autonomously learn task-specific Torque Primitives (TPs) associated to given kinematic trajectories in the form of DMPs. The proposed algorithm is completely autonomous, and can be used to rapidly generate and expand the database of CMPs motions. Since the CMPs are parameterized, statistical generalisation can be used to obtain an initial TP estimate of a new CMP motion. Thereby, the learning rate of new CMPs can be significantly improved. The evaluation of the proposed approach on a humanoid robot CoMan performing reaching task shows fast TP acquisition and accurate generalization estimates in real-world scenarios.

Peternel, Luka; Petrič, Tadej; Babič, Jan
Human-in-the-loop approach for teaching robot assembly tasks using impedance control interface Proceedings Article
In: 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 1497–1502, IEEE, Seattle, 2015, ISSN: 10504729.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Peternel2015a,
title = {Human-in-the-loop approach for teaching robot assembly tasks using impedance control interface},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7139387/},
doi = {10.1109/ICRA.2015.7139387},
issn = {10504729},
year = {2015},
date = {2015-01-01},
booktitle = {2015 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1497--1502},
publisher = {IEEE},
address = {Seattle},
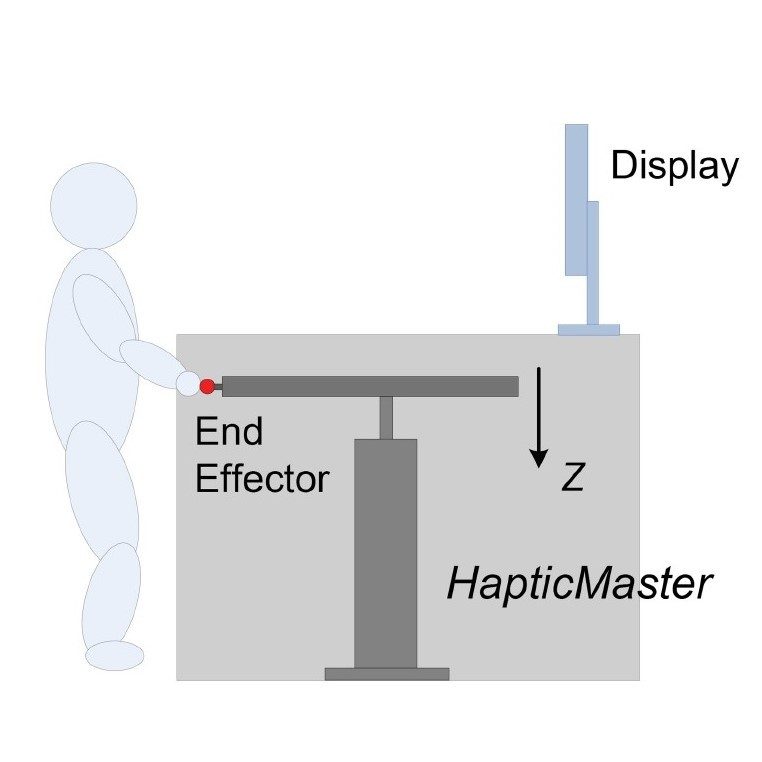
abstract = {In this paper we propose a human-in-the-loop approach for teaching robots how to solve part assembly tasks. In the proposed setup the human tutor controls the robot through a haptic interface and a hand-held impedance control interface. The impedance control interface is based on a linear spring-return potentiometer that maps the button position to the robot arm stiffness. This setup allows the tutor to modulate the robot compliance based on the given task requirements. The demonstrated motion and stiffness trajectories are encoded using Dynamical Movement Primitives and learnt using Locally Weight Regression. To validate the proposed approach we performed experiments using Kuka Light Weight Robot and HapticMaster robot. The task of the experiment was to teach the robot how to perform an assembly task involving sliding a bolt fitting inside a groove in order to mount two parts together. Different stiffness was required in different stages of the task execution to accommodate the interaction of the robot with the environment and possible human-robot cooperation.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a human-in-the-loop approach for teaching robots how to solve part assembly tasks. In the proposed setup the human tutor controls the robot through a haptic interface and a hand-held impedance control interface. The impedance control interface is based on a linear spring-return potentiometer that maps the button position to the robot arm stiffness. This setup allows the tutor to modulate the robot compliance based on the given task requirements. The demonstrated motion and stiffness trajectories are encoded using Dynamical Movement Primitives and learnt using Locally Weight Regression. To validate the proposed approach we performed experiments using Kuka Light Weight Robot and HapticMaster robot. The task of the experiment was to teach the robot how to perform an assembly task involving sliding a bolt fitting inside a groove in order to mount two parts together. Different stiffness was required in different stages of the task execution to accommodate the interaction of the robot with the environment and possible human-robot cooperation.
Deniša, Miha; Gams, Andrej; Ude, Aleš; Petrič, Tadej
Generalization of discrete Compliant Movement Primitives Proceedings Article
In: 2015 International Conference on Advanced Robotics (ICAR), pp. 565–572, IEEE, Istanbul, 2015, ISBN: 978-1-4673-7509-2.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Optimal Control | Links:
@inproceedings{Denisa2015,
title = {Generalization of discrete Compliant Movement Primitives},
author = {Miha Deni\v{s}a and Andrej Gams and Ale\v{s} Ude and Tadej Petri\v{c}},
url = {http://ieeexplore.ieee.org/document/7251512/},
doi = {10.1109/ICAR.2015.7251512},
isbn = {978-1-4673-7509-2},
year = {2015},
date = {2015-01-01},
booktitle = {2015 International Conference on Advanced Robotics (ICAR)},
number = {1},
pages = {565--572},
publisher = {IEEE},
address = {Istanbul},
abstract = {This paper addresses the problem of achieving high robot compliance while maintaining low tracking error without the use of dynamical models. The proposed approach uses programing by demonstration to learn new task related compliant movement. The presented Compliant Movement Primitives are a combination of 1) position trajectories, gained through human demonstration and encoded as Dynamical Movement Primitives and 2) corresponding torque trajectories encoded as a linear combination of radial basis functions. A set of example Compliant Movement Primitives is used with statistical generalization in order to execute previously unexplored tasks inside the training space. The proposed control approach and generalization was evaluated with a discrete pick-and-place task on a Kuka LWR robot. The evaluation showed a major decrease in tracking error compared to a classic feedback approach and no significant rise in tracking error while using generalized Compliant Movement Primitives.},
keywords = {Compliance and Impedance Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper addresses the problem of achieving high robot compliance while maintaining low tracking error without the use of dynamical models. The proposed approach uses programing by demonstration to learn new task related compliant movement. The presented Compliant Movement Primitives are a combination of 1) position trajectories, gained through human demonstration and encoded as Dynamical Movement Primitives and 2) corresponding torque trajectories encoded as a linear combination of radial basis functions. A set of example Compliant Movement Primitives is used with statistical generalization in order to execute previously unexplored tasks inside the training space. The proposed control approach and generalization was evaluated with a discrete pick-and-place task on a Kuka LWR robot. The evaluation showed a major decrease in tracking error compared to a classic feedback approach and no significant rise in tracking error while using generalized Compliant Movement Primitives.
2014

Peternel, Luka; Petrič, Tadej; Oztop, Erhan; Babič, Jan
Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach Journal Article
In: Autonomous Robots, vol. 36, no. 1-2, pp. 123–136, 2014, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@article{Peternel2014b,
title = {Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach},
author = {Luka Peternel and Tadej Petri\v{c} and Erhan Oztop and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-013-9361-0},
doi = {10.1007/s10514-013-9361-0},
issn = {0929-5593},
year = {2014},
date = {2014-01-01},
journal = {Autonomous Robots},
volume = {36},
number = {1-2},
pages = {123--136},
abstract = {We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.
2013
Peternel, Luka; Babič, Jan
Learning of compliant human–robot interaction using full-body haptic interface Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 1003–1012, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Peternel2013b,
title = {Learning of compliant human\textendashrobot interaction using full-body haptic interface},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.808305},
doi = {10.1080/01691864.2013.808305},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {1003--1012},
publisher = {Taylor \& Francis},
abstract = {We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.
Petrič, Tadej; Gams, Andrej; Debevec, Tadej; Žlajpah, Leon; Babič, Jan
Control approaches for robotic knee exoskeleton and their effects on human motion Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 993–1002, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Petric2013a,
title = {Control approaches for robotic knee exoskeleton and their effects on human motion},
author = {Tadej Petri\v{c} and Andrej Gams and Tadej Debevec and Leon \v{Z}lajpah and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.804164},
doi = {10.1080/01691864.2013.804164},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {993--1002},
publisher = {Taylor \& Francis},
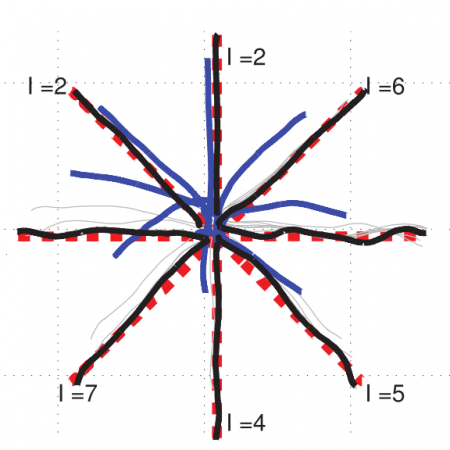
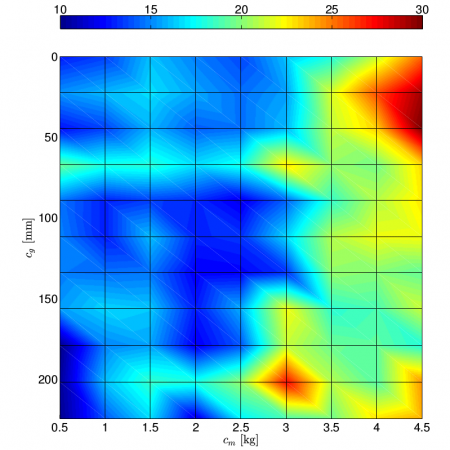
abstract = {In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics. In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics. In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics.
Deniša, Miha; Petrič, Tadej; Asfour, Tamim; Ude, Aleš
Synthesizing compliant reaching movements by searching a database of example trajectories Proceedings Article
In: 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), pp. 540–546, IEEE, Atlanta, 2013, ISBN: 978-1-4799-2617-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics | Links:
@inproceedings{Denisa2013,
title = {Synthesizing compliant reaching movements by searching a database of example trajectories},
author = {Miha Deni\v{s}a and Tadej Petri\v{c} and Tamim Asfour and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/7030026/},
doi = {10.1109/HUMANOIDS.2013.7030026},
isbn = {978-1-4799-2617-6},
year = {2013},
date = {2013-01-01},
booktitle = {2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids)},
pages = {540--546},
publisher = {IEEE},
address = {Atlanta},
abstract = {We address the problem of generating new com- pliant reaching movements by searching a structured database of example trajectories. The proposed control framework is a multi-step process, where in the first step a human tutor teaches the robot how to perform a set of example reaching movements. In the second step, the recorded motion trajectories are executed with different velocities using a high gain feedback controller, for the purpose of learning corresponding torque control signals. The commanded torques are measured and stored together with the trajectory data. This data is organized in a hierarchical, graph-like structure, thereby providing the basis for search for new compliant trajectories, which can consist of parts of the previously acquired example movements. The proposed approach can construct a complete representation for newly discovered movements, including the feedforward torque commands. Finally, in the last step, the motion is executed using a low gain feedback controller and the associated feedforward torque signal. This ensures sufficient tracking accuracy and at the same time compliant behavior, which allows smooth interaction with the environment and is safe for cooperative task execution with humans. The usefulness of the proposed method was shown on a Kuka LWR robot.},
keywords = {Compliance and Impedance Control, Kinematics},
pubstate = {published},
tppubtype = {inproceedings}
}
We address the problem of generating new com- pliant reaching movements by searching a structured database of example trajectories. The proposed control framework is a multi-step process, where in the first step a human tutor teaches the robot how to perform a set of example reaching movements. In the second step, the recorded motion trajectories are executed with different velocities using a high gain feedback controller, for the purpose of learning corresponding torque control signals. The commanded torques are measured and stored together with the trajectory data. This data is organized in a hierarchical, graph-like structure, thereby providing the basis for search for new compliant trajectories, which can consist of parts of the previously acquired example movements. The proposed approach can construct a complete representation for newly discovered movements, including the feedforward torque commands. Finally, in the last step, the motion is executed using a low gain feedback controller and the associated feedforward torque signal. This ensures sufficient tracking accuracy and at the same time compliant behavior, which allows smooth interaction with the environment and is safe for cooperative task execution with humans. The usefulness of the proposed method was shown on a Kuka LWR robot.
2011
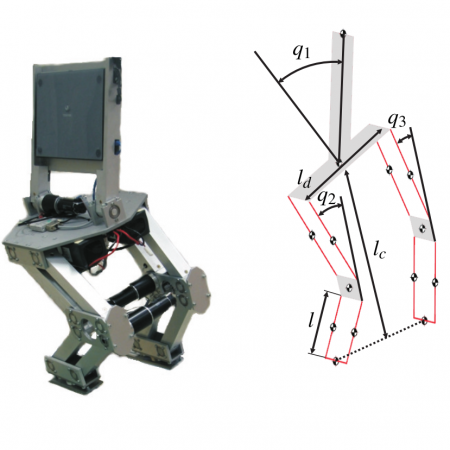
Petrič, Tadej; Nemec, Bojan; Babič, Jan; Žlajpah, Leon
Multilayer control of skiing robot Proceedings Article
In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4832–4837, IEEE, San Francisco, 2011, ISBN: 978-1-61284-454-1.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion | Links:
@inproceedings{Petric2011,
title = {Multilayer control of skiing robot},
author = {Tadej Petri\v{c} and Bojan Nemec and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {https://ieeexplore.ieee.org/document/6094546/},
doi = {10.1109/IROS.2011.6048154},
isbn = {978-1-61284-454-1},
year = {2011},
date = {2011-09-01},
booktitle = {2011 IEEE/RSJ International Conference on Intelligent Robots and Systems},
pages = {4832--4837},
publisher = {IEEE},
address = {San Francisco},
abstract = {In this paper we propose a novel method for ensuring stability of a skiing robot on a previously unknown ski slope. The method is based on a null-space velocity control algorithm, which is essential for achieving good behavior of redundant robotic systems. Using the pseudo-inverse, the task and the null-space motions are decoupled. For the skiing robot, the primary task is stability, the secondary task is the direction and the third task is the pose of the robot. The dynamic stability index of the skiing robot is defined with the normalized zero moment point. We demonstrated the effectiveness of the proposed method both in simulation in the virtual reality environment as well as on the real robot.},
keywords = {Compliance and Impedance Control, Dynamic Motion},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel method for ensuring stability of a skiing robot on a previously unknown ski slope. The method is based on a null-space velocity control algorithm, which is essential for achieving good behavior of redundant robotic systems. Using the pseudo-inverse, the task and the null-space motions are decoupled. For the skiing robot, the primary task is stability, the secondary task is the direction and the third task is the pose of the robot. The dynamic stability index of the skiing robot is defined with the normalized zero moment point. We demonstrated the effectiveness of the proposed method both in simulation in the virtual reality environment as well as on the real robot.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si