




2025
Arditi, Emir; Kunavar, Tjasa; Amirshirzad, Negin; Ugur, Emre; Babič, Jan; Oztop, Erhan
Inferring effort-safety trade off in perturbed squat-to-stand task by reward parameter estimation Journal Article
In: Engineering Applications of Artificial Intelligence, vol. 142, pp. 109778, 2025, ISSN: 09521976.
Abstract | BibTeX | Tags: Human Motor Control, Machine Learning, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning | Links:
@article{Arditi2025,
title = {Inferring effort-safety trade off in perturbed squat-to-stand task by reward parameter estimation},
author = {Emir Arditi and Tjasa Kunavar and Negin Amirshirzad and Emre Ugur and Jan Babi\v{c} and Erhan Oztop},
doi = {10.1016/j.engappai.2024.109778},
issn = {09521976},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Engineering Applications of Artificial Intelligence},
volume = {142},
pages = {109778},
abstract = {In this study, an inverse reinforcement learning (IRL) method is developed to estimate the parameters of a reward function that is assumed to guide the movement of a biological or artificial agent. The workings of the method is shown on the problem of estimating the effort-safety trade-off of humans during perturbed squat-to-stand motions based on their Center of Mass (COM) trajectories. The proposed method involves data generation by reinforcement learning (RL) and a novel data augmentation mechanism followed by neural network training. After the training, the neural network acts as the reward parameter estimator given the Center of Mass (COM) trajectories as input. The performance of the developed method is assessed through systematic simulation experiments, where it is shown that the parameter estimation made by our method is significantly more accurate than the baseline of an optimized template-based IRL approach. In addition, as a proof of concept, a set of human movement data is analyzed with the developed method. The results revealed that most participants acquired a strategy that ensures low effort expenditure with a safety margin, producing COM trajectories slightly away from the effort-optimal.},
keywords = {Human Motor Control, Machine Learning, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In this study, an inverse reinforcement learning (IRL) method is developed to estimate the parameters of a reward function that is assumed to guide the movement of a biological or artificial agent. The workings of the method is shown on the problem of estimating the effort-safety trade-off of humans during perturbed squat-to-stand motions based on their Center of Mass (COM) trajectories. The proposed method involves data generation by reinforcement learning (RL) and a novel data augmentation mechanism followed by neural network training. After the training, the neural network acts as the reward parameter estimator given the Center of Mass (COM) trajectories as input. The performance of the developed method is assessed through systematic simulation experiments, where it is shown that the parameter estimation made by our method is significantly more accurate than the baseline of an optimized template-based IRL approach. In addition, as a proof of concept, a set of human movement data is analyzed with the developed method. The results revealed that most participants acquired a strategy that ensures low effort expenditure with a safety margin, producing COM trajectories slightly away from the effort-optimal.
Babič, Jan; Kunavar, Tjasa; Oztop, Erhan; Kawato, Mitsuo
Success-efficient/failure-safe strategy for hierarchical reinforcement motor learning Journal Article
In: PLOS Computational Biology, vol. 21, iss. 5, pp. e1013089, 2025, ISSN: 1553-7358.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Babi2025,
title = {Success-efficient/failure-safe strategy for hierarchical reinforcement motor learning},
author = {Jan Babi\v{c} and Tjasa Kunavar and Erhan Oztop and Mitsuo Kawato},
doi = {10.1371/journal.pcbi.1013089},
issn = {1553-7358},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {PLOS Computational Biology},
volume = {21},
issue = {5},
pages = {e1013089},
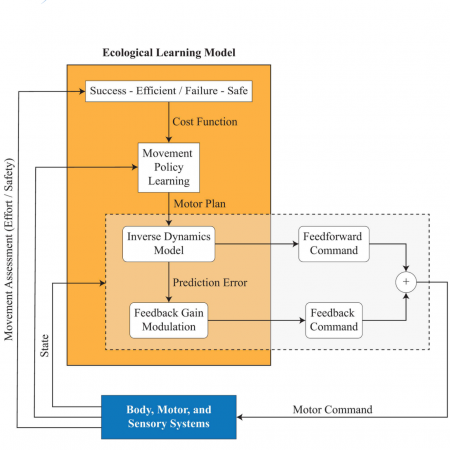
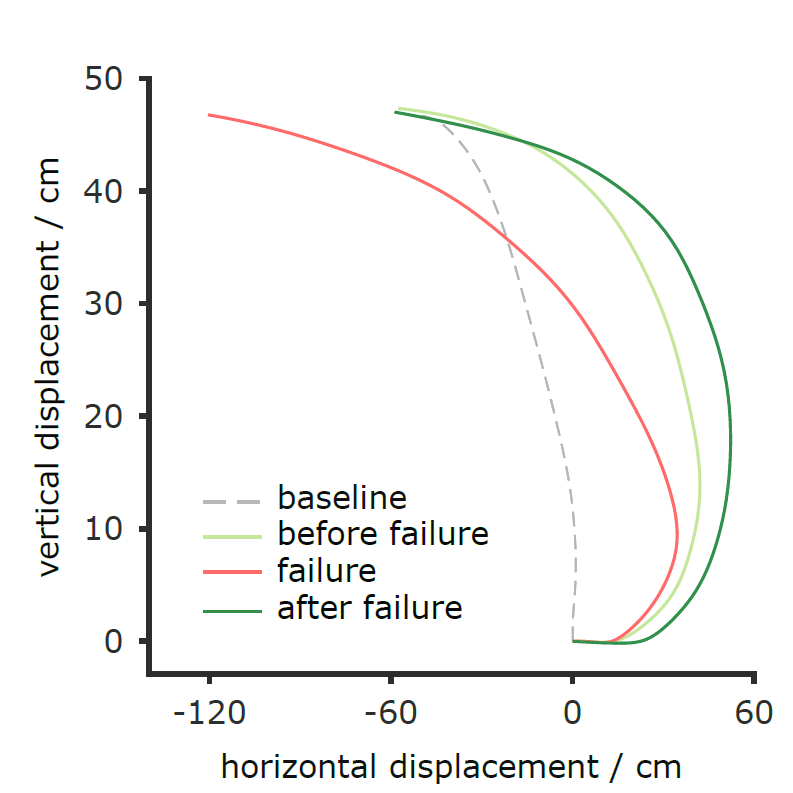
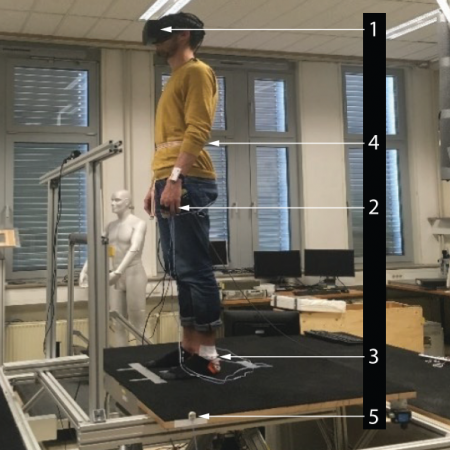
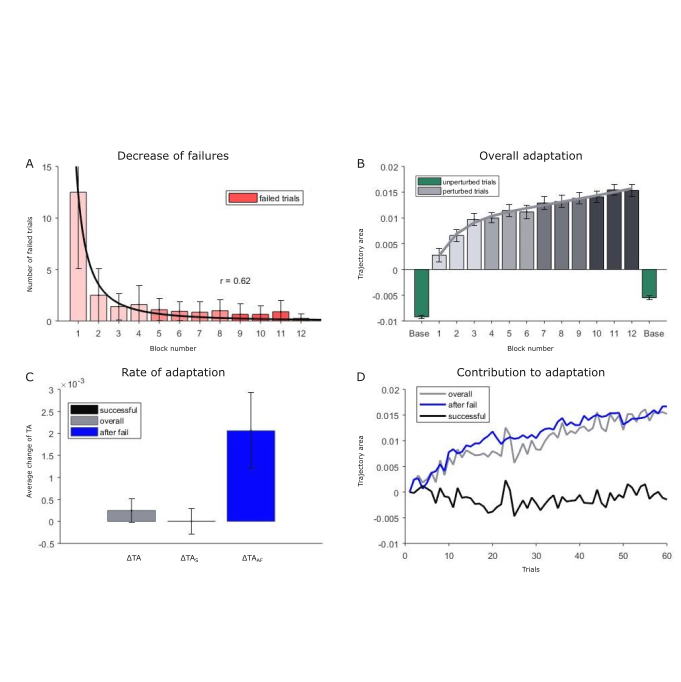
abstract = {Our study explores how ecological aspects of motor learning enhance survival by improving movement efficiency and mitigating injury risks during task failures. Traditional motor control theories mainly address isolated body movements and often overlook these ecological factors. We introduce a novel computational motor control approach, incorporating ecological fitness and a strategy that alternates between success-driven movement efficiency and failure-driven safety, akin to win-stay/lose-shift tactics. In our experiments, participants performed squat-to-stand movements under novel force perturbations. They adapted effectively through various adaptive motor control mechanisms to avoid falls, reducing failure rates rapidly. The results indicate a high-level ecological controller in human motor learning that switches objectives between safety and movement efficiency, depending on failure or success. This approach is supported by policy learning, internal model adaptation, and adaptive feedback control. Our findings offer a comprehensive perspective on human motor control, integrating risk management in a hierarchical reinforcement learning framework for real-world environments.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Our study explores how ecological aspects of motor learning enhance survival by improving movement efficiency and mitigating injury risks during task failures. Traditional motor control theories mainly address isolated body movements and often overlook these ecological factors. We introduce a novel computational motor control approach, incorporating ecological fitness and a strategy that alternates between success-driven movement efficiency and failure-driven safety, akin to win-stay/lose-shift tactics. In our experiments, participants performed squat-to-stand movements under novel force perturbations. They adapted effectively through various adaptive motor control mechanisms to avoid falls, reducing failure rates rapidly. The results indicate a high-level ecological controller in human motor learning that switches objectives between safety and movement efficiency, depending on failure or success. This approach is supported by policy learning, internal model adaptation, and adaptive feedback control. Our findings offer a comprehensive perspective on human motor control, integrating risk management in a hierarchical reinforcement learning framework for real-world environments.
Kunavar, Tjasa; Kroflic, Niko; Jamšek, Marko; Babič, Jan
Influence of video gaming experience on motor adaptation during visuomotor and force field perturbations Journal Article
In: Heliyon, vol. 11, iss. 10, pp. e43109, 2025, ISSN: 24058440.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Kunavar2025,
title = {Influence of video gaming experience on motor adaptation during visuomotor and force field perturbations},
author = {Tjasa Kunavar and Niko Kroflic and Marko Jam\v{s}ek and Jan Babi\v{c}},
doi = {10.1016/j.heliyon.2025.e43109},
issn = {24058440},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Heliyon},
volume = {11},
issue = {10},
pages = {e43109},
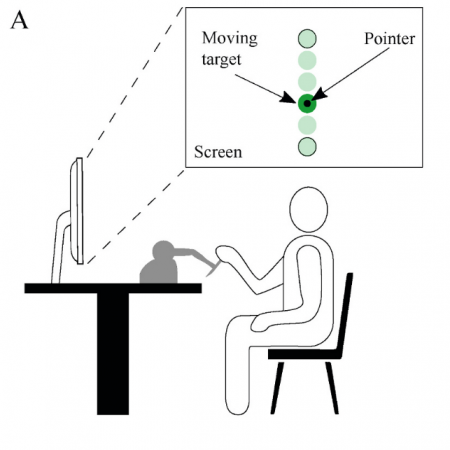
abstract = {The capacity for quick and agile motor adaptations can be enhanced through related previous motor experience. This study explores the influence of prior long-term experience in playing action video games on the ability to adapt to novel motor beha viors. We compared motor adaptation between professional video game players, casual players who play video games on afrequent or infrequent basis, and non-gamers. Participants performed a tracking task where they had to adapt to novel visuomotor perturbation and an arm reaching task where they had to adapt to novel force field perturbation. Results showed that experience with action video games enhanced the process of adapting to novel complex visuomotor perturbation during a tracking task. On the other hand, the gaming experience had no effects on the process of adapting to force field perturbation during an arm reaching task. Since the tasks differ in the type of perturbation (and therefore the type of transformation needed for adaptation), the difficulty of perturbation, and the type of movement performed, the exact reason for the difference in the results should be further investigated. However, our results show that everyday experience with gaming can have an effect on the ability to adapt to certain types of novel motor behaviors. Our findings demonstrate the potential of everyday experiences in rehabilitation and training protocols, but highlight the need to consider the specific types of learning required.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The capacity for quick and agile motor adaptations can be enhanced through related previous motor experience. This study explores the influence of prior long-term experience in playing action video games on the ability to adapt to novel motor beha viors. We compared motor adaptation between professional video game players, casual players who play video games on afrequent or infrequent basis, and non-gamers. Participants performed a tracking task where they had to adapt to novel visuomotor perturbation and an arm reaching task where they had to adapt to novel force field perturbation. Results showed that experience with action video games enhanced the process of adapting to novel complex visuomotor perturbation during a tracking task. On the other hand, the gaming experience had no effects on the process of adapting to force field perturbation during an arm reaching task. Since the tasks differ in the type of perturbation (and therefore the type of transformation needed for adaptation), the difficulty of perturbation, and the type of movement performed, the exact reason for the difference in the results should be further investigated. However, our results show that everyday experience with gaming can have an effect on the ability to adapt to certain types of novel motor behaviors. Our findings demonstrate the potential of everyday experiences in rehabilitation and training protocols, but highlight the need to consider the specific types of learning required.
2024

Kunavar, Tjasa; Jamšek, Marko; Avila-Mireles, Edwin Johnatan; Rueckert, Elmar; Peternel, Luka; Babič, Jan
The Effects of Different Motor Teaching Strategies on Learning a Complex Motor Task Journal Article
In: Sensors, vol. 24, iss. 4, pp. 1231, 2024, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Kunavar2024,
title = {The Effects of Different Motor Teaching Strategies on Learning a Complex Motor Task},
author = {Tjasa Kunavar and Marko Jam\v{s}ek and Edwin Johnatan Avila-Mireles and Elmar Rueckert and Luka Peternel and Jan Babi\v{c}},
doi = {10.3390/s24041231},
issn = {1424-8220},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Sensors},
volume = {24},
issue = {4},
pages = {1231},
abstract = {During the learning of a new sensorimotor task, individuals are usually provided with instructional stimuli and relevant information about the target task. The inclusion of haptic devices in the study of this kind of learning has greatly helped in the understanding of how an individual can improve or acquire new skills. However, the way in which the information and stimuli are delivered has not been extensively explored. We have designed a challenging task with nonintuitive visuomotor perturbation that allows us to apply and compare different motor strategies to study the teaching process and to avoid the interference of previous knowledge present in the na\"{i}ve subjects. Three subject groups participated in our experiment, where the learning by repetition without assistance, learning by repetition with assistance, and task Segmentation Learning techniques were performed with a haptic robot. Our results show that all the groups were able to successfully complete the task and that the subjects’ performance during training and evaluation was not affected by modifying the teaching strategy. Nevertheless, our results indicate that the presented task design is useful for the study of sensorimotor teaching and that the presented metrics are suitable for exploring the evolution of the accuracy and precision during learning.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
During the learning of a new sensorimotor task, individuals are usually provided with instructional stimuli and relevant information about the target task. The inclusion of haptic devices in the study of this kind of learning has greatly helped in the understanding of how an individual can improve or acquire new skills. However, the way in which the information and stimuli are delivered has not been extensively explored. We have designed a challenging task with nonintuitive visuomotor perturbation that allows us to apply and compare different motor strategies to study the teaching process and to avoid the interference of previous knowledge present in the naïve subjects. Three subject groups participated in our experiment, where the learning by repetition without assistance, learning by repetition with assistance, and task Segmentation Learning techniques were performed with a haptic robot. Our results show that all the groups were able to successfully complete the task and that the subjects’ performance during training and evaluation was not affected by modifying the teaching strategy. Nevertheless, our results indicate that the presented task design is useful for the study of sensorimotor teaching and that the presented metrics are suitable for exploring the evolution of the accuracy and precision during learning.
White, Olivier; Dehouck, Victor; Boulanger, Nicolas; Dierick, Frédéric; Babič, Jan; Goswami, Nandu; Buisseret, Fabien
Resonance tuning of rhythmic movements is disrupted at short time scales: A centrifuge study Journal Article
In: iScience, vol. 27, iss. 5, pp. 109618, 2024, ISSN: 25890042.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning | Links:
@article{White2024,
title = {Resonance tuning of rhythmic movements is disrupted at short time scales: A centrifuge study},
author = {Olivier White and Victor Dehouck and Nicolas Boulanger and Fr\'{e}d\'{e}ric Dierick and Jan Babi\v{c} and Nandu Goswami and Fabien Buisseret},
doi = {10.1016/j.isci.2024.109618},
issn = {25890042},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {iScience},
volume = {27},
issue = {5},
pages = {109618},
abstract = {The human body exploits its neural mechanisms to optimize actions. Rhythmic movements are optimal when their frequency is close to the natural frequency of the system. In a pendulum, gravity modulates this spontaneous frequency. Participants unconsciously adjust their natural pace when cyclically moving the arm in altered gravity. However, the timescale of this adaptation is unexplored. Participants per- formed cyclic movements before, during, and after fast transitions between hypergravity levels (1g\textendash3g and 3g\textendash1g) induced by a human centrifuge. Movement periods were modulated with the average value of gravity during transitions. However, while participants increased movement pace on a cycle basis when gravity increased (1g\textendash3g), they did not decrease pace when gravity decreased (3g\textendash1g). We highlight asymmetric effects in the spontaneous adjustment of movement dynamics on short timescales, suggest- ing the involvement of cognitive factors, beyond standard dynamical models.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The human body exploits its neural mechanisms to optimize actions. Rhythmic movements are optimal when their frequency is close to the natural frequency of the system. In a pendulum, gravity modulates this spontaneous frequency. Participants unconsciously adjust their natural pace when cyclically moving the arm in altered gravity. However, the timescale of this adaptation is unexplored. Participants per- formed cyclic movements before, during, and after fast transitions between hypergravity levels (1g–3g and 3g–1g) induced by a human centrifuge. Movement periods were modulated with the average value of gravity during transitions. However, while participants increased movement pace on a cycle basis when gravity increased (1g–3g), they did not decrease pace when gravity decreased (3g–1g). We highlight asymmetric effects in the spontaneous adjustment of movement dynamics on short timescales, suggest- ing the involvement of cognitive factors, beyond standard dynamical models.
Sorrentino, Riccardo G.; Avila‐Mireles, Edwin Johnatan; Babič, Jan; Supej, Matej; Mekjavic, Igor B.; McDonnell, Adam C.
Comparison of joint kinematics between upright front squat exercise and horizontal squat exercise performed on a short arm human centrifugation Journal Article
In: Physiological Reports, vol. 12, iss. 13, 2024, ISSN: 2051-817X.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Sorrentino2024,
title = {Comparison of joint kinematics between upright front squat exercise and horizontal squat exercise performed on a short arm human centrifugation},
author = {Riccardo G. Sorrentino and Edwin Johnatan Avila‐Mireles and Jan Babi\v{c} and Matej Supej and Igor B. Mekjavic and Adam C. McDonnell},
doi = {10.14814/phy2.16034},
issn = {2051-817X},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Physiological Reports},
volume = {12},
issue = {13},
abstract = {This study compared the joint kinematics between the front squat (FS) conducted in the upright (natural gravity) position and in the supine position on a short arm human centrifuge (SAHC). Male participants ( \<italic\>N\</italic\> = 12) with no prior experience exercising on a centrifuge completed a FS in the upright position before (PRE) and after (POST) a FS exercise conducted on the SAHC while exposed to artificial gravity (AG). Participants completed, in randomized order, three sets of six repetitions with a load equal to body weight or 1.25 × body weight for upright squats, and 1 g and 1.25 g at the center of gravity (COG) for AG. During the terrestrial squats, the load was applied with a barbell. Knee (left/right) and hip (left/right) flexion angles were recorded with a set of inertial measurement units. AG decreased the maximum flexion angle (MAX) of knees and hips as well as the range of motion (ROM), both at 1 and 1.25 g. Minor adaptation was observed between the first and the last repetition performed in AG. AG affects the ability to FS in na\"{i}ve participants by reducing MAX, MIN and ROM of the knees and hip.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
This study compared the joint kinematics between the front squat (FS) conducted in the upright (natural gravity) position and in the supine position on a short arm human centrifuge (SAHC). Male participants ( <italic>N</italic> = 12) with no prior experience exercising on a centrifuge completed a FS in the upright position before (PRE) and after (POST) a FS exercise conducted on the SAHC while exposed to artificial gravity (AG). Participants completed, in randomized order, three sets of six repetitions with a load equal to body weight or 1.25 × body weight for upright squats, and 1 g and 1.25 g at the center of gravity (COG) for AG. During the terrestrial squats, the load was applied with a barbell. Knee (left/right) and hip (left/right) flexion angles were recorded with a set of inertial measurement units. AG decreased the maximum flexion angle (MAX) of knees and hips as well as the range of motion (ROM), both at 1 and 1.25 g. Minor adaptation was observed between the first and the last repetition performed in AG. AG affects the ability to FS in naïve participants by reducing MAX, MIN and ROM of the knees and hip.
2022
Takahashi, Chie; Azad, Morteza; Rajasekaran, Vijaykumar; Babič, Jan; Mistry, Michael
Human Stiffness Perception and Learning in Interacting With Compliant Environments Journal Article
In: Frontiers in Neuroscience, vol. 16, no. June, pp. 1–13, 2022, ISSN: 1662-453X.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Takahashi2022,
title = {Human Stiffness Perception and Learning in Interacting With Compliant Environments},
author = {Chie Takahashi and Morteza Azad and Vijaykumar Rajasekaran and Jan Babi\v{c} and Michael Mistry},
url = {https://www.frontiersin.org/articles/10.3389/fnins.2022.841901/full},
doi = {10.3389/fnins.2022.841901},
issn = {1662-453X},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
journal = {Frontiers in Neuroscience},
volume = {16},
number = {June},
pages = {1--13},
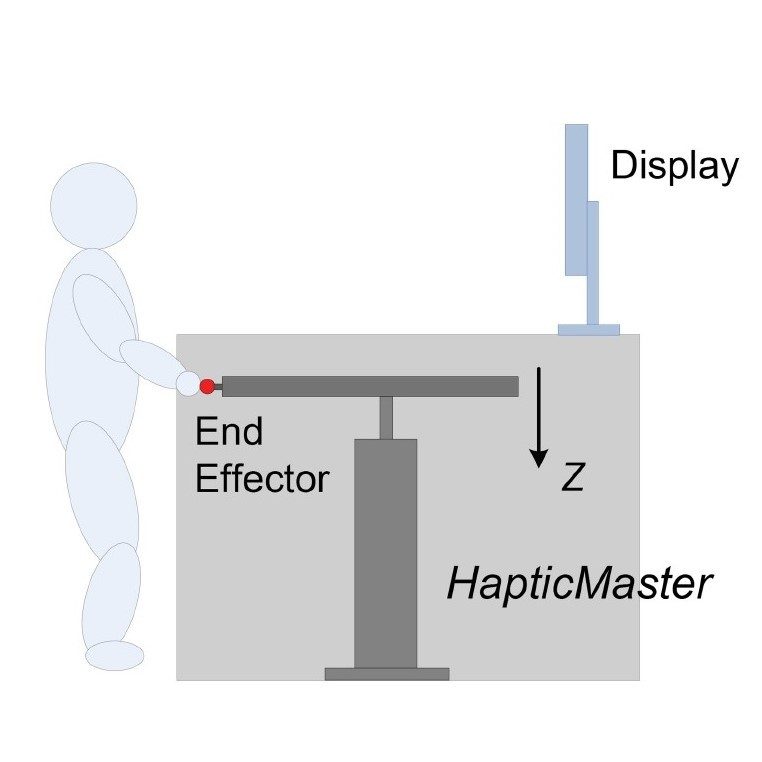
abstract = {Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.},
keywords = {Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.
Monany, D. Rannaud; Barbiero, M.; Lebon, F.; Babič, Jan; Blohm, G.; Nozaki, D.; White, O.
Motor imagery helps updating internal models during microgravity exposure Journal Article
In: Journal of Neurophysiology, vol. 127, no. 2, pp. 434–443, 2022, ISSN: 0022-3077.
Abstract | BibTeX | Tags: Human Motor Control, Sensorimotor Learning | Links:
@article{RannaudMonany2022,
title = {Motor imagery helps updating internal models during microgravity exposure},
author = {D. Rannaud Monany and M. Barbiero and F. Lebon and Jan Babi\v{c} and G. Blohm and D. Nozaki and O. White},
url = {https://journals.physiology.org/doi/10.1152/jn.00214.2021},
doi = {10.1152/jn.00214.2021},
issn = {0022-3077},
year = {2022},
date = {2022-02-01},
urldate = {2022-02-01},
journal = {Journal of Neurophysiology},
volume = {127},
number = {2},
pages = {434--443},
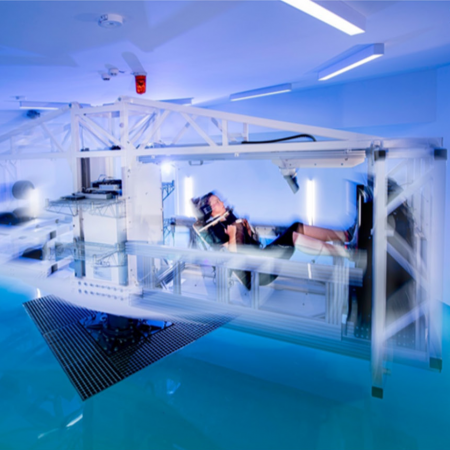
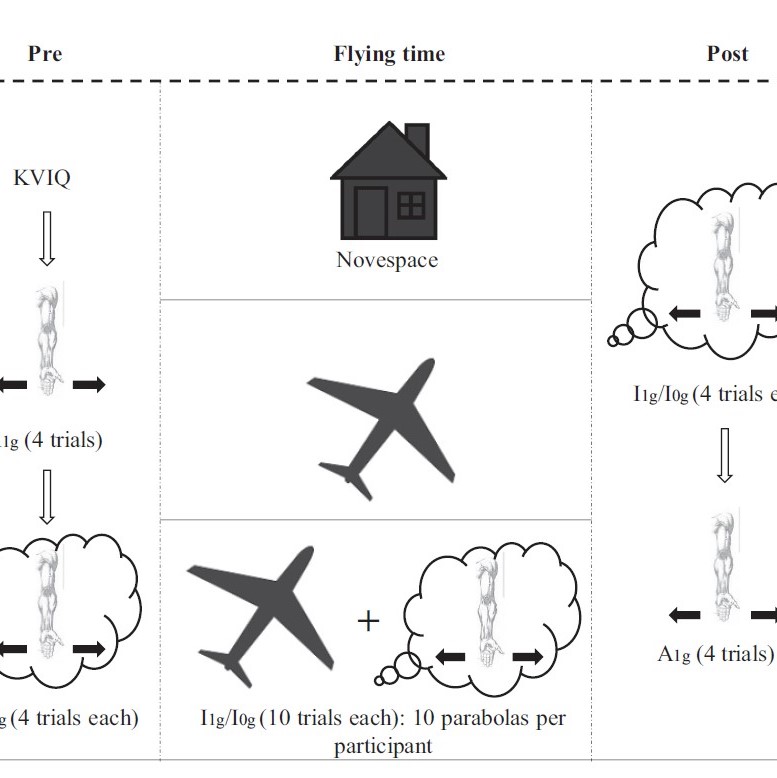
abstract = {Gravity strongly affects the way movements are performed. How internal models process this information to adapt behavior to novel contexts is still unknown. The microgravity environment itself does not provide enough information to optimally adjust the period of natural arm swinging movements to microgravity. However, motor imagery of the task while immersed in microgravity was sufficient to update internal models. These results show that actually executing a task is not necessary to update graviception.},
keywords = {Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Gravity strongly affects the way movements are performed. How internal models process this information to adapt behavior to novel contexts is still unknown. The microgravity environment itself does not provide enough information to optimally adjust the period of natural arm swinging movements to microgravity. However, motor imagery of the task while immersed in microgravity was sufficient to update internal models. These results show that actually executing a task is not necessary to update graviception.
2021

Kunavar, Tjaša; Jamšek, Marko; Barbiero, Marie; Blohm, Gunnar; Nozaki, Daichi; Papaxanthis, Charalambos; White, Olivier; Babič, Jan
Effects of Local Gravity Compensation on Motor Control During Altered Environmental Gravity Journal Article
In: Frontiers in Neural Circuits, vol. 15, 2021, ISSN: 1662-5110.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning | Links:
@article{Kunavar2021,
title = {Effects of Local Gravity Compensation on Motor Control During Altered Environmental Gravity},
author = {Tja\v{s}a Kunavar and Marko Jam\v{s}ek and Marie Barbiero and Gunnar Blohm and Daichi Nozaki and Charalambos Papaxanthis and Olivier White and Jan Babi\v{c}},
url = {https://www.frontiersin.org/articles/10.3389/fncir.2021.750267/full},
doi = {10.3389/fncir.2021.750267},
issn = {1662-5110},
year = {2021},
date = {2021-10-01},
urldate = {2021-10-01},
journal = {Frontiers in Neural Circuits},
volume = {15},
abstract = {Our sensorimotor control is well adapted to normogravity environment encountered on Earth and any change in gravity significantly disturbs our movement. In order to produce appropriate motor commands for aimed arm movements such as pointing or reaching, environmental changes have to be taken into account. This adaptation is crucial when performing successful movements during microgravity and hypergravity conditions. To mitigate the effects of changing gravitational levels, such as the changed movement duration and decreased accuracy, we explored the possible beneficial effects of gravity compensation on movement. Local gravity compensation was achieved using a motorized robotic device capable of applying precise forces to the subject's wrist that generated a normogravity equivalent torque at the shoulder joint during periods of microgravity and hypergravity. The efficiency of the local gravity compensation was assessed with an experiment in which participants performed a series of pointing movements toward the target on a screen during a parabolic flight. We compared movement duration, accuracy, movement trajectory, and muscle activations of movements during periods of microgravity and hypergravity with conditions when local gravity compensation was provided. The use of local gravity compensation at the arm mitigated the changes in movement duration, accuracy, and muscle activity. Our results suggest that the use of such an assistive device helps with movements during unfamiliar environmental gravity.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Our sensorimotor control is well adapted to normogravity environment encountered on Earth and any change in gravity significantly disturbs our movement. In order to produce appropriate motor commands for aimed arm movements such as pointing or reaching, environmental changes have to be taken into account. This adaptation is crucial when performing successful movements during microgravity and hypergravity conditions. To mitigate the effects of changing gravitational levels, such as the changed movement duration and decreased accuracy, we explored the possible beneficial effects of gravity compensation on movement. Local gravity compensation was achieved using a motorized robotic device capable of applying precise forces to the subject's wrist that generated a normogravity equivalent torque at the shoulder joint during periods of microgravity and hypergravity. The efficiency of the local gravity compensation was assessed with an experiment in which participants performed a series of pointing movements toward the target on a screen during a parabolic flight. We compared movement duration, accuracy, movement trajectory, and muscle activations of movements during periods of microgravity and hypergravity with conditions when local gravity compensation was provided. The use of local gravity compensation at the arm mitigated the changes in movement duration, accuracy, and muscle activity. Our results suggest that the use of such an assistive device helps with movements during unfamiliar environmental gravity.
Arditi, Emir; Kunavar, Tjaša; Ugur, Emre; Babič, Jan; Oztop, Erhan
Inferring Cost Functions Using Reward Parameter Search and Policy Gradient Reinforcement Learning Proceedings Article
In: IECON 2021 – 47th Annual Conference of the IEEE Industrial Electronics Society, pp. 1–6, IEEE, 2021, ISBN: 978-1-6654-3554-3.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning | Links:
@inproceedings{Arditi2021,
title = {Inferring Cost Functions Using Reward Parameter Search and Policy Gradient Reinforcement Learning},
author = {Emir Arditi and Tja\v{s}a Kunavar and Emre Ugur and Jan Babi\v{c} and Erhan Oztop},
url = {https://ieeexplore.ieee.org/document/9589967/},
doi = {10.1109/IECON48115.2021.9589967},
isbn = {978-1-6654-3554-3},
year = {2021},
date = {2021-10-01},
urldate = {2021-10-01},
booktitle = {IECON 2021 \textendash 47th Annual Conference of the IEEE Industrial Electronics Society},
pages = {1--6},
publisher = {IEEE},
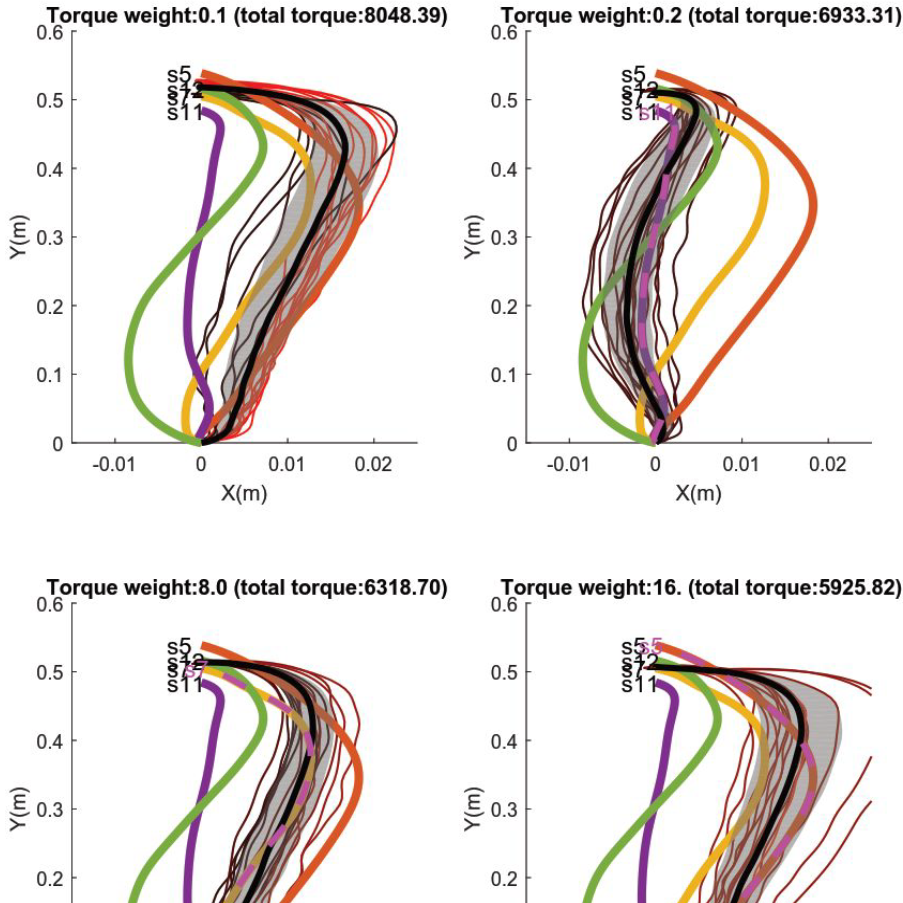
abstract = {This study focuses on inferring cost functions of obtained movement data using reward parameter search and pol-icy gradient based Reinforcement Learning (RL). The behavior data for this task is obtained through a series of squat-to-stand movements of human participants under dynamic perturbations. The key parameter searched in the cost function is the weight of total torque used in performing the squat-to-stand action. An approximate model is used to learn squat-to-stand movements via a policy gradient method, namely Proximal Policy Optimization(PPO). A behavioral similarity metric based on Center of Mass(COM) is used to find the most likely weight parameter. The stochasticity in the training result of PPO is dealt with multiple runs, and as a result, a reasonable and a stable Inverse Reinforcement Learning(IRL) algorithm is obtained in terms of performance. The results indicate that for some participants, the reward function parameters of the experts were inferred successfully.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
This study focuses on inferring cost functions of obtained movement data using reward parameter search and pol-icy gradient based Reinforcement Learning (RL). The behavior data for this task is obtained through a series of squat-to-stand movements of human participants under dynamic perturbations. The key parameter searched in the cost function is the weight of total torque used in performing the squat-to-stand action. An approximate model is used to learn squat-to-stand movements via a policy gradient method, namely Proximal Policy Optimization(PPO). A behavioral similarity metric based on Center of Mass(COM) is used to find the most likely weight parameter. The stochasticity in the training result of PPO is dealt with multiple runs, and as a result, a reasonable and a stable Inverse Reinforcement Learning(IRL) algorithm is obtained in terms of performance. The results indicate that for some participants, the reward function parameters of the experts were inferred successfully.

Jamšek, Marko; Kunavar, Tjaša; Blohm, Gunnar; Nozaki, Daichi; Papaxanthis, Charalambos; White, Olivier; Babič, Jan
Effects of Simulated Microgravity and Hypergravity Conditions on Arm Movements in Normogravity Journal Article
In: Frontiers in Neural Circuits, vol. 15, pp. 150, 2021, ISSN: 1662-5110.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning | Links:
@article{10.3389/fncir.2021.750176,
title = {Effects of Simulated Microgravity and Hypergravity Conditions on Arm Movements in Normogravity},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Gunnar Blohm and Daichi Nozaki and Charalambos Papaxanthis and Olivier White and Jan Babi\v{c}},
url = {https://www.frontiersin.org/article/10.3389/fncir.2021.750176},
doi = {10.3389/fncir.2021.750176},
issn = {1662-5110},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Frontiers in Neural Circuits},
volume = {15},
pages = {150},
abstract = {The human sensorimotor control has evolved in the Earth's environment where all movement is influenced by the gravitational force. Changes in this environmental force can severely impact the performance of arm movements which can be detrimental in completing certain tasks such as piloting or controlling complex vehicles. For this reason, subjects that are required to perform such tasks undergo extensive training procedures in order to minimize the chances of failure. We investigated whether local gravity simulation of altered gravitational conditions on the arm would lead to changes in kinematic parameters comparable to the full-body experience of microgravity and hypergravity onboard a parabolic flight. To see if this would be a feasible approach for on-ground training of arm reaching movements in altered gravity conditions we developed a robotic device that was able to apply forces at the wrist in order to simulate micro- or hypergravity conditions for the arm while subjects performed pointing movements on a touch screen. We analyzed and compared the results of several kinematic parameters along with muscle activity using this system with data of the same subjects being fully exposed to microgravity and hypergravity conditions on a parabolic flight. Both in our simulation and in-flight, we observed a significant increase in movement durations in microgravity conditions and increased velocities in hypergravity for upward movements. Additionally, we noted a reduced accuracy of pointing both in-flight and in our simulation. These promising results suggest, that locally simulated altered gravity can elicit similar changes in some movement characteristics for arm reaching movements. This could potentially be exploited as a means of developing devices such as exoskeletons to aid in training individuals prior to undertaking tasks in changed gravitational conditions.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The human sensorimotor control has evolved in the Earth's environment where all movement is influenced by the gravitational force. Changes in this environmental force can severely impact the performance of arm movements which can be detrimental in completing certain tasks such as piloting or controlling complex vehicles. For this reason, subjects that are required to perform such tasks undergo extensive training procedures in order to minimize the chances of failure. We investigated whether local gravity simulation of altered gravitational conditions on the arm would lead to changes in kinematic parameters comparable to the full-body experience of microgravity and hypergravity onboard a parabolic flight. To see if this would be a feasible approach for on-ground training of arm reaching movements in altered gravity conditions we developed a robotic device that was able to apply forces at the wrist in order to simulate micro- or hypergravity conditions for the arm while subjects performed pointing movements on a touch screen. We analyzed and compared the results of several kinematic parameters along with muscle activity using this system with data of the same subjects being fully exposed to microgravity and hypergravity conditions on a parabolic flight. Both in our simulation and in-flight, we observed a significant increase in movement durations in microgravity conditions and increased velocities in hypergravity for upward movements. Additionally, we noted a reduced accuracy of pointing both in-flight and in our simulation. These promising results suggest, that locally simulated altered gravity can elicit similar changes in some movement characteristics for arm reaching movements. This could potentially be exploited as a means of developing devices such as exoskeletons to aid in training individuals prior to undertaking tasks in changed gravitational conditions.
2020
Kunavar, Tjaša; Čamernik, Jernej; Kawato, Mitsuo; Oztop, Erhan; Babič, Jan
Failure as a reinforcement in motor learning Proceedings Article
In: Workshop on Mechanism of Brain and Mind 2020, Rusutsu, Japan, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2020,
title = { Failure as a reinforcement in motor learning},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Mitsuo Kawato and Erhan Oztop and Jan Babi\v{c}},
year = {2020},
date = {2020-01-04},
booktitle = {Workshop on Mechanism of Brain and Mind 2020},
address = {Rusutsu, Japan},
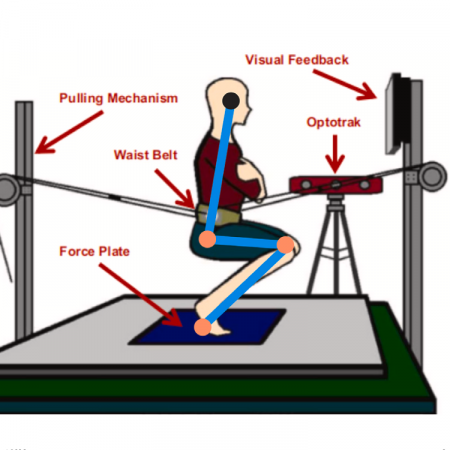
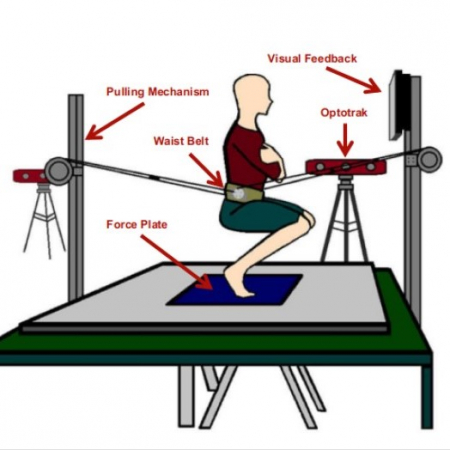
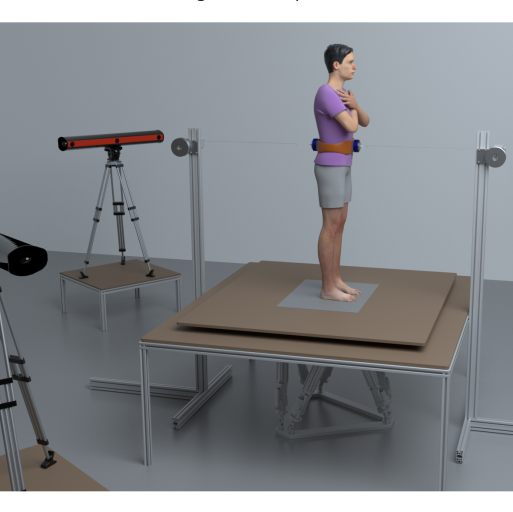
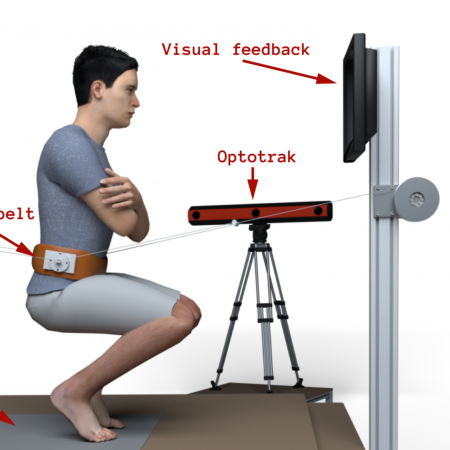
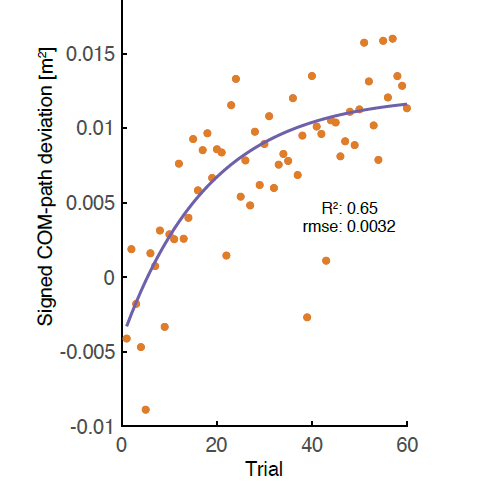
abstract = {Humans initiate movements and actions to satisfy their needs and secure their survival. It is therefore necessary to understand motor learning in terms of ecological fitness, where behaviour that produces desired result gets reinforced. We investigated whether failure can work as an ecological reinforcement. An experimental paradigm for observing sensorimotor control was used to study human motion in terms of ecological fitness. This type of approach allowed us to take into account the risk of injury as a reinforcement mechanism. Series of squat to stand motions were performed by participants. Backward perturbation to the centre of mass (COM) was applied by a waist pulling mechanism. Participants managed to gradually adapt to perturbation. When perturbation was present, there was a displacement in the anterior direction, caused by adaptation to perturbation. Motor behaviour was adapted following a failed outcome, while the motor behaviour that produced a successful result was retained.},
keywords = {Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Humans initiate movements and actions to satisfy their needs and secure their survival. It is therefore necessary to understand motor learning in terms of ecological fitness, where behaviour that produces desired result gets reinforced. We investigated whether failure can work as an ecological reinforcement. An experimental paradigm for observing sensorimotor control was used to study human motion in terms of ecological fitness. This type of approach allowed us to take into account the risk of injury as a reinforcement mechanism. Series of squat to stand motions were performed by participants. Backward perturbation to the centre of mass (COM) was applied by a waist pulling mechanism. Participants managed to gradually adapt to perturbation. When perturbation was present, there was a displacement in the anterior direction, caused by adaptation to perturbation. Motor behaviour was adapted following a failed outcome, while the motor behaviour that produced a successful result was retained.

Galli, G.; Cakmak, Y. O.; Babič, Jan; Pazzaglia, M.
Editorial: Embodying Tool Use: From Cognition to Neurorehabilitation Journal Article
In: Frontiers in Human Neuroscience, vol. 14, 2020, ISSN: 16625161.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Galli2020,
title = {Editorial: Embodying Tool Use: From Cognition to Neurorehabilitation},
author = {G. Galli and Y. O. Cakmak and Jan Babi\v{c} and M. Pazzaglia},
doi = {10.3389/fnhum.2020.585670},
issn = {16625161},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {14},
abstract = {This Research Topic collects an impressive body ofliterature on “Embodying Tool Use.” Overall, the contributions extend and enrich the previous multidisciplinary approach and translational applications. However, despite the significant progress made in our understanding and the real-world relevance, there are boundless directions, endless possibilities, and exciting challenges yet to be explored in future research.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
This Research Topic collects an impressive body ofliterature on “Embodying Tool Use.” Overall, the contributions extend and enrich the previous multidisciplinary approach and translational applications. However, despite the significant progress made in our understanding and the real-world relevance, there are boundless directions, endless possibilities, and exciting challenges yet to be explored in future research.
Čamernik, Jernej; Kezić, Sanja; Babič, Jan
Impact of the virtual-height exposure on human psychophysical parameters Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 87, no. 5, pp. 267–274, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Camernik2020,
title = {Impact of the virtual-height exposure on human psychophysical parameters},
author = {Jernej \v{C}amernik and Sanja Kezi\'{c} and Jan Babi\v{c}},
url = {https://ev.fe.uni-lj.si/5-2020/Camernik.pdf},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {87},
number = {5},
pages = {267--274},
abstract = {The study evaluates the impact of the virtual height on the human postural control by analyzing the human physiological and psychological responses. Combining the virtual reality and a robotic platform, an environment is created in which a human is seemingly raised to a height of three meters, to affect the human's multi-sensory perception of a movement in the space, causing or enhancing the human's psychophysical responses to an environment at change. A short test is made to monitor the postural control of 20 volunteers during an event of a simultaneous sudden jerk of a robotic platform and a visual change in the height. The data are recorded before and after the event and the results are compared. Using force-plates and an optical system for capturing the volunteer's movement, the movements of forces on the ground and the volunteer's body mass (COP and COM) are observed. Their average values, average power spectrum frequency (MPF) and the root mean square values (RMS) are analyzed. Before and after a virtual rise, the state of the volunteer's current and general perception of anxiety is evaluated with a questionnaire to determine their level of anxiety, electrodermal activity (EDA) and skinsurface temperature. It is shown, that immediately after the volunteer's exposure to a virtual height, their anxiety, fear, skin conductivity and average frequency spectrum of the COP and COM movement increase and their stability, confidence, temperature and RMS values of COP and COM decrease. The volunteer's physiological response to their height perception is also reflected in the change in the mean values of the COP and COM movement in the anterior-posterior direction after they lean backwards, i.e. away from the edge, immediately after lifting. Our study results show that changes in the human emotional and physiological state, as a consequence of a postural threat, and simultaneously also an increase in the human postural control, occur even in humans who are not afraid of the height.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The study evaluates the impact of the virtual height on the human postural control by analyzing the human physiological and psychological responses. Combining the virtual reality and a robotic platform, an environment is created in which a human is seemingly raised to a height of three meters, to affect the human's multi-sensory perception of a movement in the space, causing or enhancing the human's psychophysical responses to an environment at change. A short test is made to monitor the postural control of 20 volunteers during an event of a simultaneous sudden jerk of a robotic platform and a visual change in the height. The data are recorded before and after the event and the results are compared. Using force-plates and an optical system for capturing the volunteer's movement, the movements of forces on the ground and the volunteer's body mass (COP and COM) are observed. Their average values, average power spectrum frequency (MPF) and the root mean square values (RMS) are analyzed. Before and after a virtual rise, the state of the volunteer's current and general perception of anxiety is evaluated with a questionnaire to determine their level of anxiety, electrodermal activity (EDA) and skinsurface temperature. It is shown, that immediately after the volunteer's exposure to a virtual height, their anxiety, fear, skin conductivity and average frequency spectrum of the COP and COM movement increase and their stability, confidence, temperature and RMS values of COP and COM decrease. The volunteer's physiological response to their height perception is also reflected in the change in the mean values of the COP and COM movement in the anterior-posterior direction after they lean backwards, i.e. away from the edge, immediately after lifting. Our study results show that changes in the human emotional and physiological state, as a consequence of a postural threat, and simultaneously also an increase in the human postural control, occur even in humans who are not afraid of the height.
2019
Peternel, Luka; Babič, Jan
Target of initial sub-movement in multi-component arm-reaching strategy Journal Article
In: Scientific Reports, vol. 9, no. 1, pp. 20101, 2019, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning | Links:
@article{Peternel2019,
title = {Target of initial sub-movement in multi-component arm-reaching strategy},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://www.nature.com/articles/s41598-019-56430-x},
doi = {10.1038/s41598-019-56430-x},
issn = {2045-2322},
year = {2019},
date = {2019-12-01},
urldate = {2019-12-01},
journal = {Scientific Reports},
volume = {9},
number = {1},
pages = {20101},
abstract = {Goal-directed human reaching often involves multi-component strategy with sub-movements. in general, the initial sub-movement is fast and less precise to bring the limb's endpoint in the vicinity of the target as soon as possible. The final sub-movement then corrects the error accumulated during the previous sub-movement in order to reach the target. We investigate properties of a temporary target of the initial sub-movement. We hypothesise that the peak spatial dispersion of movement trajectories in the axis perpendicular to the movement is in front of the final reaching target, and that it indicates the temporary target of the initial sub-movement. the reasoning is that the dispersion accumulates, due to signal-dependent noise during the initial sub-movement, until the final corrective sub-movement is initiated, which then reduces the dispersion to successfully reach the actual target. We also hypothesise that the reaching movement distance and size of the actual target affect the properties of the temporary target of the initial sub-movement. the increased reaching movement distance increases the magnitude of peak dispersion and moves its location away from the actual target. on the other hand, the increased target size increases the magnitude of peak dispersion and moves its location closer to the actual target.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Goal-directed human reaching often involves multi-component strategy with sub-movements. in general, the initial sub-movement is fast and less precise to bring the limb's endpoint in the vicinity of the target as soon as possible. The final sub-movement then corrects the error accumulated during the previous sub-movement in order to reach the target. We investigate properties of a temporary target of the initial sub-movement. We hypothesise that the peak spatial dispersion of movement trajectories in the axis perpendicular to the movement is in front of the final reaching target, and that it indicates the temporary target of the initial sub-movement. the reasoning is that the dispersion accumulates, due to signal-dependent noise during the initial sub-movement, until the final corrective sub-movement is initiated, which then reduces the dispersion to successfully reach the actual target. We also hypothesise that the reaching movement distance and size of the actual target affect the properties of the temporary target of the initial sub-movement. the increased reaching movement distance increases the magnitude of peak dispersion and moves its location away from the actual target. on the other hand, the increased target size increases the magnitude of peak dispersion and moves its location closer to the actual target.
Kunavar, Tjaša; Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Characteristics of human whole body motor learning Proceedings Article
In: Turkey Robotics Conference, TORK 2019, Özyegin University, Istanbul, 2019.
Abstract | BibTeX | Tags: Dynamic Motion, Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2019b,
title = { Characteristics of human whole body motor learning},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2019},
date = {2019-06-01},
booktitle = {Turkey Robotics Conference, TORK 2019},
address = {\"{O}zyegin University, Istanbul},
abstract = {Human whole body movement was observed in order to better understand how humans are able to learn motion and adapt to perturbation. This paper presents preliminary results of our experiment and a simple dynamic model that can simulate motion trajectories.},
keywords = {Dynamic Motion, Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Human whole body movement was observed in order to better understand how humans are able to learn motion and adapt to perturbation. This paper presents preliminary results of our experiment and a simple dynamic model that can simulate motion trajectories.
Kunavar, Tjaša; Čamernik, Jernej; Babič, Jan; Oztop, Erhan; Kawato, Mitsuo
Does danger of injury influence human motor adaptation? Proceedings Article
In: Workshop on Mechanism of Brain and Mind 2019, Rusutsu, Japan, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2019a,
title = { Does danger of injury influence human motor adaptation?},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Jan Babi\v{c} and Erhan Oztop and Mitsuo Kawato},
year = {2019},
date = {2019-01-06},
booktitle = {Workshop on Mechanism of Brain and Mind 2019},
address = {Rusutsu, Japan},
abstract = {Experimental paradigm for observing sensorimotor control was used to study human whole body motion. It made a step forward from arm-reaching studies to studying movements of the whole human body. Twenty male participants performed a series of squat to stand motions. Following a baseline block, backward perturbation to the centre of mass (COM) was applied by a pulling mechanism. Participants' aim was to successfully stand up. To assess adaptation of motion, the effect of perturbation was quantified using the trajectory area at every trial. Participants managed to gradually adapt to perturbation and significantly decrease the occurrence of failed trials by increasing their trajectory area. Preliminary results show that safety is an important part of motor adaptation process.},
keywords = {Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Experimental paradigm for observing sensorimotor control was used to study human whole body motion. It made a step forward from arm-reaching studies to studying movements of the whole human body. Twenty male participants performed a series of squat to stand motions. Following a baseline block, backward perturbation to the centre of mass (COM) was applied by a pulling mechanism. Participants' aim was to successfully stand up. To assess adaptation of motion, the effect of perturbation was quantified using the trajectory area at every trial. Participants managed to gradually adapt to perturbation and significantly decrease the occurrence of failed trials by increasing their trajectory area. Preliminary results show that safety is an important part of motor adaptation process.

White, Olivier; Babič, Jan; Trenado, Carlos; Johannsen, Leif; Goswami, Nandu
The Promise of Stochastic Resonance in Falls Prevention Journal Article
In: Frontiers in Physiology, vol. 9, no. January, pp. 1–12, 2019, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning | Links:
@article{White2019,
title = {The Promise of Stochastic Resonance in Falls Prevention},
author = {Olivier White and Jan Babi\v{c} and Carlos Trenado and Leif Johannsen and Nandu Goswami},
url = {https://www.frontiersin.org/article/10.3389/fphys.2018.01865/full},
doi = {10.3389/fphys.2018.01865},
issn = {1664-042X},
year = {2019},
date = {2019-01-01},
journal = {Frontiers in Physiology},
volume = {9},
number = {January},
pages = {1--12},
abstract = {Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.
Avila-Mireles, Edwin Johnatan; Abidi, Haider; D'Imperio, Mariapaola; Scaccia, Massimiliano; Liberini, Paolo; Caldwell, Darwin G.; Cannella, Ferdinando
Study of Patients Self-Training Influence on Peripheral Neuropathies Diseases Diagnosis through D.I.T.A Device Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, pp. 5435-5438, 2019, ISSN: 1557170X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Avila-Mireles2019,
title = {Study of Patients Self-Training Influence on Peripheral Neuropathies Diseases Diagnosis through D.I.T.A Device},
author = {Edwin Johnatan Avila-Mireles and Haider Abidi and Mariapaola D'Imperio and Massimiliano Scaccia and Paolo Liberini and Darwin G. Caldwell and Ferdinando Cannella},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=8856599},
doi = {10.1109/EMBC.2019.8856599},
issn = {1557170X},
year = {2019},
date = {2019-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
pages = {5435-5438},
publisher = {IEEE},
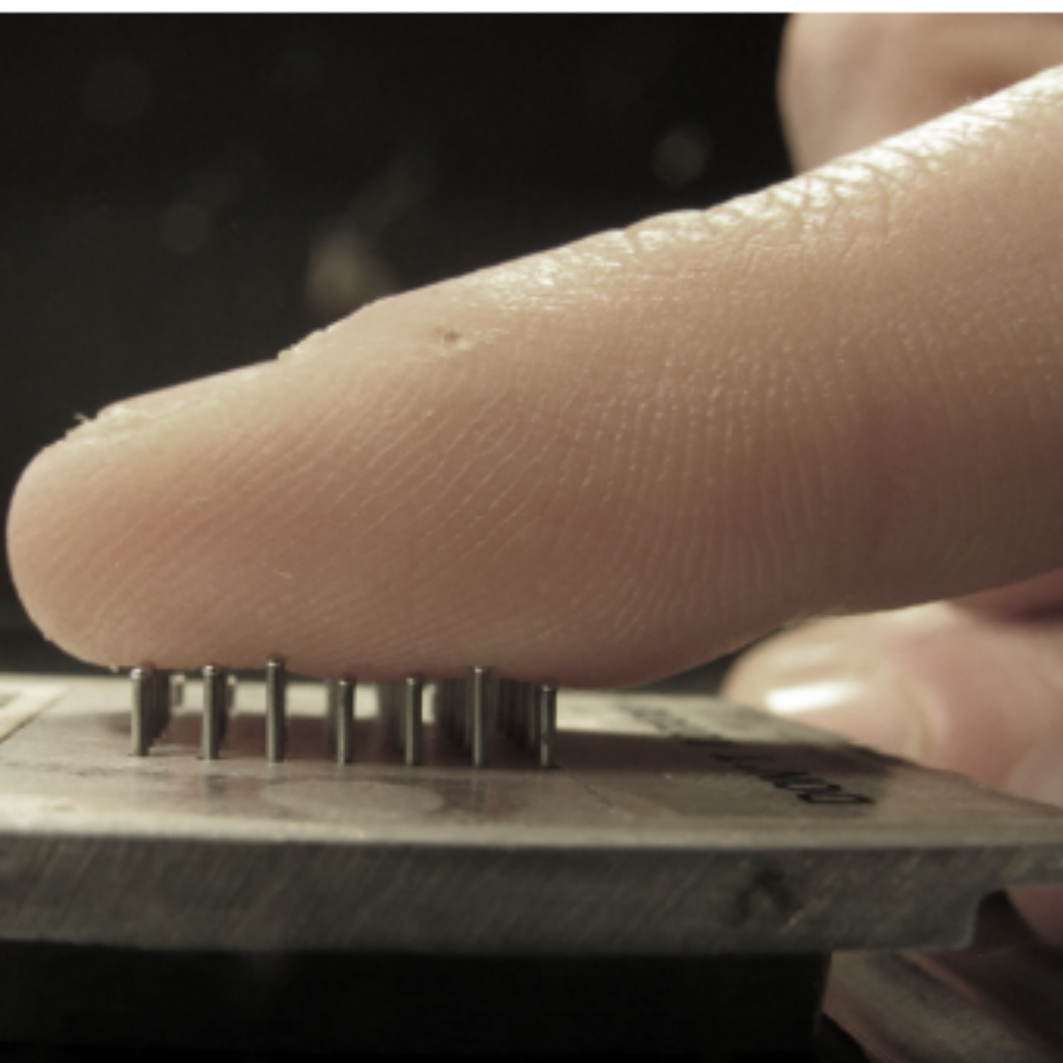
abstract = {In our daily life, the sight and the sense of touch play a fundamental role in objects recognitions. This process is helped by the experience: if a subject has already seen or already touched an object in the past, he will recognize it more easily in the future. Following this assumption, the authors of this paper wanted to investigate if the experience can influence the results of a clinical examination where the subject has an active role. The attention was focused on the peripheral neuropathies diagnosis since they require an accurate assessment of several parameters including the tactile sensitivity trend. In other words, if the tests encompass an active role of the subjects, one of the main uncertainties is the self-training that influences the subject responses. This work focuses on the study of this self-training using the D.I.T.A device (Dynamic Investigation Test-rig on hAptics). Results clearly show a fundamental role of priming during 'haptic modality': expert subjects, previously experienced with the tests, demonstrated better recognition of the encountered stimuli, compared to novices. Moreover, the results show that the maximum difference between the two groups of subjects is in the first part of the test. An ANOVA analysis was carried out to demonstrate that also the errors between the pins-arrays are affected by the priming.},
keywords = {Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In our daily life, the sight and the sense of touch play a fundamental role in objects recognitions. This process is helped by the experience: if a subject has already seen or already touched an object in the past, he will recognize it more easily in the future. Following this assumption, the authors of this paper wanted to investigate if the experience can influence the results of a clinical examination where the subject has an active role. The attention was focused on the peripheral neuropathies diagnosis since they require an accurate assessment of several parameters including the tactile sensitivity trend. In other words, if the tests encompass an active role of the subjects, one of the main uncertainties is the self-training that influences the subject responses. This work focuses on the study of this self-training using the D.I.T.A device (Dynamic Investigation Test-rig on hAptics). Results clearly show a fundamental role of priming during 'haptic modality': expert subjects, previously experienced with the tests, demonstrated better recognition of the encountered stimuli, compared to novices. Moreover, the results show that the maximum difference between the two groups of subjects is in the first part of the test. An ANOVA analysis was carried out to demonstrate that also the errors between the pins-arrays are affected by the priming.
Arditi, Emir; Čamernik, Jernej; Babič, Jan; Ugur, Emre; Nagai, Yukie; Oztop, Erhan
Explorations on inverse reinforcement learning for the analysis of sensorimotor data Proceedings Article
In: Winter Workshop on Mechanism of Brain and Mind 2019, Rusutsu, 9.-11.1. 2019, Rusutsu, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Machine Learning, Sensorimotor Learning
@inproceedings{Arditi2019,
title = {Explorations on inverse reinforcement learning for the analysis of sensorimotor data},
author = {Emir Arditi and Jernej \v{C}amernik and Jan Babi\v{c} and Emre Ugur and Yukie Nagai and Erhan Oztop},
year = {2019},
date = {2019-01-01},
booktitle = {Winter Workshop on Mechanism of Brain and Mind 2019, Rusutsu, 9.-11.1. 2019},
address = {Rusutsu},
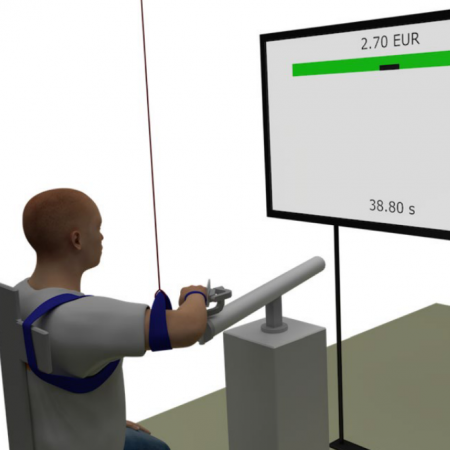
abstract = {We set out to explore whether recent Reinforcement Learning methods can serve as a computational tool for investigating optimality principles of motor control and cognitive decision making mechanisms of the brain. For this purpose, we have targeted two different tasks. One includes full body motion which involves possibility of injury and fall; whereas the other involves playing a simple computer game requiring prediction and fast decision making. If we can recover optimality principles employed by the brain for various control and decision making tasks, we can analyse experimental data with less bias, and hope to gain more insights than possible with classical methods.},
keywords = {Human Motor Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We set out to explore whether recent Reinforcement Learning methods can serve as a computational tool for investigating optimality principles of motor control and cognitive decision making mechanisms of the brain. For this purpose, we have targeted two different tasks. One includes full body motion which involves possibility of injury and fall; whereas the other involves playing a simple computer game requiring prediction and fast decision making. If we can recover optimality principles employed by the brain for various control and decision making tasks, we can analyse experimental data with less bias, and hope to gain more insights than possible with classical methods.
2018
Teramae, Tatsuya; Ishihara, Koji; Babič, Jan; Morimoto, Jun; Oztop, Erhan
Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots Journal Article
In: Frontiers in Neurorobotics, vol. 12, pp. 71, 2018, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Teramae2018,
title = {Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots},
author = {Tatsuya Teramae and Koji Ishihara and Jan Babi\v{c} and Jun Morimoto and Erhan Oztop},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2018.00071/full},
doi = {10.3389/fnbot.2018.00071},
issn = {1662-5218},
year = {2018},
date = {2018-11-01},
journal = {Frontiers in Neurorobotics},
volume = {12},
pages = {71},
publisher = {Frontiers},
abstract = {Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.

Petrič, Tadej; Cevzar, Mišel; Babič, Jan
Shared Control for Human-Robot Cooperative Manipulation Tasks Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 787–796, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@incollection{Petric2018,
title = {Shared Control for Human-Robot Cooperative Manipulation Tasks},
author = {Tadej Petri\v{c} and Mi\v{s}el Cevzar and Jan Babi\v{c}},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_83},
doi = {10.1007/978-3-319-61276-8_83},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {787--796},
publisher = {Springer International Publishing},
address = {Cham},
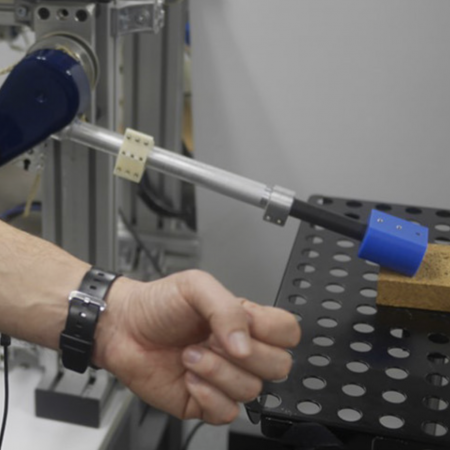
abstract = {In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.},
keywords = {Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.
Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Understanding Human Adaptation in Squat-to-Stand movements Proceedings Article
In: 2018 Türkiye Robotbilim Konferansi, TORK 2018, pp. 245–247, Istanbul, 2018.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning
@inproceedings{Camernik2018,
title = {Understanding Human Adaptation in Squat-to-Stand movements},
author = {Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2018},
date = {2018-01-01},
booktitle = {2018 T\"{u}rkiye Robotbilim Konferansi, TORK 2018},
pages = {245--247},
address = {Istanbul},
abstract = {We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.
Čamernik, Jernej; Rueckert, Elmar; Oztop, Erhan; Babič, Jan
Configurable dynamical environment simulation platform for studies of whole- body motor control and learning Proceedings Article
In: Congress programme, 8th World Congress of Biomechanics, 8-12 July 2018, Dublin, Ireland, Dublin, 2018.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning
@inproceedings{\v{C}amernik2018a,
title = {Configurable dynamical environment simulation platform for studies of whole- body motor control and learning},
author = {Jernej \v{C}amernik and Elmar Rueckert and Erhan Oztop and Jan Babi\v{c}},
year = {2018},
date = {2018-01-01},
booktitle = {Congress programme, 8th World Congress of Biomechanics, 8-12 July 2018, Dublin, Ireland},
address = {Dublin},
abstract = {We propose an experimental paradigm with which we aim to replicate force field experiments in reaching studies by using full body motion and applying force controlled perturbation directly to the subject’s centre-of-mass. With our specific experimental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to danger of falling and injury. The two main components of our setup include a custom made force-controlled pulling mechanism and a 6 degrees-of-freedom position controlled Stewart platform. Both devices can be used either individually or simultaneously for inducing full body perturbations and/or reducing the effects of perturbation. To test our setup, we conducted a pilot study where subjects had to perform a series of squat-to-stand movements. By methodologically applying perturbations directly to their centre-of-mass, we created an environment where danger and energy consumption is critical. Preliminary results show that our experimental setup can be used for directly studying full-body motor control and learning.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose an experimental paradigm with which we aim to replicate force field experiments in reaching studies by using full body motion and applying force controlled perturbation directly to the subject’s centre-of-mass. With our specific experimental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to danger of falling and injury. The two main components of our setup include a custom made force-controlled pulling mechanism and a 6 degrees-of-freedom position controlled Stewart platform. Both devices can be used either individually or simultaneously for inducing full body perturbations and/or reducing the effects of perturbation. To test our setup, we conducted a pilot study where subjects had to perform a series of squat-to-stand movements. By methodologically applying perturbations directly to their centre-of-mass, we created an environment where danger and energy consumption is critical. Preliminary results show that our experimental setup can be used for directly studying full-body motor control and learning.
2017
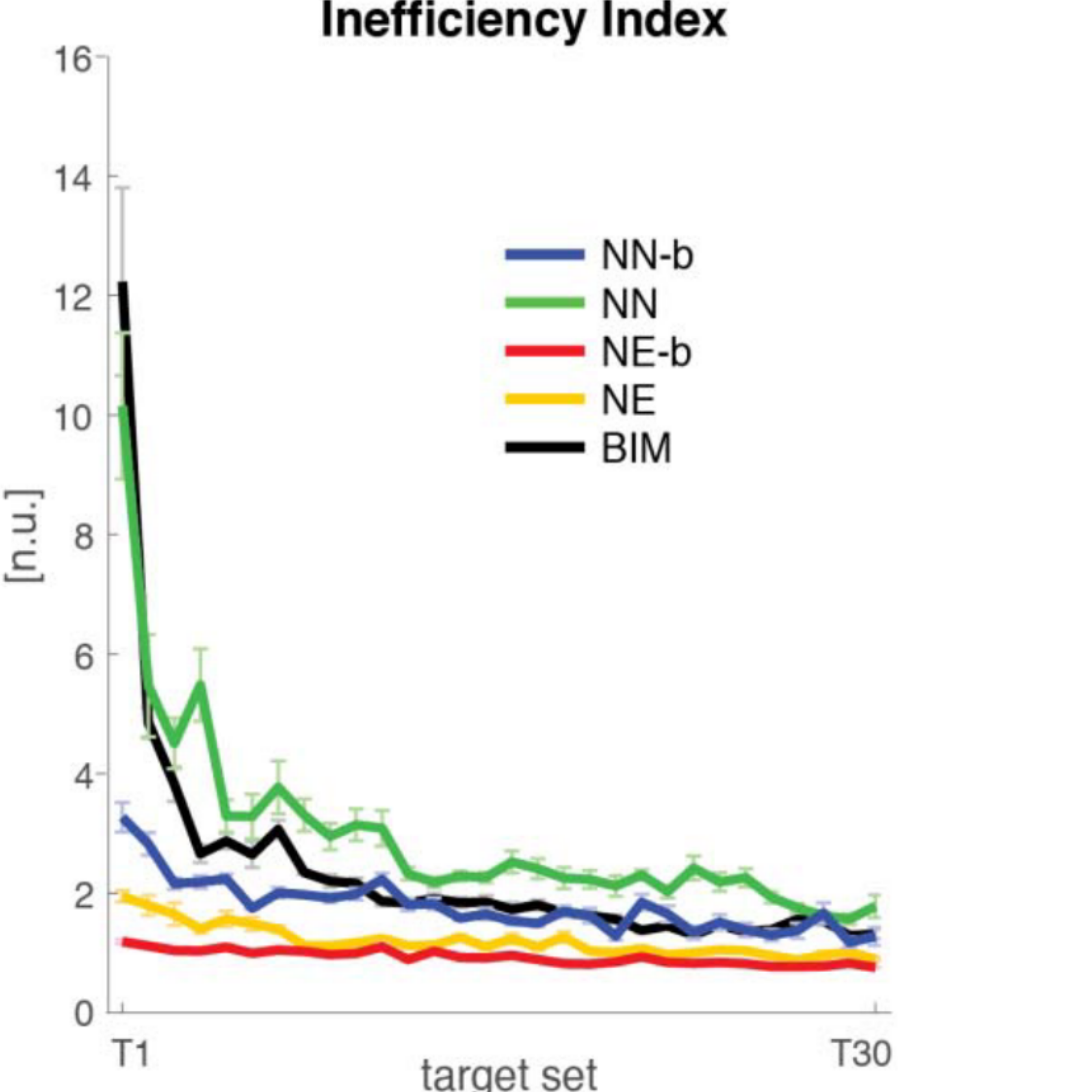
Avila-Mireles, Edwin Johnatan; Zenzeri, Jacopo; Squeri, Valentina; Morasso, Pietro; Santis, Dalia De
Skill learning and skill transfer mediated by cooperative haptic interaction Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, no. 7, pp. 832-843, 2017, ISSN: 15344320.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2017b,
title = {Skill learning and skill transfer mediated by cooperative haptic interaction},
author = {Edwin Johnatan Avila-Mireles and Jacopo Zenzeri and Valentina Squeri and Pietro Morasso and Dalia {De Santis}},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7921690; volume = 25},
doi = {10.1109/TNSRE.2017.2700839},
issn = {15344320},
year = {2017},
date = {2017-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
number = {7},
pages = {832-843},
abstract = {It is known that physical coupling between two subjects may be advantageous in joint tasks. However, little is known about how two people mutually exchange information to exploit the coupling. Therefore we adopted a reversed, novel perspective to the standard one that focuses on the ability of physically coupled subjects to adapt to cooperative contexts that require negotiating a common plan: we investigated how training in pairs on a novel task affects the development of motor skills of each of the interacting partners. The task involved reaching movements in an unstable dynamic environment using a bilateral non-linear elastic tool that could be used bimanually or dyadically. The main result is that training with an expert leads to the greatest performance in the joint task. However, the performance in the individual test is strongly affected by the initial skill level of the partner. Moreover, practicing with a peer rather than an expert appears to be more advantageous for a naive; and motor skills can be transferred to a bimanual context, after training with an expert, only if the non-expert subject had prior experience of the dynamics of the novel task.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
It is known that physical coupling between two subjects may be advantageous in joint tasks. However, little is known about how two people mutually exchange information to exploit the coupling. Therefore we adopted a reversed, novel perspective to the standard one that focuses on the ability of physically coupled subjects to adapt to cooperative contexts that require negotiating a common plan: we investigated how training in pairs on a novel task affects the development of motor skills of each of the interacting partners. The task involved reaching movements in an unstable dynamic environment using a bilateral non-linear elastic tool that could be used bimanually or dyadically. The main result is that training with an expert leads to the greatest performance in the joint task. However, the performance in the individual test is strongly affected by the initial skill level of the partner. Moreover, practicing with a peer rather than an expert appears to be more advantageous for a naive; and motor skills can be transferred to a bimanual context, after training with an expert, only if the non-expert subject had prior experience of the dynamics of the novel task.
2016
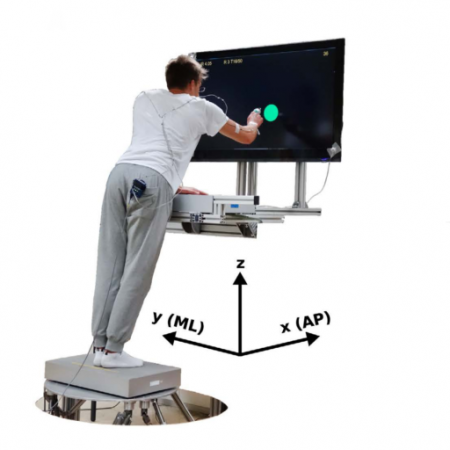
Rueckert, Elmar; Čamernik, Jernej; Peters, Jan; Babič, Jan
Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control Journal Article
In: Scientific Reports, vol. 6, no. 1, pp. 28455, 2016, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning | Links:
@article{Rueckert2016,
title = {Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control},
author = {Elmar Rueckert and Jernej \v{C}amernik and Jan Peters and Jan Babi\v{c}},
url = {http://www.nature.com/articles/srep28455},
doi = {10.1038/srep28455},
issn = {2045-2322},
year = {2016},
date = {2016-09-01},
journal = {Scientific Reports},
volume = {6},
number = {1},
pages = {28455},
publisher = {Nature Publishing Group},
abstract = {Human motor skill learning is driven by the necessity to adapt to new situations. While supportive contacts are essential for many tasks, little is known about their impact on motor learning. To study the effect of contacts an innovative full-body experimental paradigm was established. The task of the subjects was to reach for a distant target while postural stability could only be maintained by establishing an additional supportive hand contact. To examine adaptation, non-trivial postural perturbations of the subjects' support base were systematically introduced. A novel probabilistic trajectory model approach was employed to analyze the correlation between the motions of both arms and the trunk. We found that subjects adapted to the perturbations by establishing target dependent hand contacts. Moreover, we found that the trunk motion adapted significantly faster than the motion of the arms. However, the most striking finding was that observations of the initial phase of the left arm or trunk motion (100-400 ms) were sufficient to faithfully predict the complete movement of the right arm. Overall, our results suggest that the goal-directed arm movements determine the supportive arm motions and that the motion of heavy body parts adapts faster than the light arms.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Human motor skill learning is driven by the necessity to adapt to new situations. While supportive contacts are essential for many tasks, little is known about their impact on motor learning. To study the effect of contacts an innovative full-body experimental paradigm was established. The task of the subjects was to reach for a distant target while postural stability could only be maintained by establishing an additional supportive hand contact. To examine adaptation, non-trivial postural perturbations of the subjects' support base were systematically introduced. A novel probabilistic trajectory model approach was employed to analyze the correlation between the motions of both arms and the trunk. We found that subjects adapted to the perturbations by establishing target dependent hand contacts. Moreover, we found that the trunk motion adapted significantly faster than the motion of the arms. However, the most striking finding was that observations of the initial phase of the left arm or trunk motion (100-400 ms) were sufficient to faithfully predict the complete movement of the right arm. Overall, our results suggest that the goal-directed arm movements determine the supportive arm motions and that the motion of heavy body parts adapts faster than the light arms.
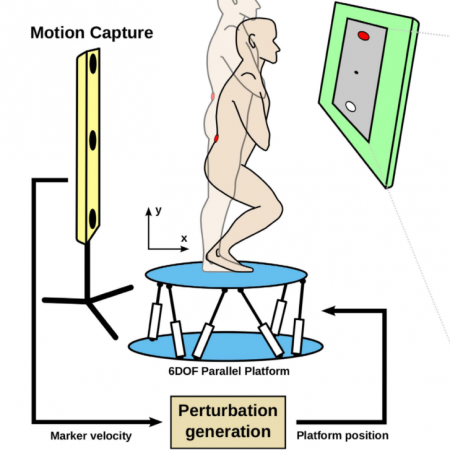
Babič, Jan; Oztop, Erhan; Kawato, Mitsuo
Human motor adaptation in whole body motion Journal Article
In: Scientific Reports, vol. 6, no. 1, pp. 32868, 2016, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Babic2016,
title = {Human motor adaptation in whole body motion},
author = {Jan Babi\v{c} and Erhan Oztop and Mitsuo Kawato},
url = {http://www.nature.com/articles/srep32868},
doi = {10.1038/srep32868},
issn = {2045-2322},
year = {2016},
date = {2016-01-01},
journal = {Scientific Reports},
volume = {6},
number = {1},
pages = {32868},
publisher = {Nature Publishing Group},
abstract = {The main role of the sensorimotor system of an organism is to increase the survival of the species. Therefore, to understand the adaptation and optimality mechanisms of motor control, it is necessary to study the sensorimotor system in terms of ecological fitness. We designed an experimental paradigm that exposed sensorimotor system to risk of injury. We studied human subjects performing uncon- strained squat-to-stand movements that were systematically subjected to non-trivial perturbation. We found that subjects adapted by actively compensating the perturbations, converging to movements that were different from their normal unperturbed squat-to-stand movements. Furthermore, the adapted movements had clear intrinsic inter-subject differences which could be explained by different adapta- tion strategies employed by the subjects. These results suggest that classical optimality measures of physical energy and task satisfaction should be seen as part of a hierarchical organization of optimality with safety being at the highest level. Therefore, in addition to physical energy and task fulfillment, the risk of injury and other possible costs such as neural computational overhead have to be considered when analyzing human movement.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The main role of the sensorimotor system of an organism is to increase the survival of the species. Therefore, to understand the adaptation and optimality mechanisms of motor control, it is necessary to study the sensorimotor system in terms of ecological fitness. We designed an experimental paradigm that exposed sensorimotor system to risk of injury. We studied human subjects performing uncon- strained squat-to-stand movements that were systematically subjected to non-trivial perturbation. We found that subjects adapted by actively compensating the perturbations, converging to movements that were different from their normal unperturbed squat-to-stand movements. Furthermore, the adapted movements had clear intrinsic inter-subject differences which could be explained by different adapta- tion strategies employed by the subjects. These results suggest that classical optimality measures of physical energy and task satisfaction should be seen as part of a hierarchical organization of optimality with safety being at the highest level. Therefore, in addition to physical energy and task fulfillment, the risk of injury and other possible costs such as neural computational overhead have to be considered when analyzing human movement.
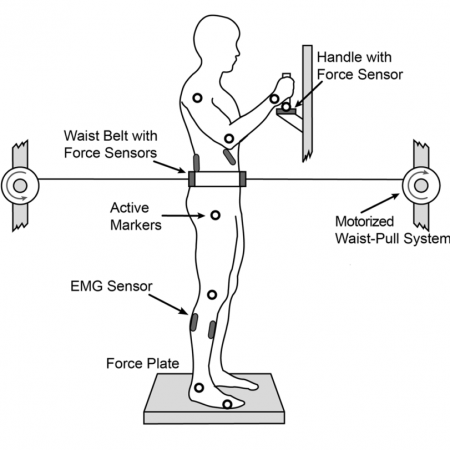
Čamernik, Jernej; Potočanac, Zrinka; Peternel, Luka; Babič, Jan
Holding a Handle for Balance during Continuous Postural Perturbations—Immediate and Transitionary Effects on Whole Body Posture Journal Article
In: Frontiers in Human Neuroscience, vol. 10, pp. 486, 2016, ISSN: 1662-5161.
Abstract | BibTeX | Tags: Ergonomy, Postural Balance, Sensorimotor Learning | Links:
@article{Camernik2016,
title = {Holding a Handle for Balance during Continuous Postural Perturbations\textemdashImmediate and Transitionary Effects on Whole Body Posture},
author = {Jernej \v{C}amernik and Zrinka Poto\v{c}anac and Luka Peternel and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fnhum.2016.00486},
doi = {10.3389/fnhum.2016.00486},
issn = {1662-5161},
year = {2016},
date = {2016-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {10},
pages = {486},
publisher = {Frontiers},
abstract = {When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.},
keywords = {Ergonomy, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.
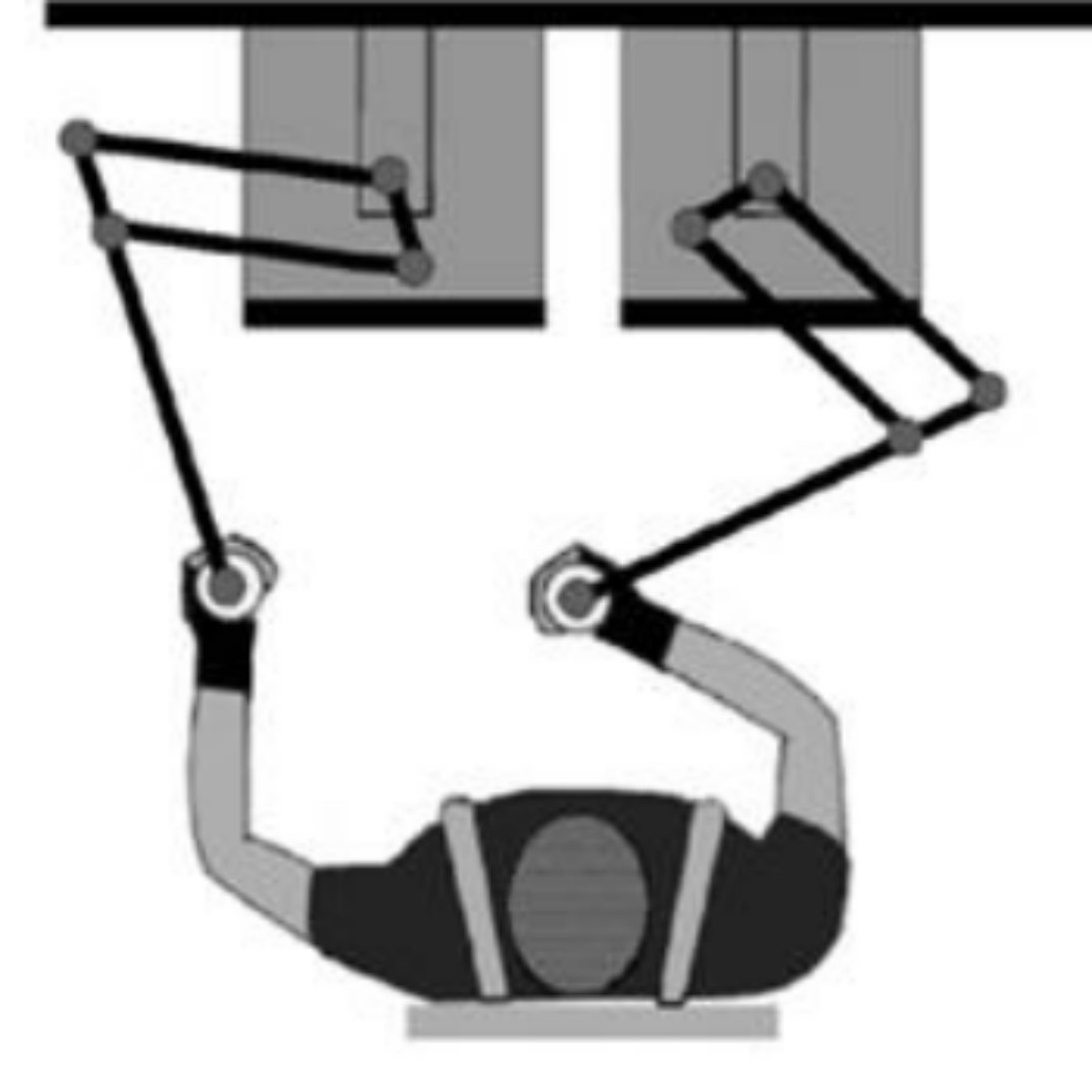
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Morasso, Pietro; Zenzeri, Jacopo
Transferring knowledge during dyadic interaction: The role of the expert in the learning process Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2016-Octob, pp. 2149-2152, 2016, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2016g,
title = {Transferring knowledge during dyadic interaction: The role of the expert in the learning process},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7591154},
doi = {10.1109/EMBC.2016.7591154},
issn = {1557170X},
year = {2016},
date = {2016-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2016-Octob},
pages = {2149-2152},
abstract = {Physical interaction between man and machines is increasing the interest of the research as well as the industrial community. It is known that physical coupling between active persons can be beneficial and increase the performance of the dyad compared to an individual. However, the factors that may result in performance benefits are still poorly understood. The aim of this work is to investigate how the different initial skill levels of the interacting partners influence the learning of a stabilization task. Twelve subjects, divided in two groups, trained in couples in a joint stabilization task. In the first group the couples were composed of two naive, while in the second a naive was trained together with an expert. Results show that training with an expert results in the greatest performance in the joint task. However, this benefit is not transferred to the individual when performing the same task bimanually.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Physical interaction between man and machines is increasing the interest of the research as well as the industrial community. It is known that physical coupling between active persons can be beneficial and increase the performance of the dyad compared to an individual. However, the factors that may result in performance benefits are still poorly understood. The aim of this work is to investigate how the different initial skill levels of the interacting partners influence the learning of a stabilization task. Twelve subjects, divided in two groups, trained in couples in a joint stabilization task. In the first group the couples were composed of two naive, while in the second a naive was trained together with an expert. Results show that training with an expert results in the greatest performance in the joint task. However, this benefit is not transferred to the individual when performing the same task bimanually.
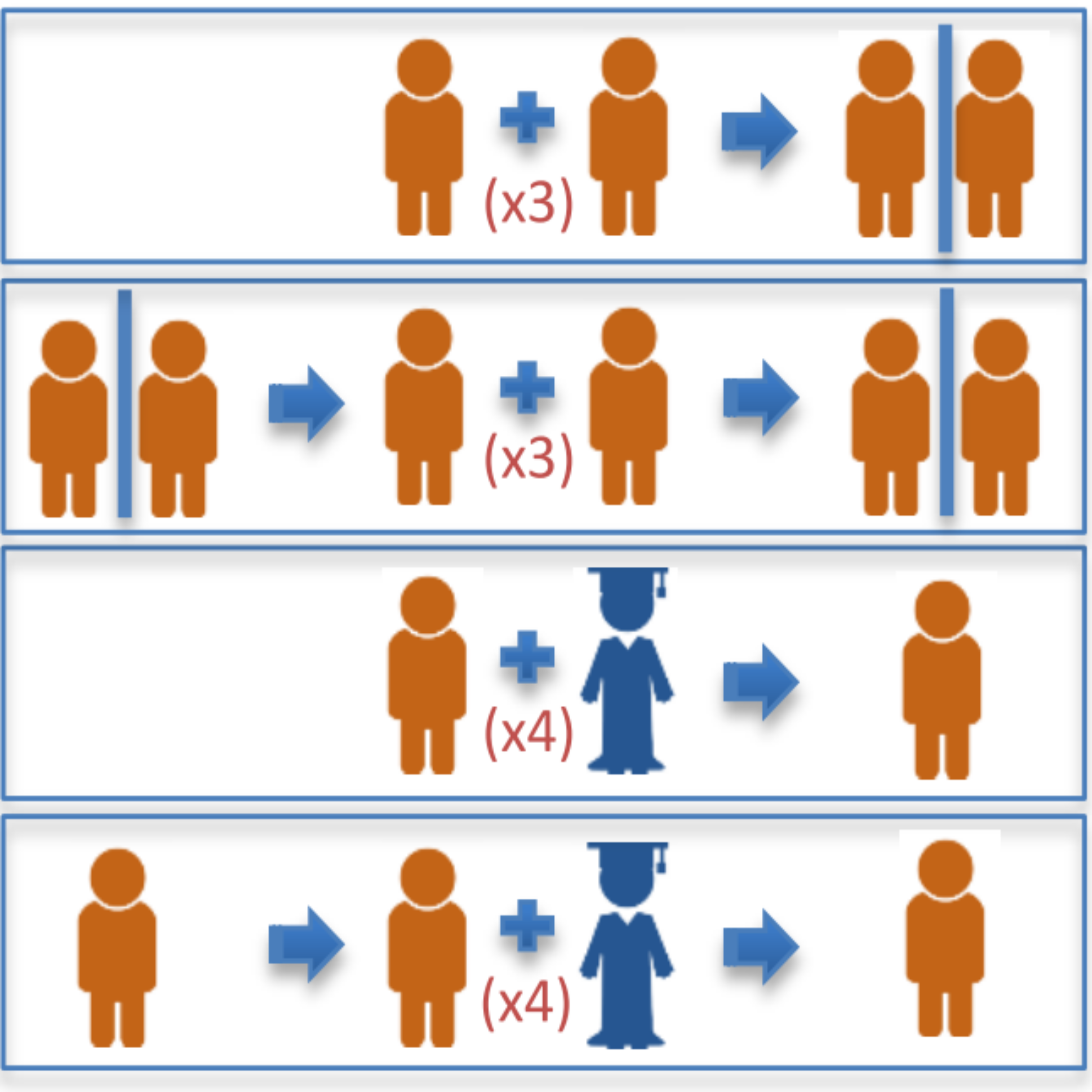
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Skill transfer and generalization after robot - mediated dyadic training Journal Article
In: Human Friendly Robotics, no. Human - Robot Interaction, pp. 1-6, 2016.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning
@article{Avila-Mireles2016h,
title = {Skill transfer and generalization after robot - mediated dyadic training},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
year = {2016},
date = {2016-01-01},
journal = {Human Friendly Robotics},
number = {Human - Robot Interaction},
pages = {1-6},
abstract = {Several studies have investigated how the interaction between two people or between a person and a robot can be harnessed to improve the skills of the partners. Indeed, solving a task as a dyad can lead the individual to perform better than by himself. The goal of this work is to investigate how the skill level of the partner and different interactive conditions affect learning of a novel task. In particular we considered the case of partners with different initial skill level (na\"{i}ve or experts) and the influence of prior individual practice. Twenty two subjects trained in a joint stabilization task for 4 days. On the last day we tested their ability to perform the same task individually. The results show that training with a skilled partner, despite bringing to a faster learning in the joint task, does not facilitate skill transfer in the absence of individual prior practice. This suggests that the physical coupling with an expert partner may interfere with learning due to the formation of a non-veridical internal representation of the task},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Several studies have investigated how the interaction between two people or between a person and a robot can be harnessed to improve the skills of the partners. Indeed, solving a task as a dyad can lead the individual to perform better than by himself. The goal of this work is to investigate how the skill level of the partner and different interactive conditions affect learning of a novel task. In particular we considered the case of partners with different initial skill level (naïve or experts) and the influence of prior individual practice. Twenty two subjects trained in a joint stabilization task for 4 days. On the last day we tested their ability to perform the same task individually. The results show that training with a skilled partner, despite bringing to a faster learning in the joint task, does not facilitate skill transfer in the absence of individual prior practice. This suggests that the physical coupling with an expert partner may interfere with learning due to the formation of a non-veridical internal representation of the task
2015
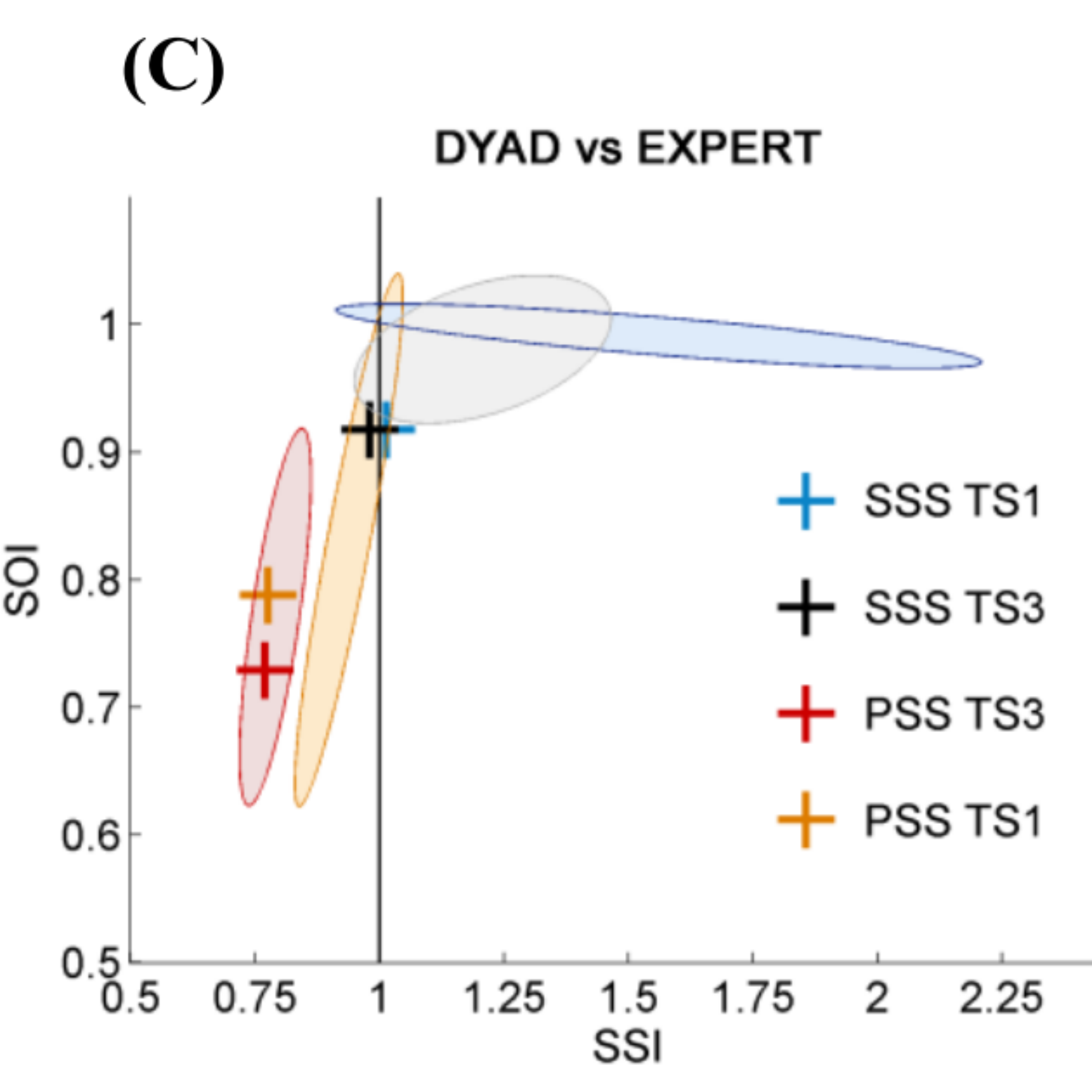
Santis, Dalia De; Avila-Mireles, Edwin Johnatan; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Dealing with instability in bimanual and collaborative tasks Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2015-Novem, no. i, pp. 1417-1420, 2015, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{DeSantis2015a,
title = {Dealing with instability in bimanual and collaborative tasks},
author = {Dalia {De Santis} and Edwin Johnatan Avila-Mireles and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7318635},
doi = {10.1109/EMBC.2015.7318635},
issn = {1557170X},
year = {2015},
date = {2015-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2015-Novem},
number = {i},
pages = {1417-1420},
publisher = {IEEE},
abstract = {In the context of unstable tasks, whenever the dynamics of the interaction are unknown, our ability to control an object depends on the predictability of the sensory feedback generated from the physical coupling at the interface with the object. In the case of physical human-human interaction, the haptic sensory feedback plays a primary role in the construction of a shared motor plan, being the channel for the mutual sharing of intentions. The present work addresses the issue of strategy selection in contexts in which instability is arising both from the environment, i.e. controlling a compliant object subject to nonlinear forces, and from the interaction with a partner, i.e. carrying out a bimanual balancing task in the presence of disturbing force-fields.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In the context of unstable tasks, whenever the dynamics of the interaction are unknown, our ability to control an object depends on the predictability of the sensory feedback generated from the physical coupling at the interface with the object. In the case of physical human-human interaction, the haptic sensory feedback plays a primary role in the construction of a shared motor plan, being the channel for the mutual sharing of intentions. The present work addresses the issue of strategy selection in contexts in which instability is arising both from the environment, i.e. controlling a compliant object subject to nonlinear forces, and from the interaction with a partner, i.e. carrying out a bimanual balancing task in the presence of disturbing force-fields.
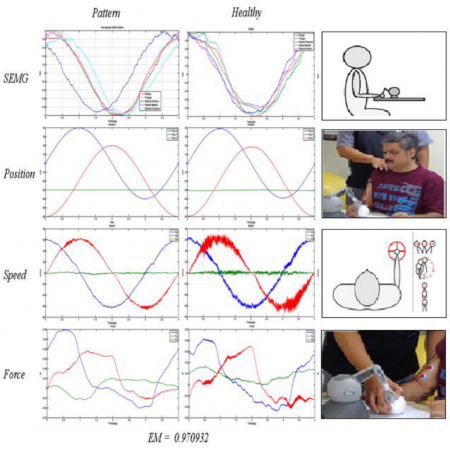
Avila-Mireles, Edwin Johnatan; Ruiz-sánchez, Francisco J
Haptically Induced EMG Patterns for Upper Limb Neuromuscular Evaluation Journal Article
In: Proceedings of 17th International Conference of the Engineering in Medicine and Biology Society, vol. 43, pp. 2012, 2015.
Abstract | BibTeX | Tags: Physical Human Robot Interaction, Sensorimotor Learning
@article{Avila-Mireles2015a,
title = {Haptically Induced EMG Patterns for Upper Limb Neuromuscular Evaluation},
author = {Edwin Johnatan Avila-Mireles and Francisco J Ruiz-s\'{a}nchez},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Proceedings of 17th International Conference of the Engineering in Medicine and Biology Society},
volume = {43},
pages = {2012},
abstract = {In this paper, we present the upper-limb sEMG signals induced by a kinesthetic stimulation, provided by a haptic device in a guiding mode, with cyclic movements on the transverse plane. We show the existence of common patterns of muscular activation in healthy volunteers describing the desired sequence of signals to produce an appropriated and coordinated movement. These patterns introduce physiological information about the etiology of the movement, and a mean to improve the assessment of the neuromuscular state in a patient.},
keywords = {Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In this paper, we present the upper-limb sEMG signals induced by a kinesthetic stimulation, provided by a haptic device in a guiding mode, with cyclic movements on the transverse plane. We show the existence of common patterns of muscular activation in healthy volunteers describing the desired sequence of signals to produce an appropriated and coordinated movement. These patterns introduce physiological information about the etiology of the movement, and a mean to improve the assessment of the neuromuscular state in a patient.
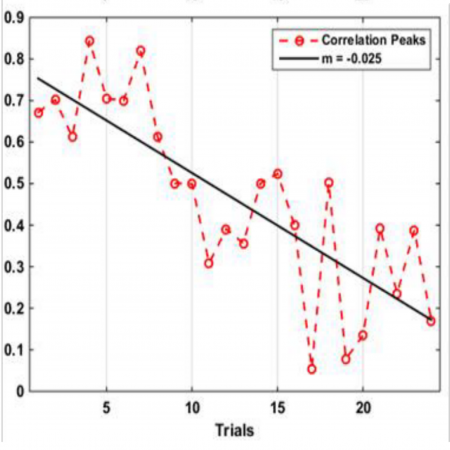
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Motor control strategies in the bimanual stabilization of an unstable virtual tool Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2015-Novem, pp. 3472-3475, 2015, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2015b,
title = {Motor control strategies in the bimanual stabilization of an unstable virtual tool},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7319140},
doi = {10.1109/EMBC.2015.7319140},
issn = {1557170X},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2015-Novem},
pages = {3472-3475},
abstract = {Previous works have shown that, when dealing with instabilities in a bimanual manipulation paradigm, humans modulate the stiffness of the arms according to feedforward or feedback mechanisms as a function of the dynamics of the task. The aim of this work is to complement these results getting insights on how the CNS controls the muscles to achieve the stabilization goal in the two aforementioned control strategies. Surface EMG was recorded from 13 muscles of each arm and trunk while three expert subjects performed bimanual balancing of a virtual underactuated tool immersed in an unstable force-field. Results suggest the existence of an intermittent muscle ensemble recruitment that follows two distinct activation patterns, namely synchronous co-contractions and independent activations. The observed EMG patterns were independent of the motor control strategy applied in the task. These findings therefore suggest the existence of separate control strategies for the tool stabilization and the control of hand movements at the muscular level during a bimanual postural task.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Previous works have shown that, when dealing with instabilities in a bimanual manipulation paradigm, humans modulate the stiffness of the arms according to feedforward or feedback mechanisms as a function of the dynamics of the task. The aim of this work is to complement these results getting insights on how the CNS controls the muscles to achieve the stabilization goal in the two aforementioned control strategies. Surface EMG was recorded from 13 muscles of each arm and trunk while three expert subjects performed bimanual balancing of a virtual underactuated tool immersed in an unstable force-field. Results suggest the existence of an intermittent muscle ensemble recruitment that follows two distinct activation patterns, namely synchronous co-contractions and independent activations. The observed EMG patterns were independent of the motor control strategy applied in the task. These findings therefore suggest the existence of separate control strategies for the tool stabilization and the control of hand movements at the muscular level during a bimanual postural task.
Avila-Mireles, Edwin Johnatan; Ruiz-Sánchez, Francisco J; García-Salazar, Octavio
EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation Proceedings Article
In: 2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2015, 2015.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@inproceedings{Avila-Mireles2015bb,
title = {EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation},
author = {Edwin Johnatan Avila-Mireles and Francisco J Ruiz-S\'{a}nchez and Octavio Garc\'{i}a-Salazar},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7357984},
doi = {10.1109/ICEEE.2015.7357984},
year = {2015},
date = {2015-01-01},
booktitle = {2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2015},
abstract = {Robotic devices have been used successfully in assisted rehabilitation to increase, in continuity and intensity, the effects of neuromuscular stimulation. However, information resulting from the Patient-Robot interaction is not yet analyzed for diagnosis purposes. The neuromuscular reaction to a controlled stimulation, measured in terms of physiologic and mechanic variables, can be used to establish a common causal relation in healthy people to be used as a reference to evaluate the state of a patient, and thus, reinforce or reconsider its treatment. In this paper, we analyze the upper limb EMG patterns induced kinesthetically by uniform and cyclic trajectories using a haptic interface, and we show the existence of common patterns in healthy volunteers and how these patterns together with the mechanical response, can be used as a reference in diagnosis by means of a Similitude Index; we describe the EMG signals considered in this work, the experimental conditions to induce their activation patterns, and we discuss about some experimental results obtained with healthy volunteers and stroke patients.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Robotic devices have been used successfully in assisted rehabilitation to increase, in continuity and intensity, the effects of neuromuscular stimulation. However, information resulting from the Patient-Robot interaction is not yet analyzed for diagnosis purposes. The neuromuscular reaction to a controlled stimulation, measured in terms of physiologic and mechanic variables, can be used to establish a common causal relation in healthy people to be used as a reference to evaluate the state of a patient, and thus, reinforce or reconsider its treatment. In this paper, we analyze the upper limb EMG patterns induced kinesthetically by uniform and cyclic trajectories using a haptic interface, and we show the existence of common patterns in healthy volunteers and how these patterns together with the mechanical response, can be used as a reference in diagnosis by means of a Similitude Index; we describe the EMG signals considered in this work, the experimental conditions to induce their activation patterns, and we discuss about some experimental results obtained with healthy volunteers and stroke patients.
2014
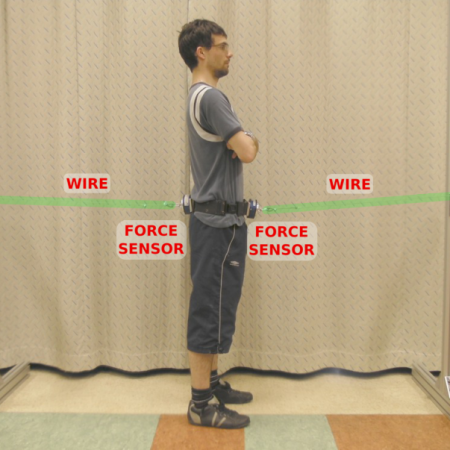
Peternel, Luka; Babič, Jan
Switchable task-priority framework for combining human-demonstrated and inverse kinematics tasks Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 542–547, IEEE, Bali, 2014, ISBN: 978-1-4799-7397-2.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Peternel2014a,
title = {Switchable task-priority framework for combining human-demonstrated and inverse kinematics tasks},
author = {Luka Peternel and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/7090387/},
doi = {10.1109/ROBIO.2014.7090387},
isbn = {978-1-4799-7397-2},
year = {2014},
date = {2014-12-01},
booktitle = {2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014)},
pages = {542--547},
publisher = {IEEE},
address = {Bali},
abstract = {We propose an approach that combines human demonstrated posture-control skill defined by the motion in the lower limb joints with an inverse kinematics solution of an arbitrary hand motion. The posture-control skill for humanoid robot was obtained through the human-in-the-loop teaching approach. The collected data during the teaching phase was used to approximate functional relation between the state of the robot's centre-of-pressure and the appropriate motion in the joints of the leg. The motion of the robot's hand was prescribed using the inverse kinematic solution. The posture-control skill and the motion of the hand were combined together using the task priority resolution strategy. We tested our approach with an experiment where the humanoid robot had to spin a spindle device with the hand and simultaneously maintain balance in the presence of external perturbations. In addition, we propose an upgrade that allows switching of control over the leg joints between arm task and posture-control task.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose an approach that combines human demonstrated posture-control skill defined by the motion in the lower limb joints with an inverse kinematics solution of an arbitrary hand motion. The posture-control skill for humanoid robot was obtained through the human-in-the-loop teaching approach. The collected data during the teaching phase was used to approximate functional relation between the state of the robot's centre-of-pressure and the appropriate motion in the joints of the leg. The motion of the robot's hand was prescribed using the inverse kinematic solution. The posture-control skill and the motion of the hand were combined together using the task priority resolution strategy. We tested our approach with an experiment where the humanoid robot had to spin a spindle device with the hand and simultaneously maintain balance in the presence of external perturbations. In addition, we propose an upgrade that allows switching of control over the leg joints between arm task and posture-control task.

Peternel, Luka; Petrič, Tadej; Oztop, Erhan; Babič, Jan
Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach Journal Article
In: Autonomous Robots, vol. 36, no. 1-2, pp. 123–136, 2014, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@article{Peternel2014b,
title = {Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach},
author = {Luka Peternel and Tadej Petri\v{c} and Erhan Oztop and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-013-9361-0},
doi = {10.1007/s10514-013-9361-0},
issn = {0929-5593},
year = {2014},
date = {2014-01-01},
journal = {Autonomous Robots},
volume = {36},
number = {1-2},
pages = {123--136},
abstract = {We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.
2013
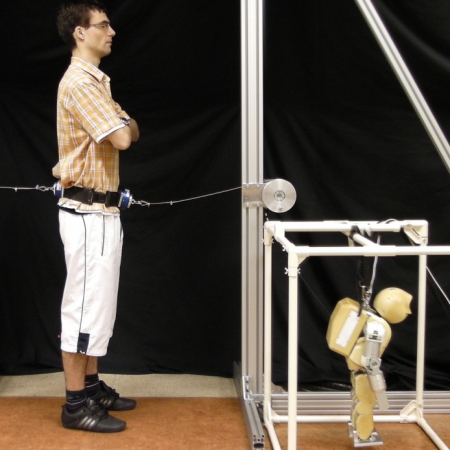
Peternel, Luka; Babič, Jan
Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability Proceedings Article
In: 2013 IEEE International Conference on Robotics and Automation, pp. 5329–5334, IEEE, Karlsruhe, 2013, ISBN: 978-1-4673-5643-5.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning | Links:
@inproceedings{Peternel2013a,
title = {Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6631340/},
doi = {10.1109/ICRA.2013.6631340},
isbn = {978-1-4673-5643-5},
year = {2013},
date = {2013-01-01},
booktitle = {2013 IEEE International Conference on Robotics and Automation},
pages = {5329--5334},
publisher = {IEEE},
address = {Karlsruhe},
abstract = {In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.},
keywords = {Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.
2011

Babič, Jan
Utilization of human sensorimotor learning capacity for obtaining novel robot behaviours: 2-DOF ball balancing on a parallel platform Proceedings Article
In: 2011 IEEE International Conference on Robotics and Biomimetics, pp. 1778–1782, IEEE, Karon Beach, 2011, ISBN: 978-1-4577-2138-0.
Abstract | BibTeX | Tags: Ergonomy, Machine Learning, Sensorimotor Learning | Links:
@inproceedings{Babic2011a,
title = {Utilization of human sensorimotor learning capacity for obtaining novel robot behaviours: 2-DOF ball balancing on a parallel platform},
author = {Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6181547/},
doi = {10.1109/ROBIO.2011.6181547},
isbn = {978-1-4577-2138-0},
year = {2011},
date = {2011-12-01},
booktitle = {2011 IEEE International Conference on Robotics and Biomimetics},
pages = {1778--1782},
publisher = {IEEE},
address = {Karon Beach},
abstract = {We propose a novel method for acquiring robot skill synthesis that exploits human capability to learn and to control complex tools and devices. The basic idea is to consider the target robotic system as a complex tool akin a computer mouse or a car that can be intuitively controlled by a human. Once the human learns how to control the robotic system effortlessly, the target behaviour can be obtained by the human on the robot through practice. The successful execution of the desired task by the human via the robot implies that the required control commands have been discovered by the human, and can subsequently be used for designing controller that operate autonomously. In this article, we demonstrate this idea by presenting a 2-DOF ball balancing task on a parallel platform obtained with the proposed method.},
keywords = {Ergonomy, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose a novel method for acquiring robot skill synthesis that exploits human capability to learn and to control complex tools and devices. The basic idea is to consider the target robotic system as a complex tool akin a computer mouse or a car that can be intuitively controlled by a human. Once the human learns how to control the robotic system effortlessly, the target behaviour can be obtained by the human on the robot through practice. The successful execution of the desired task by the human via the robot implies that the required control commands have been discovered by the human, and can subsequently be used for designing controller that operate autonomously. In this article, we demonstrate this idea by presenting a 2-DOF ball balancing task on a parallel platform obtained with the proposed method.
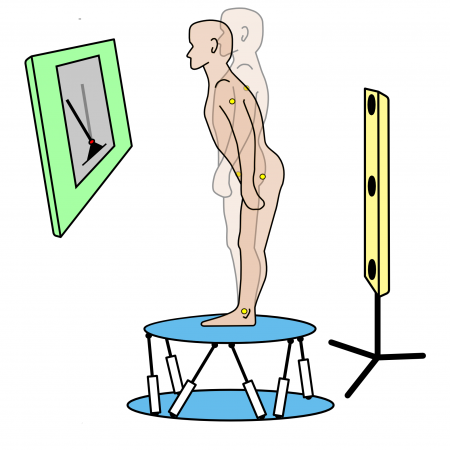
Babič, Jan; Hale, Joshua; Oztop, Erhan
Human sensorimotor learning for humanoid robot skill synthesis Journal Article
In: Adaptive Behavior, vol. 19, no. 4, pp. 250–263, 2011, ISSN: 1059-7123.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Babic2011b,
title = {Human sensorimotor learning for humanoid robot skill synthesis},
author = {Jan Babi\v{c} and Joshua Hale and Erhan Oztop},
url = {http://journals.sagepub.com/doi/10.1177/1059712311411112},
doi = {10.1177/1059712311411112},
issn = {1059-7123},
year = {2011},
date = {2011-01-01},
journal = {Adaptive Behavior},
volume = {19},
number = {4},
pages = {250--263},
abstract = {Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.
2010
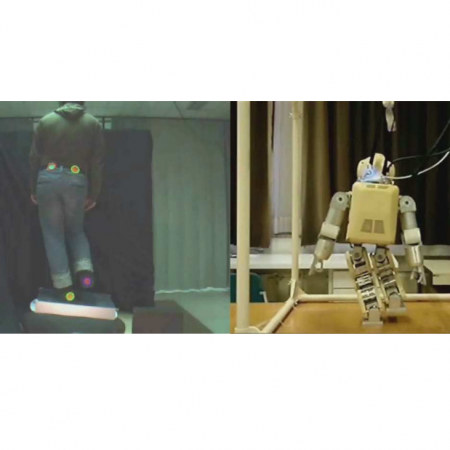
Babič, Jan; Hajdinjak, Blaž; Oztop, Erhan
Robot Skill Synthesis Through Human Visuo-Motor Learning - Humanoid Robot Statically-stable Reaching and In-place Stepping Proceedings Article
In: Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pp. 212–215, SciTePress - Science and and Technology Publications, Funchal, 2010, ISBN: 978-989-8425-00-3.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Babic2010,
title = {Robot Skill Synthesis Through Human Visuo-Motor Learning - Humanoid Robot Statically-stable Reaching and In-place Stepping},
author = {Jan Babi\v{c} and Bla\v{z} Hajdinjak and Erhan Oztop},
url = {http://www.scitepress.org/DigitalLibrary/Link.aspx?doi=10.5220/0002937502120215},
doi = {10.5220/0002937502120215},
isbn = {978-989-8425-00-3},
year = {2010},
date = {2010-01-01},
booktitle = {Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics},
volume = {2},
pages = {212--215},
publisher = {SciTePress - Science and and Technology Publications},
address = {Funchal},
abstract = {To achieve a desirable motion of the humanoid robots we propose a framework for robot skill-synthesis that is based on human visuo-motor learning capacity. The basic idea is to consider the humanoid robot as a tool that is intuitively controlled by a human demonstrator. Once the effortless control of the humanoid robot has been achieved, the desired behavior of the humanoid robot is obtained through practice. The successful execution of the desired motion by the human demonstrator is afterwards used for the design of motion controllers that operate autonomously. In the paper we describe our idea by presenting a couple of robot skills obtained by the proposed framework.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
To achieve a desirable motion of the humanoid robots we propose a framework for robot skill-synthesis that is based on human visuo-motor learning capacity. The basic idea is to consider the humanoid robot as a tool that is intuitively controlled by a human demonstrator. Once the effortless control of the humanoid robot has been achieved, the desired behavior of the humanoid robot is obtained through practice. The successful execution of the desired motion by the human demonstrator is afterwards used for the design of motion controllers that operate autonomously. In the paper we describe our idea by presenting a couple of robot skills obtained by the proposed framework.
2009
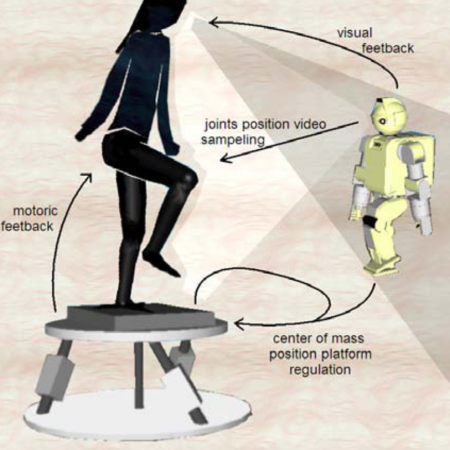
Hajdinjak, Blaž; Babič, Jan; Oztop, Erhan
Improving balance regulation in visuo-motor control for humanoid robots Proceedings Article
In: 2009 24th International Symposium on Computer and Information Sciences, pp. 405–408, IEEE, Guzelyut, 2009, ISBN: 978-1-4244-5021-3.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Hajdinjak2009,
title = {Improving balance regulation in visuo-motor control for humanoid robots},
author = {Bla\v{z} Hajdinjak and Jan Babi\v{c} and Erhan Oztop},
url = {http://ieeexplore.ieee.org/document/5291801/},
doi = {10.1109/ISCIS.2009.5291801},
isbn = {978-1-4244-5021-3},
year = {2009},
date = {2009-01-01},
booktitle = {2009 24th International Symposium on Computer and Information Sciences},
pages = {405--408},
publisher = {IEEE},
address = {Guzelyut},
abstract = {We know various strategies toward teaching and controlling humanoid robots. Some refer to direct joint or tip control and others use more intuitive approach such as mimicking human motion in a certain task. This kind of robot control, where a robot is considered a tool, controlled by a human demonstrator, is called visuo-motion control. In this paper, we present an improved approach to overcome a problem of balance in visuo-motor control of humanoid robots.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We know various strategies toward teaching and controlling humanoid robots. Some refer to direct joint or tip control and others use more intuitive approach such as mimicking human motion in a certain task. This kind of robot control, where a robot is considered a tool, controlled by a human demonstrator, is called visuo-motion control. In this paper, we present an improved approach to overcome a problem of balance in visuo-motor control of humanoid robots.
2008
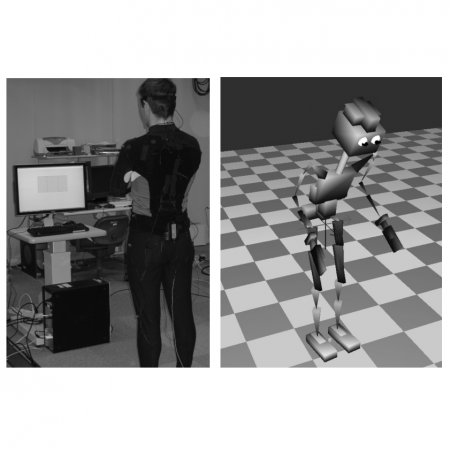
Oztop, Erhan; Babič, Jan; Hale, Joshua; Cheng, Gordon; Kawato, Mitsuo
From Biologically Realistic Imitation to Robot Teaching Via Human Motor Learning Book Section
In: Ishikawa, Masumi; Doya, Kenji; Miyamoto, Hiroyuki; Yamakawa, Takeshi (Ed.): Neural Information Processing, vol. 4985, pp. 214–221, Springer, Berlin, 2008, ISSN: 0302-9743.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@incollection{Oztop2008,
title = {From Biologically Realistic Imitation to Robot Teaching Via Human Motor Learning},
author = {Erhan Oztop and Jan Babi\v{c} and Joshua Hale and Gordon Cheng and Mitsuo Kawato},
editor = {Masumi Ishikawa and Kenji Doya and Hiroyuki Miyamoto and Takeshi Yamakawa},
url = {http://link.springer.com/10.1007/978-3-540-69162-4_23},
doi = {10.1007/978-3-540-69162-4_23},
issn = {0302-9743},
year = {2008},
date = {2008-01-01},
booktitle = {Neural Information Processing},
volume = {4985},
pages = {214--221},
publisher = {Springer},
address = {Berlin},
series = {Lecture Notes in Computer Science},
abstract = {Understanding mechanisms of imitation is a complex task in both human sciences and robotics. On the one hand, one can build systems that analyze observed motion, map it to their own body, and produce the motor commands to needed to achieve the inferred motion using engineering techniques. On the other hand, one can model the neural circuits involved in action observation and production in minute detail and hope that imitation will be an emergent property of the system. However if the goal is to build robots capable of skillful actions, midway solutions appear to be more appropriate. In this direction, we first introduce a conceptually biologically realistic neural network that can learn to imitate hand postures, either with the help of a teacher or by self-observation. Then we move to a paradigm we have recently proposed, where robot skill synthesis is achieved by exploiting the human capacity to learn novel control tasks.},
keywords = {Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
Understanding mechanisms of imitation is a complex task in both human sciences and robotics. On the one hand, one can build systems that analyze observed motion, map it to their own body, and produce the motor commands to needed to achieve the inferred motion using engineering techniques. On the other hand, one can model the neural circuits involved in action observation and production in minute detail and hope that imitation will be an emergent property of the system. However if the goal is to build robots capable of skillful actions, midway solutions appear to be more appropriate. In this direction, we first introduce a conceptually biologically realistic neural network that can learn to imitate hand postures, either with the help of a teacher or by self-observation. Then we move to a paradigm we have recently proposed, where robot skill synthesis is achieved by exploiting the human capacity to learn novel control tasks.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si