




2024

Tatarelli, Antonella; Babič, Jan; Casali, Carlo; Castiglia, Stefano Filippo; Chini, Giorgia; Ciancia, Rosanna; Cioffi, Ettore; Fiori, Lorenzo; Michieli, Mariagrazia; Montante, Barbara; Serrao, Mariano; Varrecchia, Tiwana; Ranavolo, Alberto
The Effect of a Wearable Assistive Trunk Exoskeleton on the Motor Coordination of People with Cerebellar Ataxia Journal Article
In: Applied Sciences, vol. 14, iss. 15, pp. 6537, 2024, ISSN: 2076-3417.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Postural Balance | Links:
@article{Tatarelli2024,
title = {The Effect of a Wearable Assistive Trunk Exoskeleton on the Motor Coordination of People with Cerebellar Ataxia},
author = {Antonella Tatarelli and Jan Babi\v{c} and Carlo Casali and Stefano Filippo Castiglia and Giorgia Chini and Rosanna Ciancia and Ettore Cioffi and Lorenzo Fiori and Mariagrazia Michieli and Barbara Montante and Mariano Serrao and Tiwana Varrecchia and Alberto Ranavolo},
doi = {10.3390/app14156537},
issn = {2076-3417},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Applied Sciences},
volume = {14},
issue = {15},
pages = {6537},
abstract = {The motor features of people with cerebellar ataxia suggest that locomotion is substantially impaired due to incoordination of the head, trunk, and limbs. The purpose of this study was to investigate how well a wearable soft passive exoskeleton worked for motor coordination in these patients. We used an optoelectronic system to examine the gait of nine ataxic people in three different conditions: without an exoskeleton and with two variants of the exoskeleton, one less and the other more flexible. We investigated kinematics using trunk ranges of motion, the displacement of the center of mass in the medio-lateral direction, and the parameters of mechanical energy consumption and recovery. Furthermore, we investigated the lower limb and trunk muscle coactivation. The results revealed a reduction of the medio-lateral sway of the center of mass, a more efficient behavior of the body in the antero-posterior direction, an energy expenditure optimization, a reduction of muscle coactivation and a better coordination between muscle activations. As a result, the findings laid the groundwork for the device to be used in the rehabilitation of individuals with cerebellar ataxia.},
keywords = {Ergonomy, Exoskeleton Design and Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The motor features of people with cerebellar ataxia suggest that locomotion is substantially impaired due to incoordination of the head, trunk, and limbs. The purpose of this study was to investigate how well a wearable soft passive exoskeleton worked for motor coordination in these patients. We used an optoelectronic system to examine the gait of nine ataxic people in three different conditions: without an exoskeleton and with two variants of the exoskeleton, one less and the other more flexible. We investigated kinematics using trunk ranges of motion, the displacement of the center of mass in the medio-lateral direction, and the parameters of mechanical energy consumption and recovery. Furthermore, we investigated the lower limb and trunk muscle coactivation. The results revealed a reduction of the medio-lateral sway of the center of mass, a more efficient behavior of the body in the antero-posterior direction, an energy expenditure optimization, a reduction of muscle coactivation and a better coordination between muscle activations. As a result, the findings laid the groundwork for the device to be used in the rehabilitation of individuals with cerebellar ataxia.
2022
Eiken, Ola; Mekjavić, Igor B.; Babič, Jan; Danielsson, Ulf; Hallberg, Magnus; Kounalakis, Stylianos N.
Effects of vision on energy expenditure and kinematics during level walking Journal Article
In: European Journal of Applied Physiology, vol. 122, no. 5, pp. 1231–1237, 2022, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Kinematics, Postural Balance | Links:
@article{Eiken2022,
title = {Effects of vision on energy expenditure and kinematics during level walking},
author = {Ola Eiken and Igor B. Mekjavi\'{c} and Jan Babi\v{c} and Ulf Danielsson and Magnus Hallberg and Stylianos N. Kounalakis},
url = {https://link.springer.com/10.1007/s00421-022-04914-6},
doi = {10.1007/s00421-022-04914-6},
issn = {1439-6319},
year = {2022},
date = {2022-05-01},
urldate = {2022-05-01},
journal = {European Journal of Applied Physiology},
volume = {122},
number = {5},
pages = {1231--1237},
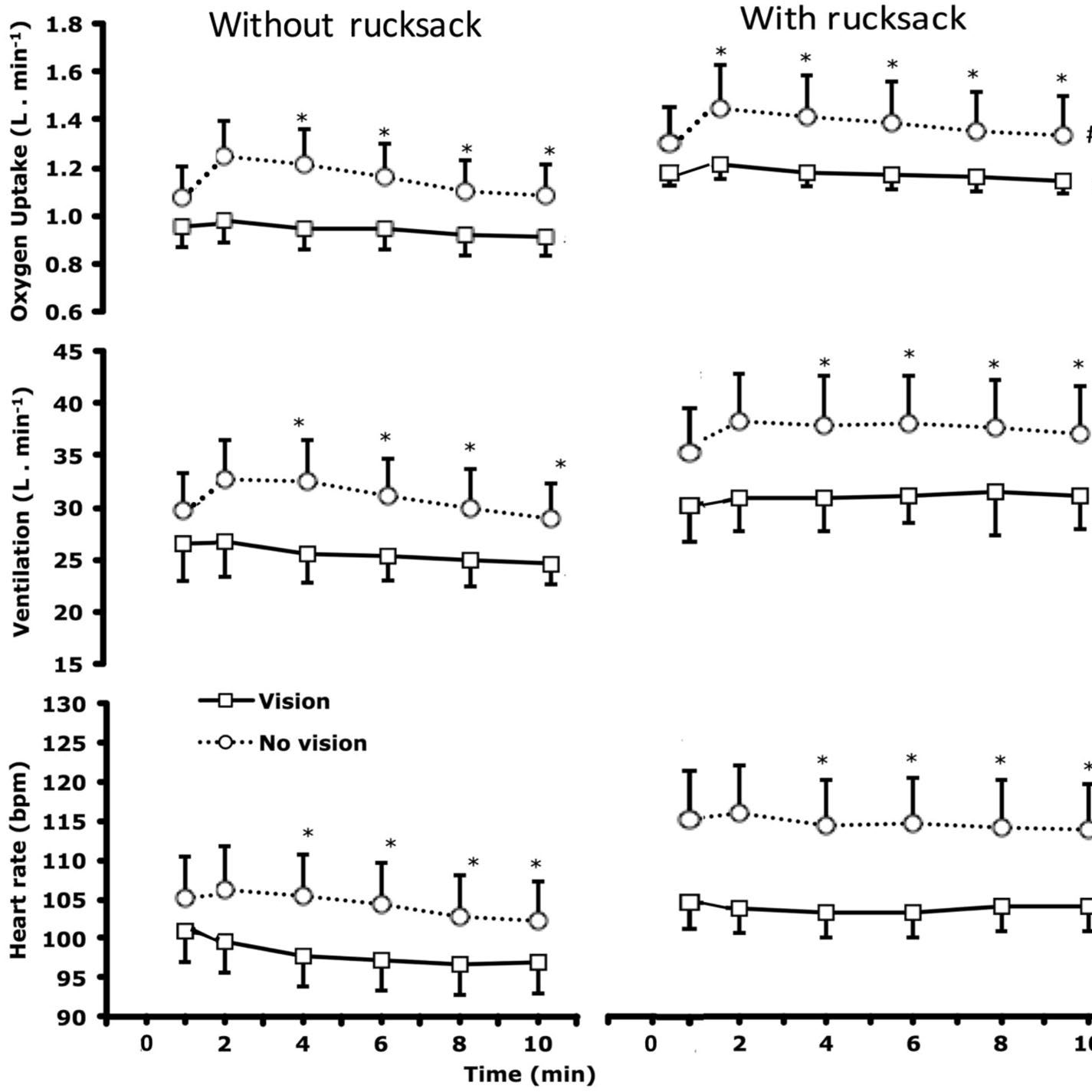
abstract = {Purpose We have previously observed substantially higher oxygen uptake in soldiers walking on terrain at night than when performing the same walk in bright daylight. The aims of the present study were to investigate the influence of vision on mechanical efficiency during slow, horizontal, constant-speed walking, and to determine whether any vision influence is modified by load carriage. Methods Each subject (n = 15) walked (3.3 km/h) for 10 min on a treadmill in four different conditions: (1) full vision, no carried load, (2) no vision, no carried load, (3) full vision with a 25.5-kg rucksack, (4) no vision with a 25.5-kg rucksack. Results Oxygen uptake was 0.94 ± 0.12 l/min in condition (1), 1.15 ± 0.20 l/min in (2), 1.15 ± 0.12 l/min in (3) and 1.35 ± 0.19 l/min in (4). Thus, lack of vision increased oxygen uptake by about 19%. Analyses of movement pattern, by use of optical markers attached to the limbs and torso, revealed considerably shorter step length (12 and 10%) in the no vision (2 and 4) than full vision conditions (1 and 3). No vision conditions (2 and 4) increased step width by 6 and 6%, and increased vertical foot clearance by 20 and 16% compared to full vision conditions (1 and 3). Conclusion The results suggest that vision has a marked influence on mechanical efficiency even during entrained, repetitive movements performed on an obstacle-free horizontal surface under highly predictable conditions.},
keywords = {Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Purpose We have previously observed substantially higher oxygen uptake in soldiers walking on terrain at night than when performing the same walk in bright daylight. The aims of the present study were to investigate the influence of vision on mechanical efficiency during slow, horizontal, constant-speed walking, and to determine whether any vision influence is modified by load carriage. Methods Each subject (n = 15) walked (3.3 km/h) for 10 min on a treadmill in four different conditions: (1) full vision, no carried load, (2) no vision, no carried load, (3) full vision with a 25.5-kg rucksack, (4) no vision with a 25.5-kg rucksack. Results Oxygen uptake was 0.94 ± 0.12 l/min in condition (1), 1.15 ± 0.20 l/min in (2), 1.15 ± 0.12 l/min in (3) and 1.35 ± 0.19 l/min in (4). Thus, lack of vision increased oxygen uptake by about 19%. Analyses of movement pattern, by use of optical markers attached to the limbs and torso, revealed considerably shorter step length (12 and 10%) in the no vision (2 and 4) than full vision conditions (1 and 3). No vision conditions (2 and 4) increased step width by 6 and 6%, and increased vertical foot clearance by 20 and 16% compared to full vision conditions (1 and 3). Conclusion The results suggest that vision has a marked influence on mechanical efficiency even during entrained, repetitive movements performed on an obstacle-free horizontal surface under highly predictable conditions.
Gorjan, Daša; Šarabon, Nejc; Babič, Jan
Inter-Individual Variability in Postural Control During External Center of Mass Stabilization Journal Article
In: Frontiers in Physiology, vol. 12, no. January, 2022, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance | Links:
@article{Gorjan2022,
title = {Inter-Individual Variability in Postural Control During External Center of Mass Stabilization},
author = {Da\v{s}a Gorjan and Nejc \v{S}arabon and Jan Babi\v{c}},
url = {https://www.frontiersin.org/articles/10.3389/fphys.2021.722732/full},
doi = {10.3389/fphys.2021.722732},
issn = {1664-042X},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
journal = {Frontiers in Physiology},
volume = {12},
number = {January},
abstract = {Understanding the relation between the motion of the center of mass (COM) and the center of pressure (COP) is important to understand the underlying mechanisms of maintaining body equilibrium. One way to investigate this is to stabilize COM by fixing the joints of the human and looking at the corresponding COP reactions. However, this approach constrains the natural motion of the human. To avoid this shortcoming, we stabilized COM without constraining the joint movements by using an external stabilization method based on inverted cart-pendulum system. Interestingly, this method only stabilized COM of a subgroup of participants and had a destabilizing effect for others which implies significant variability in inter-individual postural control. The aim of this work was to investigate the underlying causes of inter-individual variability by studying the postural parameters of quiet standing before the external stabilization. Eighteen volunteers took part in the experiment where they were standing on an actuated cart for 335 s. In the middle of this period we stabilized their COM in anteroposterior direction for 105 s. To stabilize the COM, we controlled the position of the cart using a double proportional\textendashintegral\textendashderivative controller. We recorded COM position throughout the experiment, calculated its velocity, amplitude, and frequency during the quiet standing before the stabilization, and used these parameters as features in hierarchical clustering method. Clustering solution revealed that postural parameters of quiet standing before the stabilization cannot explain the inter-individual variability of postural responses during the external COM stabilization. COM was successfully stabilized for a group of participants but had a destabilizing effect on the others, showing a variability in individual postural control which cannot be explained by postural parameters of quiet-stance.},
keywords = {Human Motor Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Understanding the relation between the motion of the center of mass (COM) and the center of pressure (COP) is important to understand the underlying mechanisms of maintaining body equilibrium. One way to investigate this is to stabilize COM by fixing the joints of the human and looking at the corresponding COP reactions. However, this approach constrains the natural motion of the human. To avoid this shortcoming, we stabilized COM without constraining the joint movements by using an external stabilization method based on inverted cart-pendulum system. Interestingly, this method only stabilized COM of a subgroup of participants and had a destabilizing effect for others which implies significant variability in inter-individual postural control. The aim of this work was to investigate the underlying causes of inter-individual variability by studying the postural parameters of quiet standing before the external stabilization. Eighteen volunteers took part in the experiment where they were standing on an actuated cart for 335 s. In the middle of this period we stabilized their COM in anteroposterior direction for 105 s. To stabilize the COM, we controlled the position of the cart using a double proportional–integral–derivative controller. We recorded COM position throughout the experiment, calculated its velocity, amplitude, and frequency during the quiet standing before the stabilization, and used these parameters as features in hierarchical clustering method. Clustering solution revealed that postural parameters of quiet standing before the stabilization cannot explain the inter-individual variability of postural responses during the external COM stabilization. COM was successfully stabilized for a group of participants but had a destabilizing effect on the others, showing a variability in individual postural control which cannot be explained by postural parameters of quiet-stance.
2021
Sever, Jernej; Babič, Jan; Kozinc, Žiga; Šarabon, Nejc
Postural responses to sudden horizontal perturbations in tai chi practitioners Journal Article
In: International Journal of Environmental Research and Public Health, vol. 18, no. 5, pp. 1–12, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport | Links:
@article{Sever2021,
title = {Postural responses to sudden horizontal perturbations in tai chi practitioners},
author = {Jernej Sever and Jan Babi\v{c} and \v{Z}iga Kozinc and Nejc \v{S}arabon},
doi = {10.3390/ijerph18052692},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {5},
pages = {1--12},
abstract = {Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p \< 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005\textendash0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport},
pubstate = {published},
tppubtype = {article}
}
Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p < 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005–0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.

Gorjan, Daša; Bellicha, Angelina; Čamernik, Jernej; Bachta, Wael; Babič, Jan
Induced stabilization of center of mass decreases variability of center of pressure regardless of visual or tactile information Journal Article
In: Journal of Biomechanics, vol. 117, 2021, ISSN: 18732380.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Gorjan2021,
title = {Induced stabilization of center of mass decreases variability of center of pressure regardless of visual or tactile information},
author = {Da\v{s}a Gorjan and Angelina Bellicha and Jernej \v{C}amernik and Wael Bachta and Jan Babi\v{c}},
doi = {10.1016/j.jbiomech.2020.110199},
issn = {18732380},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Journal of Biomechanics},
volume = {117},
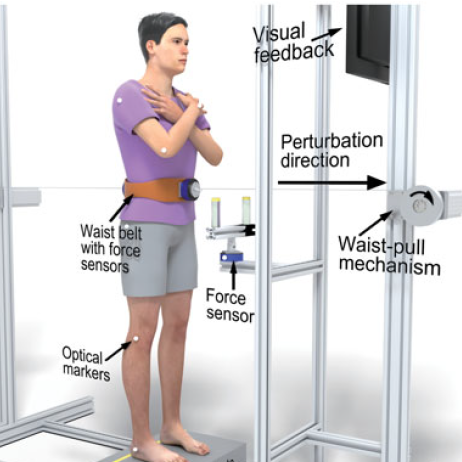
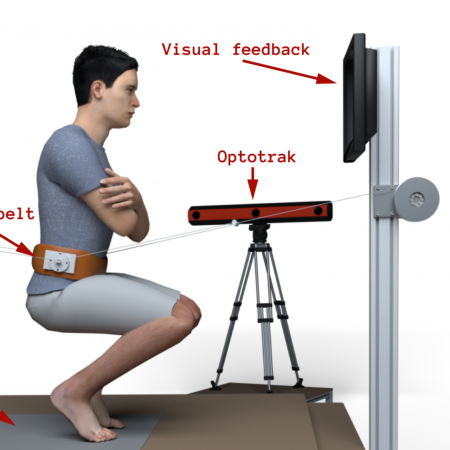
abstract = {Traditional theories claim that center of pressure (COP) is oscillating to minimize the center of mass (COM) movements, contrary to exploratory theories which propose that COP oscillates to increase sensory information flow from the environment. The aim of this work was to better understand the underlying postural control mechanisms, specifically the interplay of COP oscillations and sensory information flow on keeping the COM stable. Eighteen volunteers took part of the experiment divided into three parts based on sensory conditions: eyes opened, eyes closed and eyes closed with lightly touching a fixed object with one finger. Throughout each part the participants had to quietly stand for 335 s. In the middle of each part, we stabilized their COM for 105 s using a robotized waist-pull system. We recorded whole-body kinematics, COP oscillations, electromyographic activity of soleus and tibialis anterior muscles and the force applied by the finger during light touch conditions. The variability of COP significantly decreased when the COM was stabilized in all sensory conditions. The interaction between sensory condition and stabilization was also significant with different decline of COP variability between quiet standing and stabilization part in all three different sensory conditions. Ankle and knee angle variability decreased significantly while the hip angle variability did not. Our findings suggest that COP is not moving to explore the environment, but to attenuate oscillations of the COM. However, possible functional aspect of movement variability to keep the COM stable still remains.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Traditional theories claim that center of pressure (COP) is oscillating to minimize the center of mass (COM) movements, contrary to exploratory theories which propose that COP oscillates to increase sensory information flow from the environment. The aim of this work was to better understand the underlying postural control mechanisms, specifically the interplay of COP oscillations and sensory information flow on keeping the COM stable. Eighteen volunteers took part of the experiment divided into three parts based on sensory conditions: eyes opened, eyes closed and eyes closed with lightly touching a fixed object with one finger. Throughout each part the participants had to quietly stand for 335 s. In the middle of each part, we stabilized their COM for 105 s using a robotized waist-pull system. We recorded whole-body kinematics, COP oscillations, electromyographic activity of soleus and tibialis anterior muscles and the force applied by the finger during light touch conditions. The variability of COP significantly decreased when the COM was stabilized in all sensory conditions. The interaction between sensory condition and stabilization was also significant with different decline of COP variability between quiet standing and stabilization part in all three different sensory conditions. Ankle and knee angle variability decreased significantly while the hip angle variability did not. Our findings suggest that COP is not moving to explore the environment, but to attenuate oscillations of the COM. However, possible functional aspect of movement variability to keep the COM stable still remains.
2020
Ugurlu, Barkan; Oshima, Hironori; Sariyildiz, Emre; Narikiyo, Tatsuo; Babič, Jan
Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 50, no. 2, pp. 144–153, 2020, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance | Links:
@article{Ugurlu2020,
title = {Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking},
author = {Barkan Ugurlu and Hironori Oshima and Emre Sariyildiz and Tatsuo Narikiyo and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8960446/},
doi = {10.1109/THMS.2019.2961969},
issn = {2168-2291},
year = {2020},
date = {2020-04-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {50},
number = {2},
pages = {144--153},
abstract = {This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.
Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Daniele; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 1, pp. 152–164, 2020, ISSN: 1534-4320.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance | Links:
@article{Maurice2020b,
title = {Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Daniele Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8856265/},
doi = {10.1109/TNSRE.2019.2945368},
issn = {1534-4320},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
volume = {28},
number = {1},
pages = {152--164},
address = {Nancy},
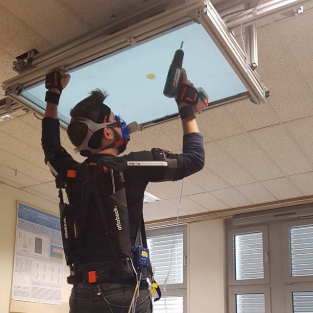
abstract = {Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.
Rottmann, Nils; Kunavar, Tjaša; Babič, Jan; Peters, Jan; Rueckert, Elmar
Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article
In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5490–5496, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Postural Balance | Links:
@inproceedings{9341335,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {Nils Rottmann and Tja\v{s}a Kunavar and Jan Babi\v{c} and Jan Peters and Elmar Rueckert},
doi = {10.1109/IROS45743.2020.9341335},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {5490--5496},
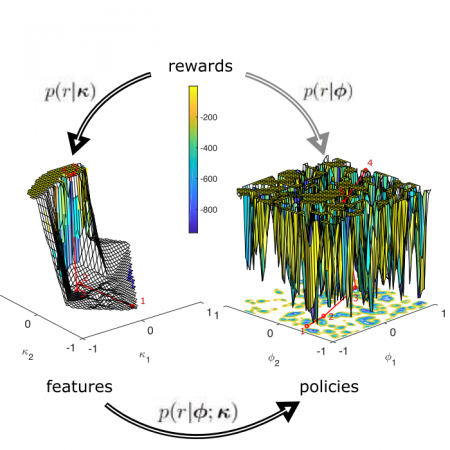
abstract = {Learning control policies in robotic tasks requires a large number of interactions due to small learning rates, bounds on the updates or unknown constraints. In contrast humans can infer protective and safe solutions after a single failure or unexpected observation. In order to reach similar performance, we developed a hierarchical Bayesian optimization algorithm that replicates the cognitive inference and memorization process for avoiding failures in motor control tasks. A Gaussian Process implements the modeling and the sampling of the acquisition function. This enables rapid learning with large learning rates while a mental replay phase ensures that policy regions that led to failures are inhibited during the sampling process. The features of the hierarchical Bayesian optimization method are evaluated in a simulated and physiological humanoid postural balancing task. The method out- performs standard optimization techniques, such as Bayesian Optimization, in the number of interactions to solve the task, in the computational demands and in the frequency of observed failures. Further, we show that our method performs similar to humans for learning the postural balancing task by comparing our simulation results with real human data.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Learning control policies in robotic tasks requires a large number of interactions due to small learning rates, bounds on the updates or unknown constraints. In contrast humans can infer protective and safe solutions after a single failure or unexpected observation. In order to reach similar performance, we developed a hierarchical Bayesian optimization algorithm that replicates the cognitive inference and memorization process for avoiding failures in motor control tasks. A Gaussian Process implements the modeling and the sampling of the acquisition function. This enables rapid learning with large learning rates while a mental replay phase ensures that policy regions that led to failures are inhibited during the sampling process. The features of the hierarchical Bayesian optimization method are evaluated in a simulated and physiological humanoid postural balancing task. The method out- performs standard optimization techniques, such as Bayesian Optimization, in the number of interactions to solve the task, in the computational demands and in the frequency of observed failures. Further, we show that our method performs similar to humans for learning the postural balancing task by comparing our simulation results with real human data.
2019

Jamšek, Marko; Babič, Jan
Human Trunk Stabilization with Hip Exoskeleton for Enhanced Postural Control Book Section
In: Wearable Robotics: Challenges and Trends, pp. 450–454, Springer, Cham, 2019.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Postural Balance | Links:
@incollection{Jamsek2019,
title = {Human Trunk Stabilization with Hip Exoskeleton for Enhanced Postural Control},
author = {Marko Jam\v{s}ek and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/978-3-030-01887-0_87},
doi = {10.1007/978-3-030-01887-0_87},
year = {2019},
date = {2019-10-01},
booktitle = {Wearable Robotics: Challenges and Trends},
pages = {450--454},
publisher = {Springer, Cham},
abstract = {Tripping is a major cause of falls in elderly people. Considering that fall related injuries have severe consequences on their quality of life, there is an urgent need to develop preventive solutions. One such solution could be the use of assistive exoskeletons. In this work we investigated the effects of a hip exoskeleton on human posture under the influence of an external perturbation. During normal standing of a subject we applied a forward pulling force at the chest and then enabled or disabled the exoskeleton randomly. By analysing the kinematics of the human body we compared responses to perturbations when the exoskeleton was enabled or disabled. The results show that the exoskeleton efficiently reduced the forward inclination of the trunk by 40%.},
keywords = {Exoskeleton Design and Control, Postural Balance},
pubstate = {published},
tppubtype = {incollection}
}
Tripping is a major cause of falls in elderly people. Considering that fall related injuries have severe consequences on their quality of life, there is an urgent need to develop preventive solutions. One such solution could be the use of assistive exoskeletons. In this work we investigated the effects of a hip exoskeleton on human posture under the influence of an external perturbation. During normal standing of a subject we applied a forward pulling force at the chest and then enabled or disabled the exoskeleton randomly. By analysing the kinematics of the human body we compared responses to perturbations when the exoskeleton was enabled or disabled. The results show that the exoskeleton efficiently reduced the forward inclination of the trunk by 40%.
Azad, Morteza; Babič, Jan; Mistry, Michael
Effects of the weighting matrix on dynamic manipulability of robots Journal Article
In: Autonomous Robots, vol. 43, no. 7, pp. 1867–1879, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Postural Balance | Links:
@article{Azad2019,
title = {Effects of the weighting matrix on dynamic manipulability of robots},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {http://link.springer.com/10.1007/s10514-018-09819-y},
doi = {10.1007/s10514-018-09819-y},
year = {2019},
date = {2019-02-01},
journal = {Autonomous Robots},
volume = {43},
number = {7},
pages = {1867--1879},
abstract = {Dynamic manipulability of robots is a well-known tool to analyze, measure and predict a robot's performance in executing different tasks. This tool provides a graphical representation and a set of metrics as outcomes of a mapping from joint torques to the acceleration space of any point of interest of a robot such as the end-effector or the center of mass. In this paper, we show that the weighting matrix, which is included in the aforementioned mapping, plays a crucial role in the results of the dynamic manipulability analysis. Therefore, finding proper values for this matrix is the key to achieve reliable results. This paper studies the importance of the weighting matrix for dynamic manipulability of robots, which is overlooked in the literature, and suggests two physically meaningful choices for that matrix. We also explain three different metrics, which can be extracted from the graphical representations (i.e. ellipsoids) of the dynamic manipulability analysis. The application of these metrics in measuring a robot's physical ability to accelerate its end-effector in various desired directions is discussed via two illustrative examples.},
keywords = {Human Motor Control, Optimal Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Dynamic manipulability of robots is a well-known tool to analyze, measure and predict a robot's performance in executing different tasks. This tool provides a graphical representation and a set of metrics as outcomes of a mapping from joint torques to the acceleration space of any point of interest of a robot such as the end-effector or the center of mass. In this paper, we show that the weighting matrix, which is included in the aforementioned mapping, plays a crucial role in the results of the dynamic manipulability analysis. Therefore, finding proper values for this matrix is the key to achieve reliable results. This paper studies the importance of the weighting matrix for dynamic manipulability of robots, which is overlooked in the literature, and suggests two physically meaningful choices for that matrix. We also explain three different metrics, which can be extracted from the graphical representations (i.e. ellipsoids) of the dynamic manipulability analysis. The application of these metrics in measuring a robot's physical ability to accelerate its end-effector in various desired directions is discussed via two illustrative examples.

White, Olivier; Babič, Jan; Trenado, Carlos; Johannsen, Leif; Goswami, Nandu
The Promise of Stochastic Resonance in Falls Prevention Journal Article
In: Frontiers in Physiology, vol. 9, no. January, pp. 1–12, 2019, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning | Links:
@article{White2019,
title = {The Promise of Stochastic Resonance in Falls Prevention},
author = {Olivier White and Jan Babi\v{c} and Carlos Trenado and Leif Johannsen and Nandu Goswami},
url = {https://www.frontiersin.org/article/10.3389/fphys.2018.01865/full},
doi = {10.3389/fphys.2018.01865},
issn = {1664-042X},
year = {2019},
date = {2019-01-01},
journal = {Frontiers in Physiology},
volume = {9},
number = {January},
pages = {1--12},
abstract = {Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.

Gorjan, Daša; Babič, Jan; Šarabon, Nejc; Potocanac, Zrinka
Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults Journal Article
In: Journal of Biomechanics, vol. 91, pp. 1–6, 2019, ISSN: 18732380.
Abstract | BibTeX | Tags: Kinematics, Muscle Mechanics, Postural Balance | Links:
@article{Gorjan2019,
title = {Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults},
author = {Da\v{s}a Gorjan and Jan Babi\v{c} and Nejc \v{S}arabon and Zrinka Potocanac},
url = {http://www.sciencedirect.com/science/article/pii/S0021929018307292},
doi = {10.1016/j.jbiomech.2018.09.008},
issn = {18732380},
year = {2019},
date = {2019-01-01},
journal = {Journal of Biomechanics},
volume = {91},
pages = {1--6},
abstract = {Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p \< .001, RMS p ≤ .001, MPF p \< .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p \< .001), SD (p \< .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.},
keywords = {Kinematics, Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p < .001, RMS p ≤ .001, MPF p < .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p < .001), SD (p < .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.
Čamernik, Jernej; Kezić, Sanja; Babič, Jan
Threat-related changes in postural control in virtual environments Proceedings Article
In: 2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book, pp. 393, Edinburgh, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Postural Balance
@inproceedings{\v{C}amernik2019a,
title = {Threat-related changes in postural control in virtual environments},
author = {Jernej \v{C}amernik and Sanja Kezi\'{c} and Jan Babi\v{c}},
year = {2019},
date = {2019-01-01},
booktitle = {2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book},
pages = {393},
address = {Edinburgh},
abstract = {Immersive virtual reality (VR) can be used as a tool to treat various medical conditions including psychiatric and motor control disorders. Since it enables a highly modifiable environment and difficulty, it has a large potential to be used as a research platform to study balance control. Otherwise hard to achieve extreme and dangerous experiences like standing on a very high ledge, can be easily achieved with the immersive VR within the research lab. Furthermore, it has been shown that the level of immersion in VR is highly determined by the capability of the system to deliver an inclusive, extensive, surrounding, vivid and matching illusion of reality to the senses of a participant. Therefore, we prepared an immersive VR environment, coupled with a robotic device to further enhance the level of immersion. With this setup we aimed to evaluate the threat related changes in postural control when using immersive VR with additional bodily gravity cues.},
keywords = {Human Motor Control, Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Immersive virtual reality (VR) can be used as a tool to treat various medical conditions including psychiatric and motor control disorders. Since it enables a highly modifiable environment and difficulty, it has a large potential to be used as a research platform to study balance control. Otherwise hard to achieve extreme and dangerous experiences like standing on a very high ledge, can be easily achieved with the immersive VR within the research lab. Furthermore, it has been shown that the level of immersion in VR is highly determined by the capability of the system to deliver an inclusive, extensive, surrounding, vivid and matching illusion of reality to the senses of a participant. Therefore, we prepared an immersive VR environment, coupled with a robotic device to further enhance the level of immersion. With this setup we aimed to evaluate the threat related changes in postural control when using immersive VR with additional bodily gravity cues.
Čamernik, Jernej; Azad, Morteza; Peternel, Luka; Potočanac, Zrinka; Babič, Jan
Staying on your feet: the effectiveness of posture and handles in counteracting balance perturbation Journal Article
In: Ergonomics, vol. 62, no. 5, pp. 657–667, 2019, ISSN: 0014-0139.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Postural Balance | Links:
@article{\v{C}amernik2019b,
title = {Staying on your feet: the effectiveness of posture and handles in counteracting balance perturbation},
author = {Jernej \v{C}amernik and Morteza Azad and Luka Peternel and Zrinka Poto\v{c}anac and Jan Babi\v{c}},
url = {https://doi.org/10.1080/00140139.2018.1559363 https://www.tandfonline.com/doi/full/10.1080/00140139.2018.1559363},
doi = {10.1080/00140139.2018.1559363},
issn = {0014-0139},
year = {2019},
date = {2019-01-01},
journal = {Ergonomics},
volume = {62},
number = {5},
pages = {657--667},
publisher = {Taylor \& Francis},
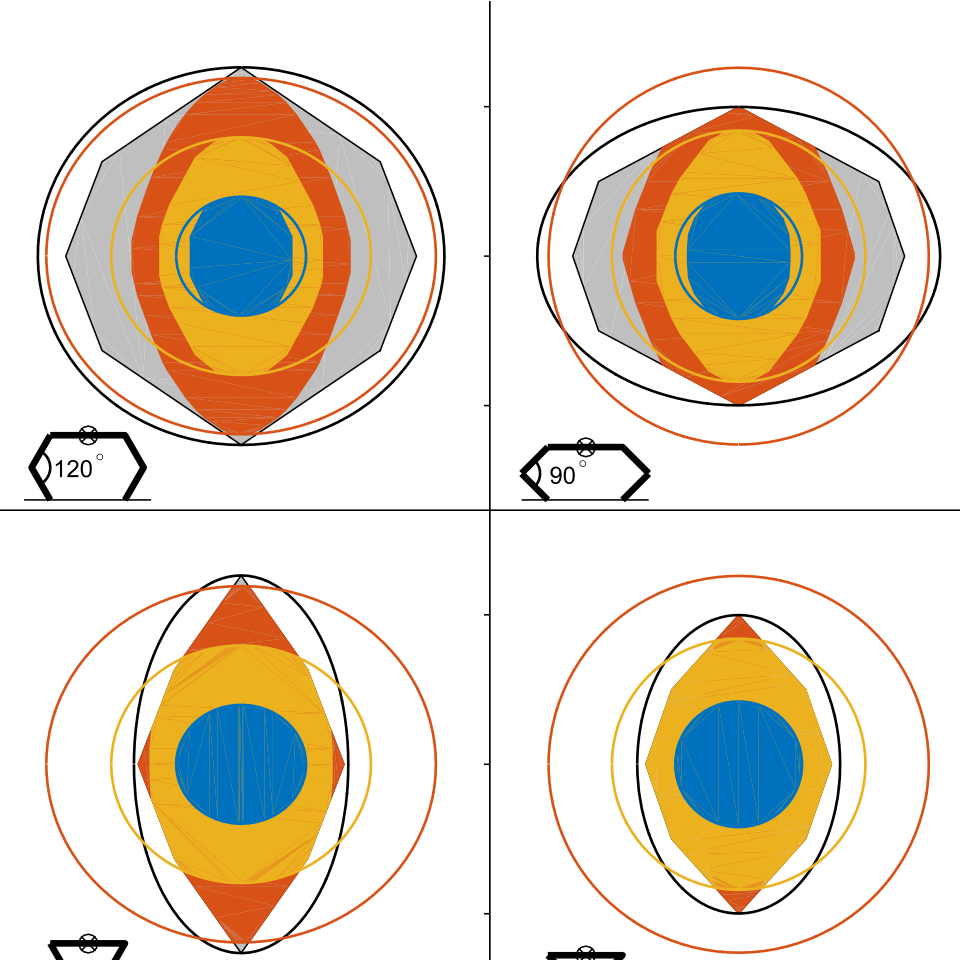
abstract = {Stairways, public transport and inclined walkways are often considered as sites with higher likelihood of falls due to a sudden loss of balance. Such sites are usually marked with warning signs, equipped with non-slip surfaces and handles or handrails to avert or decrease this likelihood. Especially, handles are supposed to provide additional support in cases of a sudden loss of balance. However, the mechanisms of using handles for balance at different heights are not yet fully disclosed. We simulated full body perturbations by applying an anterior force to the waist and investigated effectiveness and mechanisms of balance recovery in five different postures: step stance and normal stance with or without holding handles at different heights. Results indicate that both step stance and holding handles at different vertical positions sufficiently assist balance recovery, compared to normal stance. While there was no significant effect of handle in CoM displacement, the shoulder height handle required the lowest handle force, indicating a difference in using the handle. Practitioner summary: To investigate handle use for balance recovery, we perturbed healthy young adults in different standing positions. Even though the use of different handles had a similar effect, the lowest forces were exerted on the shoulder height handle indicating a preferred handle position for balance recovery. Abbreviation: AP: antero-posterior; CNS: Central nervous system; CoM: Center of Mass; CoMmax: Maximal displacement of the center of mass; CoP: Center of pressure; FHmax: Maximal resultant force exerted on the handle; hFHmax: Maximal horizontal force exerted on the handle; vFHmax; Maximal vertical force exerted on the handle; M1-M8: Perturbation force magnitude.},
keywords = {Human Motor Control, Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Stairways, public transport and inclined walkways are often considered as sites with higher likelihood of falls due to a sudden loss of balance. Such sites are usually marked with warning signs, equipped with non-slip surfaces and handles or handrails to avert or decrease this likelihood. Especially, handles are supposed to provide additional support in cases of a sudden loss of balance. However, the mechanisms of using handles for balance at different heights are not yet fully disclosed. We simulated full body perturbations by applying an anterior force to the waist and investigated effectiveness and mechanisms of balance recovery in five different postures: step stance and normal stance with or without holding handles at different heights. Results indicate that both step stance and holding handles at different vertical positions sufficiently assist balance recovery, compared to normal stance. While there was no significant effect of handle in CoM displacement, the shoulder height handle required the lowest handle force, indicating a difference in using the handle. Practitioner summary: To investigate handle use for balance recovery, we perturbed healthy young adults in different standing positions. Even though the use of different handles had a similar effect, the lowest forces were exerted on the shoulder height handle indicating a preferred handle position for balance recovery. Abbreviation: AP: antero-posterior; CNS: Central nervous system; CoM: Center of Mass; CoMmax: Maximal displacement of the center of mass; CoP: Center of pressure; FHmax: Maximal resultant force exerted on the handle; hFHmax: Maximal horizontal force exerted on the handle; vFHmax; Maximal vertical force exerted on the handle; M1-M8: Perturbation force magnitude.

Gorjan, Daša; Bellicha, Angelina; Čamernik, Jernej; Bachta, Wael; Babič, Jan
Postural control during induced stabilization of the center of mass and light touch Proceedings Article
In: 2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book, pp. 572–573, Edinburgh, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance
@inproceedings{Gorjan2019b,
title = {Postural control during induced stabilization of the center of mass and light touch},
author = {Da\v{s}a Gorjan and Angelina Bellicha and Jernej \v{C}amernik and Wael Bachta and Jan Babi\v{c}},
year = {2019},
date = {2019-01-01},
booktitle = {2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book},
pages = {572--573},
address = {Edinburgh},
abstract = {Conference poster},
keywords = {Human Motor Control, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Conference poster
2018

Šarabon, Nejc; Mekjavić, Igor B; Eiken, Ola; Babič, Jan
The Effect of Bed Rest and Hypoxic Environment on Postural Balance and Trunk Automatic (Re)Actions in Young Healthy Males Journal Article
In: Frontiers in Physiology, vol. 9, pp. 27, 2018, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Muscle Mechanics, Postural Balance | Links:
@article{Sarabon2018,
title = {The Effect of Bed Rest and Hypoxic Environment on Postural Balance and Trunk Automatic (Re)Actions in Young Healthy Males},
author = {Nejc \v{S}arabon and Igor B Mekjavi\'{c} and Ola Eiken and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fphys.2018.00027/full},
doi = {10.3389/fphys.2018.00027},
issn = {1664-042X},
year = {2018},
date = {2018-01-01},
journal = {Frontiers in Physiology},
volume = {9},
pages = {27},
publisher = {Frontiers},
abstract = {Prolonged inactivity, such as bed rest induces several detrimental changes within a short timeframe. Impaired postural balance and responses of trunk muscles to (un)expected perturbations were both shown to be impaired after bed rest. Certain populations (e.g. astronauts) are exposed to hypoxic environment in addition to inactivity, similar to bed rest. While the isolated negative effects of hypoxia on postural balance have been observed before, no study to date has examined the combined effects of hypoxia and bed rest on postural balance or trunk muscle responses. In this study, we examined the effects of 21-day exposure to three conditions: (i) bed rest in hypoxic environment (HBR), (ii) bed rest in normoxic environment (NBR), and (iii) ambulatory hypoxic environment (HAMB). Fourteen healthy male subjects crossed over between conditions in a randomized order, with a 4 month break between conditions to ensure full recovery. Most body sway parameters indicated a similar deterioration of postural balance following both HBR and NBR. Similarly, both anticipatory and reactive responses of the trunk muscles (m. erector spinae and m. multifidus) were impaired after HBR and NBR to a similar degree and mostly unchanged after HAMB. Certain body sway parameters were impaired after HAMB, confirming that hypoxia alone can undermine postural balance. On the other hand, some trunk responses were improved after HAMB. In conclusion, the results of our study confirmed previous findings on negative effects of bed rest, but showed little or no additional effect of hypoxia during bed rest. Physical activity during bed rest is encouraged to preserve neuromuscular functions of the trunk. While the HBR condition in our study resembled conditions during space missions, our results could be relevant to other populations, such as patients with pulmonary diseases exposed to bed rest.},
keywords = {Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Prolonged inactivity, such as bed rest induces several detrimental changes within a short timeframe. Impaired postural balance and responses of trunk muscles to (un)expected perturbations were both shown to be impaired after bed rest. Certain populations (e.g. astronauts) are exposed to hypoxic environment in addition to inactivity, similar to bed rest. While the isolated negative effects of hypoxia on postural balance have been observed before, no study to date has examined the combined effects of hypoxia and bed rest on postural balance or trunk muscle responses. In this study, we examined the effects of 21-day exposure to three conditions: (i) bed rest in hypoxic environment (HBR), (ii) bed rest in normoxic environment (NBR), and (iii) ambulatory hypoxic environment (HAMB). Fourteen healthy male subjects crossed over between conditions in a randomized order, with a 4 month break between conditions to ensure full recovery. Most body sway parameters indicated a similar deterioration of postural balance following both HBR and NBR. Similarly, both anticipatory and reactive responses of the trunk muscles (m. erector spinae and m. multifidus) were impaired after HBR and NBR to a similar degree and mostly unchanged after HAMB. Certain body sway parameters were impaired after HAMB, confirming that hypoxia alone can undermine postural balance. On the other hand, some trunk responses were improved after HAMB. In conclusion, the results of our study confirmed previous findings on negative effects of bed rest, but showed little or no additional effect of hypoxia during bed rest. Physical activity during bed rest is encouraged to preserve neuromuscular functions of the trunk. While the HBR condition in our study resembled conditions during space missions, our results could be relevant to other populations, such as patients with pulmonary diseases exposed to bed rest.
Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Understanding Human Adaptation in Squat-to-Stand movements Proceedings Article
In: 2018 Türkiye Robotbilim Konferansi, TORK 2018, pp. 245–247, Istanbul, 2018.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning
@inproceedings{Camernik2018,
title = {Understanding Human Adaptation in Squat-to-Stand movements},
author = {Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2018},
date = {2018-01-01},
booktitle = {2018 T\"{u}rkiye Robotbilim Konferansi, TORK 2018},
pages = {245--247},
address = {Istanbul},
abstract = {We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.
2017
Azad, Morteza; Babič, Jan; Mistry, Michael
Dynamic manipulability of the center of mass: A tool to study, analyse and measure physical ability of robots Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 3484–3490, IEEE, 2017, ISBN: 978-1-5090-4633-1.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2017,
title = {Dynamic manipulability of the center of mass: A tool to study, analyse and measure physical ability of robots},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {https://ieeexplore.ieee.org/document/7989398/},
doi = {10.1109/ICRA.2017.7989398},
isbn = {978-1-5090-4633-1},
year = {2017},
date = {2017-05-01},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {3484--3490},
publisher = {IEEE},
abstract = {This paper introduces dynamic manipulability of the center of mass (CoM) as a metric to measure robots' phys- ical abilities to accelerate their CoMs in different directions. By decomposing the effects of velocity dependent constraints, such as unilateral contacts and friction cones, CoM dynamic manipulability is defined as a velocity independent metric which depends only on robot's configuration and inertial parameters. Thus, this metric is independent of any choice of controller and expresses only physical abilities of robots. This important property makes the proposed metric a proper tool to study, analyse and design current and future robots. The outcome of the CoM dynamic manipulability analysis in this paper is an ellipsoid in the CoM acceleration space which graphically shows accessible points due to the unit weighted norm of joint torques. Physical meanings and concepts of two reasonable choices for the weighting matrix, which is used in the weighted norm of joint torques, are discussed and illustrative examples are presented. Since the proposed metric measures physical ability to accelerate the CoM, it is claimed to be a suitable tool to study balance ability of legged robots.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper introduces dynamic manipulability of the center of mass (CoM) as a metric to measure robots' phys- ical abilities to accelerate their CoMs in different directions. By decomposing the effects of velocity dependent constraints, such as unilateral contacts and friction cones, CoM dynamic manipulability is defined as a velocity independent metric which depends only on robot's configuration and inertial parameters. Thus, this metric is independent of any choice of controller and expresses only physical abilities of robots. This important property makes the proposed metric a proper tool to study, analyse and design current and future robots. The outcome of the CoM dynamic manipulability analysis in this paper is an ellipsoid in the CoM acceleration space which graphically shows accessible points due to the unit weighted norm of joint torques. Physical meanings and concepts of two reasonable choices for the weighting matrix, which is used in the weighted norm of joint torques, are discussed and illustrative examples are presented. Since the proposed metric measures physical ability to accelerate the CoM, it is claimed to be a suitable tool to study balance ability of legged robots.
Frelih, Nina Gržinič; Podlesek, Anja; Babič, Jan; Geršak, Gregor
Evaluation of psychological effects on human postural stability Journal Article
In: Measurement, vol. 98, pp. 186–191, 2017, ISSN: 02632241.
Abstract | BibTeX | Tags: Postural Balance | Links:
@article{GrzinicFrelih2017,
title = {Evaluation of psychological effects on human postural stability},
author = {Nina {Gr\v{z}ini\v{c} Frelih} and Anja Podlesek and Jan Babi\v{c} and Gregor Ger\v{s}ak},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0263224116306844},
doi = {10.1016/j.measurement.2016.11.039},
issn = {02632241},
year = {2017},
date = {2017-01-01},
journal = {Measurement},
volume = {98},
pages = {186--191},
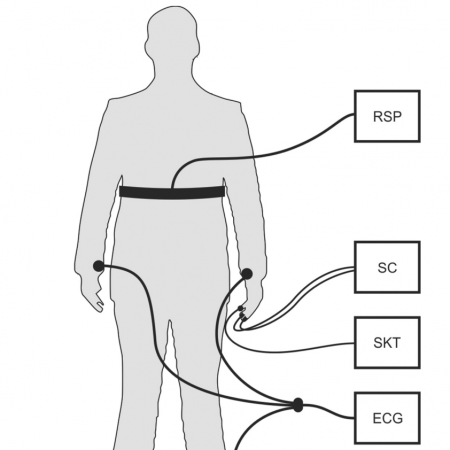
abstract = {Human postural stability is commonly assessed by a set of posturographic tests during quiet upright standing. Numerous studies extend these tests with cognitive and mental tasks where various physiological and biomechanical sensors are used in combination with a force plate. The aim of our study was to determine whether psychological effects of sensor attachment and the awareness of the subject being measured could influence the posturographic tests performed using the force plate. An experiment was performed where complete data from 51 participants (13 women and 38 men) were obtained in four different conditions. Posturographic tests were performed either with eyes open or eyes closed, and either with biomedical instrumentation sensors attached or not attached. The results indicate that the presence of biomedical instrumentation sensors had a statistically significant impact on the centre of pressure path length and ellipse area as well as on the perceived difficulty of the task and its pleasantness. We conclude that the attachment of sensors on the body of the participants during biomechanical experiments significantly affects the perception of the experimental situation and alters the output of posturographic tests. It is therefore important to appropriately take into account the possible effects of psychological strain (such as the awareness of being measured) in the experimental design and in the interpretation of the results.},
keywords = {Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Human postural stability is commonly assessed by a set of posturographic tests during quiet upright standing. Numerous studies extend these tests with cognitive and mental tasks where various physiological and biomechanical sensors are used in combination with a force plate. The aim of our study was to determine whether psychological effects of sensor attachment and the awareness of the subject being measured could influence the posturographic tests performed using the force plate. An experiment was performed where complete data from 51 participants (13 women and 38 men) were obtained in four different conditions. Posturographic tests were performed either with eyes open or eyes closed, and either with biomedical instrumentation sensors attached or not attached. The results indicate that the presence of biomedical instrumentation sensors had a statistically significant impact on the centre of pressure path length and ellipse area as well as on the perceived difficulty of the task and its pleasantness. We conclude that the attachment of sensors on the body of the participants during biomechanical experiments significantly affects the perception of the experimental situation and alters the output of posturographic tests. It is therefore important to appropriately take into account the possible effects of psychological strain (such as the awareness of being measured) in the experimental design and in the interpretation of the results.

Potočanac, Zrinka; Goljat, Rok; Babič, Jan
A robotic system for delivering novel real-time, movement dependent perturbations Journal Article
In: Gait & Posture, vol. 58, pp. 386–389, 2017, ISSN: 09666362.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance, Robot Design | Links:
@article{Potocanac2017,
title = {A robotic system for delivering novel real-time, movement dependent perturbations},
author = {Zrinka Poto\v{c}anac and Rok Goljat and Jan Babi\v{c}},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0966636217308949},
doi = {10.1016/j.gaitpost.2017.08.038},
issn = {09666362},
year = {2017},
date = {2017-01-01},
journal = {Gait \& Posture},
volume = {58},
pages = {386--389},
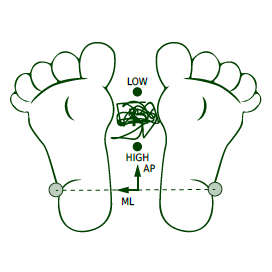
abstract = {Perturbations are often used to study movement control and balance, especially in the context of falling. Most often, discrete perturbations defined prior to the experiment are used to mimic external disturbances to balance. However, the largest proportion of falls is due to self-generated errors in weight shifting. Inspired by self-generated weight shifting errors, we created a novel, continuous mediolateral perturbation proportional to subjects' mediolateral center of mass movement with minimal delays. This perturbation was delivered by a robotic platform controlled by a real time Matlab Simulink model using kinematic data from a marker positioned at subjects' L5 as input. Fifteen healthy young adults stood as still as possible atop the robotic platform with their eyes closed. We evaluated the performance of the perturbation in terms of accuracy and delay relative to the input signal by using cross-correlations. The perturbations were accurate (r = −0.984), with delays of 154 ms. Such systematic perturbation significantly affected mediolateral sway, increasing its range (from 5.56 ± 3.72 to 9.58 ± 4.83 mm},
keywords = {Human Motor Control, Postural Balance, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Perturbations are often used to study movement control and balance, especially in the context of falling. Most often, discrete perturbations defined prior to the experiment are used to mimic external disturbances to balance. However, the largest proportion of falls is due to self-generated errors in weight shifting. Inspired by self-generated weight shifting errors, we created a novel, continuous mediolateral perturbation proportional to subjects' mediolateral center of mass movement with minimal delays. This perturbation was delivered by a robotic platform controlled by a real time Matlab Simulink model using kinematic data from a marker positioned at subjects' L5 as input. Fifteen healthy young adults stood as still as possible atop the robotic platform with their eyes closed. We evaluated the performance of the perturbation in terms of accuracy and delay relative to the input signal by using cross-correlations. The perturbations were accurate (r = −0.984), with delays of 154 ms. Such systematic perturbation significantly affected mediolateral sway, increasing its range (from 5.56 ± 3.72 to 9.58 ± 4.83 mm
2016
Čamernik, Jernej; Potočanac, Zrinka; Peternel, Luka; Babič, Jan
Holding a Handle for Balance during Continuous Postural Perturbations—Immediate and Transitionary Effects on Whole Body Posture Journal Article
In: Frontiers in Human Neuroscience, vol. 10, pp. 486, 2016, ISSN: 1662-5161.
Abstract | BibTeX | Tags: Ergonomy, Postural Balance, Sensorimotor Learning | Links:
@article{Camernik2016,
title = {Holding a Handle for Balance during Continuous Postural Perturbations\textemdashImmediate and Transitionary Effects on Whole Body Posture},
author = {Jernej \v{C}amernik and Zrinka Poto\v{c}anac and Luka Peternel and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fnhum.2016.00486},
doi = {10.3389/fnhum.2016.00486},
issn = {1662-5161},
year = {2016},
date = {2016-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {10},
pages = {486},
publisher = {Frontiers},
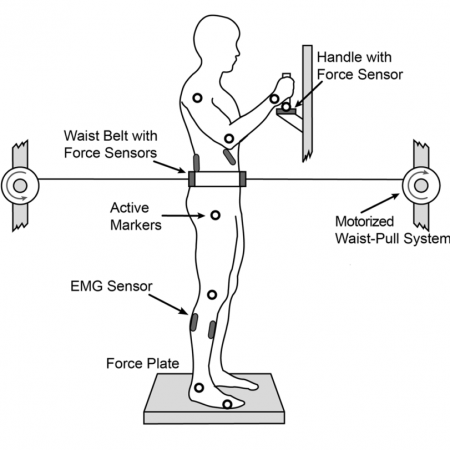
abstract = {When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.},
keywords = {Ergonomy, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.
2014
Azad, Morteza; Babič, Jan; Mistry, Michael
Effects of hand contact on the stability of a planar humanoid with a momentum based controller Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 348–353, IEEE, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2014,
title = {Effects of hand contact on the stability of a planar humanoid with a momentum based controller},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {http://ieeexplore.ieee.org/document/7041383/},
doi = {10.1109/HUMANOIDS.2014.7041383},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-11-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {348--353},
publisher = {IEEE},
abstract = {This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.
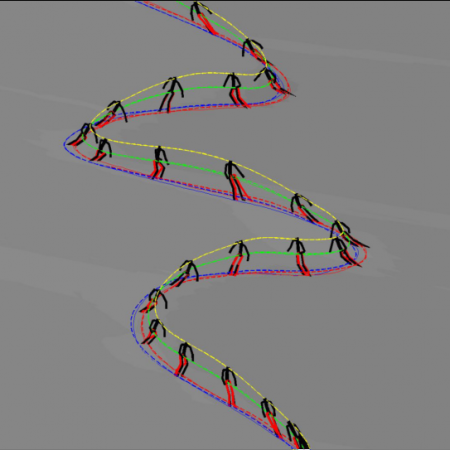
Nemec, Bojan; Petrič, Tadej; Babič, Jan; Supej, Matej
Estimation of Alpine Skier Posture Using Machine Learning Techniques Journal Article
In: Sensors, vol. 14, no. 10, pp. 18898–18914, 2014, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Machine Learning, Postural Balance, Sport | Links:
@article{Nemec2014,
title = {Estimation of Alpine Skier Posture Using Machine Learning Techniques},
author = {Bojan Nemec and Tadej Petri\v{c} and Jan Babi\v{c} and Matej Supej},
url = {https://www.mdpi.com/1424-8220/14/10/18898},
doi = {10.3390/s141018898},
issn = {1424-8220},
year = {2014},
date = {2014-10-01},
journal = {Sensors},
volume = {14},
number = {10},
pages = {18898--18914},
abstract = {High precision Global Navigation Satellite System (GNSS) measurements are becoming more and more popular in alpine skiing due to the relatively undemanding setup and excellent performance. However, GNSS provides only single-point measurements that are defined with the antenna placed typically behind the skier's neck. A key issue is how to estimate other more relevant parameters of the skier's body, like the center of mass (COM) and ski trajectories. Previously, these parameters were estimated by modeling the skier's body with an inverted-pendulum model that oversimplified the skier's body. In this study, we propose two machine learning methods that overcome this shortcoming and estimate COM and skis trajectories based on a more faithful approximation of the skier's body with nine degrees-of-freedom. The first method utilizes a well-established approach of artificial neural networks, while the second method is based on a state-of-the-art statistical generalization method. Both methods were evaluated using the reference measurements obtained on a typical giant slalom course and compared with the inverted-pendulum method. Our results outperform the results of commonly used inverted-pendulum methods and demonstrate the applicability of machine learning techniques in biomechanical measurements of alpine skiing.},
keywords = {Machine Learning, Postural Balance, Sport},
pubstate = {published},
tppubtype = {article}
}
High precision Global Navigation Satellite System (GNSS) measurements are becoming more and more popular in alpine skiing due to the relatively undemanding setup and excellent performance. However, GNSS provides only single-point measurements that are defined with the antenna placed typically behind the skier's neck. A key issue is how to estimate other more relevant parameters of the skier's body, like the center of mass (COM) and ski trajectories. Previously, these parameters were estimated by modeling the skier's body with an inverted-pendulum model that oversimplified the skier's body. In this study, we propose two machine learning methods that overcome this shortcoming and estimate COM and skis trajectories based on a more faithful approximation of the skier's body with nine degrees-of-freedom. The first method utilizes a well-established approach of artificial neural networks, while the second method is based on a state-of-the-art statistical generalization method. Both methods were evaluated using the reference measurements obtained on a typical giant slalom course and compared with the inverted-pendulum method. Our results outperform the results of commonly used inverted-pendulum methods and demonstrate the applicability of machine learning techniques in biomechanical measurements of alpine skiing.
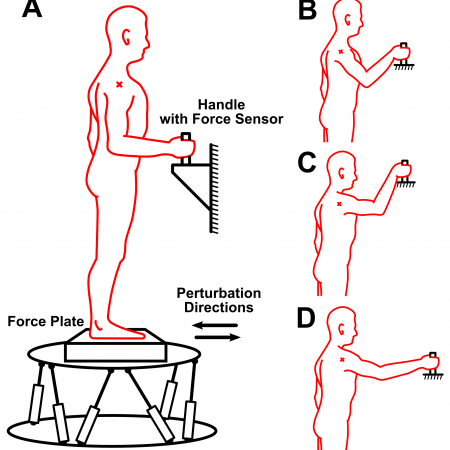
Babič, Jan; Petrič, Tadej; Peternel, Luka; Šarabon, Nejc
Effects of supportive hand contact on reactive postural control during support perturbations Journal Article
In: Gait & Posture, vol. 40, no. 3, pp. 441–446, 2014, ISSN: 09666362.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2014,
title = {Effects of supportive hand contact on reactive postural control during support perturbations},
author = {Jan Babi\v{c} and Tadej Petri\v{c} and Luka Peternel and Nejc \v{S}arabon},
url = {http://www.sciencedirect.com/science/article/pii/S096663621400544X},
doi = {10.1016/j.gaitpost.2014.05.012},
issn = {09666362},
year = {2014},
date = {2014-01-01},
journal = {Gait \& Posture},
volume = {40},
number = {3},
pages = {441--446},
abstract = {There are many everyday situations in which a supportive hand contact is required for an individual to counteract various postural perturbations. By emulating situations when balance of an individual is challenged, we examined functional role of supportive hand contact at different locations where balance of an individual was perturbed by translational perturbations of the support surface. We examined the effects of handle location, perturbation direction and perturbation intensity on the postural control and the forces generated in the handle. There were significantly larger centre-of-pressure (CoP) displacements for perturbations in posterior direction than for perturbations in anterior direction. Besides, the perturbation intensity significantly affected the peak CoP displacement in both perturbation directions. However, the position of the handle had no effects on the peak CoP displacement. On the contrary, there were significant effects of perturbation direction, perturbation intensity and handle position on the maximal force in the handle. The effect of the handle position was significant for the perturbations in posterior direction where the lowest maximal forces were recorded in the handle located at the shoulder height. They were comparable to the forces in the handle at eye height and significantly lower than the forces in the handle located either lower or further away from the shoulder. In summary, our results indicate that although the location of a supportive hand contact has no effect on the peak CoP displacement of healthy individuals, it affects the forces that an individual needs to exert on the handle in order to counteract support perturbations.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
There are many everyday situations in which a supportive hand contact is required for an individual to counteract various postural perturbations. By emulating situations when balance of an individual is challenged, we examined functional role of supportive hand contact at different locations where balance of an individual was perturbed by translational perturbations of the support surface. We examined the effects of handle location, perturbation direction and perturbation intensity on the postural control and the forces generated in the handle. There were significantly larger centre-of-pressure (CoP) displacements for perturbations in posterior direction than for perturbations in anterior direction. Besides, the perturbation intensity significantly affected the peak CoP displacement in both perturbation directions. However, the position of the handle had no effects on the peak CoP displacement. On the contrary, there were significant effects of perturbation direction, perturbation intensity and handle position on the maximal force in the handle. The effect of the handle position was significant for the perturbations in posterior direction where the lowest maximal forces were recorded in the handle located at the shoulder height. They were comparable to the forces in the handle at eye height and significantly lower than the forces in the handle located either lower or further away from the shoulder. In summary, our results indicate that although the location of a supportive hand contact has no effect on the peak CoP displacement of healthy individuals, it affects the forces that an individual needs to exert on the handle in order to counteract support perturbations.
2013
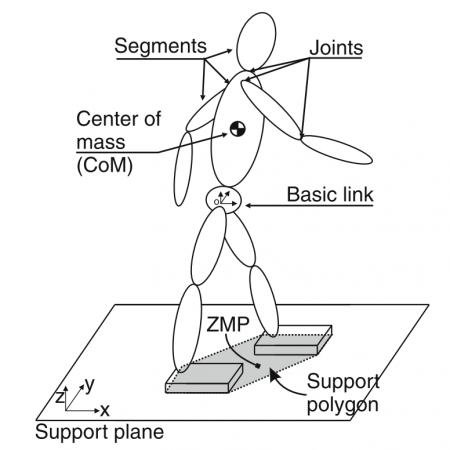
Petrič, Tadej; Gams, Andrej; Babič, Jan; Žlajpah, Leon
Reflexive stability control framework for humanoid robots Journal Article
In: Autonomous Robots, vol. 34, no. 4, pp. 347–361, 2013, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Postural Balance | Links:
@article{Petric2013,
title = {Reflexive stability control framework for humanoid robots},
author = {Tadej Petri\v{c} and Andrej Gams and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {http://link.springer.com/10.1007/s10514-013-9329-0},
doi = {10.1007/s10514-013-9329-0},
issn = {0929-5593},
year = {2013},
date = {2013-01-01},
journal = {Autonomous Robots},
volume = {34},
number = {4},
pages = {347--361},
abstract = {In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.
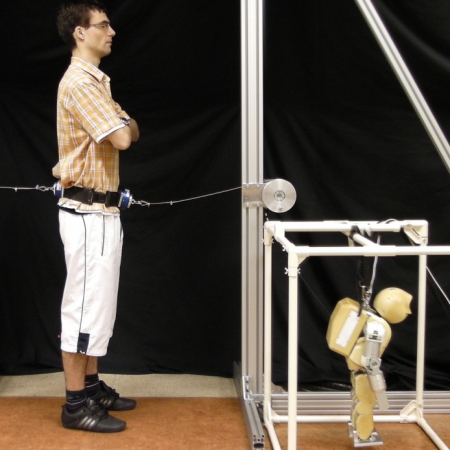
Peternel, Luka; Babič, Jan
Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability Proceedings Article
In: 2013 IEEE International Conference on Robotics and Automation, pp. 5329–5334, IEEE, Karlsruhe, 2013, ISBN: 978-1-4673-5643-5.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning | Links:
@inproceedings{Peternel2013a,
title = {Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6631340/},
doi = {10.1109/ICRA.2013.6631340},
isbn = {978-1-4673-5643-5},
year = {2013},
date = {2013-01-01},
booktitle = {2013 IEEE International Conference on Robotics and Automation},
pages = {5329--5334},
publisher = {IEEE},
address = {Karlsruhe},
abstract = {In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.},
keywords = {Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.
2012
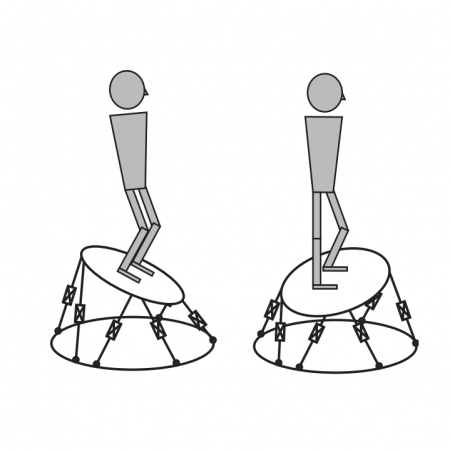
Babič, Jan; Škorja, Goran
Analysis of musculoskeletal system responses to pertrubations during standing posture Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 79, no. 1-2, pp. 7–12, 2012, ISSN: 00135852.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2012,
title = {Analysis of musculoskeletal system responses to pertrubations during standing posture},
author = {Jan Babi\v{c} and Goran \v{S}korja},
url = {http://ev.fe.uni-lj.si/1-2-2012/Babic.pdf},
issn = {00135852},
year = {2012},
date = {2012-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {79},
number = {1-2},
pages = {7--12},
abstract = {The purpose of the study is to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. We used an enhanced experimental approach compared to the traditionally used methods in the previous studies by other researchers where the support surface beneath the subject's feet randomly perturbed the equilibrium. Instead of a predetermined motion of the support surface that would cause the perturbation of the subject's equilibrium, we perturbed the equilibrium by a Stewart parallel platform. Mounted on the platform, a force plate was recording the motion of the centre-of-mass projection during the experiment. This setup enabled the subjects to actively control the orientation of the parallel platform by shifting the position of their centre-of-mass during the experiment. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses to the visual stimuli. Compared to the results of the previous studies, muscular activities during the stretch and proprioceptive reflex are more equally distributed in all directions. Based on the motion of the subjects that we recorded using the motion capture system, we determined whether the muscles were stretching or extending during the responses to the perturbations. We also show the effectiveness of the muscles to compensate the perturbations in different directions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The purpose of the study is to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. We used an enhanced experimental approach compared to the traditionally used methods in the previous studies by other researchers where the support surface beneath the subject's feet randomly perturbed the equilibrium. Instead of a predetermined motion of the support surface that would cause the perturbation of the subject's equilibrium, we perturbed the equilibrium by a Stewart parallel platform. Mounted on the platform, a force plate was recording the motion of the centre-of-mass projection during the experiment. This setup enabled the subjects to actively control the orientation of the parallel platform by shifting the position of their centre-of-mass during the experiment. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses to the visual stimuli. Compared to the results of the previous studies, muscular activities during the stretch and proprioceptive reflex are more equally distributed in all directions. Based on the motion of the subjects that we recorded using the motion capture system, we determined whether the muscles were stretching or extending during the responses to the perturbations. We also show the effectiveness of the muscles to compensate the perturbations in different directions.
2011
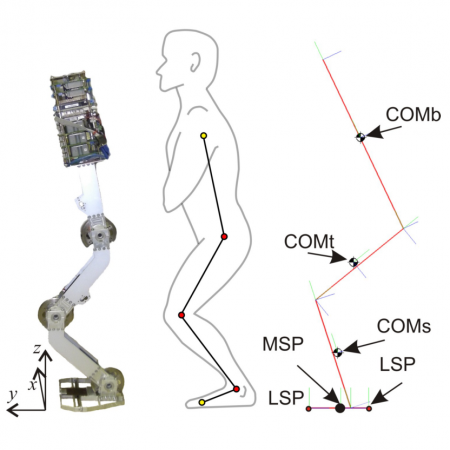
Gams, Andrej; Petrič, Tadej; Babič, Jan; Žlajpah, Leon; Ude, Aleš
Constraining movement imitation with reflexive behavior: Robot squatting Proceedings Article
In: 2011 11th IEEE-RAS International Conference on Humanoid Robots, pp. 294–299, IEEE, Bled, 2011, ISBN: 978-1-61284-868-6.
Abstract | BibTeX | Tags: Dynamic Motion, Postural Balance | Links:
@inproceedings{Gams2011,
title = {Constraining movement imitation with reflexive behavior: Robot squatting},
author = {Andrej Gams and Tadej Petri\v{c} and Jan Babi\v{c} and Leon \v{Z}lajpah and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/6100816/},
doi = {10.1109/Humanoids.2011.6100816},
isbn = {978-1-61284-868-6},
year = {2011},
date = {2011-10-01},
booktitle = {2011 11th IEEE-RAS International Conference on Humanoid Robots},
pages = {294--299},
publisher = {IEEE},
address = {Bled},
abstract = {Direct imitation of human movement with a hu- manoid robot, which has a similar kinematic structure, does not guarantee a successful completion of the task because of different dynamical properties. Our research starts by showing how to apply a generalization algorithm to extract the desired movement primitives from multiple human demonstrations. The emphasis of the paper is on a method that constrains the extracted movement primitives when mapping them to a robot, taking into account a critical criterion of the task. As a practical example we study the stability of a robot, which is determined through a normalized zero-moment-point. Our approach is based on prioritized task control and allows direct movement transfer as long as the selected criterion is met. It only constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has higher priority than the desired, conscious movement. We demonstrate the properties of the algorithm on a real, human- inspired leg robot developed in our laboratory.},
keywords = {Dynamic Motion, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Direct imitation of human movement with a hu- manoid robot, which has a similar kinematic structure, does not guarantee a successful completion of the task because of different dynamical properties. Our research starts by showing how to apply a generalization algorithm to extract the desired movement primitives from multiple human demonstrations. The emphasis of the paper is on a method that constrains the extracted movement primitives when mapping them to a robot, taking into account a critical criterion of the task. As a practical example we study the stability of a robot, which is determined through a normalized zero-moment-point. Our approach is based on prioritized task control and allows direct movement transfer as long as the selected criterion is met. It only constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has higher priority than the desired, conscious movement. We demonstrate the properties of the algorithm on a real, human- inspired leg robot developed in our laboratory.
2010

Škorja, Goran; Babič, Jan
Implementation of the three degrees-of-freedom parallel platform in human posture analysis Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 321–326, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Postural Balance, Robot Design | Links:
@inproceedings{Skorja2010a,
title = {Implementation of the three degrees-of-freedom parallel platform in human posture analysis},
author = {Goran \v{S}korja and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/5524566/},
doi = {10.1109/RAAD.2010.5524566},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-06-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {321--326},
publisher = {IEEE},
address = {Budapest},
abstract = {The purpose of this study was to implement a three degrees-of-freedom inclining parallel platform to provide postural perturbations for examining human balance during the standing posture. The inclining parallel platform was capable of generating random rotation disturbances in sixteen different directions. By measuring the projection of the subject's centre of mass with a force plate mounted on top of the parallel platform, we had the ability to control the parallel platform rotation in a real time.},
keywords = {Postural Balance, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
The purpose of this study was to implement a three degrees-of-freedom inclining parallel platform to provide postural perturbations for examining human balance during the standing posture. The inclining parallel platform was capable of generating random rotation disturbances in sixteen different directions. By measuring the projection of the subject's centre of mass with a force plate mounted on top of the parallel platform, we had the ability to control the parallel platform rotation in a real time.
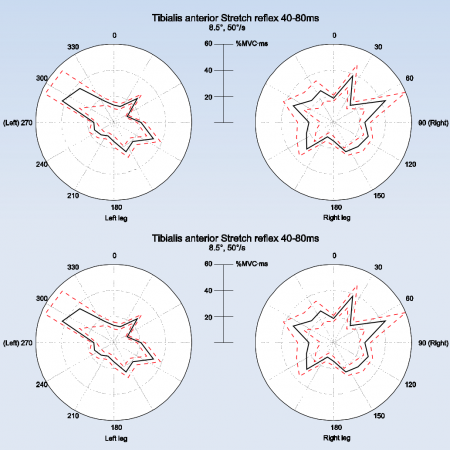
Škorja, Goran; Babič, Jan
Postural Control Analysis during Angular Perturbations of the Support Surface Book Section
In: Lim, Chwee T; Goh, James C H (Ed.): IFMBE Proceedings, vol. 31 IFMBE, pp. 969–972, Springer, 2010, ISSN: 16800737.
Abstract | BibTeX | Tags: Muscle Mechanics, Postural Balance | Links:
@incollection{Skorja2010,
title = {Postural Control Analysis during Angular Perturbations of the Support Surface},
author = {Goran \v{S}korja and Jan Babi\v{c}},
editor = {Chwee T Lim and James C H Goh},
url = {http://link.springer.com/10.1007/978-3-642-14515-5_247},
doi = {10.1007/978-3-642-14515-5_247},
issn = {16800737},
year = {2010},
date = {2010-01-01},
booktitle = {IFMBE Proceedings},
volume = {31 IFMBE},
pages = {969--972},
publisher = {Springer},
abstract = {The purpose of the study was to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. Instead of a simple tilting platform to induce rotational perturbations of the support surface used in the previous studies, we used a Stewart parallel platform with an integrated force platform that enabled the subjects to actively control the orientation of the platform by shifting their centre of mass position. In contrast to the previous studies where the muscular responses had no effect on the motion of the subject and were in some sense isometric responses, our reported muscular responses result in the motion of the subject's body and are therefore a better approximation to the real-world situations. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses based on the visual stimuli. We also showed the effectiveness of the muscles to counter the perturbations in different directions. The results show that the perturbations in anterior-posterior direction were compensated more efficiently than the perturbations in medial-lateral direction.},
keywords = {Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {incollection}
}
The purpose of the study was to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. Instead of a simple tilting platform to induce rotational perturbations of the support surface used in the previous studies, we used a Stewart parallel platform with an integrated force platform that enabled the subjects to actively control the orientation of the platform by shifting their centre of mass position. In contrast to the previous studies where the muscular responses had no effect on the motion of the subject and were in some sense isometric responses, our reported muscular responses result in the motion of the subject's body and are therefore a better approximation to the real-world situations. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses based on the visual stimuli. We also showed the effectiveness of the muscles to counter the perturbations in different directions. The results show that the perturbations in anterior-posterior direction were compensated more efficiently than the perturbations in medial-lateral direction.
2001
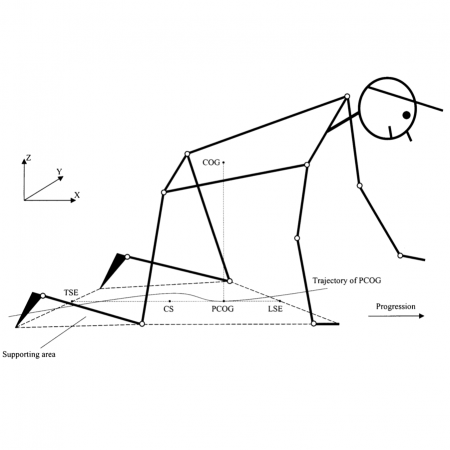
Babič, Jan; Karčnik, Tomaž; Bajd, Tadej
Stability analysis of four-point walking Journal Article
In: Gait & Posture, vol. 14, no. 1, pp. 56–60, 2001, ISSN: 09666362.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2001,
title = {Stability analysis of four-point walking},
author = {Jan Babi\v{c} and Toma\v{z} Kar\v{c}nik and Tadej Bajd},
url = {https://www.sciencedirect.com/science/article/pii/S0966636201001096},
doi = {10.1016/S0966-6362(01)00109-6},
issn = {09666362},
year = {2001},
date = {2001-01-01},
journal = {Gait \& Posture},
volume = {14},
number = {1},
pages = {56--60},
abstract = {The aim of the experiment reported here was to determine the static and dynamic stability of two-point stance phases when walking on hands and knees at different speeds. In addition, we defined the methods and predicted the consequences of including two-point stance phases into crutch assisted functional electrical stimulation (FES) walking. Crawling on hands and knees was performed at three speeds by five healthy male persons. With twelve joint-position markers placed on the subject, we determined two stability indices for every instant of gait. We analysed the peak values of these two indices during the two-point stance phases. The results indicate that we have to ensure the proper position of the centre of gravity to increase the speed of walking. To reach speeds, lower than 0.6 m/s, it is not necessary to include statically unstable phases. The shift of the centre of gravity towards and across the leading stability edge can result in getting into the dynamically unstable state. Considering the results we can effectively introduce two-point stance phases into crutch assisted FES walking and therefore increase the speed and energy effectiveness of walking},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The aim of the experiment reported here was to determine the static and dynamic stability of two-point stance phases when walking on hands and knees at different speeds. In addition, we defined the methods and predicted the consequences of including two-point stance phases into crutch assisted functional electrical stimulation (FES) walking. Crawling on hands and knees was performed at three speeds by five healthy male persons. With twelve joint-position markers placed on the subject, we determined two stability indices for every instant of gait. We analysed the peak values of these two indices during the two-point stance phases. The results indicate that we have to ensure the proper position of the centre of gravity to increase the speed of walking. To reach speeds, lower than 0.6 m/s, it is not necessary to include statically unstable phases. The shift of the centre of gravity towards and across the leading stability edge can result in getting into the dynamically unstable state. Considering the results we can effectively introduce two-point stance phases into crutch assisted FES walking and therefore increase the speed and energy effectiveness of walking
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si