




2025
Arditi, Emir; Kunavar, Tjasa; Amirshirzad, Negin; Ugur, Emre; Babič, Jan; Oztop, Erhan
Inferring effort-safety trade off in perturbed squat-to-stand task by reward parameter estimation Journal Article
In: Engineering Applications of Artificial Intelligence, vol. 142, pp. 109778, 2025, ISSN: 09521976.
Abstract | BibTeX | Tags: Human Motor Control, Machine Learning, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning | Links:
@article{Arditi2025,
title = {Inferring effort-safety trade off in perturbed squat-to-stand task by reward parameter estimation},
author = {Emir Arditi and Tjasa Kunavar and Negin Amirshirzad and Emre Ugur and Jan Babi\v{c} and Erhan Oztop},
doi = {10.1016/j.engappai.2024.109778},
issn = {09521976},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Engineering Applications of Artificial Intelligence},
volume = {142},
pages = {109778},
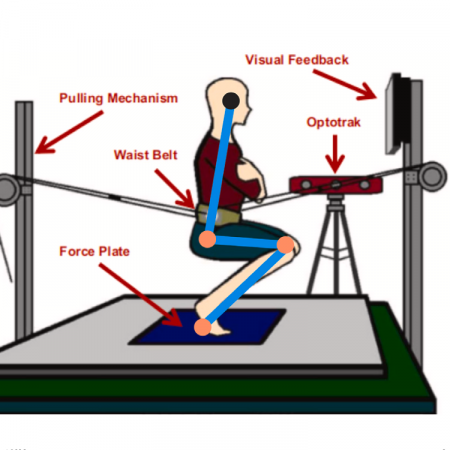
abstract = {In this study, an inverse reinforcement learning (IRL) method is developed to estimate the parameters of a reward function that is assumed to guide the movement of a biological or artificial agent. The workings of the method is shown on the problem of estimating the effort-safety trade-off of humans during perturbed squat-to-stand motions based on their Center of Mass (COM) trajectories. The proposed method involves data generation by reinforcement learning (RL) and a novel data augmentation mechanism followed by neural network training. After the training, the neural network acts as the reward parameter estimator given the Center of Mass (COM) trajectories as input. The performance of the developed method is assessed through systematic simulation experiments, where it is shown that the parameter estimation made by our method is significantly more accurate than the baseline of an optimized template-based IRL approach. In addition, as a proof of concept, a set of human movement data is analyzed with the developed method. The results revealed that most participants acquired a strategy that ensures low effort expenditure with a safety margin, producing COM trajectories slightly away from the effort-optimal.},
keywords = {Human Motor Control, Machine Learning, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In this study, an inverse reinforcement learning (IRL) method is developed to estimate the parameters of a reward function that is assumed to guide the movement of a biological or artificial agent. The workings of the method is shown on the problem of estimating the effort-safety trade-off of humans during perturbed squat-to-stand motions based on their Center of Mass (COM) trajectories. The proposed method involves data generation by reinforcement learning (RL) and a novel data augmentation mechanism followed by neural network training. After the training, the neural network acts as the reward parameter estimator given the Center of Mass (COM) trajectories as input. The performance of the developed method is assessed through systematic simulation experiments, where it is shown that the parameter estimation made by our method is significantly more accurate than the baseline of an optimized template-based IRL approach. In addition, as a proof of concept, a set of human movement data is analyzed with the developed method. The results revealed that most participants acquired a strategy that ensures low effort expenditure with a safety margin, producing COM trajectories slightly away from the effort-optimal.
Babič, Jan; Kunavar, Tjasa; Oztop, Erhan; Kawato, Mitsuo
Success-efficient/failure-safe strategy for hierarchical reinforcement motor learning Journal Article
In: PLOS Computational Biology, vol. 21, iss. 5, pp. e1013089, 2025, ISSN: 1553-7358.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Babi2025,
title = {Success-efficient/failure-safe strategy for hierarchical reinforcement motor learning},
author = {Jan Babi\v{c} and Tjasa Kunavar and Erhan Oztop and Mitsuo Kawato},
doi = {10.1371/journal.pcbi.1013089},
issn = {1553-7358},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {PLOS Computational Biology},
volume = {21},
issue = {5},
pages = {e1013089},
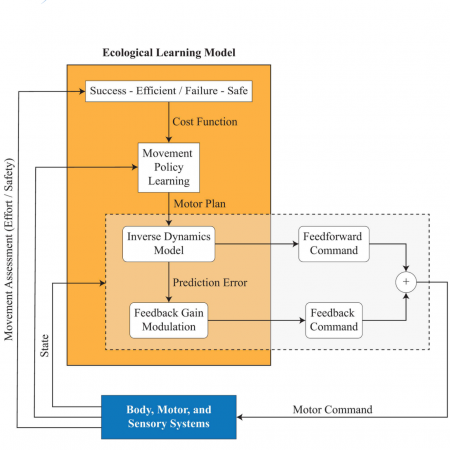
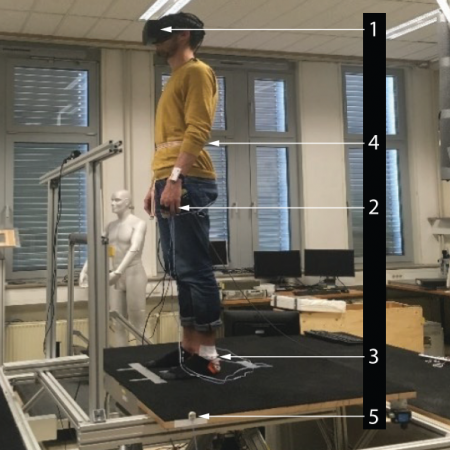
abstract = {Our study explores how ecological aspects of motor learning enhance survival by improving movement efficiency and mitigating injury risks during task failures. Traditional motor control theories mainly address isolated body movements and often overlook these ecological factors. We introduce a novel computational motor control approach, incorporating ecological fitness and a strategy that alternates between success-driven movement efficiency and failure-driven safety, akin to win-stay/lose-shift tactics. In our experiments, participants performed squat-to-stand movements under novel force perturbations. They adapted effectively through various adaptive motor control mechanisms to avoid falls, reducing failure rates rapidly. The results indicate a high-level ecological controller in human motor learning that switches objectives between safety and movement efficiency, depending on failure or success. This approach is supported by policy learning, internal model adaptation, and adaptive feedback control. Our findings offer a comprehensive perspective on human motor control, integrating risk management in a hierarchical reinforcement learning framework for real-world environments.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Our study explores how ecological aspects of motor learning enhance survival by improving movement efficiency and mitigating injury risks during task failures. Traditional motor control theories mainly address isolated body movements and often overlook these ecological factors. We introduce a novel computational motor control approach, incorporating ecological fitness and a strategy that alternates between success-driven movement efficiency and failure-driven safety, akin to win-stay/lose-shift tactics. In our experiments, participants performed squat-to-stand movements under novel force perturbations. They adapted effectively through various adaptive motor control mechanisms to avoid falls, reducing failure rates rapidly. The results indicate a high-level ecological controller in human motor learning that switches objectives between safety and movement efficiency, depending on failure or success. This approach is supported by policy learning, internal model adaptation, and adaptive feedback control. Our findings offer a comprehensive perspective on human motor control, integrating risk management in a hierarchical reinforcement learning framework for real-world environments.
Kunavar, Tjasa; Kroflic, Niko; Jamšek, Marko; Babič, Jan
Influence of video gaming experience on motor adaptation during visuomotor and force field perturbations Journal Article
In: Heliyon, vol. 11, iss. 10, pp. e43109, 2025, ISSN: 24058440.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Kunavar2025,
title = {Influence of video gaming experience on motor adaptation during visuomotor and force field perturbations},
author = {Tjasa Kunavar and Niko Kroflic and Marko Jam\v{s}ek and Jan Babi\v{c}},
doi = {10.1016/j.heliyon.2025.e43109},
issn = {24058440},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Heliyon},
volume = {11},
issue = {10},
pages = {e43109},
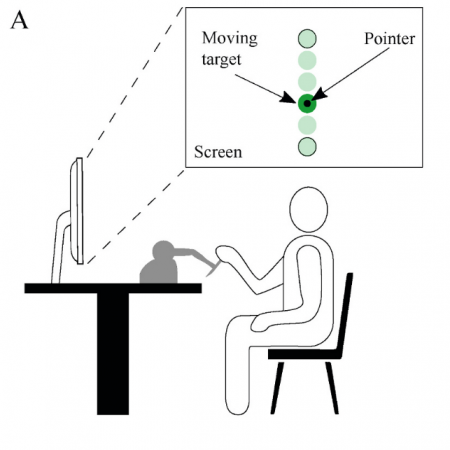
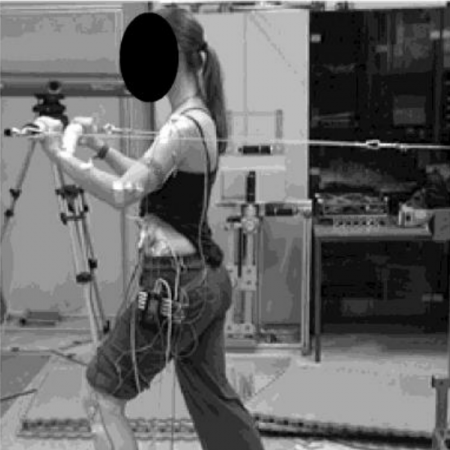
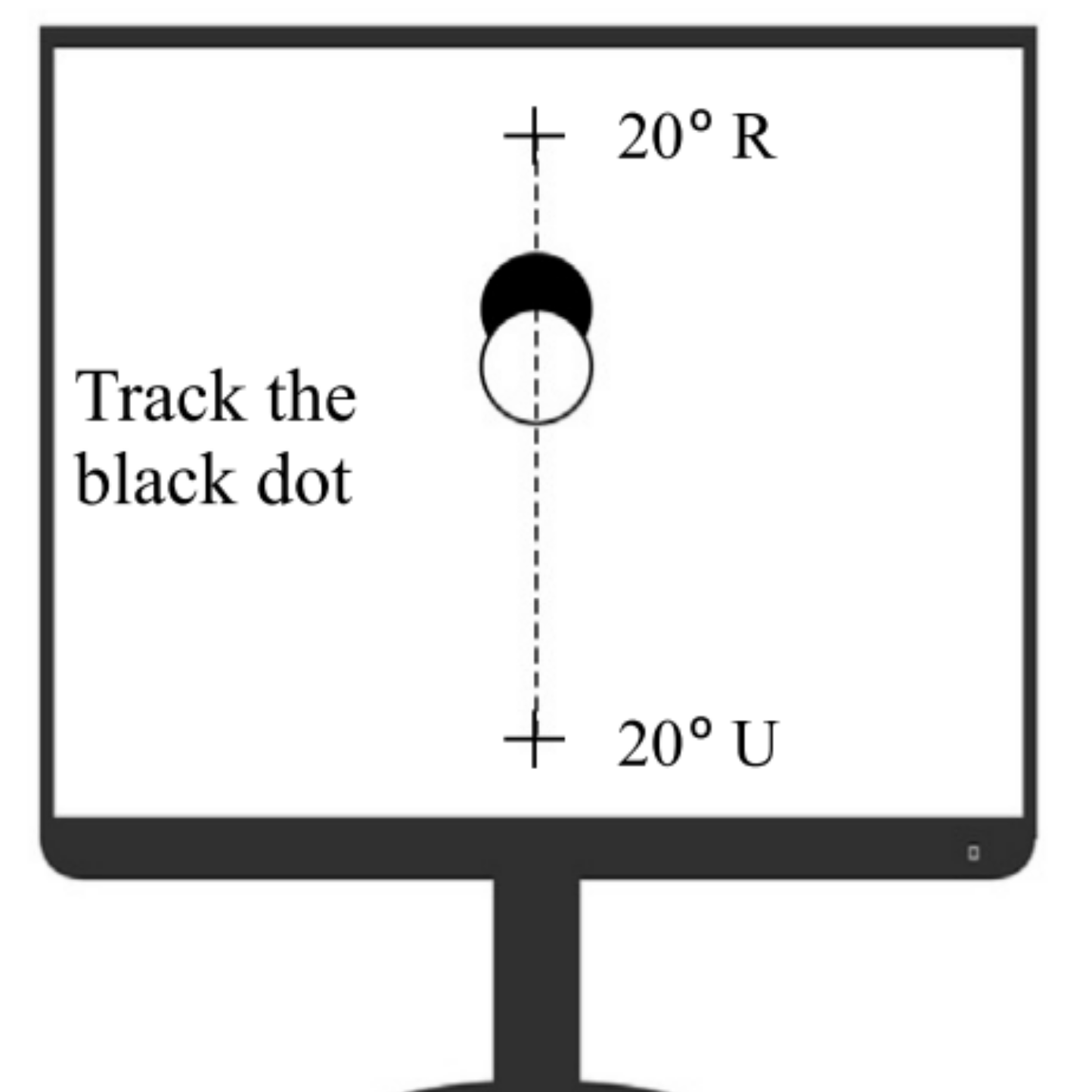
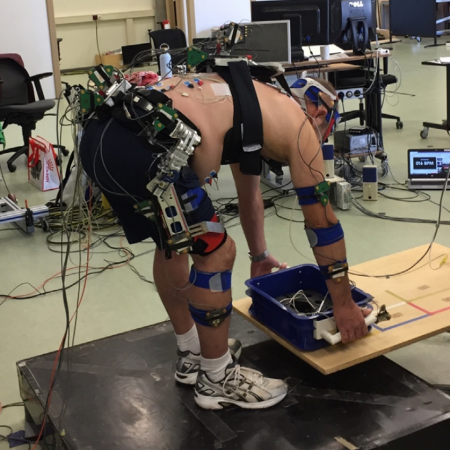
abstract = {The capacity for quick and agile motor adaptations can be enhanced through related previous motor experience. This study explores the influence of prior long-term experience in playing action video games on the ability to adapt to novel motor beha viors. We compared motor adaptation between professional video game players, casual players who play video games on afrequent or infrequent basis, and non-gamers. Participants performed a tracking task where they had to adapt to novel visuomotor perturbation and an arm reaching task where they had to adapt to novel force field perturbation. Results showed that experience with action video games enhanced the process of adapting to novel complex visuomotor perturbation during a tracking task. On the other hand, the gaming experience had no effects on the process of adapting to force field perturbation during an arm reaching task. Since the tasks differ in the type of perturbation (and therefore the type of transformation needed for adaptation), the difficulty of perturbation, and the type of movement performed, the exact reason for the difference in the results should be further investigated. However, our results show that everyday experience with gaming can have an effect on the ability to adapt to certain types of novel motor behaviors. Our findings demonstrate the potential of everyday experiences in rehabilitation and training protocols, but highlight the need to consider the specific types of learning required.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The capacity for quick and agile motor adaptations can be enhanced through related previous motor experience. This study explores the influence of prior long-term experience in playing action video games on the ability to adapt to novel motor beha viors. We compared motor adaptation between professional video game players, casual players who play video games on afrequent or infrequent basis, and non-gamers. Participants performed a tracking task where they had to adapt to novel visuomotor perturbation and an arm reaching task where they had to adapt to novel force field perturbation. Results showed that experience with action video games enhanced the process of adapting to novel complex visuomotor perturbation during a tracking task. On the other hand, the gaming experience had no effects on the process of adapting to force field perturbation during an arm reaching task. Since the tasks differ in the type of perturbation (and therefore the type of transformation needed for adaptation), the difficulty of perturbation, and the type of movement performed, the exact reason for the difference in the results should be further investigated. However, our results show that everyday experience with gaming can have an effect on the ability to adapt to certain types of novel motor behaviors. Our findings demonstrate the potential of everyday experiences in rehabilitation and training protocols, but highlight the need to consider the specific types of learning required.

Jamšek, Marko; Rueckert, Elmar; Babič, Jan
Step Length Prediction in Real Time Using Probabilistic Movement Primitives Proceedings Article
In: 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), pp. 814-820, IEEE, 2025, ISBN: 979-8-3315-9869-3.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling | Links:
@inproceedings{Jamek2025b,
title = {Step Length Prediction in Real Time Using Probabilistic Movement Primitives},
author = {Marko Jam\v{s}ek and Elmar Rueckert and Jan Babi\v{c}},
doi = {10.1109/Humanoids65713.2025.11203051},
isbn = {979-8-3315-9869-3},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids)},
pages = {814-820},
publisher = {IEEE},
abstract = {Accurately predicting where a person will place their foot during walking has practical value in applications that require close coordination between humans and machines, such as exoskeletons that adapt to a user\'s movement, or systems that detect and prevent trips and falls in real-world environments. Current methods often rely on complex models or offline analysis. In this paper, we present the use of probabilistic movement primitives (ProMPs) for predicting user step lengths in real time during walking on a treadmill. We used kinematic data acquired with an inertial measurement system to mimic data potentially gatherable from a wearable exoskeleton, avoiding the need for external motion capture. We evaluated the method with nine subjects walking on a treadmill. We show accurate prediction of user step length as early as 100 ms after movement onset during the foot\'s swing phase. This method could be extended and integrated with environmental monitoring systems to predict potential foot-obstacle collisions in real time.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
Accurately predicting where a person will place their foot during walking has practical value in applications that require close coordination between humans and machines, such as exoskeletons that adapt to a user's movement, or systems that detect and prevent trips and falls in real-world environments. Current methods often rely on complex models or offline analysis. In this paper, we present the use of probabilistic movement primitives (ProMPs) for predicting user step lengths in real time during walking on a treadmill. We used kinematic data acquired with an inertial measurement system to mimic data potentially gatherable from a wearable exoskeleton, avoiding the need for external motion capture. We evaluated the method with nine subjects walking on a treadmill. We show accurate prediction of user step length as early as 100 ms after movement onset during the foot's swing phase. This method could be extended and integrated with environmental monitoring systems to predict potential foot-obstacle collisions in real time.
2024

Kunavar, Tjasa; Jamšek, Marko; Avila-Mireles, Edwin Johnatan; Rueckert, Elmar; Peternel, Luka; Babič, Jan
The Effects of Different Motor Teaching Strategies on Learning a Complex Motor Task Journal Article
In: Sensors, vol. 24, iss. 4, pp. 1231, 2024, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Kunavar2024,
title = {The Effects of Different Motor Teaching Strategies on Learning a Complex Motor Task},
author = {Tjasa Kunavar and Marko Jam\v{s}ek and Edwin Johnatan Avila-Mireles and Elmar Rueckert and Luka Peternel and Jan Babi\v{c}},
doi = {10.3390/s24041231},
issn = {1424-8220},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Sensors},
volume = {24},
issue = {4},
pages = {1231},
abstract = {During the learning of a new sensorimotor task, individuals are usually provided with instructional stimuli and relevant information about the target task. The inclusion of haptic devices in the study of this kind of learning has greatly helped in the understanding of how an individual can improve or acquire new skills. However, the way in which the information and stimuli are delivered has not been extensively explored. We have designed a challenging task with nonintuitive visuomotor perturbation that allows us to apply and compare different motor strategies to study the teaching process and to avoid the interference of previous knowledge present in the na\"{i}ve subjects. Three subject groups participated in our experiment, where the learning by repetition without assistance, learning by repetition with assistance, and task Segmentation Learning techniques were performed with a haptic robot. Our results show that all the groups were able to successfully complete the task and that the subjects’ performance during training and evaluation was not affected by modifying the teaching strategy. Nevertheless, our results indicate that the presented task design is useful for the study of sensorimotor teaching and that the presented metrics are suitable for exploring the evolution of the accuracy and precision during learning.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
During the learning of a new sensorimotor task, individuals are usually provided with instructional stimuli and relevant information about the target task. The inclusion of haptic devices in the study of this kind of learning has greatly helped in the understanding of how an individual can improve or acquire new skills. However, the way in which the information and stimuli are delivered has not been extensively explored. We have designed a challenging task with nonintuitive visuomotor perturbation that allows us to apply and compare different motor strategies to study the teaching process and to avoid the interference of previous knowledge present in the naïve subjects. Three subject groups participated in our experiment, where the learning by repetition without assistance, learning by repetition with assistance, and task Segmentation Learning techniques were performed with a haptic robot. Our results show that all the groups were able to successfully complete the task and that the subjects’ performance during training and evaluation was not affected by modifying the teaching strategy. Nevertheless, our results indicate that the presented task design is useful for the study of sensorimotor teaching and that the presented metrics are suitable for exploring the evolution of the accuracy and precision during learning.
Sorrentino, Riccardo G.; Avila‐Mireles, Edwin Johnatan; Babič, Jan; Supej, Matej; Mekjavic, Igor B.; McDonnell, Adam C.
Comparison of joint kinematics between upright front squat exercise and horizontal squat exercise performed on a short arm human centrifugation Journal Article
In: Physiological Reports, vol. 12, iss. 13, 2024, ISSN: 2051-817X.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Sorrentino2024,
title = {Comparison of joint kinematics between upright front squat exercise and horizontal squat exercise performed on a short arm human centrifugation},
author = {Riccardo G. Sorrentino and Edwin Johnatan Avila‐Mireles and Jan Babi\v{c} and Matej Supej and Igor B. Mekjavic and Adam C. McDonnell},
doi = {10.14814/phy2.16034},
issn = {2051-817X},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Physiological Reports},
volume = {12},
issue = {13},
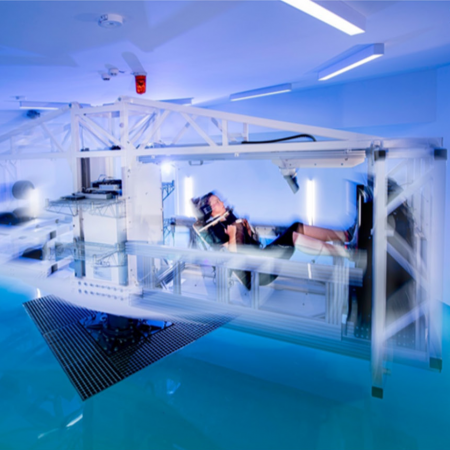
abstract = {This study compared the joint kinematics between the front squat (FS) conducted in the upright (natural gravity) position and in the supine position on a short arm human centrifuge (SAHC). Male participants ( \<italic\>N\</italic\> = 12) with no prior experience exercising on a centrifuge completed a FS in the upright position before (PRE) and after (POST) a FS exercise conducted on the SAHC while exposed to artificial gravity (AG). Participants completed, in randomized order, three sets of six repetitions with a load equal to body weight or 1.25 × body weight for upright squats, and 1 g and 1.25 g at the center of gravity (COG) for AG. During the terrestrial squats, the load was applied with a barbell. Knee (left/right) and hip (left/right) flexion angles were recorded with a set of inertial measurement units. AG decreased the maximum flexion angle (MAX) of knees and hips as well as the range of motion (ROM), both at 1 and 1.25 g. Minor adaptation was observed between the first and the last repetition performed in AG. AG affects the ability to FS in na\"{i}ve participants by reducing MAX, MIN and ROM of the knees and hip.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
This study compared the joint kinematics between the front squat (FS) conducted in the upright (natural gravity) position and in the supine position on a short arm human centrifuge (SAHC). Male participants ( <italic>N</italic> = 12) with no prior experience exercising on a centrifuge completed a FS in the upright position before (PRE) and after (POST) a FS exercise conducted on the SAHC while exposed to artificial gravity (AG). Participants completed, in randomized order, three sets of six repetitions with a load equal to body weight or 1.25 × body weight for upright squats, and 1 g and 1.25 g at the center of gravity (COG) for AG. During the terrestrial squats, the load was applied with a barbell. Knee (left/right) and hip (left/right) flexion angles were recorded with a set of inertial measurement units. AG decreased the maximum flexion angle (MAX) of knees and hips as well as the range of motion (ROM), both at 1 and 1.25 g. Minor adaptation was observed between the first and the last repetition performed in AG. AG affects the ability to FS in naïve participants by reducing MAX, MIN and ROM of the knees and hip.
2023
Dežman, Miha; Massardi, Stefano; Pinto-Fernandez, David; Grosu, Victor; Rodriguez-Guerrero, Carlos; Babič, Jan; Torricelli, Diego
A mechatronic leg replica to benchmark human–exoskeleton physical interactions Journal Article
In: Bioinspiration & Biomimetics, vol. 18, iss. 3, pp. 036009, 2023, ISSN: 1748-3182.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design | Links:
@article{dezman2023,
title = {A mechatronic leg replica to benchmark human\textendashexoskeleton physical interactions},
author = {Miha De\v{z}man and Stefano Massardi and David Pinto-Fernandez and Victor Grosu and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Diego Torricelli},
doi = {10.1088/1748-3190/accda8},
issn = {1748-3182},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Bioinspiration \& Biomimetics},
volume = {18},
issue = {3},
pages = {036009},
abstract = {Evaluating human\textendashexoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Evaluating human–exoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.
Kunavar, Tjasa; Cheng, Xiaoxiao; Franklin, David W.; Burdet, Etienne; Babič, Jan
Explicit learning based on reward prediction error facilitates agile motor adaptations Journal Article
In: PLOS ONE, vol. 18, iss. 12, pp. e0295274, 2023, ISSN: 1932-6203.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control | Links:
@article{Kunavar2023,
title = {Explicit learning based on reward prediction error facilitates agile motor adaptations},
author = {Tjasa Kunavar and Xiaoxiao Cheng and David W. Franklin and Etienne Burdet and Jan Babi\v{c}},
doi = {10.1371/journal.pone.0295274},
issn = {1932-6203},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {PLOS ONE},
volume = {18},
issue = {12},
pages = {e0295274},
abstract = {Error based motor learning can be driven by both sensory prediction error and reward prediction error. Learning based on sensory prediction error is termed sensorimotor adaptation, while learning based on reward prediction error is termed reward learning. To investigate the characteristics and differences between sensorimotor adaptation and reward learning, we adapted a visuomotor paradigm where subjects performed arm movements while presented with either the sensory prediction error, signed end-point error, or binary reward. Before each trial, perturbation indicators in the form of visual cues were presented to inform the subjects of the presence and direction of the perturbation. To analyse the interconnection between sensorimotor adaptation and reward learning, we designed a computational model that distinguishes between the two prediction errors. Our results indicate that subjects adapted to novel perturbations irrespective of the type of prediction error they received during learning, and they converged towards the same movement patterns. Sensorimotor adaptations led to a pronounced aftereffect, while adaptation based on reward consequences produced smaller aftereffects suggesting that reward learning does not alter the internal model to the same degree as sensorimotor adaptation. Even though all subjects had learned to counteract two different perturbations separately, only those who relied on explicit learning using reward prediction error could timely adapt to the randomly changing perturbation. The results from the computational model suggest that sensorimotor and reward learning operate through distinct adaptation processes and that only sensorimotor adaptation changes the internal model, whereas reward learning employs explicit strategies that do not result in aftereffects. Additionally, we demonstrate that when humans learn motor tasks, they utilize both learning processes to successfully adapt to the new environments.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Error based motor learning can be driven by both sensory prediction error and reward prediction error. Learning based on sensory prediction error is termed sensorimotor adaptation, while learning based on reward prediction error is termed reward learning. To investigate the characteristics and differences between sensorimotor adaptation and reward learning, we adapted a visuomotor paradigm where subjects performed arm movements while presented with either the sensory prediction error, signed end-point error, or binary reward. Before each trial, perturbation indicators in the form of visual cues were presented to inform the subjects of the presence and direction of the perturbation. To analyse the interconnection between sensorimotor adaptation and reward learning, we designed a computational model that distinguishes between the two prediction errors. Our results indicate that subjects adapted to novel perturbations irrespective of the type of prediction error they received during learning, and they converged towards the same movement patterns. Sensorimotor adaptations led to a pronounced aftereffect, while adaptation based on reward consequences produced smaller aftereffects suggesting that reward learning does not alter the internal model to the same degree as sensorimotor adaptation. Even though all subjects had learned to counteract two different perturbations separately, only those who relied on explicit learning using reward prediction error could timely adapt to the randomly changing perturbation. The results from the computational model suggest that sensorimotor and reward learning operate through distinct adaptation processes and that only sensorimotor adaptation changes the internal model, whereas reward learning employs explicit strategies that do not result in aftereffects. Additionally, we demonstrate that when humans learn motor tasks, they utilize both learning processes to successfully adapt to the new environments.
2022
Takahashi, Chie; Azad, Morteza; Rajasekaran, Vijaykumar; Babič, Jan; Mistry, Michael
Human Stiffness Perception and Learning in Interacting With Compliant Environments Journal Article
In: Frontiers in Neuroscience, vol. 16, no. June, pp. 1–13, 2022, ISSN: 1662-453X.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Takahashi2022,
title = {Human Stiffness Perception and Learning in Interacting With Compliant Environments},
author = {Chie Takahashi and Morteza Azad and Vijaykumar Rajasekaran and Jan Babi\v{c} and Michael Mistry},
url = {https://www.frontiersin.org/articles/10.3389/fnins.2022.841901/full},
doi = {10.3389/fnins.2022.841901},
issn = {1662-453X},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
journal = {Frontiers in Neuroscience},
volume = {16},
number = {June},
pages = {1--13},
abstract = {Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.},
keywords = {Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.
Fritzsche, Lars; Gärtner, Christian; Spitzhirn, Michael; Galibarov, Pavel E; Damsgaard, Michael; Maurice, Pauline; Babič, Jan
Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results Proceedings Article
In: Black, Nancy L; Neumann, W Patrick; Noy, Ian (Ed.): Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), pp. 353–357, Springer International Publishing, Cham, 2022, ISBN: 978-3-030-74614-8.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction
@inproceedings{10.1007/978-3-030-74614-8_43,
title = {Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results},
author = {Lars Fritzsche and Christian G\"{a}rtner and Michael Spitzhirn and Pavel E Galibarov and Michael Damsgaard and Pauline Maurice and Jan Babi\v{c}},
editor = {Nancy L Black and W Patrick Neumann and Ian Noy},
isbn = {978-3-030-74614-8},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021)},
pages = {353--357},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.
2021
Sever, Jernej; Babič, Jan; Kozinc, Žiga; Šarabon, Nejc
Postural responses to sudden horizontal perturbations in tai chi practitioners Journal Article
In: International Journal of Environmental Research and Public Health, vol. 18, no. 5, pp. 1–12, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport | Links:
@article{Sever2021,
title = {Postural responses to sudden horizontal perturbations in tai chi practitioners},
author = {Jernej Sever and Jan Babi\v{c} and \v{Z}iga Kozinc and Nejc \v{S}arabon},
doi = {10.3390/ijerph18052692},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {5},
pages = {1--12},
abstract = {Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p \< 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005\textendash0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport},
pubstate = {published},
tppubtype = {article}
}
Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p < 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005–0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.

Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
In: International Journal of Environmental Research and Public Health, vol. 18, no. 1, pp. 1–9, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Kozinc2021a,
title = {Comparison of subjective responses of low back pain patients and asymptomatic controls to use of spinal exoskeleton during simple load lifting tasks: A pilot study},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/ijerph18010161},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {1},
pages = {1--9},
abstract = {Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0\textendash10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0–10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.

Fritzsche, Lars; Galibarov, Pavel E.; Gartner, Christian; Bornmann, Jonas; Damsgaard, Michael; Wall, Rudolf; Schirrmeister, Benjamin; Gonzalez-Vargas, Jose; Pucci, Daniele; Maurice, Pauline; Ivaldi, Serena; Babič, Jan
Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System Journal Article
In: Wearable Technologies, vol. 2, 2021.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@article{Fritzsche2021,
title = {Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System},
author = {Lars Fritzsche and Pavel E. Galibarov and Christian Gartner and Jonas Bornmann and Michael Damsgaard and Rudolf Wall and Benjamin Schirrmeister and Jose Gonzalez-Vargas and Daniele Pucci and Pauline Maurice and Serena Ivaldi and Jan Babi\v{c}},
doi = {10.1017/wtc.2021.5},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Wearable Technologies},
volume = {2},
abstract = {IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.

Gorjan, Daša; Bellicha, Angelina; Čamernik, Jernej; Bachta, Wael; Babič, Jan
Induced stabilization of center of mass decreases variability of center of pressure regardless of visual or tactile information Journal Article
In: Journal of Biomechanics, vol. 117, 2021, ISSN: 18732380.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Gorjan2021,
title = {Induced stabilization of center of mass decreases variability of center of pressure regardless of visual or tactile information},
author = {Da\v{s}a Gorjan and Angelina Bellicha and Jernej \v{C}amernik and Wael Bachta and Jan Babi\v{c}},
doi = {10.1016/j.jbiomech.2020.110199},
issn = {18732380},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Journal of Biomechanics},
volume = {117},
abstract = {Traditional theories claim that center of pressure (COP) is oscillating to minimize the center of mass (COM) movements, contrary to exploratory theories which propose that COP oscillates to increase sensory information flow from the environment. The aim of this work was to better understand the underlying postural control mechanisms, specifically the interplay of COP oscillations and sensory information flow on keeping the COM stable. Eighteen volunteers took part of the experiment divided into three parts based on sensory conditions: eyes opened, eyes closed and eyes closed with lightly touching a fixed object with one finger. Throughout each part the participants had to quietly stand for 335 s. In the middle of each part, we stabilized their COM for 105 s using a robotized waist-pull system. We recorded whole-body kinematics, COP oscillations, electromyographic activity of soleus and tibialis anterior muscles and the force applied by the finger during light touch conditions. The variability of COP significantly decreased when the COM was stabilized in all sensory conditions. The interaction between sensory condition and stabilization was also significant with different decline of COP variability between quiet standing and stabilization part in all three different sensory conditions. Ankle and knee angle variability decreased significantly while the hip angle variability did not. Our findings suggest that COP is not moving to explore the environment, but to attenuate oscillations of the COM. However, possible functional aspect of movement variability to keep the COM stable still remains.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Traditional theories claim that center of pressure (COP) is oscillating to minimize the center of mass (COM) movements, contrary to exploratory theories which propose that COP oscillates to increase sensory information flow from the environment. The aim of this work was to better understand the underlying postural control mechanisms, specifically the interplay of COP oscillations and sensory information flow on keeping the COM stable. Eighteen volunteers took part of the experiment divided into three parts based on sensory conditions: eyes opened, eyes closed and eyes closed with lightly touching a fixed object with one finger. Throughout each part the participants had to quietly stand for 335 s. In the middle of each part, we stabilized their COM for 105 s using a robotized waist-pull system. We recorded whole-body kinematics, COP oscillations, electromyographic activity of soleus and tibialis anterior muscles and the force applied by the finger during light touch conditions. The variability of COP significantly decreased when the COM was stabilized in all sensory conditions. The interaction between sensory condition and stabilization was also significant with different decline of COP variability between quiet standing and stabilization part in all three different sensory conditions. Ankle and knee angle variability decreased significantly while the hip angle variability did not. Our findings suggest that COP is not moving to explore the environment, but to attenuate oscillations of the COM. However, possible functional aspect of movement variability to keep the COM stable still remains.
2020
Forman, Davis A; Forman, Garrick N; Avila-Mireles, Edwin Johnatan; Mugnosso, Maddalena; Zenzeri, Jacopo; Murphy, Bernadette; Holmes, Michael W R
Characterizing forearm muscle activity in university-aged males during dynamic radial-ulnar deviation of the wrist using a wrist robot Journal Article
In: Journal of Biomechanics, vol. 108, pp. 109897, 2020, ISSN: 18732380.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020b,
title = {Characterizing forearm muscle activity in university-aged males during dynamic radial-ulnar deviation of the wrist using a wrist robot},
author = {Davis A Forman and Garrick N Forman and Edwin Johnatan Avila-Mireles and Maddalena Mugnosso and Jacopo Zenzeri and Bernadette Murphy and Michael W R Holmes},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020303201},
doi = {10.1016/j.jbiomech.2020.109897},
issn = {18732380},
year = {2020},
date = {2020-07-01},
journal = {Journal of Biomechanics},
volume = {108},
pages = {109897},
abstract = {Functioning as wrist stabilizers, the wrist extensor muscles exhibit higher levels of muscle activity than the flexors in most distal upper-limb tasks. However, this finding has been derived mostly from isometric or wrist flexion-extension protocols, with little consideration for wrist dynamics or radial-ulnar wrist deviations. The purpose of this study was to assess forearm muscle activity during the execution of dynamic wrist radial-ulnar deviation in various forearm orientations (pronation/supination). In 12 healthy university-aged males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic radial-ulnar deviation using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a radial or ulnar direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture influenced the muscles acting upon the hand (FDS/ED), whereas movement phase (concentric-eccentric) and torque direction influenced nearly every muscle. The ECR demonstrated the greatest task-dependency of all forearm muscles, which is possibly reflective of forearm muscle lines of action. Co-contraction ratios were much higher in radial trials than ulnar (Radial: 1.20 ± 0.78, Ulnar: 0.28 ± 0.18, P textless 0.05), suggesting greater FCU and ECU contribution to wrist joint stability in radial-ulnar movement. These findings highlight a greater complexity of wrist extensor function than has previously been reported in isometric work.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Functioning as wrist stabilizers, the wrist extensor muscles exhibit higher levels of muscle activity than the flexors in most distal upper-limb tasks. However, this finding has been derived mostly from isometric or wrist flexion-extension protocols, with little consideration for wrist dynamics or radial-ulnar wrist deviations. The purpose of this study was to assess forearm muscle activity during the execution of dynamic wrist radial-ulnar deviation in various forearm orientations (pronation/supination). In 12 healthy university-aged males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic radial-ulnar deviation using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a radial or ulnar direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture influenced the muscles acting upon the hand (FDS/ED), whereas movement phase (concentric-eccentric) and torque direction influenced nearly every muscle. The ECR demonstrated the greatest task-dependency of all forearm muscles, which is possibly reflective of forearm muscle lines of action. Co-contraction ratios were much higher in radial trials than ulnar (Radial: 1.20 ± 0.78, Ulnar: 0.28 ± 0.18, P textless 0.05), suggesting greater FCU and ECU contribution to wrist joint stability in radial-ulnar movement. These findings highlight a greater complexity of wrist extensor function than has previously been reported in isometric work.
Koopman, Axel S; Naf, Matthias; Baltrusch, Saskia J; Kingma, Idsart; Rodriguez-Guerrero, Carlos; Babič, Jan; de Looze, Michiel P; van Dieen, Jaap H
Biomechanical evaluation of a new passive back support exoskeleton Journal Article
In: Journal of Biomechanics, vol. 105, pp. 109795, 2020, ISSN: 00219290.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Koopman2020,
title = {Biomechanical evaluation of a new passive back support exoskeleton},
author = {Axel S Koopman and Matthias Naf and Saskia J Baltrusch and Idsart Kingma and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Michiel P de Looze and Jaap H van Dieen},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020302153},
doi = {10.1016/j.jbiomech.2020.109795},
issn = {00219290},
year = {2020},
date = {2020-05-01},
urldate = {2020-05-01},
journal = {Journal of Biomechanics},
volume = {105},
pages = {109795},
abstract = {The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13\textendash21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13–21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.

Forman, Davis A; Forman, Garrick N; Avila-Mireles, Edwin Johnatan; Mugnosso, Maddalena; Zenzeri, Jacopo; Murphy, Bernadette; Holmes, Michael W R
Characterizing forearm muscle activity in young adults during dynamic wrist flexion–extension movement using a wrist robot Journal Article
In: Journal of Biomechanics, vol. 108, pp. 109908, 2020, ISSN: 18732380.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020,
title = {Characterizing forearm muscle activity in young adults during dynamic wrist flexion\textendashextension movement using a wrist robot},
author = {Davis A Forman and Garrick N Forman and Edwin Johnatan Avila-Mireles and Maddalena Mugnosso and Jacopo Zenzeri and Bernadette Murphy and Michael W R Holmes},
url = {https://doi.org/10.1016/j.jbiomech.2020.109908},
doi = {10.1016/j.jbiomech.2020.109908},
issn = {18732380},
year = {2020},
date = {2020-01-01},
journal = {Journal of Biomechanics},
volume = {108},
pages = {109908},
publisher = {Elsevier Ltd},
abstract = {Current research suggests that the wrist extensor muscles function as the primary stabilizers of the wrist-joint complex. However, most investigations have utilized isometric study designs, with little consideration for wrist dynamics or changes in posture. The purpose of the present study was to assess forearm muscle activity during the execution of dynamic wrist flexion/extension in multiple forearm orientations (pronation/supination). In 12 young adult males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic wrist flexion/extension using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a flexion or extension direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture had minimal influence on forearm muscle activity, but significantly altered the activity of the biceps and triceps brachii. Movement phase (concentric-eccentric) dictated muscle activity in every muscle. Interestingly, muscle activity in the eccentric phase was equal between the two applied handle torques, regardless of whether the muscle acted as the agonist or antagonist. Co-contraction ratios were higher in the flexion conditions (flexion: 2.28 ± 2.04, extension: 0.32 ± 0.27), suggesting significantly greater wrist extensor activity\textendashlikely a contribution to wrist joint stability. This highlights the vulnerability of the wrist extensor muscles to overuse injuries in settings requiring prolonged use of dynamic wrist exertions.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Current research suggests that the wrist extensor muscles function as the primary stabilizers of the wrist-joint complex. However, most investigations have utilized isometric study designs, with little consideration for wrist dynamics or changes in posture. The purpose of the present study was to assess forearm muscle activity during the execution of dynamic wrist flexion/extension in multiple forearm orientations (pronation/supination). In 12 young adult males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic wrist flexion/extension using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a flexion or extension direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture had minimal influence on forearm muscle activity, but significantly altered the activity of the biceps and triceps brachii. Movement phase (concentric-eccentric) dictated muscle activity in every muscle. Interestingly, muscle activity in the eccentric phase was equal between the two applied handle torques, regardless of whether the muscle acted as the agonist or antagonist. Co-contraction ratios were higher in the flexion conditions (flexion: 2.28 ± 2.04, extension: 0.32 ± 0.27), suggesting significantly greater wrist extensor activity–likely a contribution to wrist joint stability. This highlights the vulnerability of the wrist extensor muscles to overuse injuries in settings requiring prolonged use of dynamic wrist exertions.
Forman, Garrick N; Forman, Davis A; Avila-Mireles, Edwin Johnatan; Zenzeri, Jacopo; Holmes, Michael W R
Investigating the Muscular and Kinematic Responses to Sudden Wrist Perturbations During a Dynamic Tracking Task Journal Article
In: Scientific Reports, vol. 10, no. 1, pp. 1-13, 2020, ISSN: 20452322.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020a,
title = {Investigating the Muscular and Kinematic Responses to Sudden Wrist Perturbations During a Dynamic Tracking Task},
author = {Garrick N Forman and Davis A Forman and Edwin Johnatan Avila-Mireles and Jacopo Zenzeri and Michael W R Holmes},
url = {http://dx.doi.org/10.1038/s41598-020-61117-9},
doi = {10.1038/s41598-020-61117-9},
issn = {20452322},
year = {2020},
date = {2020-01-01},
journal = {Scientific Reports},
volume = {10},
number = {1},
pages = {1-13},
publisher = {Springer US},
abstract = {Sudden disturbances (perturbations) to the hand and wrist are commonplace in daily activities and workplaces when interacting with tools and the environment. It is important to understand how perturbations influence forearm musculature and task performance when identifying injury mechanisms. The purpose of this work was to evaluate changes in forearm muscle activity and co-contraction caused by wrist perturbations during a dynamic wrist tracking task. Surface electromyography was recorded from eight muscles of the upper-limb. Participants performed trials consisting of 17 repetitions of ±40° of wrist flexion/extension using a robotic device. During trials, participants received radial or ulnar perturbations that were delivered during flexion or extension, and with known or unknown timing. Co-contraction ratios for all muscle pairs showed significantly greater extensor activity across all experimental conditions. Of all antagonistic muscle pairs, the flexor carpi radialis (FCR)-extensor carpi radialis (ECR) muscle pair had the greatest change in co-contraction, producing 1602% greater co-contraction during flexion trials than during extensions trials. Expected perturbations produced greater anticipatory (immediately prior to the perturbation) muscle activity than unexpected, resulting in a 30% decrease in wrist displacement. While improving performance, this increase in anticipatory muscle activity may leave muscles susceptible to early-onset fatigue, which could lead to chronic overuse injuries in the workplace.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Sudden disturbances (perturbations) to the hand and wrist are commonplace in daily activities and workplaces when interacting with tools and the environment. It is important to understand how perturbations influence forearm musculature and task performance when identifying injury mechanisms. The purpose of this work was to evaluate changes in forearm muscle activity and co-contraction caused by wrist perturbations during a dynamic wrist tracking task. Surface electromyography was recorded from eight muscles of the upper-limb. Participants performed trials consisting of 17 repetitions of ±40° of wrist flexion/extension using a robotic device. During trials, participants received radial or ulnar perturbations that were delivered during flexion or extension, and with known or unknown timing. Co-contraction ratios for all muscle pairs showed significantly greater extensor activity across all experimental conditions. Of all antagonistic muscle pairs, the flexor carpi radialis (FCR)-extensor carpi radialis (ECR) muscle pair had the greatest change in co-contraction, producing 1602% greater co-contraction during flexion trials than during extensions trials. Expected perturbations produced greater anticipatory (immediately prior to the perturbation) muscle activity than unexpected, resulting in a 30% decrease in wrist displacement. While improving performance, this increase in anticipatory muscle activity may leave muscles susceptible to early-onset fatigue, which could lead to chronic overuse injuries in the workplace.

Galli, G.; Cakmak, Y. O.; Babič, Jan; Pazzaglia, M.
Editorial: Embodying Tool Use: From Cognition to Neurorehabilitation Journal Article
In: Frontiers in Human Neuroscience, vol. 14, 2020, ISSN: 16625161.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Galli2020,
title = {Editorial: Embodying Tool Use: From Cognition to Neurorehabilitation},
author = {G. Galli and Y. O. Cakmak and Jan Babi\v{c} and M. Pazzaglia},
doi = {10.3389/fnhum.2020.585670},
issn = {16625161},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {14},
abstract = {This Research Topic collects an impressive body ofliterature on “Embodying Tool Use.” Overall, the contributions extend and enrich the previous multidisciplinary approach and translational applications. However, despite the significant progress made in our understanding and the real-world relevance, there are boundless directions, endless possibilities, and exciting challenges yet to be explored in future research.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
This Research Topic collects an impressive body ofliterature on “Embodying Tool Use.” Overall, the contributions extend and enrich the previous multidisciplinary approach and translational applications. However, despite the significant progress made in our understanding and the real-world relevance, there are boundless directions, endless possibilities, and exciting challenges yet to be explored in future research.
Čamernik, Jernej; Kezić, Sanja; Babič, Jan
Impact of the virtual-height exposure on human psychophysical parameters Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 87, no. 5, pp. 267–274, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Camernik2020,
title = {Impact of the virtual-height exposure on human psychophysical parameters},
author = {Jernej \v{C}amernik and Sanja Kezi\'{c} and Jan Babi\v{c}},
url = {https://ev.fe.uni-lj.si/5-2020/Camernik.pdf},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {87},
number = {5},
pages = {267--274},
abstract = {The study evaluates the impact of the virtual height on the human postural control by analyzing the human physiological and psychological responses. Combining the virtual reality and a robotic platform, an environment is created in which a human is seemingly raised to a height of three meters, to affect the human's multi-sensory perception of a movement in the space, causing or enhancing the human's psychophysical responses to an environment at change. A short test is made to monitor the postural control of 20 volunteers during an event of a simultaneous sudden jerk of a robotic platform and a visual change in the height. The data are recorded before and after the event and the results are compared. Using force-plates and an optical system for capturing the volunteer's movement, the movements of forces on the ground and the volunteer's body mass (COP and COM) are observed. Their average values, average power spectrum frequency (MPF) and the root mean square values (RMS) are analyzed. Before and after a virtual rise, the state of the volunteer's current and general perception of anxiety is evaluated with a questionnaire to determine their level of anxiety, electrodermal activity (EDA) and skinsurface temperature. It is shown, that immediately after the volunteer's exposure to a virtual height, their anxiety, fear, skin conductivity and average frequency spectrum of the COP and COM movement increase and their stability, confidence, temperature and RMS values of COP and COM decrease. The volunteer's physiological response to their height perception is also reflected in the change in the mean values of the COP and COM movement in the anterior-posterior direction after they lean backwards, i.e. away from the edge, immediately after lifting. Our study results show that changes in the human emotional and physiological state, as a consequence of a postural threat, and simultaneously also an increase in the human postural control, occur even in humans who are not afraid of the height.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The study evaluates the impact of the virtual height on the human postural control by analyzing the human physiological and psychological responses. Combining the virtual reality and a robotic platform, an environment is created in which a human is seemingly raised to a height of three meters, to affect the human's multi-sensory perception of a movement in the space, causing or enhancing the human's psychophysical responses to an environment at change. A short test is made to monitor the postural control of 20 volunteers during an event of a simultaneous sudden jerk of a robotic platform and a visual change in the height. The data are recorded before and after the event and the results are compared. Using force-plates and an optical system for capturing the volunteer's movement, the movements of forces on the ground and the volunteer's body mass (COP and COM) are observed. Their average values, average power spectrum frequency (MPF) and the root mean square values (RMS) are analyzed. Before and after a virtual rise, the state of the volunteer's current and general perception of anxiety is evaluated with a questionnaire to determine their level of anxiety, electrodermal activity (EDA) and skinsurface temperature. It is shown, that immediately after the volunteer's exposure to a virtual height, their anxiety, fear, skin conductivity and average frequency spectrum of the COP and COM movement increase and their stability, confidence, temperature and RMS values of COP and COM decrease. The volunteer's physiological response to their height perception is also reflected in the change in the mean values of the COP and COM movement in the anterior-posterior direction after they lean backwards, i.e. away from the edge, immediately after lifting. Our study results show that changes in the human emotional and physiological state, as a consequence of a postural threat, and simultaneously also an increase in the human postural control, occur even in humans who are not afraid of the height.
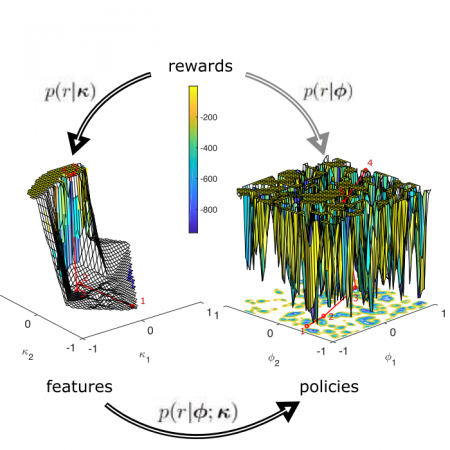
Rottmann, Nils; Kunavar, Tjaša; Babič, Jan; Peters, Jan; Rueckert, Elmar
Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article
In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5490–5496, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Postural Balance | Links:
@inproceedings{9341335,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {Nils Rottmann and Tja\v{s}a Kunavar and Jan Babi\v{c} and Jan Peters and Elmar Rueckert},
doi = {10.1109/IROS45743.2020.9341335},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {5490--5496},
abstract = {Learning control policies in robotic tasks requires a large number of interactions due to small learning rates, bounds on the updates or unknown constraints. In contrast humans can infer protective and safe solutions after a single failure or unexpected observation. In order to reach similar performance, we developed a hierarchical Bayesian optimization algorithm that replicates the cognitive inference and memorization process for avoiding failures in motor control tasks. A Gaussian Process implements the modeling and the sampling of the acquisition function. This enables rapid learning with large learning rates while a mental replay phase ensures that policy regions that led to failures are inhibited during the sampling process. The features of the hierarchical Bayesian optimization method are evaluated in a simulated and physiological humanoid postural balancing task. The method out- performs standard optimization techniques, such as Bayesian Optimization, in the number of interactions to solve the task, in the computational demands and in the frequency of observed failures. Further, we show that our method performs similar to humans for learning the postural balancing task by comparing our simulation results with real human data.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Learning control policies in robotic tasks requires a large number of interactions due to small learning rates, bounds on the updates or unknown constraints. In contrast humans can infer protective and safe solutions after a single failure or unexpected observation. In order to reach similar performance, we developed a hierarchical Bayesian optimization algorithm that replicates the cognitive inference and memorization process for avoiding failures in motor control tasks. A Gaussian Process implements the modeling and the sampling of the acquisition function. This enables rapid learning with large learning rates while a mental replay phase ensures that policy regions that led to failures are inhibited during the sampling process. The features of the hierarchical Bayesian optimization method are evaluated in a simulated and physiological humanoid postural balancing task. The method out- performs standard optimization techniques, such as Bayesian Optimization, in the number of interactions to solve the task, in the computational demands and in the frequency of observed failures. Further, we show that our method performs similar to humans for learning the postural balancing task by comparing our simulation results with real human data.
2019

White, Olivier; Babič, Jan; Trenado, Carlos; Johannsen, Leif; Goswami, Nandu
The Promise of Stochastic Resonance in Falls Prevention Journal Article
In: Frontiers in Physiology, vol. 9, no. January, pp. 1–12, 2019, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning | Links:
@article{White2019,
title = {The Promise of Stochastic Resonance in Falls Prevention},
author = {Olivier White and Jan Babi\v{c} and Carlos Trenado and Leif Johannsen and Nandu Goswami},
url = {https://www.frontiersin.org/article/10.3389/fphys.2018.01865/full},
doi = {10.3389/fphys.2018.01865},
issn = {1664-042X},
year = {2019},
date = {2019-01-01},
journal = {Frontiers in Physiology},
volume = {9},
number = {January},
pages = {1--12},
abstract = {Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.
Avila-Mireles, Edwin Johnatan; Abidi, Haider; D'Imperio, Mariapaola; Scaccia, Massimiliano; Liberini, Paolo; Caldwell, Darwin G.; Cannella, Ferdinando
Study of Patients Self-Training Influence on Peripheral Neuropathies Diseases Diagnosis through D.I.T.A Device Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, pp. 5435-5438, 2019, ISSN: 1557170X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Avila-Mireles2019,
title = {Study of Patients Self-Training Influence on Peripheral Neuropathies Diseases Diagnosis through D.I.T.A Device},
author = {Edwin Johnatan Avila-Mireles and Haider Abidi and Mariapaola D'Imperio and Massimiliano Scaccia and Paolo Liberini and Darwin G. Caldwell and Ferdinando Cannella},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=8856599},
doi = {10.1109/EMBC.2019.8856599},
issn = {1557170X},
year = {2019},
date = {2019-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
pages = {5435-5438},
publisher = {IEEE},
abstract = {In our daily life, the sight and the sense of touch play a fundamental role in objects recognitions. This process is helped by the experience: if a subject has already seen or already touched an object in the past, he will recognize it more easily in the future. Following this assumption, the authors of this paper wanted to investigate if the experience can influence the results of a clinical examination where the subject has an active role. The attention was focused on the peripheral neuropathies diagnosis since they require an accurate assessment of several parameters including the tactile sensitivity trend. In other words, if the tests encompass an active role of the subjects, one of the main uncertainties is the self-training that influences the subject responses. This work focuses on the study of this self-training using the D.I.T.A device (Dynamic Investigation Test-rig on hAptics). Results clearly show a fundamental role of priming during 'haptic modality': expert subjects, previously experienced with the tests, demonstrated better recognition of the encountered stimuli, compared to novices. Moreover, the results show that the maximum difference between the two groups of subjects is in the first part of the test. An ANOVA analysis was carried out to demonstrate that also the errors between the pins-arrays are affected by the priming.},
keywords = {Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In our daily life, the sight and the sense of touch play a fundamental role in objects recognitions. This process is helped by the experience: if a subject has already seen or already touched an object in the past, he will recognize it more easily in the future. Following this assumption, the authors of this paper wanted to investigate if the experience can influence the results of a clinical examination where the subject has an active role. The attention was focused on the peripheral neuropathies diagnosis since they require an accurate assessment of several parameters including the tactile sensitivity trend. In other words, if the tests encompass an active role of the subjects, one of the main uncertainties is the self-training that influences the subject responses. This work focuses on the study of this self-training using the D.I.T.A device (Dynamic Investigation Test-rig on hAptics). Results clearly show a fundamental role of priming during 'haptic modality': expert subjects, previously experienced with the tests, demonstrated better recognition of the encountered stimuli, compared to novices. Moreover, the results show that the maximum difference between the two groups of subjects is in the first part of the test. An ANOVA analysis was carried out to demonstrate that also the errors between the pins-arrays are affected by the priming.

Šarabon, Nejc; Kozinc, Žiga; Babič, Jan; Marković, Goran
Effect of rowing ergometer compliance on biomechanical and physiological indicators during simulated 2,000-metre race Journal Article
In: Journal of Sports Science and Medicine, vol. 18, pp. 264–270, 2019.
Abstract | BibTeX | Tags: Ergonomy, Neuromusculoskeletal Modelling, Sport
@article{Sarabon2019,
title = {Effect of rowing ergometer compliance on biomechanical and physiological indicators during simulated 2,000-metre race},
author = {Nejc \v{S}arabon and \v{Z}iga Kozinc and Jan Babi\v{c} and Goran Markovi\'{c}},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
journal = {Journal of Sports Science and Medicine},
volume = {18},
pages = {264--270},
abstract = {This study compared biomechanical characteristics and physiological responses during rowing on three devices: (i) stable ergometer (STE), (ii) transversally compliant ergometer (TCE) and (iii) frontally compliant ergometer (FCE). Eleven young competitive rowers completed a 2000 meter simulated race under each of the ergometer conditions in a randomized order. Stroke rate, average force, power output, velocity and amplitude of the handle and stretcher or seat, heart rate and blood lactate were measured at 500 m intervals. Force and power at the stretcher were significantly lower (p \< 0.03) for TCE, while stroke rate and velocities of the handle and the seat were higher (p \< 0.01). No significant differences were observed between STE and FCE in biomechanical parameters. The lowest rowing performance was observed in FCE (p = 0.007), and was accompanied with the highest average heart rate (p = 0.031). Our findings indicate that in TCE, rowers modified their technique, but were able to maintain physiological strain and performance. In contrast, FCE had no effect on rowing biomechanics, but decreased rowing performance and increased physiological strain. It seems plausible that transversal, but not frontal compliance, elicited a biomechanical technique that might reduce the discrepancy between a rowing ergometer and on-water rowing.},
keywords = {Ergonomy, Neuromusculoskeletal Modelling, Sport},
pubstate = {published},
tppubtype = {article}
}
This study compared biomechanical characteristics and physiological responses during rowing on three devices: (i) stable ergometer (STE), (ii) transversally compliant ergometer (TCE) and (iii) frontally compliant ergometer (FCE). Eleven young competitive rowers completed a 2000 meter simulated race under each of the ergometer conditions in a randomized order. Stroke rate, average force, power output, velocity and amplitude of the handle and stretcher or seat, heart rate and blood lactate were measured at 500 m intervals. Force and power at the stretcher were significantly lower (p < 0.03) for TCE, while stroke rate and velocities of the handle and the seat were higher (p < 0.01). No significant differences were observed between STE and FCE in biomechanical parameters. The lowest rowing performance was observed in FCE (p = 0.007), and was accompanied with the highest average heart rate (p = 0.031). Our findings indicate that in TCE, rowers modified their technique, but were able to maintain physiological strain and performance. In contrast, FCE had no effect on rowing biomechanics, but decreased rowing performance and increased physiological strain. It seems plausible that transversal, but not frontal compliance, elicited a biomechanical technique that might reduce the discrepancy between a rowing ergometer and on-water rowing.
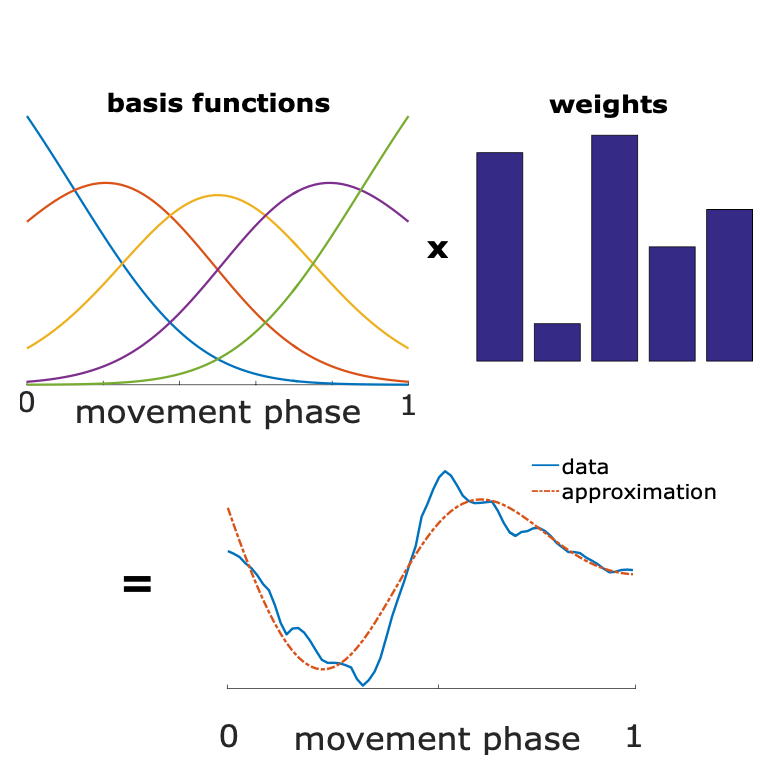
Bobek, Urban; Rueckert, Elmar; Jamšek, Marko; Barišić, Saša; Babič, Jan
Combining Foot Placement Prediction with Obstacle Detection to Detect Tripping Proceedings Article
In: Žemva, Andrej; Trost, Andrej (Ed.): Proceedings of the Twenty-eighth Electrotechnical and Computer Science Conference ERK 2019, pp. 110–113, Portorož, Slovenia, 2019, ISSN: 2591-0442.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling | Links:
@inproceedings{Bobek2019,
title = {Combining Foot Placement Prediction with Obstacle Detection to Detect Tripping},
author = {Urban Bobek and Elmar Rueckert and Marko Jam\v{s}ek and Sa\v{s}a Bari\v{s}i\'{c} and Jan Babi\v{c}},
editor = {Andrej \v{Z}emva and Andrej Trost},
url = {https://erk.fe.uni-lj.si/2019/program},
issn = {2591-0442},
year = {2019},
date = {2019-01-01},
booktitle = {Proceedings of the Twenty-eighth Electrotechnical and Computer Science Conference ERK 2019},
pages = {110--113},
address = {Portoro\v{z}, Slovenia},
abstract = {Tripping is a major cause of fall related injuries, especialy among the elderly population. Some research has been done on the mechanics of tripping and strategies to gain balance afterwards. But what if you could detect a potential trip in advance and possibly prevent it? We pro- pose a system that involves detecting obstacles in front of the user and a method to predict whether they will hit it.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
Tripping is a major cause of fall related injuries, especialy among the elderly population. Some research has been done on the mechanics of tripping and strategies to gain balance afterwards. But what if you could detect a potential trip in advance and possibly prevent it? We pro- pose a system that involves detecting obstacles in front of the user and a method to predict whether they will hit it.
2018
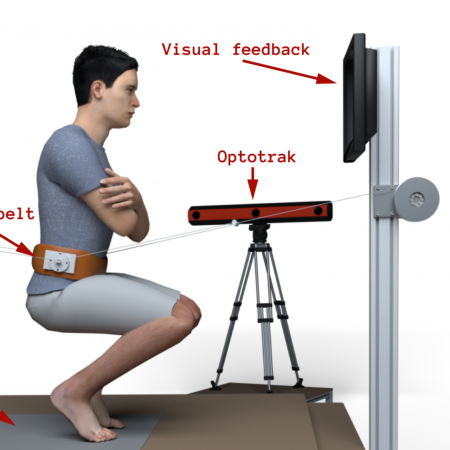
Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Understanding Human Adaptation in Squat-to-Stand movements Proceedings Article
In: 2018 Türkiye Robotbilim Konferansi, TORK 2018, pp. 245–247, Istanbul, 2018.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning
@inproceedings{Camernik2018,
title = {Understanding Human Adaptation in Squat-to-Stand movements},
author = {Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2018},
date = {2018-01-01},
booktitle = {2018 T\"{u}rkiye Robotbilim Konferansi, TORK 2018},
pages = {245--247},
address = {Istanbul},
abstract = {We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.
2017
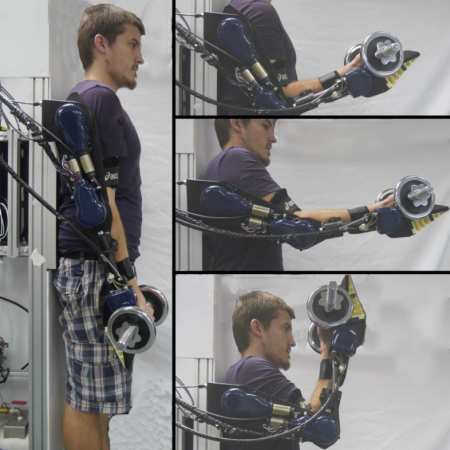
Goljat, Rok; Babič, Jan; Petrič, Tadej; Peternel, Luka; Morimoto, Jun
Power-augmentation control approach for arm exoskeleton based on human muscular manipulability Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 5929–5934, IEEE, 2017, ISSN: 10504729.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Goljat2017,
title = {Power-augmentation control approach for arm exoskeleton based on human muscular manipulability},
author = {Rok Goljat and Jan Babi\v{c} and Tadej Petri\v{c} and Luka Peternel and Jun Morimoto},
url = {https://ieeexplore.ieee.org/document/7989698/},
doi = {10.1109/ICRA.2017.7989698},
issn = {10504729},
year = {2017},
date = {2017-05-01},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {5929--5934},
publisher = {IEEE},
abstract = {The paper presents a novel control method for the arm exoskeletons that takes into account the muscular force manipulability of the human arm. In contrast to classical controllers that provide assistance without considering the biomechanical properties of the human arm, we propose a control method that takes into account the configuration of the arm and the direction of the motion to effectively compensate the anisotropic property of the muscular manipulability of the human arm. Consequently, the proposed control method effectively maintains a spherical endpoint manipulability in the entire workspace of the arm. As a result, the proposed method allows the human using the exoskeleton to efficiently perform tasks in arm configurations that are normally unsuitable due to the low manipulability. We evaluated the proposed approach by a preliminary experimental study where a subject wearing a 2 DOF arm-exoskeleton had to move a 4 kg weight between several locations. The results of our study demonstrate that the proposed approach effectively augments the ability of human motor control to perform tasks equally well in the whole arm workspace that include configurations with low intrinsic manipulability.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper presents a novel control method for the arm exoskeletons that takes into account the muscular force manipulability of the human arm. In contrast to classical controllers that provide assistance without considering the biomechanical properties of the human arm, we propose a control method that takes into account the configuration of the arm and the direction of the motion to effectively compensate the anisotropic property of the muscular manipulability of the human arm. Consequently, the proposed control method effectively maintains a spherical endpoint manipulability in the entire workspace of the arm. As a result, the proposed method allows the human using the exoskeleton to efficiently perform tasks in arm configurations that are normally unsuitable due to the low manipulability. We evaluated the proposed approach by a preliminary experimental study where a subject wearing a 2 DOF arm-exoskeleton had to move a 4 kg weight between several locations. The results of our study demonstrate that the proposed approach effectively augments the ability of human motor control to perform tasks equally well in the whole arm workspace that include configurations with low intrinsic manipulability.
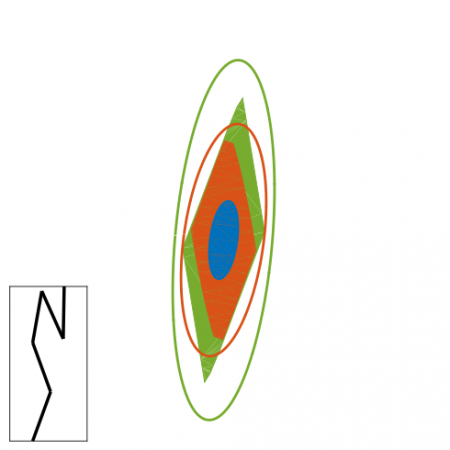
Azad, Morteza; Babič, Jan; Mistry, Michael
Dynamic manipulability of the center of mass: A tool to study, analyse and measure physical ability of robots Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 3484–3490, IEEE, 2017, ISBN: 978-1-5090-4633-1.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2017,
title = {Dynamic manipulability of the center of mass: A tool to study, analyse and measure physical ability of robots},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {https://ieeexplore.ieee.org/document/7989398/},
doi = {10.1109/ICRA.2017.7989398},
isbn = {978-1-5090-4633-1},
year = {2017},
date = {2017-05-01},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {3484--3490},
publisher = {IEEE},
abstract = {This paper introduces dynamic manipulability of the center of mass (CoM) as a metric to measure robots' phys- ical abilities to accelerate their CoMs in different directions. By decomposing the effects of velocity dependent constraints, such as unilateral contacts and friction cones, CoM dynamic manipulability is defined as a velocity independent metric which depends only on robot's configuration and inertial parameters. Thus, this metric is independent of any choice of controller and expresses only physical abilities of robots. This important property makes the proposed metric a proper tool to study, analyse and design current and future robots. The outcome of the CoM dynamic manipulability analysis in this paper is an ellipsoid in the CoM acceleration space which graphically shows accessible points due to the unit weighted norm of joint torques. Physical meanings and concepts of two reasonable choices for the weighting matrix, which is used in the weighted norm of joint torques, are discussed and illustrative examples are presented. Since the proposed metric measures physical ability to accelerate the CoM, it is claimed to be a suitable tool to study balance ability of legged robots.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper introduces dynamic manipulability of the center of mass (CoM) as a metric to measure robots' phys- ical abilities to accelerate their CoMs in different directions. By decomposing the effects of velocity dependent constraints, such as unilateral contacts and friction cones, CoM dynamic manipulability is defined as a velocity independent metric which depends only on robot's configuration and inertial parameters. Thus, this metric is independent of any choice of controller and expresses only physical abilities of robots. This important property makes the proposed metric a proper tool to study, analyse and design current and future robots. The outcome of the CoM dynamic manipulability analysis in this paper is an ellipsoid in the CoM acceleration space which graphically shows accessible points due to the unit weighted norm of joint torques. Physical meanings and concepts of two reasonable choices for the weighting matrix, which is used in the weighted norm of joint torques, are discussed and illustrative examples are presented. Since the proposed metric measures physical ability to accelerate the CoM, it is claimed to be a suitable tool to study balance ability of legged robots.
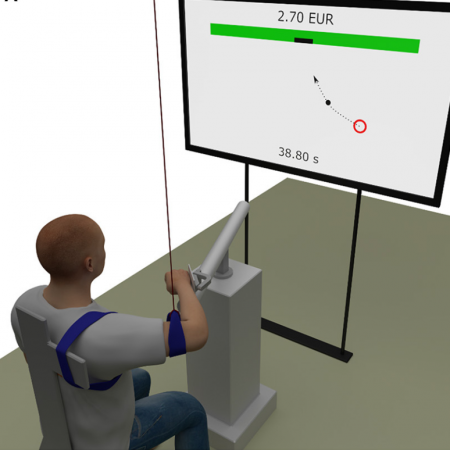
Peternel, Luka; Sigaud, Olivier; Babič, Jan
Unifying Speed-Accuracy Trade-Off and Cost-Benefit Trade-Off in Human Reaching Movements Journal Article
In: Frontiers in Human Neuroscience, vol. 11, pp. 615, 2017, ISSN: 1662-5161.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control | Links:
@article{Peternel2017b,
title = {Unifying Speed-Accuracy Trade-Off and Cost-Benefit Trade-Off in Human Reaching Movements},
author = {Luka Peternel and Olivier Sigaud and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fnhum.2017.00615/full},
doi = {10.3389/fnhum.2017.00615},
issn = {1662-5161},
year = {2017},
date = {2017-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {11},
pages = {615},
abstract = {Two basic trade-offs interact while our brain decides how to move our body. First, with the cost-benefit trade-off, the brain trades between the importance of moving faster toward a target that is more rewarding and the increased muscular cost resulting from a faster movement. Second, with the speed-accuracy trade-off, the brain trades between how accurate the movement needs to be and the time it takes to achieve such accuracy. So far, these two trade-offs have been well studied in isolation, despite their obvious interdependence. To overcome this limitation, we propose a new model that is able to simultaneously account for both trade-offs. The model assumes that the central nervous system maximizes the expected utility resulting from the potential reward and the cost over the repetition of many movements, taking into account the probability to miss the target. The resulting model is able to account for both the speed-accuracy and the cost-benefit trade-offs. To validate the proposed hypothesis, we confront the properties of the computational model to data from an experimental study where subjects have to reach for targets by performing arm movements in a horizontal plane. The results qualitatively show that the proposed model successfully accounts for both cost-benefit and speed-accuracy trade-offs.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Two basic trade-offs interact while our brain decides how to move our body. First, with the cost-benefit trade-off, the brain trades between the importance of moving faster toward a target that is more rewarding and the increased muscular cost resulting from a faster movement. Second, with the speed-accuracy trade-off, the brain trades between how accurate the movement needs to be and the time it takes to achieve such accuracy. So far, these two trade-offs have been well studied in isolation, despite their obvious interdependence. To overcome this limitation, we propose a new model that is able to simultaneously account for both trade-offs. The model assumes that the central nervous system maximizes the expected utility resulting from the potential reward and the cost over the repetition of many movements, taking into account the probability to miss the target. The resulting model is able to account for both the speed-accuracy and the cost-benefit trade-offs. To validate the proposed hypothesis, we confront the properties of the computational model to data from an experimental study where subjects have to reach for targets by performing arm movements in a horizontal plane. The results qualitatively show that the proposed model successfully accounts for both cost-benefit and speed-accuracy trade-offs.
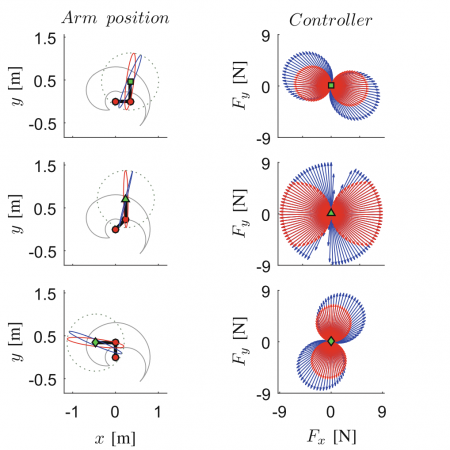
Goljat, Rok; Petrič, Tadej; Babič, Jan
Upper Limb Exoskeleton Control for Isotropic Sensitivity of Human Arm Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, vol. 16, pp. 433–437, Springer International Publishing, 2017, ISBN: 978-3-319-46531-9.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@incollection{Goljat2017a,
title = {Upper Limb Exoskeleton Control for Isotropic Sensitivity of Human Arm},
author = {Rok Goljat and Tadej Petri\v{c} and Jan Babi\v{c}},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_71},
doi = {10.1007/978-3-319-46532-6_71},
isbn = {978-3-319-46531-9},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
volume = {16},
pages = {433--437},
publisher = {Springer International Publishing},
abstract = {Most of today's assistive devices are controlled to provide uniform assis- tance irrespectively from the configuration of the human arm and the direction of the movement. We propose an innovative control method for arm exoskeletons that takes into account both of these parameters and compensates the anisotropic property of the force manipulability measure, intrinsic to the biomechanics of the human arm. To test our controller we designed a set of reaching tasks where the subjects had to carry two different loads to targets at five different locations and of two different sizes. Reaching times and trajectories were analysed for the evaluation of the controller. Through the analysis of the average reaching times we found that our method suc- cessfully enhances the motion while the analysis of the average maximal deviation from the ideal trajectories showed that our method does not induce any additional dynamic behaviour to the user.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {incollection}
}
Most of today's assistive devices are controlled to provide uniform assis- tance irrespectively from the configuration of the human arm and the direction of the movement. We propose an innovative control method for arm exoskeletons that takes into account both of these parameters and compensates the anisotropic property of the force manipulability measure, intrinsic to the biomechanics of the human arm. To test our controller we designed a set of reaching tasks where the subjects had to carry two different loads to targets at five different locations and of two different sizes. Reaching times and trajectories were analysed for the evaluation of the controller. Through the analysis of the average reaching times we found that our method suc- cessfully enhances the motion while the analysis of the average maximal deviation from the ideal trajectories showed that our method does not induce any additional dynamic behaviour to the user.
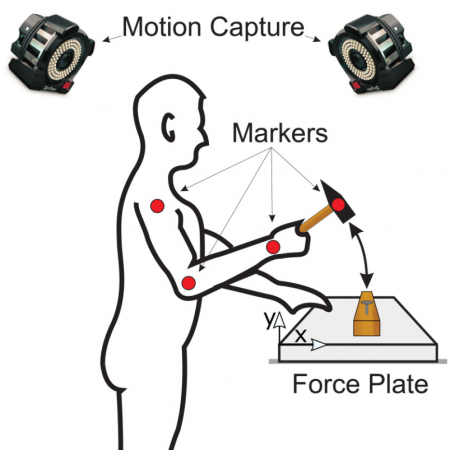
Petrič, Tadej; Simpson, Cole S; Ude, Aleš; Ijspeert, Auke J
Hammering Does Not Fit Fitts' Law Journal Article
In: Frontiers in Computational Neuroscience, vol. 11, no. May, pp. 1–12, 2017, ISSN: 1662-5188.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control | Links:
@article{Petric2017b,
title = {Hammering Does Not Fit Fitts' Law},
author = {Tadej Petri\v{c} and Cole S Simpson and Ale\v{s} Ude and Auke J Ijspeert},
url = {http://journal.frontiersin.org/article/10.3389/fncom.2017.00045/full},
doi = {10.3389/fncom.2017.00045},
issn = {1662-5188},
year = {2017},
date = {2017-01-01},
journal = {Frontiers in Computational Neuroscience},
volume = {11},
number = {May},
pages = {1--12},
abstract = {While movement is essential to human wellbeing, we are still unable to reproduce the deftness and robustness of human movement in automatons or completely restore function to individuals with many types of motor impairment. To better understand how the human nervous system plans and controls movements, neuromechanists employ simple tasks such as upper extremity reaches and isometric force tasks. However, these simple tasks rarely consider impacts and may not capture aspects of motor control that arise from real-world complexity. Here we compared existing models of motor control with the results of a periodic targeted impact task extended from Bernstein's seminal work: hammering a nail into wood. We recorded impact forces and kinematics from 10 subjects hammering at different frequencies and with hammers with different physical properties (mass and face area). We found few statistical differences in most measures between different types of hammer, demonstrating human robustness to minor changes in dynamics. Because human motor control is thought to obey optimality principles, we also developed a feedforward optimal simulation with a neuromechanically inspired cost function that reproduces the experimental data. However, Fitts' Law, which relates movement time to distance traveled and target size, did not match our experimental data. We therefore propose a new model in which the distance moved is a logarithmic function of the time to move that yields better results (R2 ≥ 0.99 compared to R2 ≥ 0.88). These results support the argument that humans control movement in an optimal way, but suggest that Fitts' Law may not generalize to periodic impact tasks.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
While movement is essential to human wellbeing, we are still unable to reproduce the deftness and robustness of human movement in automatons or completely restore function to individuals with many types of motor impairment. To better understand how the human nervous system plans and controls movements, neuromechanists employ simple tasks such as upper extremity reaches and isometric force tasks. However, these simple tasks rarely consider impacts and may not capture aspects of motor control that arise from real-world complexity. Here we compared existing models of motor control with the results of a periodic targeted impact task extended from Bernstein's seminal work: hammering a nail into wood. We recorded impact forces and kinematics from 10 subjects hammering at different frequencies and with hammers with different physical properties (mass and face area). We found few statistical differences in most measures between different types of hammer, demonstrating human robustness to minor changes in dynamics. Because human motor control is thought to obey optimality principles, we also developed a feedforward optimal simulation with a neuromechanically inspired cost function that reproduces the experimental data. However, Fitts' Law, which relates movement time to distance traveled and target size, did not match our experimental data. We therefore propose a new model in which the distance moved is a logarithmic function of the time to move that yields better results (R2 ≥ 0.99 compared to R2 ≥ 0.88). These results support the argument that humans control movement in an optimal way, but suggest that Fitts' Law may not generalize to periodic impact tasks.
2016
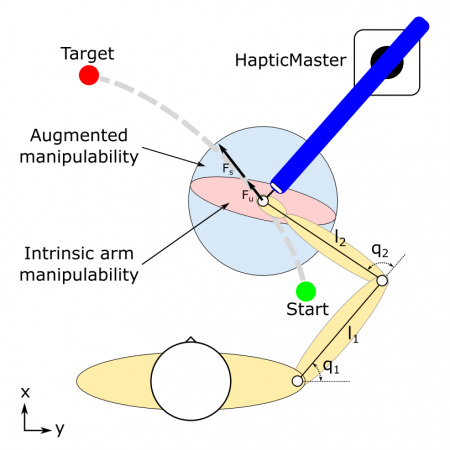
Petrič, Tadej; Goljat, Rok; Babič, Jan
Augmentation of human arm motor control by isotropic force manipulability Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 696–701, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Petric2016a,
title = {Augmentation of human arm motor control by isotropic force manipulability},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759128/},
doi = {10.1109/IROS.2016.7759128},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-10-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {696--701},
publisher = {IEEE},
address = {Daejeon},
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.
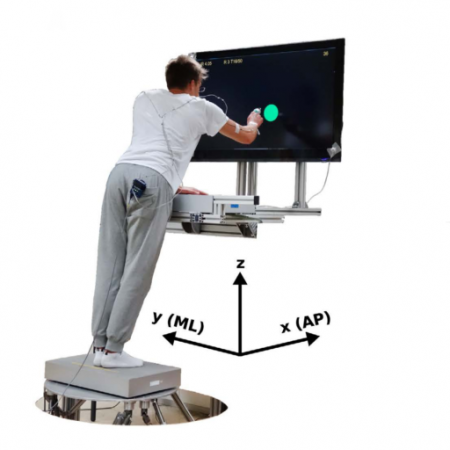
Rueckert, Elmar; Čamernik, Jernej; Peters, Jan; Babič, Jan
Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control Journal Article
In: Scientific Reports, vol. 6, no. 1, pp. 28455, 2016, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning | Links:
@article{Rueckert2016,
title = {Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control},
author = {Elmar Rueckert and Jernej \v{C}amernik and Jan Peters and Jan Babi\v{c}},
url = {http://www.nature.com/articles/srep28455},
doi = {10.1038/srep28455},
issn = {2045-2322},
year = {2016},
date = {2016-09-01},
journal = {Scientific Reports},
volume = {6},
number = {1},
pages = {28455},
publisher = {Nature Publishing Group},
abstract = {Human motor skill learning is driven by the necessity to adapt to new situations. While supportive contacts are essential for many tasks, little is known about their impact on motor learning. To study the effect of contacts an innovative full-body experimental paradigm was established. The task of the subjects was to reach for a distant target while postural stability could only be maintained by establishing an additional supportive hand contact. To examine adaptation, non-trivial postural perturbations of the subjects' support base were systematically introduced. A novel probabilistic trajectory model approach was employed to analyze the correlation between the motions of both arms and the trunk. We found that subjects adapted to the perturbations by establishing target dependent hand contacts. Moreover, we found that the trunk motion adapted significantly faster than the motion of the arms. However, the most striking finding was that observations of the initial phase of the left arm or trunk motion (100-400 ms) were sufficient to faithfully predict the complete movement of the right arm. Overall, our results suggest that the goal-directed arm movements determine the supportive arm motions and that the motion of heavy body parts adapts faster than the light arms.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Human motor skill learning is driven by the necessity to adapt to new situations. While supportive contacts are essential for many tasks, little is known about their impact on motor learning. To study the effect of contacts an innovative full-body experimental paradigm was established. The task of the subjects was to reach for a distant target while postural stability could only be maintained by establishing an additional supportive hand contact. To examine adaptation, non-trivial postural perturbations of the subjects' support base were systematically introduced. A novel probabilistic trajectory model approach was employed to analyze the correlation between the motions of both arms and the trunk. We found that subjects adapted to the perturbations by establishing target dependent hand contacts. Moreover, we found that the trunk motion adapted significantly faster than the motion of the arms. However, the most striking finding was that observations of the initial phase of the left arm or trunk motion (100-400 ms) were sufficient to faithfully predict the complete movement of the right arm. Overall, our results suggest that the goal-directed arm movements determine the supportive arm motions and that the motion of heavy body parts adapts faster than the light arms.
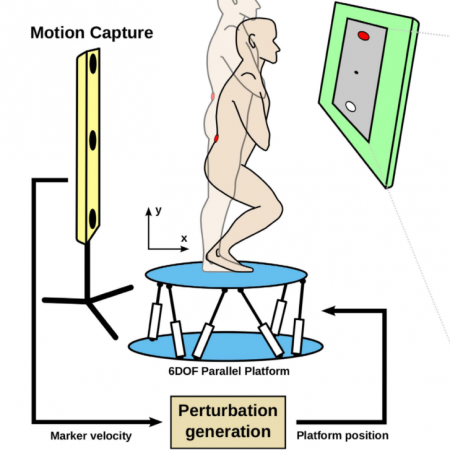
Babič, Jan; Oztop, Erhan; Kawato, Mitsuo
Human motor adaptation in whole body motion Journal Article
In: Scientific Reports, vol. 6, no. 1, pp. 32868, 2016, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Babic2016,
title = {Human motor adaptation in whole body motion},
author = {Jan Babi\v{c} and Erhan Oztop and Mitsuo Kawato},
url = {http://www.nature.com/articles/srep32868},
doi = {10.1038/srep32868},
issn = {2045-2322},
year = {2016},
date = {2016-01-01},
journal = {Scientific Reports},
volume = {6},
number = {1},
pages = {32868},
publisher = {Nature Publishing Group},
abstract = {The main role of the sensorimotor system of an organism is to increase the survival of the species. Therefore, to understand the adaptation and optimality mechanisms of motor control, it is necessary to study the sensorimotor system in terms of ecological fitness. We designed an experimental paradigm that exposed sensorimotor system to risk of injury. We studied human subjects performing uncon- strained squat-to-stand movements that were systematically subjected to non-trivial perturbation. We found that subjects adapted by actively compensating the perturbations, converging to movements that were different from their normal unperturbed squat-to-stand movements. Furthermore, the adapted movements had clear intrinsic inter-subject differences which could be explained by different adapta- tion strategies employed by the subjects. These results suggest that classical optimality measures of physical energy and task satisfaction should be seen as part of a hierarchical organization of optimality with safety being at the highest level. Therefore, in addition to physical energy and task fulfillment, the risk of injury and other possible costs such as neural computational overhead have to be considered when analyzing human movement.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The main role of the sensorimotor system of an organism is to increase the survival of the species. Therefore, to understand the adaptation and optimality mechanisms of motor control, it is necessary to study the sensorimotor system in terms of ecological fitness. We designed an experimental paradigm that exposed sensorimotor system to risk of injury. We studied human subjects performing uncon- strained squat-to-stand movements that were systematically subjected to non-trivial perturbation. We found that subjects adapted by actively compensating the perturbations, converging to movements that were different from their normal unperturbed squat-to-stand movements. Furthermore, the adapted movements had clear intrinsic inter-subject differences which could be explained by different adapta- tion strategies employed by the subjects. These results suggest that classical optimality measures of physical energy and task satisfaction should be seen as part of a hierarchical organization of optimality with safety being at the highest level. Therefore, in addition to physical energy and task fulfillment, the risk of injury and other possible costs such as neural computational overhead have to be considered when analyzing human movement.
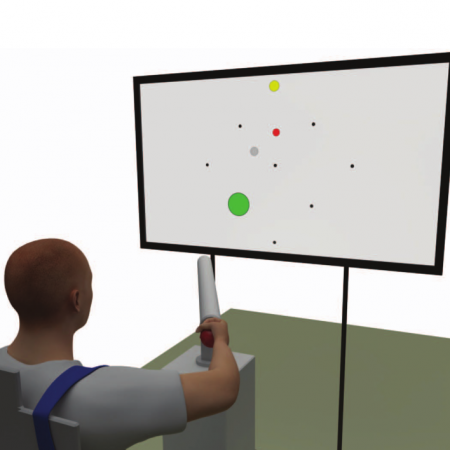
Petrič, Tadej; Goljat, Rok; Babič, Jan
Cooperative human-robot control based on Fitts' law Proceedings Article
In: 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pp. 345–350, IEEE, Cancun, 2016, ISBN: 978-1-5090-4718-5.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@inproceedings{Petric2016b,
title = {Cooperative human-robot control based on Fitts' law},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7803299/},
doi = {10.1109/HUMANOIDS.2016.7803299},
isbn = {978-1-5090-4718-5},
year = {2016},
date = {2016-01-01},
booktitle = {2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids)},
pages = {345--350},
publisher = {IEEE},
address = {Cancun},
abstract = {Many studies on human motor control have exam- ined how humans move the arms. A well known phenomenon known as the Fitts' law describes the trade-off between the speed of motion and its accuracy. In robotics, many studies were performed, and different control methods were proposed, for robots working in well structured environments. Neverthe- less, the cooperation between humans and robots remains a challenging task that is highly relevant for robots aiming to work together with humans in non-structured environments. In this paper we propose a novel method for on-line adap- tation of robotic trajectories, where humans and robots are autonomous agents coupled through physical interaction, for example through manipulated object. Within the proposed framework, the robot adapts to the human motion through the sensory feedback by taking into account the Fitts' law where the user specific behavior is estimated using a recursive least square updates. The movement trajectories are represented by the Dynamic Movement Primitives, where the adaptation relies on the Iterative Learning Controller framework. The proposed approach was evaluated by a cooperative human robot arm- reaching task on a plane. We tested the accuracy and efficiency of the proposed method, showed its relevance and demonstrated that the proposed approach fully adapts to the human motor control and maintains the desired accuracy of the movement.},
keywords = {Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Many studies on human motor control have exam- ined how humans move the arms. A well known phenomenon known as the Fitts' law describes the trade-off between the speed of motion and its accuracy. In robotics, many studies were performed, and different control methods were proposed, for robots working in well structured environments. Neverthe- less, the cooperation between humans and robots remains a challenging task that is highly relevant for robots aiming to work together with humans in non-structured environments. In this paper we propose a novel method for on-line adap- tation of robotic trajectories, where humans and robots are autonomous agents coupled through physical interaction, for example through manipulated object. Within the proposed framework, the robot adapts to the human motion through the sensory feedback by taking into account the Fitts' law where the user specific behavior is estimated using a recursive least square updates. The movement trajectories are represented by the Dynamic Movement Primitives, where the adaptation relies on the Iterative Learning Controller framework. The proposed approach was evaluated by a cooperative human robot arm- reaching task on a plane. We tested the accuracy and efficiency of the proposed method, showed its relevance and demonstrated that the proposed approach fully adapts to the human motor control and maintains the desired accuracy of the movement.
2014
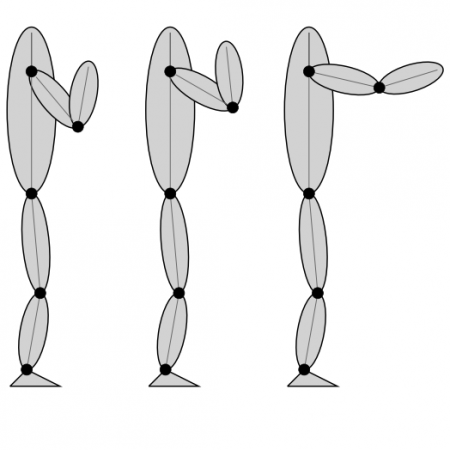
Azad, Morteza; Babič, Jan; Mistry, Michael
Effects of hand contact on the stability of a planar humanoid with a momentum based controller Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 348–353, IEEE, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2014,
title = {Effects of hand contact on the stability of a planar humanoid with a momentum based controller},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {http://ieeexplore.ieee.org/document/7041383/},
doi = {10.1109/HUMANOIDS.2014.7041383},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-11-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {348--353},
publisher = {IEEE},
abstract = {This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.
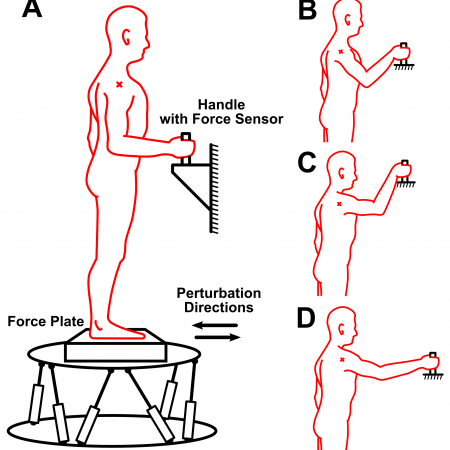
Babič, Jan; Petrič, Tadej; Peternel, Luka; Šarabon, Nejc
Effects of supportive hand contact on reactive postural control during support perturbations Journal Article
In: Gait & Posture, vol. 40, no. 3, pp. 441–446, 2014, ISSN: 09666362.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2014,
title = {Effects of supportive hand contact on reactive postural control during support perturbations},
author = {Jan Babi\v{c} and Tadej Petri\v{c} and Luka Peternel and Nejc \v{S}arabon},
url = {http://www.sciencedirect.com/science/article/pii/S096663621400544X},
doi = {10.1016/j.gaitpost.2014.05.012},
issn = {09666362},
year = {2014},
date = {2014-01-01},
journal = {Gait \& Posture},
volume = {40},
number = {3},
pages = {441--446},
abstract = {There are many everyday situations in which a supportive hand contact is required for an individual to counteract various postural perturbations. By emulating situations when balance of an individual is challenged, we examined functional role of supportive hand contact at different locations where balance of an individual was perturbed by translational perturbations of the support surface. We examined the effects of handle location, perturbation direction and perturbation intensity on the postural control and the forces generated in the handle. There were significantly larger centre-of-pressure (CoP) displacements for perturbations in posterior direction than for perturbations in anterior direction. Besides, the perturbation intensity significantly affected the peak CoP displacement in both perturbation directions. However, the position of the handle had no effects on the peak CoP displacement. On the contrary, there were significant effects of perturbation direction, perturbation intensity and handle position on the maximal force in the handle. The effect of the handle position was significant for the perturbations in posterior direction where the lowest maximal forces were recorded in the handle located at the shoulder height. They were comparable to the forces in the handle at eye height and significantly lower than the forces in the handle located either lower or further away from the shoulder. In summary, our results indicate that although the location of a supportive hand contact has no effect on the peak CoP displacement of healthy individuals, it affects the forces that an individual needs to exert on the handle in order to counteract support perturbations.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
There are many everyday situations in which a supportive hand contact is required for an individual to counteract various postural perturbations. By emulating situations when balance of an individual is challenged, we examined functional role of supportive hand contact at different locations where balance of an individual was perturbed by translational perturbations of the support surface. We examined the effects of handle location, perturbation direction and perturbation intensity on the postural control and the forces generated in the handle. There were significantly larger centre-of-pressure (CoP) displacements for perturbations in posterior direction than for perturbations in anterior direction. Besides, the perturbation intensity significantly affected the peak CoP displacement in both perturbation directions. However, the position of the handle had no effects on the peak CoP displacement. On the contrary, there were significant effects of perturbation direction, perturbation intensity and handle position on the maximal force in the handle. The effect of the handle position was significant for the perturbations in posterior direction where the lowest maximal forces were recorded in the handle located at the shoulder height. They were comparable to the forces in the handle at eye height and significantly lower than the forces in the handle located either lower or further away from the shoulder. In summary, our results indicate that although the location of a supportive hand contact has no effect on the peak CoP displacement of healthy individuals, it affects the forces that an individual needs to exert on the handle in order to counteract support perturbations.
2013
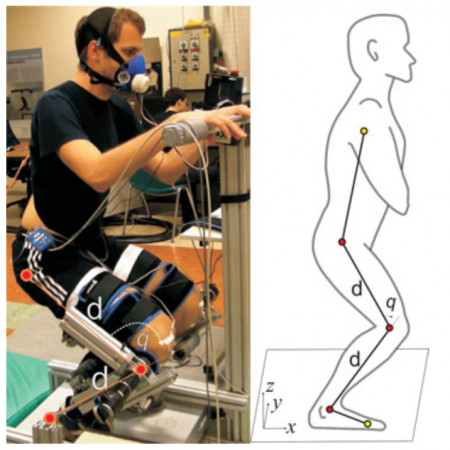
Gams, Andrej; Petrič, Tadej; Debevec, Tadej; Babič, Jan
Effects of Robotic Knee Exoskeleton on Human Energy Expenditure Journal Article
In: IEEE Transactions on Biomedical Engineering, vol. 60, no. 6, pp. 1636–1644, 2013, ISSN: 0018-9294.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Gams2013,
title = {Effects of Robotic Knee Exoskeleton on Human Energy Expenditure},
author = {Andrej Gams and Tadej Petri\v{c} and Tadej Debevec and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6414598/},
doi = {10.1109/TBME.2013.2240682},
issn = {0018-9294},
year = {2013},
date = {2013-06-01},
journal = {IEEE Transactions on Biomedical Engineering},
volume = {60},
number = {6},
pages = {1636--1644},
abstract = {A number of studies discuss the design and control of various exoskeleton mechanisms, yet relatively few address the effect on the energy expenditure of the user. In this paper, we discuss the effect of a performance augmenting exoskeleton on the metabolic cost of an able-bodied user/pilot during periodic squatting. We investigated whether an exoskeleton device will significantly reduce the metabolic cost and what is the influence of the chosen device control strategy. By measuring oxygen consumption, minute ventilation, heart rate, blood oxygenation, and muscle EMG during 5-min squatting series, at one squat every 2 s, we show the effects of using a prototype robotic knee exoskeleton under three different noninvasive control approaches: gravity compensation approach, position-based approach, and a novel oscillator-based approach. The latter proposes a novel control that ensures synchronization of the device and the user. Statistically significant decrease in physiological responses can be observed when using the robotic knee exoskeleton under gravity compensation and oscillator-based control. On the other hand, the effects of position-based control were not significant in all parameters although all approaches significantly reduced the energy expenditure during squatting.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
A number of studies discuss the design and control of various exoskeleton mechanisms, yet relatively few address the effect on the energy expenditure of the user. In this paper, we discuss the effect of a performance augmenting exoskeleton on the metabolic cost of an able-bodied user/pilot during periodic squatting. We investigated whether an exoskeleton device will significantly reduce the metabolic cost and what is the influence of the chosen device control strategy. By measuring oxygen consumption, minute ventilation, heart rate, blood oxygenation, and muscle EMG during 5-min squatting series, at one squat every 2 s, we show the effects of using a prototype robotic knee exoskeleton under three different noninvasive control approaches: gravity compensation approach, position-based approach, and a novel oscillator-based approach. The latter proposes a novel control that ensures synchronization of the device and the user. Statistically significant decrease in physiological responses can be observed when using the robotic knee exoskeleton under gravity compensation and oscillator-based control. On the other hand, the effects of position-based control were not significant in all parameters although all approaches significantly reduced the energy expenditure during squatting.
2012
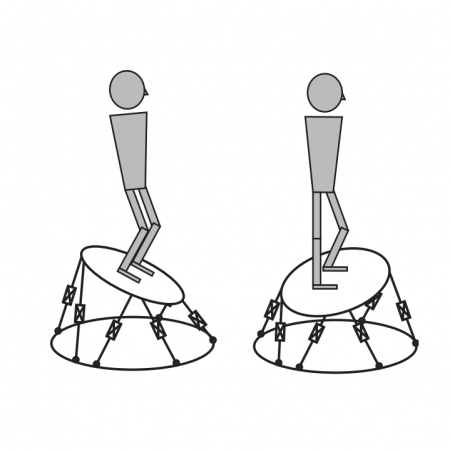
Babič, Jan; Škorja, Goran
Analysis of musculoskeletal system responses to pertrubations during standing posture Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 79, no. 1-2, pp. 7–12, 2012, ISSN: 00135852.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2012,
title = {Analysis of musculoskeletal system responses to pertrubations during standing posture},
author = {Jan Babi\v{c} and Goran \v{S}korja},
url = {http://ev.fe.uni-lj.si/1-2-2012/Babic.pdf},
issn = {00135852},
year = {2012},
date = {2012-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {79},
number = {1-2},
pages = {7--12},
abstract = {The purpose of the study is to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. We used an enhanced experimental approach compared to the traditionally used methods in the previous studies by other researchers where the support surface beneath the subject's feet randomly perturbed the equilibrium. Instead of a predetermined motion of the support surface that would cause the perturbation of the subject's equilibrium, we perturbed the equilibrium by a Stewart parallel platform. Mounted on the platform, a force plate was recording the motion of the centre-of-mass projection during the experiment. This setup enabled the subjects to actively control the orientation of the parallel platform by shifting the position of their centre-of-mass during the experiment. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses to the visual stimuli. Compared to the results of the previous studies, muscular activities during the stretch and proprioceptive reflex are more equally distributed in all directions. Based on the motion of the subjects that we recorded using the motion capture system, we determined whether the muscles were stretching or extending during the responses to the perturbations. We also show the effectiveness of the muscles to compensate the perturbations in different directions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The purpose of the study is to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. We used an enhanced experimental approach compared to the traditionally used methods in the previous studies by other researchers where the support surface beneath the subject's feet randomly perturbed the equilibrium. Instead of a predetermined motion of the support surface that would cause the perturbation of the subject's equilibrium, we perturbed the equilibrium by a Stewart parallel platform. Mounted on the platform, a force plate was recording the motion of the centre-of-mass projection during the experiment. This setup enabled the subjects to actively control the orientation of the parallel platform by shifting the position of their centre-of-mass during the experiment. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses to the visual stimuli. Compared to the results of the previous studies, muscular activities during the stretch and proprioceptive reflex are more equally distributed in all directions. Based on the motion of the subjects that we recorded using the motion capture system, we determined whether the muscles were stretching or extending during the responses to the perturbations. We also show the effectiveness of the muscles to compensate the perturbations in different directions.
2004
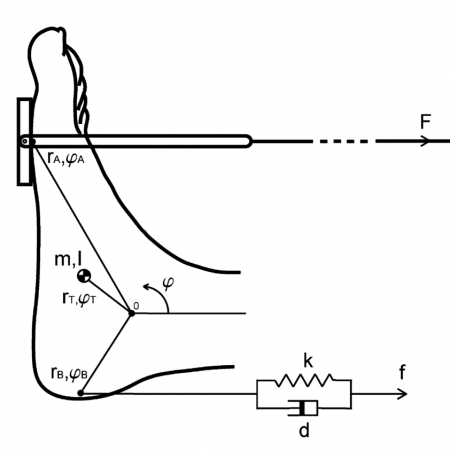
Babič, Jan; Lenarčič, Jadran
In vivo determination of triceps surae muscle-tendon complex viscoelastic properties Journal Article
In: European Journal of Applied Physiology, vol. 92, no. 4-5, pp. 477–84, 2004, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Biarticular Muscle, Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Babic2004,
title = {In vivo determination of triceps surae muscle-tendon complex viscoelastic properties},
author = {Jan Babi\v{c} and Jadran Lenar\v{c}i\v{c}},
url = {http://link.springer.com/10.1007/s00421-004-1107-4},
doi = {10.1007/s00421-004-1107-4},
issn = {1439-6319},
year = {2004},
date = {2004-01-01},
journal = {European Journal of Applied Physiology},
volume = {92},
number = {4-5},
pages = {477--84},
abstract = {Viscoelastic properties of muscles and tendons have an important influence on human motion performance. Proper determination of these properties is essential in the analysis and modelling of human motion dynamics. The purpose of our study was to develop a method for in vivo determination of the viscoelastic properties of the entire triceps surae muscle-tendon complex (MTC) including the gastrocnemius. Ten trained male subjects participated in this study. The measurement procedure consisted of two parts: soleus and Achilles tendon stiffness and viscosity were determined in the first part while the gastrocnemius stiffness and viscosity were determined in the second part. The measurement device and the procedure have been designed in such a manner that as few human body segments move as possible during the measurement. Thus, the measurement uncertainty due to the approximation of the properties of the human body segments was minimized. Triceps surae MTC viscoelastic properties of both legs were measured for each subject. There were no significant differences in viscoelastic coefficients for left and right lower extremities; however, there were noticeable differences between subjects. The soleus stiffness coefficient was greater than the gastrocnemius stiffness coefficient by 87.6 m(-1) in average. For all subjects, soleus viscosity was equal or greater than gastrocnemius viscosity. Values of viscoelastic parameters obtained by our method can be used in the analysis and modelling of human movement in situations where the knee joint is not necessarily flexed and there is coactivation of the soleus and the gastrocnemius.},
keywords = {Biarticular Muscle, Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Viscoelastic properties of muscles and tendons have an important influence on human motion performance. Proper determination of these properties is essential in the analysis and modelling of human motion dynamics. The purpose of our study was to develop a method for in vivo determination of the viscoelastic properties of the entire triceps surae muscle-tendon complex (MTC) including the gastrocnemius. Ten trained male subjects participated in this study. The measurement procedure consisted of two parts: soleus and Achilles tendon stiffness and viscosity were determined in the first part while the gastrocnemius stiffness and viscosity were determined in the second part. The measurement device and the procedure have been designed in such a manner that as few human body segments move as possible during the measurement. Thus, the measurement uncertainty due to the approximation of the properties of the human body segments was minimized. Triceps surae MTC viscoelastic properties of both legs were measured for each subject. There were no significant differences in viscoelastic coefficients for left and right lower extremities; however, there were noticeable differences between subjects. The soleus stiffness coefficient was greater than the gastrocnemius stiffness coefficient by 87.6 m(-1) in average. For all subjects, soleus viscosity was equal or greater than gastrocnemius viscosity. Values of viscoelastic parameters obtained by our method can be used in the analysis and modelling of human movement in situations where the knee joint is not necessarily flexed and there is coactivation of the soleus and the gastrocnemius.
2001
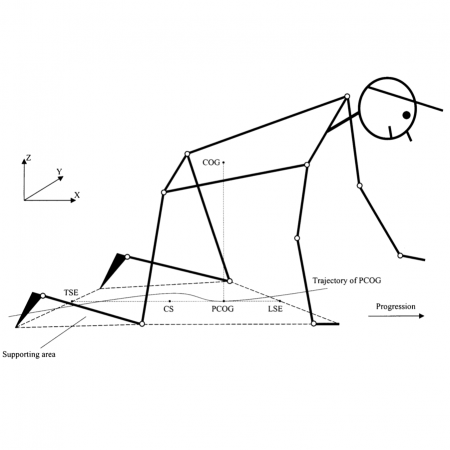
Babič, Jan; Karčnik, Tomaž; Bajd, Tadej
Stability analysis of four-point walking Journal Article
In: Gait & Posture, vol. 14, no. 1, pp. 56–60, 2001, ISSN: 09666362.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2001,
title = {Stability analysis of four-point walking},
author = {Jan Babi\v{c} and Toma\v{z} Kar\v{c}nik and Tadej Bajd},
url = {https://www.sciencedirect.com/science/article/pii/S0966636201001096},
doi = {10.1016/S0966-6362(01)00109-6},
issn = {09666362},
year = {2001},
date = {2001-01-01},
journal = {Gait \& Posture},
volume = {14},
number = {1},
pages = {56--60},
abstract = {The aim of the experiment reported here was to determine the static and dynamic stability of two-point stance phases when walking on hands and knees at different speeds. In addition, we defined the methods and predicted the consequences of including two-point stance phases into crutch assisted functional electrical stimulation (FES) walking. Crawling on hands and knees was performed at three speeds by five healthy male persons. With twelve joint-position markers placed on the subject, we determined two stability indices for every instant of gait. We analysed the peak values of these two indices during the two-point stance phases. The results indicate that we have to ensure the proper position of the centre of gravity to increase the speed of walking. To reach speeds, lower than 0.6 m/s, it is not necessary to include statically unstable phases. The shift of the centre of gravity towards and across the leading stability edge can result in getting into the dynamically unstable state. Considering the results we can effectively introduce two-point stance phases into crutch assisted FES walking and therefore increase the speed and energy effectiveness of walking},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The aim of the experiment reported here was to determine the static and dynamic stability of two-point stance phases when walking on hands and knees at different speeds. In addition, we defined the methods and predicted the consequences of including two-point stance phases into crutch assisted functional electrical stimulation (FES) walking. Crawling on hands and knees was performed at three speeds by five healthy male persons. With twelve joint-position markers placed on the subject, we determined two stability indices for every instant of gait. We analysed the peak values of these two indices during the two-point stance phases. The results indicate that we have to ensure the proper position of the centre of gravity to increase the speed of walking. To reach speeds, lower than 0.6 m/s, it is not necessary to include statically unstable phases. The shift of the centre of gravity towards and across the leading stability edge can result in getting into the dynamically unstable state. Considering the results we can effectively introduce two-point stance phases into crutch assisted FES walking and therefore increase the speed and energy effectiveness of walking
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si