




2025
Jamšek, Marko; Oklobdžija, Lara Tušek; Vrabič, Rok; Babič, Jan
Implementation of Impedance Control for the EduExo Pro Exoskeleton Book Chapter
In: pp. 253-257, 2025.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inbook{Jamek2025,
title = {Implementation of Impedance Control for the EduExo Pro Exoskeleton},
author = {Marko Jam\v{s}ek and Lara Tu\v{s}ek Oklobd\v{z}ija and Rok Vrabi\v{c} and Jan Babi\v{c}},
doi = {10.1007/978-3-031-77588-8_50},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
pages = {253-257},
abstract = {This paper describes improvements to the EduExo Pro exoskeleton, emphasizing the introduction of impedance control with a Dynamixel servo motor and a Raspberry Pi. This upgrade enhances the system’s ability to support the development of advanced control algorithms, increasing its usefulness for educational purposes. Initial findings indicate a need for friction compensation due to the high gear reduction in the new motor setup. Nevertheless, the upgrades not only
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inbook}
}
This paper describes improvements to the EduExo Pro exoskeleton, emphasizing the introduction of impedance control with a Dynamixel servo motor and a Raspberry Pi. This upgrade enhances the system’s ability to support the development of advanced control algorithms, increasing its usefulness for educational purposes. Initial findings indicate a need for friction compensation due to the high gear reduction in the new motor setup. Nevertheless, the upgrades not only
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.
Prange-Lasonder, Gerdienke B.; Oberschmidt, Kira; Pacifico, Ilaria; Jamšek, Marko; Babič, Jan; Masiero, Federico; Masia, Lorenzo; Smyrli, Katerina; Prinsen, Erik C.
User-Centered Design Approach for Development of an Assistive Soft Exosuit and Initial Results on User Requirements Book Chapter
In: pp. 63-67, 2025.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inbook{Prange-Lasonder2025,
title = {User-Centered Design Approach for Development of an Assistive Soft Exosuit and Initial Results on User Requirements},
author = {Gerdienke B. Prange-Lasonder and Kira Oberschmidt and Ilaria Pacifico and Marko Jam\v{s}ek and Jan Babi\v{c} and Federico Masiero and Lorenzo Masia and Katerina Smyrli and Erik C. Prinsen},
doi = {10.1007/978-3-031-77588-8_13},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
pages = {63-67},
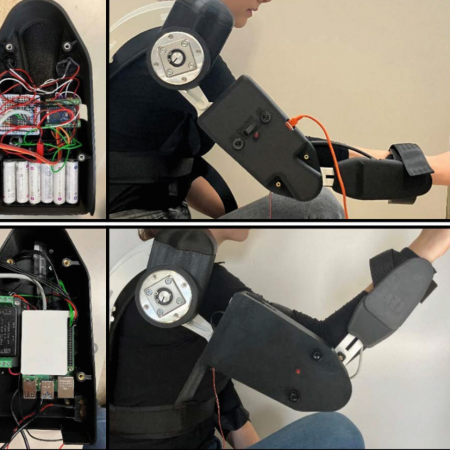
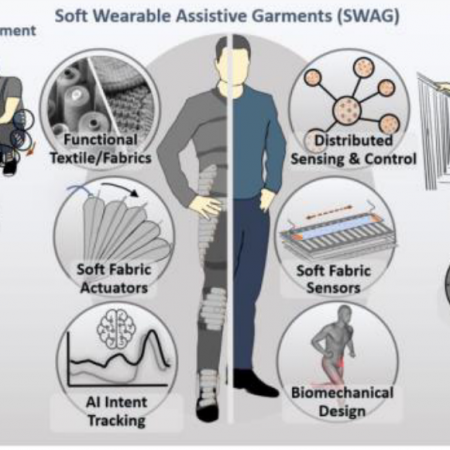
abstract = {To support, and potentially improve, gait-related tasks, wearable robots (WR) are promising, especially soft-WR.
To develop WR that are acceptable for their users, users need to be part of the design and development of WR. In the scope of the SWAG project, a pragmatic Human-Centered Design approach is adopted to develop a soft exosuit suitable for different applications. Accordingly, user requirements were elicited, first generally via a literature review, then specifically targeted towards SWAG via focus groups with users for each use case. Resulting user requirements feed into design and development of the exosuit, regarding the required support, modularity, donning/doffing, look and feel, and comfort. Next step is to test first mock-ups and pre-functional prototypes with users.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inbook}
}
To support, and potentially improve, gait-related tasks, wearable robots (WR) are promising, especially soft-WR.
To develop WR that are acceptable for their users, users need to be part of the design and development of WR. In the scope of the SWAG project, a pragmatic Human-Centered Design approach is adopted to develop a soft exosuit suitable for different applications. Accordingly, user requirements were elicited, first generally via a literature review, then specifically targeted towards SWAG via focus groups with users for each use case. Resulting user requirements feed into design and development of the exosuit, regarding the required support, modularity, donning/doffing, look and feel, and comfort. Next step is to test first mock-ups and pre-functional prototypes with users.
To develop WR that are acceptable for their users, users need to be part of the design and development of WR. In the scope of the SWAG project, a pragmatic Human-Centered Design approach is adopted to develop a soft exosuit suitable for different applications. Accordingly, user requirements were elicited, first generally via a literature review, then specifically targeted towards SWAG via focus groups with users for each use case. Resulting user requirements feed into design and development of the exosuit, regarding the required support, modularity, donning/doffing, look and feel, and comfort. Next step is to test first mock-ups and pre-functional prototypes with users.
2024
Díaz, María Alejandra; Bock, Sander De; Beckerle, Philipp; Babič, Jan; Verstraten, Tom; Pauw, Kevin De
Human-in-the-loop optimization of wearable device parameters using an EMG-based objective function Journal Article
In: Wearable Technologies, vol. 5, pp. e15, 2024.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control | Links:
@article{nokey,
title = {Human-in-the-loop optimization of wearable device parameters using an EMG-based objective function},
author = {Mar\'{i}a Alejandra D\'{i}az and Sander De Bock and Philipp Beckerle and Jan Babi\v{c} and Tom Verstraten and Kevin De Pauw},
url = {https://doi.org/10.1017/wtc.2024.9},
doi = {10.1017/wtc.2024.9},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Wearable Technologies},
volume = {5},
pages = {e15},
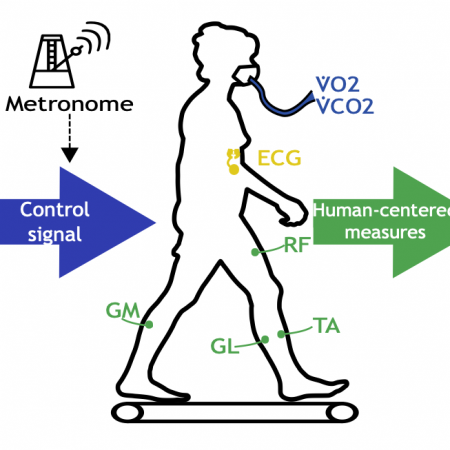
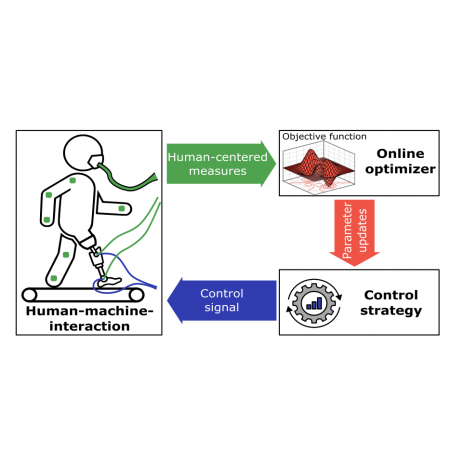
abstract = {Advancements in wearable robots aim to improve user motion, motor control, and overall experience by minimizing energetic cost (EC). However, EC is challenging to measure and it is typically indirectly estimated through respiratory gas analysis. This study introduces a novel EMG-based objective function that captures individuals\' natural energetic expenditure during walking. The objective function combines information from electromyography (EMG) variables such as intensity and muscle synergies. First, we demonstrate the similarity of the proposed objective function, calculated offline, to the EC during walking. Second, we minimize and validate the EMG-based objective function using an online Bayesian optimization algorithm. The walking step frequency is chosen as the parameter to optimize in both offline and online approaches in order to simplify experiments and facilitate comparisons with related research. Compared to existing studies that use EC as the objective function, results demonstrated that the optimization of the presented objective function reduced the number of iterations and, when compared with gradient descent optimization strategies, also reduced convergence time. Moreover, the algorithm effectively converges toward an optimal step frequency near the user\'s preferred frequency, positively influencing EC reduction. The good correlation between the estimated objective function and measured EC highlights its consistency and reliability. Thus, the proposed objective function could potentially optimize lower limb exoskeleton assistance and improve user performance and human-robot interaction without the need for challenging respiratory gas measurements. Impact Statement Wearable devices are important in assisting people, such as patients or older adults, during rehabilitation and everyday activities like walking. Some exoskeletons have been able to reduce the energy cost of walking. However, they require a cumbersome device to quantify it, making it impractical to use in real-life scenarios. Thus, we need to identify a way to assess energetic cost using wearable technologies. To address this, we introduced an EMG-based objective function that captures insights into energetic cost through muscle dynamics and motor coordination. Then, we minimized the proposed objective function online by optimizing walking step frequencies. We found that the EMG-based objective function highly correlates with energetic cost during walking. We also found that our algorithm effectively identifies an optimal step frequency that reduces participants\' energetic cost. These findings will facilitate the customization of the assistance in wearable assistive devices and its application in real situations.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Advancements in wearable robots aim to improve user motion, motor control, and overall experience by minimizing energetic cost (EC). However, EC is challenging to measure and it is typically indirectly estimated through respiratory gas analysis. This study introduces a novel EMG-based objective function that captures individuals' natural energetic expenditure during walking. The objective function combines information from electromyography (EMG) variables such as intensity and muscle synergies. First, we demonstrate the similarity of the proposed objective function, calculated offline, to the EC during walking. Second, we minimize and validate the EMG-based objective function using an online Bayesian optimization algorithm. The walking step frequency is chosen as the parameter to optimize in both offline and online approaches in order to simplify experiments and facilitate comparisons with related research. Compared to existing studies that use EC as the objective function, results demonstrated that the optimization of the presented objective function reduced the number of iterations and, when compared with gradient descent optimization strategies, also reduced convergence time. Moreover, the algorithm effectively converges toward an optimal step frequency near the user's preferred frequency, positively influencing EC reduction. The good correlation between the estimated objective function and measured EC highlights its consistency and reliability. Thus, the proposed objective function could potentially optimize lower limb exoskeleton assistance and improve user performance and human-robot interaction without the need for challenging respiratory gas measurements. Impact Statement Wearable devices are important in assisting people, such as patients or older adults, during rehabilitation and everyday activities like walking. Some exoskeletons have been able to reduce the energy cost of walking. However, they require a cumbersome device to quantify it, making it impractical to use in real-life scenarios. Thus, we need to identify a way to assess energetic cost using wearable technologies. To address this, we introduced an EMG-based objective function that captures insights into energetic cost through muscle dynamics and motor coordination. Then, we minimized the proposed objective function online by optimizing walking step frequencies. We found that the EMG-based objective function highly correlates with energetic cost during walking. We also found that our algorithm effectively identifies an optimal step frequency that reduces participants' energetic cost. These findings will facilitate the customization of the assistance in wearable assistive devices and its application in real situations.
2023
Massardi, Stefano; Pinto-Fernandez, David; Babič, Jan; Dežman, Miha; Trošt, Andrej; Grosu, Victor; Lefeber, Dirk; Rodriguez, Carlos; Bessler, Jule; Schaake, Leendert; Prange-Lasonder, Gerdienke; Veneman, Jan F.; Torricelli, Diego
Relevance of hazards in exoskeleton applications: a survey-based enquiry Journal Article
In: Journal of NeuroEngineering and Rehabilitation, vol. 20, iss. 1, pp. 68, 2023, ISSN: 1743-0003.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Massardi2023,
title = {Relevance of hazards in exoskeleton applications: a survey-based enquiry},
author = {Stefano Massardi and David Pinto-Fernandez and Jan Babi\v{c} and Miha De\v{z}man and Andrej Tro\v{s}t and Victor Grosu and Dirk Lefeber and Carlos Rodriguez and Jule Bessler and Leendert Schaake and Gerdienke Prange-Lasonder and Jan F. Veneman and Diego Torricelli},
doi = {10.1186/s12984-023-01191-y},
issn = {1743-0003},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Journal of NeuroEngineering and Rehabilitation},
volume = {20},
issue = {1},
pages = {68},
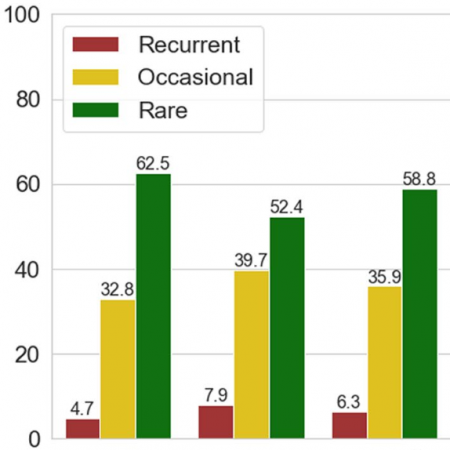
abstract = {Exoskeletons are becoming the reference technology for assistance and augmentation of human motor functions in a wide range of application domains. Unfortunately, the exponential growth of this sector has not been accompanied by a rigorous risk assessment (RA) process, which is necessary to identify the major aspects concerning the safety and impact of this new technology on humans. This situation may seriously hamper the market uptake of new products. This paper presents the results of a survey that was circulated to understand how hazards are considered by exoskeleton users, from research and industry perspectives. Our analysis aimed to identify the perceived occurrence and the impact of a sample of generic hazards, as well as to collect suggestions and general opinions from the respondents that can serve as a reference for more targeted RA. Our results identified a list of relevant hazards for exoskeletons. Among them, misalignments and unintended device motion were perceived as key aspects for exoskeletons’ safety. This survey aims to represent a first attempt in recording overall feedback from the community and contribute to future RAs and the identification of better mitigation strategies in the field.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
Exoskeletons are becoming the reference technology for assistance and augmentation of human motor functions in a wide range of application domains. Unfortunately, the exponential growth of this sector has not been accompanied by a rigorous risk assessment (RA) process, which is necessary to identify the major aspects concerning the safety and impact of this new technology on humans. This situation may seriously hamper the market uptake of new products. This paper presents the results of a survey that was circulated to understand how hazards are considered by exoskeleton users, from research and industry perspectives. Our analysis aimed to identify the perceived occurrence and the impact of a sample of generic hazards, as well as to collect suggestions and general opinions from the respondents that can serve as a reference for more targeted RA. Our results identified a list of relevant hazards for exoskeletons. Among them, misalignments and unintended device motion were perceived as key aspects for exoskeletons’ safety. This survey aims to represent a first attempt in recording overall feedback from the community and contribute to future RAs and the identification of better mitigation strategies in the field.
Diaz, Maria Alejandra; Bock, Sander De; Beckerle, Philipp; Babič, Jan; Verstraten, Tom; Pauw, Kevin De
An EMG-Based Objective Function for Human-in-the-Loop Optimization. Proceedings Article
In: 2023 International Conference on Rehabilitation Robotics (ICORR), pp. 1-6, IEEE, 2023, ISSN: 1945-7901.
Abstract | BibTeX | Tags: Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control | Links:
@inproceedings{Diaz2023,
title = {An EMG-Based Objective Function for Human-in-the-Loop Optimization.},
author = {Maria Alejandra Diaz and Sander De Bock and Philipp Beckerle and Jan Babi\v{c} and Tom Verstraten and Kevin De Pauw},
doi = {10.1109/ICORR58425.2023.10304819},
issn = {1945-7901},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 International Conference on Rehabilitation Robotics (ICORR)},
journal = {IEEE ... International Conference on Rehabilitation Robotics : [proceedings]},
volume = {2023},
pages = {1-6},
publisher = {IEEE},
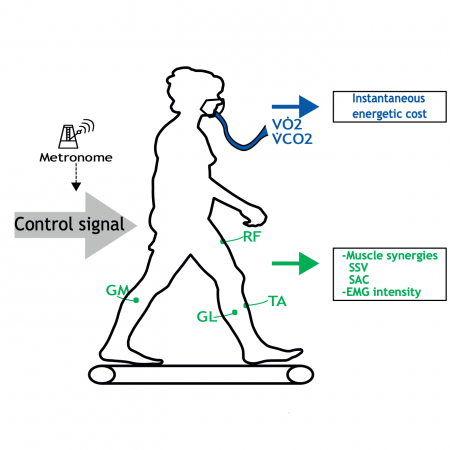
abstract = {Advancements in wearable robots aim to improve the users' motion, performance, and comfort by optimizing, mainly, energetic cost (EC). However, EC is a noisy measurement with a physiological delayed response that requires long evaluation periods and wearing an uncomfortable mask. This study aims to estimate and minimize an EMG-based objective function that describes the natural energetic expenditure of individuals walking. This objective is assessed by combining multiple electromyography (EMG) variables from the EMG intensity and muscle synergies. To evaluate this objective function simply and repeatedly, we prescribed step frequency (SF) via a metronome and optimized this frequency to minimize muscle activity demands. Further, a linear mixed-effects model was fitted for EC, with the EMG variables as fixed-effects and a random intercept that varies by participant. After the model was fitted to the data, a cubic polynomial was used to identify the optimal SF that reduces the overall EMG-based objective function. Our analysis outlines that the proposed objective function is comparable to the EC during walking, the primary objective function used in human-in-the-loop optimization. Thus, this EMG-based objective function could be potentially used to optimize wearable robots and improve human-robot interaction.},
keywords = {Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
Advancements in wearable robots aim to improve the users' motion, performance, and comfort by optimizing, mainly, energetic cost (EC). However, EC is a noisy measurement with a physiological delayed response that requires long evaluation periods and wearing an uncomfortable mask. This study aims to estimate and minimize an EMG-based objective function that describes the natural energetic expenditure of individuals walking. This objective is assessed by combining multiple electromyography (EMG) variables from the EMG intensity and muscle synergies. To evaluate this objective function simply and repeatedly, we prescribed step frequency (SF) via a metronome and optimized this frequency to minimize muscle activity demands. Further, a linear mixed-effects model was fitted for EC, with the EMG variables as fixed-effects and a random intercept that varies by participant. After the model was fitted to the data, a cubic polynomial was used to identify the optimal SF that reduces the overall EMG-based objective function. Our analysis outlines that the proposed objective function is comparable to the EC during walking, the primary objective function used in human-in-the-loop optimization. Thus, this EMG-based objective function could be potentially used to optimize wearable robots and improve human-robot interaction.
Díaz, María Alejandra; Voß, Matthias; Dillen, Arnau; Tassignon, Bruno; Flynn, Louis; Geeroms, Joost; Meeusen, Romain; Verstraten, Tom; Babič, Jan; Beckerle, Philipp; Pauw, Kevin De
Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human–Robot Interaction: A Systematic Review Journal Article
In: IEEE Transactions on Cybernetics, vol. 53, iss. 12, pp. 7483-7496, 2023, ISSN: 2168-2267.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Diaz2023b,
title = {Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human\textendashRobot Interaction: A Systematic Review},
author = {Mar\'{i}a Alejandra D\'{i}az and Matthias Vo\ss and Arnau Dillen and Bruno Tassignon and Louis Flynn and Joost Geeroms and Romain Meeusen and Tom Verstraten and Jan Babi\v{c} and Philipp Beckerle and Kevin De Pauw},
url = {https://ieeexplore.ieee.org/document/9994612/},
doi = {10.1109/TCYB.2022.3224895},
issn = {2168-2267},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {IEEE Transactions on Cybernetics},
volume = {53},
issue = {12},
pages = {7483-7496},
abstract = {This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human\textendashrobot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human\textendashmachine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human–robot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human–machine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.
2022
Latella, Claudia; Tirupachuri, Yeshasvi; Tagliapietra, Luca; Rapetti, Lorenzo; Schirrmeister, Benjamin; Bornmann, Jonas; Gorjan, Dasa; Čamernik, Jernej; Maurice, Pauline; Fritzsche, Lars; Gonzalez-Vargas, Jose; Ivaldi, Serena; Babič, Jan; Nori, Francesco; Pucci, Daniele
Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 52, no. 5, pp. 1060–1068, 2022, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction | Links:
@article{Latella2022,
title = {Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton},
author = {Claudia Latella and Yeshasvi Tirupachuri and Luca Tagliapietra and Lorenzo Rapetti and Benjamin Schirrmeister and Jonas Bornmann and Dasa Gorjan and Jernej \v{C}amernik and Pauline Maurice and Lars Fritzsche and Jose Gonzalez-Vargas and Serena Ivaldi and Jan Babi\v{c} and Francesco Nori and Daniele Pucci},
url = {https://ieeexplore.ieee.org/document/9647004/},
doi = {10.1109/THMS.2021.3128892},
issn = {2168-2291},
year = {2022},
date = {2022-10-01},
urldate = {2022-10-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {52},
number = {5},
pages = {1060--1068},
publisher = {IEEE},
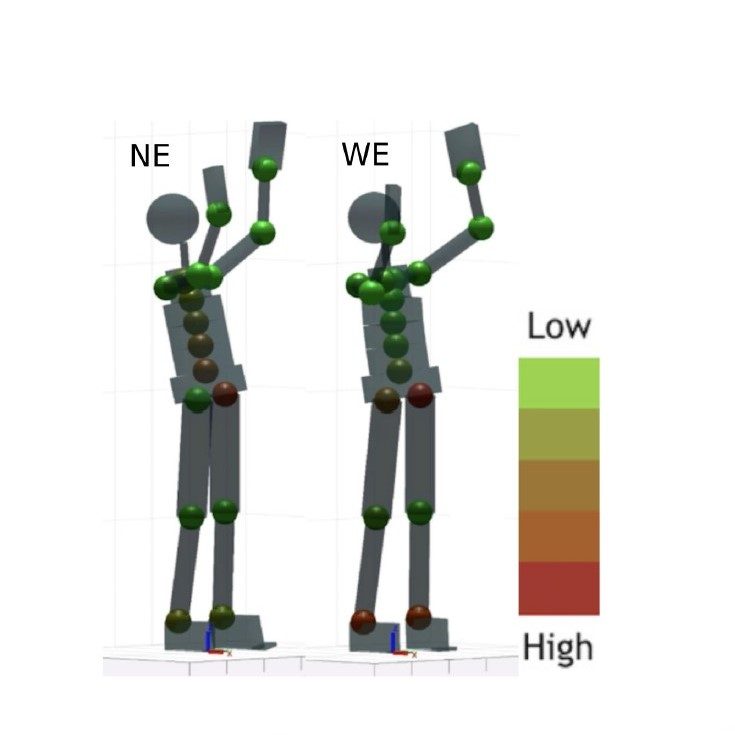
abstract = {Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.
Fritzsche, Lars; Gärtner, Christian; Spitzhirn, Michael; Galibarov, Pavel E; Damsgaard, Michael; Maurice, Pauline; Babič, Jan
Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results Proceedings Article
In: Black, Nancy L; Neumann, W Patrick; Noy, Ian (Ed.): Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), pp. 353–357, Springer International Publishing, Cham, 2022, ISBN: 978-3-030-74614-8.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction
@inproceedings{10.1007/978-3-030-74614-8_43,
title = {Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results},
author = {Lars Fritzsche and Christian G\"{a}rtner and Michael Spitzhirn and Pavel E Galibarov and Michael Damsgaard and Pauline Maurice and Jan Babi\v{c}},
editor = {Nancy L Black and W Patrick Neumann and Ian Noy},
isbn = {978-3-030-74614-8},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021)},
pages = {353--357},
publisher = {Springer International Publishing},
address = {Cham},
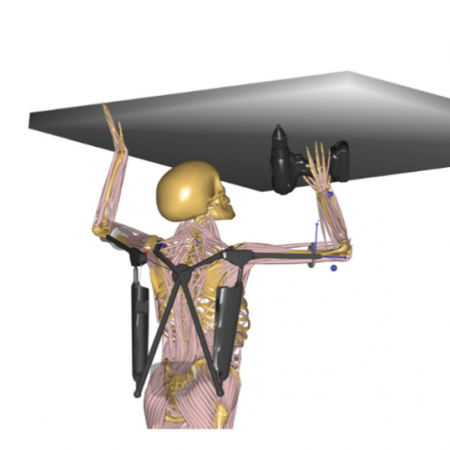
abstract = {Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.
2021
Babič, Jan; Laffranchi, Matteo; Tessari, Federico; Verstraten, Tom; Novak, Domen; Šarabon, Nejc; Ugurlu, Barkan; Peternel, Luka; Torricelli, Diego; Veneman, Jan F.
Challenges and solutions for application and wider adoption of wearable robots Journal Article
In: Wearable Technologies, vol. 2, pp. e14, 2021, ISSN: 2631-7176.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Babic2021,
title = {Challenges and solutions for application and wider adoption of wearable robots},
author = {Jan Babi\v{c} and Matteo Laffranchi and Federico Tessari and Tom Verstraten and Domen Novak and Nejc \v{S}arabon and Barkan Ugurlu and Luka Peternel and Diego Torricelli and Jan F. Veneman},
url = {https://www.cambridge.org/core/product/identifier/S263171762100013X/type/journal_article},
doi = {10.1017/wtc.2021.13},
issn = {2631-7176},
year = {2021},
date = {2021-11-01},
urldate = {2021-11-01},
journal = {Wearable Technologies},
volume = {2},
pages = {e14},
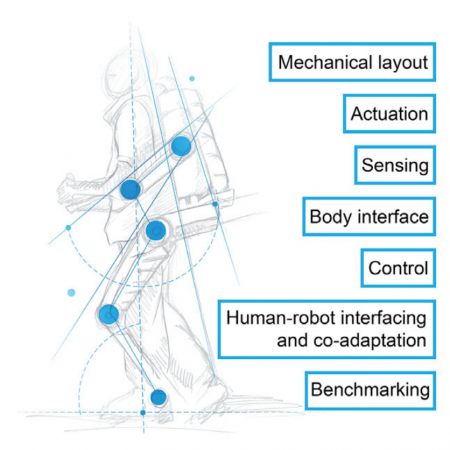
abstract = {The science and technology of wearable robots are steadily advancing, and the use of such robots in our everyday life appears to be within reach. Nevertheless, widespread adoption of wearable robots should not be taken for granted, especially since many recent attempts to bring them to real-life applications resulted in mixed outcomes. The aim of this article is to address the current challenges that are limiting the application and wider adoption of wearable robots that are typically worn over the human body. We categorized the challenges into mechanical layout, actuation, sensing, body interface, control, human\textendashrobot interfacing and coadaptation, and benchmarking. For each category, we discuss specific challenges and the rationale for why solving them is important, followed by an overview of relevant recent works. We conclude with an opinion that summarizes possible solutions that could contribute to the wider adoption of wearable robots.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
The science and technology of wearable robots are steadily advancing, and the use of such robots in our everyday life appears to be within reach. Nevertheless, widespread adoption of wearable robots should not be taken for granted, especially since many recent attempts to bring them to real-life applications resulted in mixed outcomes. The aim of this article is to address the current challenges that are limiting the application and wider adoption of wearable robots that are typically worn over the human body. We categorized the challenges into mechanical layout, actuation, sensing, body interface, control, human–robot interfacing and coadaptation, and benchmarking. For each category, we discuss specific challenges and the rationale for why solving them is important, followed by an overview of relevant recent works. We conclude with an opinion that summarizes possible solutions that could contribute to the wider adoption of wearable robots.

Kunavar, Tjaša; Jamšek, Marko; Barbiero, Marie; Blohm, Gunnar; Nozaki, Daichi; Papaxanthis, Charalambos; White, Olivier; Babič, Jan
Effects of Local Gravity Compensation on Motor Control During Altered Environmental Gravity Journal Article
In: Frontiers in Neural Circuits, vol. 15, 2021, ISSN: 1662-5110.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning | Links:
@article{Kunavar2021,
title = {Effects of Local Gravity Compensation on Motor Control During Altered Environmental Gravity},
author = {Tja\v{s}a Kunavar and Marko Jam\v{s}ek and Marie Barbiero and Gunnar Blohm and Daichi Nozaki and Charalambos Papaxanthis and Olivier White and Jan Babi\v{c}},
url = {https://www.frontiersin.org/articles/10.3389/fncir.2021.750267/full},
doi = {10.3389/fncir.2021.750267},
issn = {1662-5110},
year = {2021},
date = {2021-10-01},
urldate = {2021-10-01},
journal = {Frontiers in Neural Circuits},
volume = {15},
abstract = {Our sensorimotor control is well adapted to normogravity environment encountered on Earth and any change in gravity significantly disturbs our movement. In order to produce appropriate motor commands for aimed arm movements such as pointing or reaching, environmental changes have to be taken into account. This adaptation is crucial when performing successful movements during microgravity and hypergravity conditions. To mitigate the effects of changing gravitational levels, such as the changed movement duration and decreased accuracy, we explored the possible beneficial effects of gravity compensation on movement. Local gravity compensation was achieved using a motorized robotic device capable of applying precise forces to the subject's wrist that generated a normogravity equivalent torque at the shoulder joint during periods of microgravity and hypergravity. The efficiency of the local gravity compensation was assessed with an experiment in which participants performed a series of pointing movements toward the target on a screen during a parabolic flight. We compared movement duration, accuracy, movement trajectory, and muscle activations of movements during periods of microgravity and hypergravity with conditions when local gravity compensation was provided. The use of local gravity compensation at the arm mitigated the changes in movement duration, accuracy, and muscle activity. Our results suggest that the use of such an assistive device helps with movements during unfamiliar environmental gravity.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Our sensorimotor control is well adapted to normogravity environment encountered on Earth and any change in gravity significantly disturbs our movement. In order to produce appropriate motor commands for aimed arm movements such as pointing or reaching, environmental changes have to be taken into account. This adaptation is crucial when performing successful movements during microgravity and hypergravity conditions. To mitigate the effects of changing gravitational levels, such as the changed movement duration and decreased accuracy, we explored the possible beneficial effects of gravity compensation on movement. Local gravity compensation was achieved using a motorized robotic device capable of applying precise forces to the subject's wrist that generated a normogravity equivalent torque at the shoulder joint during periods of microgravity and hypergravity. The efficiency of the local gravity compensation was assessed with an experiment in which participants performed a series of pointing movements toward the target on a screen during a parabolic flight. We compared movement duration, accuracy, movement trajectory, and muscle activations of movements during periods of microgravity and hypergravity with conditions when local gravity compensation was provided. The use of local gravity compensation at the arm mitigated the changes in movement duration, accuracy, and muscle activity. Our results suggest that the use of such an assistive device helps with movements during unfamiliar environmental gravity.
Jamšek, Marko; Kunavar, Tjaša; Bobek, Urban; Rueckert, Elmar; Babič, Jan
Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4417–4424, 2021, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction | Links:
@article{Jamsek2021,
title = {Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Urban Bobek and Elmar Rueckert and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/9387088/},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-07-01},
urldate = {2021-07-01},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {3},
pages = {4417--4424},
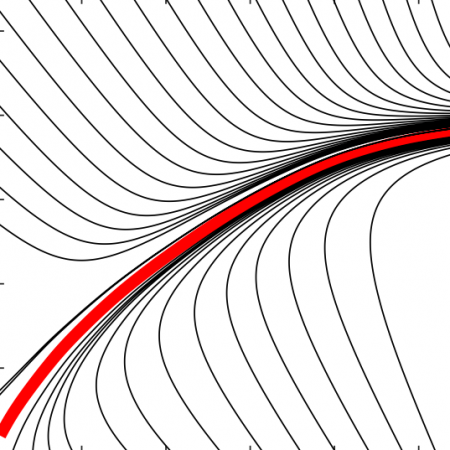
abstract = {There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.},
keywords = {Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.
Kim, Wansoo; Peternel, Luka; Lorenzini, Marta; Babič, Jan; Ajoudani, Arash
A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools Journal Article
In: Robotics and Computer-Integrated Manufacturing, vol. 68, pp. 102084, 2021, ISSN: 07365845.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Kim2021,
title = {A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools},
author = {Wansoo Kim and Luka Peternel and Marta Lorenzini and Jan Babi\v{c} and Arash Ajoudani},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0736584520302945},
doi = {10.1016/j.rcim.2020.102084},
issn = {07365845},
year = {2021},
date = {2021-04-01},
journal = {Robotics and Computer-Integrated Manufacturing},
volume = {68},
pages = {102084},
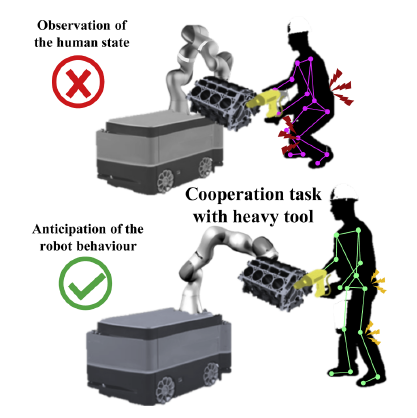
abstract = {In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.},
keywords = {Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.

Fonda, Borut; Babič, Jan; Šarabon, Nejc
The medial‐lateral pedal force component correlates with q‐angle during steady‐state cycling at different workloads and cadences Journal Article
In: Applied Sciences (Switzerland), vol. 11, no. 3, pp. 1–8, 2021, ISSN: 20763417.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Sport | Links:
@article{Fonda2021,
title = {The medial‐lateral pedal force component correlates with q‐angle during steady‐state cycling at different workloads and cadences},
author = {Borut Fonda and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/app11031004},
issn = {20763417},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Applied Sciences (Switzerland)},
volume = {11},
number = {3},
pages = {1--8},
abstract = {Leg movement during cycling is constrained to the pedal/crank path and predominantly occurs in a sagittal plane. Medial‐lateral force (FML) applied to the pedals is considered as a waste and does not contribute to the pedaling. The aim of this study was to examine the changes in FML across different cadences and workloads, and to examine the correlation with lateral knee movement (Q‐angle). Twenty‐two cyclists completed six trials at three workloads (2, 2.5 and 3 W/kg) and three cadences (75, 85, 95 rpm). Forces were recorded from the force pedal mounted to the left side. Absolute and normalized (to the peak total force) FML were compared across conditions and crosscorrelation with Q‐angle was calculated. Absolute FML was significantly different across cadences and workloads (p \< 0.05) with higher absolute FML at higher cadence. There was no significant difference in normalized FML across the three cadences. There was a significant decrease in normalized FML ($sim$10 N) at higher workloads. Statistically significant correlations were found between the FML and Q‐angle (R = 0.70\textendash0.77). The results demonstrate the link between the FML and Q‐ angle in healthy pain‐free cyclists during stationary cycling. It has also been observed that smaller normalized magnitude of the FML is present when the force effectiveness is increased.},
keywords = {Ergonomy, Human Performance Augmentation, Sport},
pubstate = {published},
tppubtype = {article}
}
Leg movement during cycling is constrained to the pedal/crank path and predominantly occurs in a sagittal plane. Medial‐lateral force (FML) applied to the pedals is considered as a waste and does not contribute to the pedaling. The aim of this study was to examine the changes in FML across different cadences and workloads, and to examine the correlation with lateral knee movement (Q‐angle). Twenty‐two cyclists completed six trials at three workloads (2, 2.5 and 3 W/kg) and three cadences (75, 85, 95 rpm). Forces were recorded from the force pedal mounted to the left side. Absolute and normalized (to the peak total force) FML were compared across conditions and crosscorrelation with Q‐angle was calculated. Absolute FML was significantly different across cadences and workloads (p < 0.05) with higher absolute FML at higher cadence. There was no significant difference in normalized FML across the three cadences. There was a significant decrease in normalized FML ($sim$10 N) at higher workloads. Statistically significant correlations were found between the FML and Q‐angle (R = 0.70–0.77). The results demonstrate the link between the FML and Q‐ angle in healthy pain‐free cyclists during stationary cycling. It has also been observed that smaller normalized magnitude of the FML is present when the force effectiveness is increased.

Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
In: International Journal of Environmental Research and Public Health, vol. 18, no. 1, pp. 1–9, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Kozinc2021a,
title = {Comparison of subjective responses of low back pain patients and asymptomatic controls to use of spinal exoskeleton during simple load lifting tasks: A pilot study},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/ijerph18010161},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {1},
pages = {1--9},
abstract = {Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0\textendash10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0–10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.

Fritzsche, Lars; Galibarov, Pavel E.; Gartner, Christian; Bornmann, Jonas; Damsgaard, Michael; Wall, Rudolf; Schirrmeister, Benjamin; Gonzalez-Vargas, Jose; Pucci, Daniele; Maurice, Pauline; Ivaldi, Serena; Babič, Jan
Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System Journal Article
In: Wearable Technologies, vol. 2, 2021.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@article{Fritzsche2021,
title = {Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System},
author = {Lars Fritzsche and Pavel E. Galibarov and Christian Gartner and Jonas Bornmann and Michael Damsgaard and Rudolf Wall and Benjamin Schirrmeister and Jose Gonzalez-Vargas and Daniele Pucci and Pauline Maurice and Serena Ivaldi and Jan Babi\v{c}},
doi = {10.1017/wtc.2021.5},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Wearable Technologies},
volume = {2},
abstract = {IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.

Jamšek, Marko; Kunavar, Tjaša; Blohm, Gunnar; Nozaki, Daichi; Papaxanthis, Charalambos; White, Olivier; Babič, Jan
Effects of Simulated Microgravity and Hypergravity Conditions on Arm Movements in Normogravity Journal Article
In: Frontiers in Neural Circuits, vol. 15, pp. 150, 2021, ISSN: 1662-5110.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning | Links:
@article{10.3389/fncir.2021.750176,
title = {Effects of Simulated Microgravity and Hypergravity Conditions on Arm Movements in Normogravity},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Gunnar Blohm and Daichi Nozaki and Charalambos Papaxanthis and Olivier White and Jan Babi\v{c}},
url = {https://www.frontiersin.org/article/10.3389/fncir.2021.750176},
doi = {10.3389/fncir.2021.750176},
issn = {1662-5110},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Frontiers in Neural Circuits},
volume = {15},
pages = {150},
abstract = {The human sensorimotor control has evolved in the Earth's environment where all movement is influenced by the gravitational force. Changes in this environmental force can severely impact the performance of arm movements which can be detrimental in completing certain tasks such as piloting or controlling complex vehicles. For this reason, subjects that are required to perform such tasks undergo extensive training procedures in order to minimize the chances of failure. We investigated whether local gravity simulation of altered gravitational conditions on the arm would lead to changes in kinematic parameters comparable to the full-body experience of microgravity and hypergravity onboard a parabolic flight. To see if this would be a feasible approach for on-ground training of arm reaching movements in altered gravity conditions we developed a robotic device that was able to apply forces at the wrist in order to simulate micro- or hypergravity conditions for the arm while subjects performed pointing movements on a touch screen. We analyzed and compared the results of several kinematic parameters along with muscle activity using this system with data of the same subjects being fully exposed to microgravity and hypergravity conditions on a parabolic flight. Both in our simulation and in-flight, we observed a significant increase in movement durations in microgravity conditions and increased velocities in hypergravity for upward movements. Additionally, we noted a reduced accuracy of pointing both in-flight and in our simulation. These promising results suggest, that locally simulated altered gravity can elicit similar changes in some movement characteristics for arm reaching movements. This could potentially be exploited as a means of developing devices such as exoskeletons to aid in training individuals prior to undertaking tasks in changed gravitational conditions.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The human sensorimotor control has evolved in the Earth's environment where all movement is influenced by the gravitational force. Changes in this environmental force can severely impact the performance of arm movements which can be detrimental in completing certain tasks such as piloting or controlling complex vehicles. For this reason, subjects that are required to perform such tasks undergo extensive training procedures in order to minimize the chances of failure. We investigated whether local gravity simulation of altered gravitational conditions on the arm would lead to changes in kinematic parameters comparable to the full-body experience of microgravity and hypergravity onboard a parabolic flight. To see if this would be a feasible approach for on-ground training of arm reaching movements in altered gravity conditions we developed a robotic device that was able to apply forces at the wrist in order to simulate micro- or hypergravity conditions for the arm while subjects performed pointing movements on a touch screen. We analyzed and compared the results of several kinematic parameters along with muscle activity using this system with data of the same subjects being fully exposed to microgravity and hypergravity conditions on a parabolic flight. Both in our simulation and in-flight, we observed a significant increase in movement durations in microgravity conditions and increased velocities in hypergravity for upward movements. Additionally, we noted a reduced accuracy of pointing both in-flight and in our simulation. These promising results suggest, that locally simulated altered gravity can elicit similar changes in some movement characteristics for arm reaching movements. This could potentially be exploited as a means of developing devices such as exoskeletons to aid in training individuals prior to undertaking tasks in changed gravitational conditions.
2020
Koopman, Axel S; Naf, Matthias; Baltrusch, Saskia J; Kingma, Idsart; Rodriguez-Guerrero, Carlos; Babič, Jan; de Looze, Michiel P; van Dieen, Jaap H
Biomechanical evaluation of a new passive back support exoskeleton Journal Article
In: Journal of Biomechanics, vol. 105, pp. 109795, 2020, ISSN: 00219290.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Koopman2020,
title = {Biomechanical evaluation of a new passive back support exoskeleton},
author = {Axel S Koopman and Matthias Naf and Saskia J Baltrusch and Idsart Kingma and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Michiel P de Looze and Jaap H van Dieen},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020302153},
doi = {10.1016/j.jbiomech.2020.109795},
issn = {00219290},
year = {2020},
date = {2020-05-01},
urldate = {2020-05-01},
journal = {Journal of Biomechanics},
volume = {105},
pages = {109795},
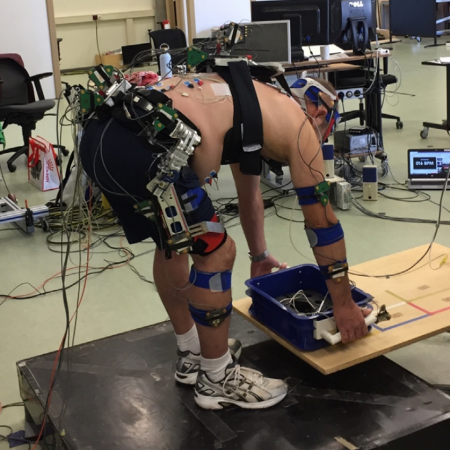
abstract = {The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13\textendash21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13–21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.
2019
Petrič, Tadej; Peternel, Luka; Morimoto, Jun; Babič, Jan
Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability Journal Article
In: Frontiers in Neurorobotics, vol. 13, pp. 30, 2019, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Performance Augmentation, Optimal Control | Links:
@article{Petric2019,
title = {Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability},
author = {Tadej Petri\v{c} and Luka Peternel and Jun Morimoto and Jan Babi\v{c}},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2019.00030/full https://www.frontiersin.org/articles/10.3389/fnbot.2019.00030/full?\&utm_source=Email_to_authors_\&utm_medium=Email\&utm_content=T1_11.5e1_author\&utm_campaign=Email_publication\&field=\&journalName=Frontiers_in_Neurorobotics\&id=451266},
doi = {10.3389/fnbot.2019.00030},
issn = {1662-5218},
year = {2019},
date = {2019-05-01},
journal = {Frontiers in Neurorobotics},
volume = {13},
pages = {30},
publisher = {Frontiers},
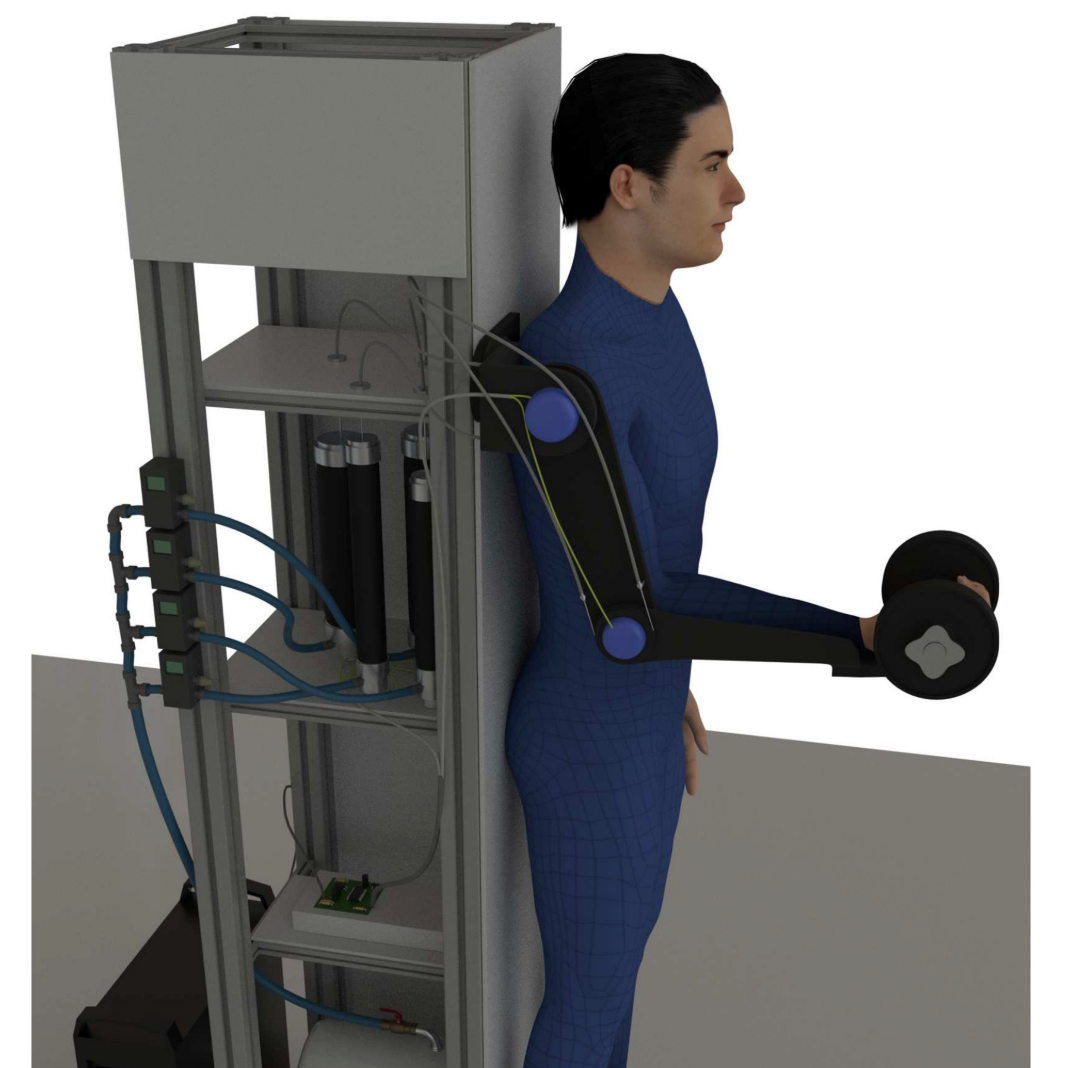
abstract = {This paper introduces a novel control framework for an arm exoskeleton that takes into account force of the human arm. In contrast to the conventional exoskeleton controllers where the assistance is provided without considering the human arm biomechanical force manipulability properties, we propose a control approach based on the arm muscular manipulability. The proposed control framework essentially reshapes the anisotropic force manipulability into the endpoint force manipulability that is invariant with respect to the direction in the entire workspace of the arm. This allows users of the exoskeleton to perform tasks effectively in the whole range of the workspace, even in areas that are normally unsuitable due to the low force manipulability of the human arm. We evaluated the proposed control framework with real robot experiments where subjects wearing an arm exoskeleton were asked to move a weight between several locations. The results show that the proposed control framework does not affect the normal movement behavior of the users while effectively reduces user effort in the area of low manipulability.Particularly, the proposed approach augments the human arm force manipulability to execute tasks equally well in the entire workspace of the arm.},
keywords = {Compliance and Impedance Control, Human Performance Augmentation, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
This paper introduces a novel control framework for an arm exoskeleton that takes into account force of the human arm. In contrast to the conventional exoskeleton controllers where the assistance is provided without considering the human arm biomechanical force manipulability properties, we propose a control approach based on the arm muscular manipulability. The proposed control framework essentially reshapes the anisotropic force manipulability into the endpoint force manipulability that is invariant with respect to the direction in the entire workspace of the arm. This allows users of the exoskeleton to perform tasks effectively in the whole range of the workspace, even in areas that are normally unsuitable due to the low force manipulability of the human arm. We evaluated the proposed control framework with real robot experiments where subjects wearing an arm exoskeleton were asked to move a weight between several locations. The results show that the proposed control framework does not affect the normal movement behavior of the users while effectively reduces user effort in the area of low manipulability.Particularly, the proposed approach augments the human arm force manipulability to execute tasks equally well in the entire workspace of the arm.
2018

Petrič, Tadej; Cevzar, Mišel; Babič, Jan
Shared Control for Human-Robot Cooperative Manipulation Tasks Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 787–796, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@incollection{Petric2018,
title = {Shared Control for Human-Robot Cooperative Manipulation Tasks},
author = {Tadej Petri\v{c} and Mi\v{s}el Cevzar and Jan Babi\v{c}},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_83},
doi = {10.1007/978-3-319-61276-8_83},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {787--796},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.},
keywords = {Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.
Jamšek, Marko; Babič, Jan
Design and preliminary testing of a pneumatic exoskeleton for walking assistance Proceedings Article
In: 27th International Electrotechnical and Computer Science Conference ERK 2018, pp. 159–162, 2018.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inproceedings{Jamsek2018,
title = {Design and preliminary testing of a pneumatic exoskeleton for walking assistance},
author = {Marko Jam\v{s}ek and Jan Babi\v{c}},
url = {https://erk.fe.uni-lj.si/2018/program.php},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
booktitle = {27th International Electrotechnical and Computer Science Conference ERK 2018},
pages = {159--162},
abstract = {Tripping is one of the major causes of falls in elderly people. Injuries that originate from falls usually have se- vere consequences on their quality of life. The best so- lution for this problem is prevention of such traumatic events which proves to be a challenge in the current state of elderly care. This is why we are in an urgent need of developing new solutions that could help in the preven- tion of falls and fall related injuries in this ever increas- ing part of our entire population. One possible preven- tive solution could be the use of assistive devices such as exoskeletons. In this work we present a design of a pneumatic exoskeleton for walking assistance primarily designed as a platform to study active control solutions for preventing falls caused by tripping. We also present a preliminary evaluation of the exoskeleton capabilities on affecting the gait characteristics of a subject during walking.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inproceedings}
}
Tripping is one of the major causes of falls in elderly people. Injuries that originate from falls usually have se- vere consequences on their quality of life. The best so- lution for this problem is prevention of such traumatic events which proves to be a challenge in the current state of elderly care. This is why we are in an urgent need of developing new solutions that could help in the preven- tion of falls and fall related injuries in this ever increas- ing part of our entire population. One possible preven- tive solution could be the use of assistive devices such as exoskeletons. In this work we present a design of a pneumatic exoskeleton for walking assistance primarily designed as a platform to study active control solutions for preventing falls caused by tripping. We also present a preliminary evaluation of the exoskeleton capabilities on affecting the gait characteristics of a subject during walking.
2017
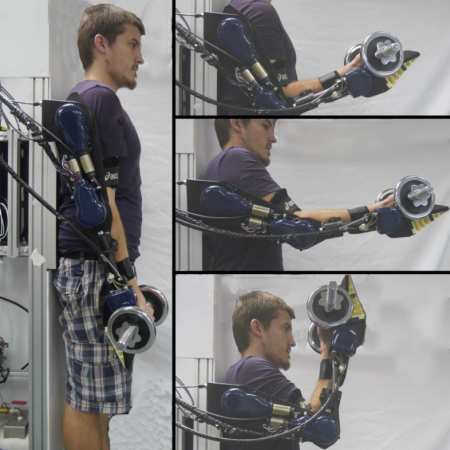
Goljat, Rok; Babič, Jan; Petrič, Tadej; Peternel, Luka; Morimoto, Jun
Power-augmentation control approach for arm exoskeleton based on human muscular manipulability Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 5929–5934, IEEE, 2017, ISSN: 10504729.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Goljat2017,
title = {Power-augmentation control approach for arm exoskeleton based on human muscular manipulability},
author = {Rok Goljat and Jan Babi\v{c} and Tadej Petri\v{c} and Luka Peternel and Jun Morimoto},
url = {https://ieeexplore.ieee.org/document/7989698/},
doi = {10.1109/ICRA.2017.7989698},
issn = {10504729},
year = {2017},
date = {2017-05-01},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {5929--5934},
publisher = {IEEE},
abstract = {The paper presents a novel control method for the arm exoskeletons that takes into account the muscular force manipulability of the human arm. In contrast to classical controllers that provide assistance without considering the biomechanical properties of the human arm, we propose a control method that takes into account the configuration of the arm and the direction of the motion to effectively compensate the anisotropic property of the muscular manipulability of the human arm. Consequently, the proposed control method effectively maintains a spherical endpoint manipulability in the entire workspace of the arm. As a result, the proposed method allows the human using the exoskeleton to efficiently perform tasks in arm configurations that are normally unsuitable due to the low manipulability. We evaluated the proposed approach by a preliminary experimental study where a subject wearing a 2 DOF arm-exoskeleton had to move a 4 kg weight between several locations. The results of our study demonstrate that the proposed approach effectively augments the ability of human motor control to perform tasks equally well in the whole arm workspace that include configurations with low intrinsic manipulability.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper presents a novel control method for the arm exoskeletons that takes into account the muscular force manipulability of the human arm. In contrast to classical controllers that provide assistance without considering the biomechanical properties of the human arm, we propose a control method that takes into account the configuration of the arm and the direction of the motion to effectively compensate the anisotropic property of the muscular manipulability of the human arm. Consequently, the proposed control method effectively maintains a spherical endpoint manipulability in the entire workspace of the arm. As a result, the proposed method allows the human using the exoskeleton to efficiently perform tasks in arm configurations that are normally unsuitable due to the low manipulability. We evaluated the proposed approach by a preliminary experimental study where a subject wearing a 2 DOF arm-exoskeleton had to move a 4 kg weight between several locations. The results of our study demonstrate that the proposed approach effectively augments the ability of human motor control to perform tasks equally well in the whole arm workspace that include configurations with low intrinsic manipulability.

Rijcke, Laura De; Näf, Matthias; Rodriguez-Guerrero, Carlos; Graimann, Bernhard; Houdijk, Han; van Dieën, Jaap; Mombaur, Katja; Russold, Michael; Sarabon, Nejc; Babič, Jan; Lefeber, Dirk
SPEXOR: Towards a Passive Spinal Exoskeleton Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, vol. 16, pp. 325–329, Springer International Publishing, 2017, ISBN: 978-3-319-46531-9.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{DeRijcke2017,
title = {SPEXOR: Towards a Passive Spinal Exoskeleton},
author = {Laura {De Rijcke} and Matthias N\"{a}f and Carlos Rodriguez-Guerrero and Bernhard Graimann and Han Houdijk and Jaap van Die\"{e}n and Katja Mombaur and Michael Russold and Nejc Sarabon and Jan Babi\v{c} and Dirk Lefeber},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_53},
doi = {10.1007/978-3-319-46532-6_53},
isbn = {978-3-319-46531-9},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
volume = {16},
pages = {325--329},
publisher = {Springer International Publishing},
abstract = {Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In this part of the SPEXOR project we will fill this gap and design a novel, passive spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In this part of the SPEXOR project we will fill this gap and design a novel, passive spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.
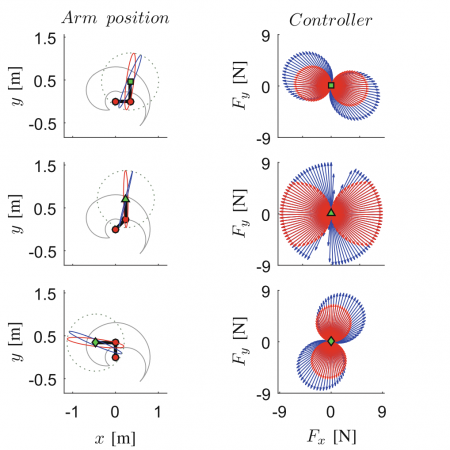
Goljat, Rok; Petrič, Tadej; Babič, Jan
Upper Limb Exoskeleton Control for Isotropic Sensitivity of Human Arm Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, vol. 16, pp. 433–437, Springer International Publishing, 2017, ISBN: 978-3-319-46531-9.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@incollection{Goljat2017a,
title = {Upper Limb Exoskeleton Control for Isotropic Sensitivity of Human Arm},
author = {Rok Goljat and Tadej Petri\v{c} and Jan Babi\v{c}},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_71},
doi = {10.1007/978-3-319-46532-6_71},
isbn = {978-3-319-46531-9},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
volume = {16},
pages = {433--437},
publisher = {Springer International Publishing},
abstract = {Most of today's assistive devices are controlled to provide uniform assis- tance irrespectively from the configuration of the human arm and the direction of the movement. We propose an innovative control method for arm exoskeletons that takes into account both of these parameters and compensates the anisotropic property of the force manipulability measure, intrinsic to the biomechanics of the human arm. To test our controller we designed a set of reaching tasks where the subjects had to carry two different loads to targets at five different locations and of two different sizes. Reaching times and trajectories were analysed for the evaluation of the controller. Through the analysis of the average reaching times we found that our method suc- cessfully enhances the motion while the analysis of the average maximal deviation from the ideal trajectories showed that our method does not induce any additional dynamic behaviour to the user.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {incollection}
}
Most of today's assistive devices are controlled to provide uniform assis- tance irrespectively from the configuration of the human arm and the direction of the movement. We propose an innovative control method for arm exoskeletons that takes into account both of these parameters and compensates the anisotropic property of the force manipulability measure, intrinsic to the biomechanics of the human arm. To test our controller we designed a set of reaching tasks where the subjects had to carry two different loads to targets at five different locations and of two different sizes. Reaching times and trajectories were analysed for the evaluation of the controller. Through the analysis of the average reaching times we found that our method suc- cessfully enhances the motion while the analysis of the average maximal deviation from the ideal trajectories showed that our method does not induce any additional dynamic behaviour to the user.
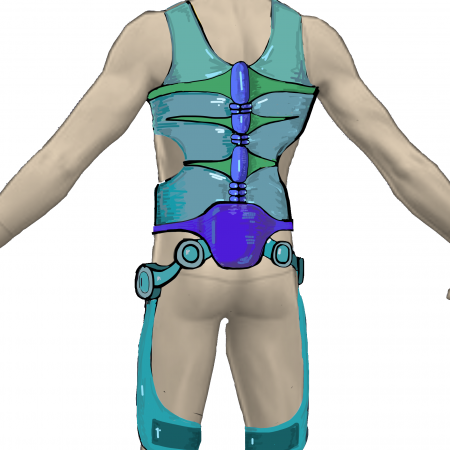
Babič, Jan; Mombaur, Katja; Lefeber, Dirk; van Dieën, Jaap; Graimann, Bernhard; Russold, Michael; Šarabon, Nejc; Houdijk, Han
SPEXOR: Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, pp. 311–315, Springer International Publishing, 2017.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{Babic2017,
title = {SPEXOR: Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration},
author = {Jan Babi\v{c} and Katja Mombaur and Dirk Lefeber and Jaap van Die\"{e}n and Bernhard Graimann and Michael Russold and Nejc \v{S}arabon and Han Houdijk},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_51},
doi = {10.1007/978-3-319-46532-6_51},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
pages = {311--315},
publisher = {Springer International Publishing},
abstract = {Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In the SPEXOR project we will fill this gap and design a novel spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In the SPEXOR project we will fill this gap and design a novel spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.
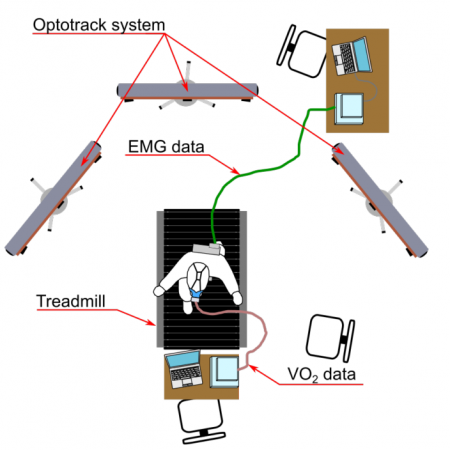
Dežman, Miha; Debevec, Tadej; Babič, Jan; Gams, Andrej
Effects of Passive Ankle Exoskeleton on Human Energy Expenditure: Pilot Evaluation Book Section
In: Advances in Intelligent Systems and Computing, vol. 540, pp. 491–498, Springer, 2017, ISSN: 21945357.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{Dezman2017,
title = {Effects of Passive Ankle Exoskeleton on Human Energy Expenditure: Pilot Evaluation},
author = {Miha De\v{z}man and Tadej Debevec and Jan Babi\v{c} and Andrej Gams},
url = {http://link.springer.com/10.1007/978-3-319-49058-8_53},
doi = {10.1007/978-3-319-49058-8_53},
issn = {21945357},
year = {2017},
date = {2017-01-01},
booktitle = {Advances in Intelligent Systems and Computing},
volume = {540},
pages = {491--498},
publisher = {Springer},
abstract = {Exoskeletons can be utilized for rehabilitation purposes as well as for assistance and augmentation of motion of patients with disabilities, workers, elderly and even healthy people. Compared to powered solutions, unpowered passive exoskeletons have been shown to have significantly higher chances of end user acceptance, because of simpler design, no complex electronics and potentially lower cost. In this paper we present the results of a flat walking test using an unpowered passive ankle exoskeleton. Important exoskeleton aspects such as ergonomics, comfort, and robust design are outlined and areas for improvement are highlighted. The paper also presents the results of the evaluation of the exoskeleton device in a pilot study, where its physiological effects are assessed for four participants via measurements of oxygen consumption and EMG muscle activity during five 10-min walking sessions under different conditions. Results show that significant metabolic cost reduction can only be achieved with a proper mechanism spring selection.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Exoskeletons can be utilized for rehabilitation purposes as well as for assistance and augmentation of motion of patients with disabilities, workers, elderly and even healthy people. Compared to powered solutions, unpowered passive exoskeletons have been shown to have significantly higher chances of end user acceptance, because of simpler design, no complex electronics and potentially lower cost. In this paper we present the results of a flat walking test using an unpowered passive ankle exoskeleton. Important exoskeleton aspects such as ergonomics, comfort, and robust design are outlined and areas for improvement are highlighted. The paper also presents the results of the evaluation of the exoskeleton device in a pilot study, where its physiological effects are assessed for four participants via measurements of oxygen consumption and EMG muscle activity during five 10-min walking sessions under different conditions. Results show that significant metabolic cost reduction can only be achieved with a proper mechanism spring selection.
2016
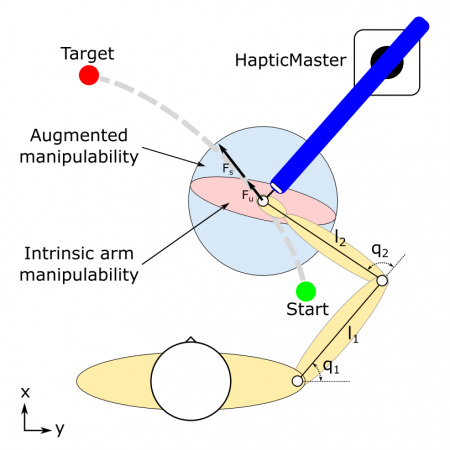
Petrič, Tadej; Goljat, Rok; Babič, Jan
Augmentation of human arm motor control by isotropic force manipulability Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 696–701, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Petric2016a,
title = {Augmentation of human arm motor control by isotropic force manipulability},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759128/},
doi = {10.1109/IROS.2016.7759128},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-10-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {696--701},
publisher = {IEEE},
address = {Daejeon},
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.
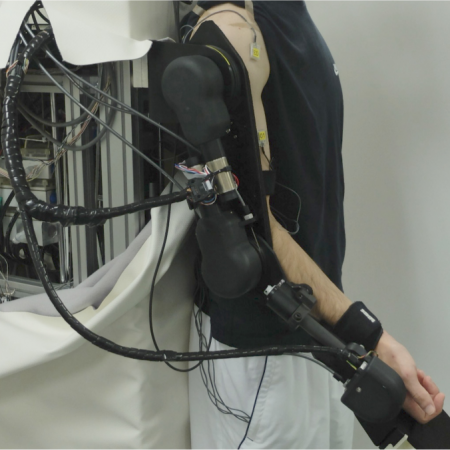
Peternel, Luka; Noda, Tomoyuki; Petrič, Tadej; Ude, Aleš; Morimoto, Jun; Babič, Jan
Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation Journal Article
In: PLOS ONE, vol. 11, no. 2, pp. e0148942, 2016, ISSN: 1932-6203.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Muscle Mechanics | Links:
@article{Peternel2016b,
title = {Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation},
author = {Luka Peternel and Tomoyuki Noda and Tadej Petri\v{c} and Ale\v{s} Ude and Jun Morimoto and Jan Babi\v{c}},
editor = {Dingguo Zhang},
url = {http://dx.plos.org/10.1371/journal.pone.0148942},
doi = {10.1371/journal.pone.0148942},
issn = {1932-6203},
year = {2016},
date = {2016-02-01},
journal = {PLOS ONE},
volume = {11},
number = {2},
pages = {e0148942},
abstract = {In this paper we propose an exoskeleton control method for adaptive learning of assistive joint torque profiles in periodic tasks. We use human muscle activity as feedback to adapt the assistive joint torque behaviour in a way that the muscle activity is minimised. The user can then relax while the exoskeleton takes over the task execution. If the task is altered and the existing assistive behaviour becomes inadequate, the exoskeleton gradually adapts to the new task execution so that the increased muscle activity caused by the new desired task can be reduced. The advantage of the proposed method is that it does not require biomechanical or dynamical models. Our proposed learning system uses Dynamical Movement Primitives (DMPs) as a trajectory generator and parameters of DMPs are modulated using Locally Weighted Regression. Then, the learning system is combined with adaptive oscillators that determine the phase and frequency of motion according to measured Electromyography (EMG) signals. We tested the method with real robot experiments where subjects wearing an elbow exoskeleton had to move an object of an unknown mass according to a predefined reference motion. We further evaluated the proposed approach on a whole-arm exoskeleton to show that it is able to adaptively derive assistive torques even for multiple-joint motion.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Muscle Mechanics},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose an exoskeleton control method for adaptive learning of assistive joint torque profiles in periodic tasks. We use human muscle activity as feedback to adapt the assistive joint torque behaviour in a way that the muscle activity is minimised. The user can then relax while the exoskeleton takes over the task execution. If the task is altered and the existing assistive behaviour becomes inadequate, the exoskeleton gradually adapts to the new task execution so that the increased muscle activity caused by the new desired task can be reduced. The advantage of the proposed method is that it does not require biomechanical or dynamical models. Our proposed learning system uses Dynamical Movement Primitives (DMPs) as a trajectory generator and parameters of DMPs are modulated using Locally Weighted Regression. Then, the learning system is combined with adaptive oscillators that determine the phase and frequency of motion according to measured Electromyography (EMG) signals. We tested the method with real robot experiments where subjects wearing an elbow exoskeleton had to move an object of an unknown mass according to a predefined reference motion. We further evaluated the proposed approach on a whole-arm exoskeleton to show that it is able to adaptively derive assistive torques even for multiple-joint motion.
2013
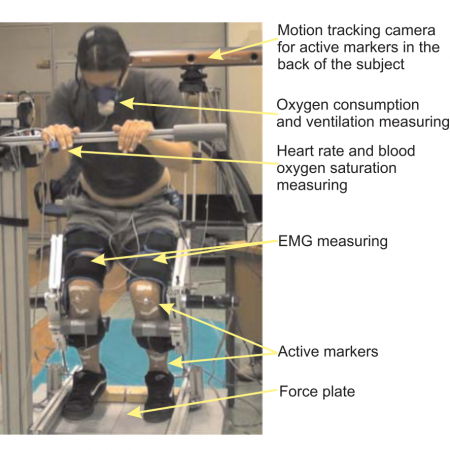
Petrič, Tadej; Gams, Andrej; Debevec, Tadej; Žlajpah, Leon; Babič, Jan
Control approaches for robotic knee exoskeleton and their effects on human motion Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 993–1002, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Petric2013a,
title = {Control approaches for robotic knee exoskeleton and their effects on human motion},
author = {Tadej Petri\v{c} and Andrej Gams and Tadej Debevec and Leon \v{Z}lajpah and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.804164},
doi = {10.1080/01691864.2013.804164},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {993--1002},
publisher = {Taylor \& Francis},
abstract = {In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics. In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics. In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics.
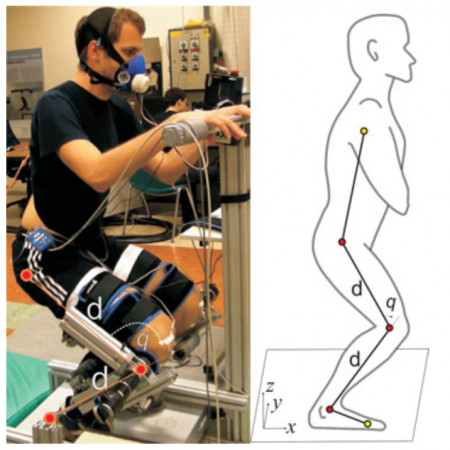
Gams, Andrej; Petrič, Tadej; Debevec, Tadej; Babič, Jan
Effects of Robotic Knee Exoskeleton on Human Energy Expenditure Journal Article
In: IEEE Transactions on Biomedical Engineering, vol. 60, no. 6, pp. 1636–1644, 2013, ISSN: 0018-9294.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Gams2013,
title = {Effects of Robotic Knee Exoskeleton on Human Energy Expenditure},
author = {Andrej Gams and Tadej Petri\v{c} and Tadej Debevec and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6414598/},
doi = {10.1109/TBME.2013.2240682},
issn = {0018-9294},
year = {2013},
date = {2013-06-01},
journal = {IEEE Transactions on Biomedical Engineering},
volume = {60},
number = {6},
pages = {1636--1644},
abstract = {A number of studies discuss the design and control of various exoskeleton mechanisms, yet relatively few address the effect on the energy expenditure of the user. In this paper, we discuss the effect of a performance augmenting exoskeleton on the metabolic cost of an able-bodied user/pilot during periodic squatting. We investigated whether an exoskeleton device will significantly reduce the metabolic cost and what is the influence of the chosen device control strategy. By measuring oxygen consumption, minute ventilation, heart rate, blood oxygenation, and muscle EMG during 5-min squatting series, at one squat every 2 s, we show the effects of using a prototype robotic knee exoskeleton under three different noninvasive control approaches: gravity compensation approach, position-based approach, and a novel oscillator-based approach. The latter proposes a novel control that ensures synchronization of the device and the user. Statistically significant decrease in physiological responses can be observed when using the robotic knee exoskeleton under gravity compensation and oscillator-based control. On the other hand, the effects of position-based control were not significant in all parameters although all approaches significantly reduced the energy expenditure during squatting.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
A number of studies discuss the design and control of various exoskeleton mechanisms, yet relatively few address the effect on the energy expenditure of the user. In this paper, we discuss the effect of a performance augmenting exoskeleton on the metabolic cost of an able-bodied user/pilot during periodic squatting. We investigated whether an exoskeleton device will significantly reduce the metabolic cost and what is the influence of the chosen device control strategy. By measuring oxygen consumption, minute ventilation, heart rate, blood oxygenation, and muscle EMG during 5-min squatting series, at one squat every 2 s, we show the effects of using a prototype robotic knee exoskeleton under three different noninvasive control approaches: gravity compensation approach, position-based approach, and a novel oscillator-based approach. The latter proposes a novel control that ensures synchronization of the device and the user. Statistically significant decrease in physiological responses can be observed when using the robotic knee exoskeleton under gravity compensation and oscillator-based control. On the other hand, the effects of position-based control were not significant in all parameters although all approaches significantly reduced the energy expenditure during squatting.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si