




2024

Jamšek, Marko; Sajko, Gal; Krpan, Jurij; Babič, Jan
Design and Control of a Climbing Robot for Autonomous Vertical Gardening Journal Article
In: Machines, vol. 12, iss. 2, pp. 141, 2024, ISSN: 2075-1702.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Robot Design | Links:
@article{nokey,
title = {Design and Control of a Climbing Robot for Autonomous Vertical Gardening},
author = {Marko Jam\v{s}ek and Gal Sajko and Jurij Krpan and Jan Babi\v{c}},
doi = {10.3390/machines12020141},
issn = {2075-1702},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Machines},
volume = {12},
issue = {2},
pages = {141},
abstract = {This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.},
keywords = {Compliance and Impedance Control, Kinematics, Robot Design},
pubstate = {published},
tppubtype = {article}
}
This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.
2023
Dežman, Miha; Massardi, Stefano; Pinto-Fernandez, David; Grosu, Victor; Rodriguez-Guerrero, Carlos; Babič, Jan; Torricelli, Diego
A mechatronic leg replica to benchmark human–exoskeleton physical interactions Journal Article
In: Bioinspiration & Biomimetics, vol. 18, iss. 3, pp. 036009, 2023, ISSN: 1748-3182.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design | Links:
@article{dezman2023,
title = {A mechatronic leg replica to benchmark human\textendashexoskeleton physical interactions},
author = {Miha De\v{z}man and Stefano Massardi and David Pinto-Fernandez and Victor Grosu and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Diego Torricelli},
doi = {10.1088/1748-3190/accda8},
issn = {1748-3182},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Bioinspiration \& Biomimetics},
volume = {18},
issue = {3},
pages = {036009},
abstract = {Evaluating human\textendashexoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Evaluating human–exoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.
2019
Babič, Jan; Petrič, Tadej; Mombaur, Katja; Kingma, Idsart; Bornmann, Jonas; Gonzalez-Vargas, Jose; Baltrusch, Saskia; Šarabon, Nejc; Houdijk, Han
SPEXOR: Design and development of passive spinal exoskeletal robot for low back pain prevention and vocational reintegration Journal Article
In: SN Applied Sciences, vol. 1, no. 3, pp. 262, 2019, ISSN: 2523-3963.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Robot Design | Links:
@article{Babic2019,
title = {SPEXOR: Design and development of passive spinal exoskeletal robot for low back pain prevention and vocational reintegration},
author = {Jan Babi\v{c} and Tadej Petri\v{c} and Katja Mombaur and Idsart Kingma and Jonas Bornmann and Jose Gonzalez-Vargas and Saskia Baltrusch and Nejc \v{S}arabon and Han Houdijk},
url = {http://link.springer.com/10.1007/s42452-019-0266-1},
doi = {10.1007/s42452-019-0266-1},
issn = {2523-3963},
year = {2019},
date = {2019-03-01},
urldate = {2019-03-01},
journal = {SN Applied Sciences},
volume = {1},
number = {3},
pages = {262},
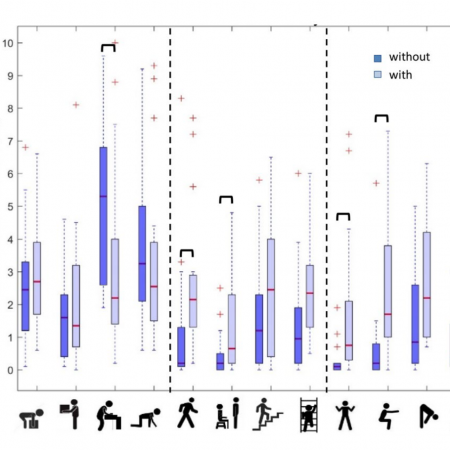
abstract = {The objective of SPEXOR project is to address low back pain as one of the most appealing health problems of the modern society by creating a body of scientific and technological knowledge in the multidisciplinary areas of biomechanics, robotics, and computer science that will lead to technologies for low back pain prevention. In this paper we provide an overview of the current state-of-art of SPEXOR that the consortium achieved in the first twenty-four months of the project. After introducing the rationale, we describe the biomechanics of low back pain intervention, development of the musculoskeletal stress monitoring for assessment of neuromuscular trunk functions, modeling and optimization of the interaction of spinal exoskeleton with the human body, electromechanical design and development of the passive spinal exoskeleton and its control, and finally the end-user evaluation of the functional effects, usability and satisfaction.},
keywords = {Exoskeleton Design and Control, Robot Design},
pubstate = {published},
tppubtype = {article}
}
The objective of SPEXOR project is to address low back pain as one of the most appealing health problems of the modern society by creating a body of scientific and technological knowledge in the multidisciplinary areas of biomechanics, robotics, and computer science that will lead to technologies for low back pain prevention. In this paper we provide an overview of the current state-of-art of SPEXOR that the consortium achieved in the first twenty-four months of the project. After introducing the rationale, we describe the biomechanics of low back pain intervention, development of the musculoskeletal stress monitoring for assessment of neuromuscular trunk functions, modeling and optimization of the interaction of spinal exoskeleton with the human body, electromechanical design and development of the passive spinal exoskeleton and its control, and finally the end-user evaluation of the functional effects, usability and satisfaction.
2017

Potočanac, Zrinka; Goljat, Rok; Babič, Jan
A robotic system for delivering novel real-time, movement dependent perturbations Journal Article
In: Gait & Posture, vol. 58, pp. 386–389, 2017, ISSN: 09666362.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance, Robot Design | Links:
@article{Potocanac2017,
title = {A robotic system for delivering novel real-time, movement dependent perturbations},
author = {Zrinka Poto\v{c}anac and Rok Goljat and Jan Babi\v{c}},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0966636217308949},
doi = {10.1016/j.gaitpost.2017.08.038},
issn = {09666362},
year = {2017},
date = {2017-01-01},
journal = {Gait \& Posture},
volume = {58},
pages = {386--389},
abstract = {Perturbations are often used to study movement control and balance, especially in the context of falling. Most often, discrete perturbations defined prior to the experiment are used to mimic external disturbances to balance. However, the largest proportion of falls is due to self-generated errors in weight shifting. Inspired by self-generated weight shifting errors, we created a novel, continuous mediolateral perturbation proportional to subjects' mediolateral center of mass movement with minimal delays. This perturbation was delivered by a robotic platform controlled by a real time Matlab Simulink model using kinematic data from a marker positioned at subjects' L5 as input. Fifteen healthy young adults stood as still as possible atop the robotic platform with their eyes closed. We evaluated the performance of the perturbation in terms of accuracy and delay relative to the input signal by using cross-correlations. The perturbations were accurate (r = −0.984), with delays of 154 ms. Such systematic perturbation significantly affected mediolateral sway, increasing its range (from 5.56 ± 3.72 to 9.58 ± 4.83 mm},
keywords = {Human Motor Control, Postural Balance, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Perturbations are often used to study movement control and balance, especially in the context of falling. Most often, discrete perturbations defined prior to the experiment are used to mimic external disturbances to balance. However, the largest proportion of falls is due to self-generated errors in weight shifting. Inspired by self-generated weight shifting errors, we created a novel, continuous mediolateral perturbation proportional to subjects' mediolateral center of mass movement with minimal delays. This perturbation was delivered by a robotic platform controlled by a real time Matlab Simulink model using kinematic data from a marker positioned at subjects' L5 as input. Fifteen healthy young adults stood as still as possible atop the robotic platform with their eyes closed. We evaluated the performance of the perturbation in terms of accuracy and delay relative to the input signal by using cross-correlations. The perturbations were accurate (r = −0.984), with delays of 154 ms. Such systematic perturbation significantly affected mediolateral sway, increasing its range (from 5.56 ± 3.72 to 9.58 ± 4.83 mm
2010

Škorja, Goran; Babič, Jan
Implementation of the three degrees-of-freedom parallel platform in human posture analysis Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 321–326, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Postural Balance, Robot Design | Links:
@inproceedings{Skorja2010a,
title = {Implementation of the three degrees-of-freedom parallel platform in human posture analysis},
author = {Goran \v{S}korja and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/5524566/},
doi = {10.1109/RAAD.2010.5524566},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-06-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {321--326},
publisher = {IEEE},
address = {Budapest},
abstract = {The purpose of this study was to implement a three degrees-of-freedom inclining parallel platform to provide postural perturbations for examining human balance during the standing posture. The inclining parallel platform was capable of generating random rotation disturbances in sixteen different directions. By measuring the projection of the subject's centre of mass with a force plate mounted on top of the parallel platform, we had the ability to control the parallel platform rotation in a real time.},
keywords = {Postural Balance, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
The purpose of this study was to implement a three degrees-of-freedom inclining parallel platform to provide postural perturbations for examining human balance during the standing posture. The inclining parallel platform was capable of generating random rotation disturbances in sixteen different directions. By measuring the projection of the subject's centre of mass with a force plate mounted on top of the parallel platform, we had the ability to control the parallel platform rotation in a real time.
2009
Babič, Jan; Lim, Bokman; Omrčen, Damir; Lenarčič, Jadran; Park, Frank C
A Biarticulated Robotic Leg for Jumping Movements: Theory and Experiments Journal Article
In: Journal of Mechanisms and Robotics, vol. 1, no. 1, pp. 011013, 2009, ISSN: 19424302.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@article{Babic2009,
title = {A Biarticulated Robotic Leg for Jumping Movements: Theory and Experiments},
author = {Jan Babi\v{c} and Bokman Lim and Damir Omr\v{c}en and Jadran Lenar\v{c}i\v{c} and Frank C Park},
url = {http://mechanismsrobotics.asmedigitalcollection.asme.org/article.aspx?articleid=1484860},
doi = {10.1115/1.2963028},
issn = {19424302},
year = {2009},
date = {2009-01-01},
journal = {Journal of Mechanisms and Robotics},
volume = {1},
number = {1},
pages = {011013},
abstract = {This paper investigates the extent to which biarticular actuation mechanisms\textemdashspring-driven redundant actuation schemes that extend over two joints, similar in function to biarticular muscles found in legged animals\textemdashimprove the performance of jumping and other fast explosive robot movements. Robust numerical optimization algorithms that take into account the complex dynamics of both the redundantly actuated system and frictional contact forces are developed. We then quantitatively evaluate the gains in vertical jumping vis-\`{a}-vis monoarticular and biarticular joint actuation schemes and examine the effects of spring stiffness and activation angle on overall jump performance. Both numerical simulations and experiments with a hardware prototype of a biarticular legged robot are reported.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {article}
}
This paper investigates the extent to which biarticular actuation mechanisms—spring-driven redundant actuation schemes that extend over two joints, similar in function to biarticular muscles found in legged animals—improve the performance of jumping and other fast explosive robot movements. Robust numerical optimization algorithms that take into account the complex dynamics of both the redundantly actuated system and frictional contact forces are developed. We then quantitatively evaluate the gains in vertical jumping vis-à-vis monoarticular and biarticular joint actuation schemes and examine the effects of spring stiffness and activation angle on overall jump performance. Both numerical simulations and experiments with a hardware prototype of a biarticular legged robot are reported.
2008
Lim, Bokman; Babič, Jan; Park, Frank C
Optimal jumps for biarticular legged robots Proceedings Article
In: 2008 IEEE International Conference on Robotics and Automation, pp. 226–231, IEEE, Pasadena, 2008, ISBN: 978-1-4244-1646-2.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@inproceedings{Lim2008,
title = {Optimal jumps for biarticular legged robots},
author = {Bokman Lim and Jan Babi\v{c} and Frank C Park},
url = {http://ieeexplore.ieee.org/document/4543213/},
doi = {10.1109/ROBOT.2008.4543213},
isbn = {978-1-4244-1646-2},
year = {2008},
date = {2008-01-01},
booktitle = {2008 IEEE International Conference on Robotics and Automation},
pages = {226--231},
publisher = {IEEE},
address = {Pasadena},
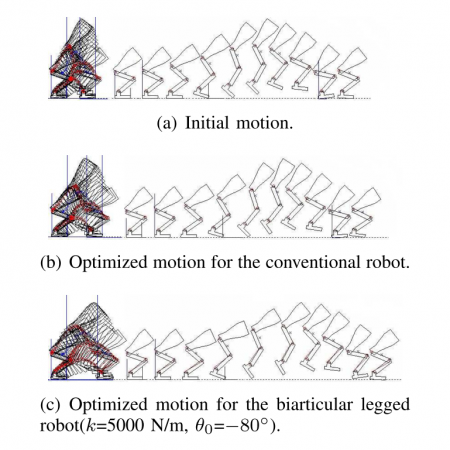
abstract = {This paper investigates the extent to which biar- ticular actuation mechanisms\textemdashantagonistic actuation schemes with spring stiffness that extend over two joints, similar in function to biarticular muscles found in legged animals\textemdash improve the performance of jumping and other fast explosive robot movements. Robust gradient-based optimization algo- rithms that take into account the dynamic properties and various contact and actuator constraints of biarticular systems are developed. We then quantitatively evaluate the gains in jumping vis-` a-vis conventional joint actuation schemes.We also examine the effects of biarticular link stiffness and link mass distributions on the jumping performance of the biarticular mechanism.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper investigates the extent to which biar- ticular actuation mechanisms—antagonistic actuation schemes with spring stiffness that extend over two joints, similar in function to biarticular muscles found in legged animals— improve the performance of jumping and other fast explosive robot movements. Robust gradient-based optimization algo- rithms that take into account the dynamic properties and various contact and actuator constraints of biarticular systems are developed. We then quantitatively evaluate the gains in jumping vis-` a-vis conventional joint actuation schemes.We also examine the effects of biarticular link stiffness and link mass distributions on the jumping performance of the biarticular mechanism.

Babič, Jan
Biarticular legged robot: Design and experiments Proceedings Article
In: 2008 IEEE International Conference on Robotics and Biomimetics, pp. 155–159, IEEE, Bangkok, 2008, ISBN: 978-1-4244-2678-2.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@inproceedings{Babic2008,
title = {Biarticular legged robot: Design and experiments},
author = {Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/4912996/},
doi = {10.1109/ROBIO.2009.4912996},
isbn = {978-1-4244-2678-2},
year = {2008},
date = {2008-01-01},
booktitle = {2008 IEEE International Conference on Robotics and Biomimetics},
pages = {155--159},
publisher = {IEEE},
address = {Bangkok},
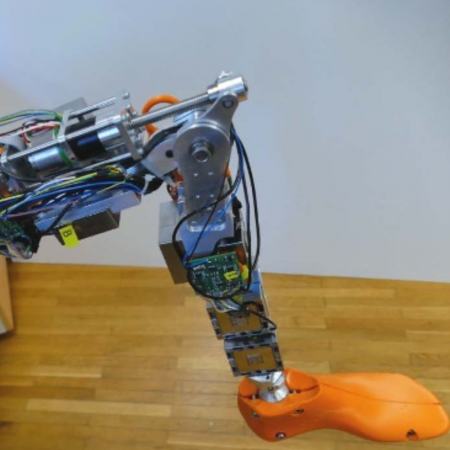
abstract = {In the paper we describe the design process of a biarticular legged robotic system inspired by the anatomic properties or the human body and report the vertical jump experiments performed by the hardware prototype of the robot. We describe the starting points and the requirements that follow from the biomechanical properties of the human leg. Then we describe the CAD model of the robot and the construction of the real robotic system. Afterwards we show in detail the development of the dynamic model needed for simulation of the jump and for the control of the real robot. The vertical jump experiments are presented and analyzed in the last section.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
In the paper we describe the design process of a biarticular legged robotic system inspired by the anatomic properties or the human body and report the vertical jump experiments performed by the hardware prototype of the robot. We describe the starting points and the requirements that follow from the biomechanical properties of the human leg. Then we describe the CAD model of the robot and the construction of the real robotic system. Afterwards we show in detail the development of the dynamic model needed for simulation of the jump and for the control of the real robot. The vertical jump experiments are presented and analyzed in the last section.
2006

Babič, Jan; Lenarčič, Jadran
Optimization of biarticular gastrocnemious muscle in humanoid jumping robot simulation Journal Article
In: International Journal of Humanoid Robotics, vol. 3, no. 2, pp. 219–234, 2006, ISSN: 0219-8436.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@article{Babic2006,
title = {Optimization of biarticular gastrocnemious muscle in humanoid jumping robot simulation},
author = {Jan Babi\v{c} and Jadran Lenar\v{c}i\v{c}},
url = {http://www.worldscientific.com/doi/abs/10.1142/S0219843606000722},
doi = {10.1142/S0219843606000722},
issn = {0219-8436},
year = {2006},
date = {2006-01-01},
journal = {International Journal of Humanoid Robotics},
volume = {3},
number = {2},
pages = {219--234},
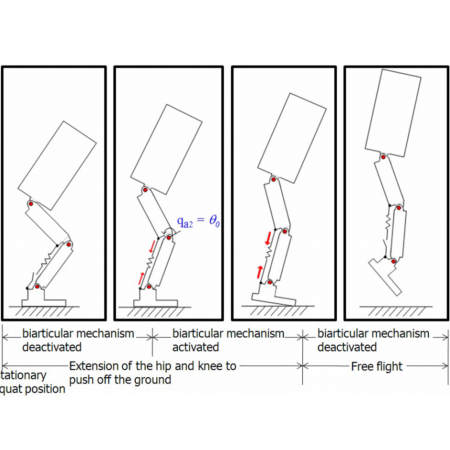
abstract = {We propose a new human inspired structure of the lower extremity mechanism by which a humanoid robot will be able to efficiently perform fast movements such as running and jumping. We build a dynamic model of the humanoid robot which includes an elastic model of the biarticular muscle gastrocnemius and determine the role of the biarticular muscles and the elastic tendons in performing the vertical jump. We demonstrate that biarticular links contribute a great deal to the performance of the vertical jump. We also show that timing of the biarticular link activation and stiffness of the biarticular link influence the height of the jump considerably.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {article}
}
We propose a new human inspired structure of the lower extremity mechanism by which a humanoid robot will be able to efficiently perform fast movements such as running and jumping. We build a dynamic model of the humanoid robot which includes an elastic model of the biarticular muscle gastrocnemius and determine the role of the biarticular muscles and the elastic tendons in performing the vertical jump. We demonstrate that biarticular links contribute a great deal to the performance of the vertical jump. We also show that timing of the biarticular link activation and stiffness of the biarticular link influence the height of the jump considerably.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si