




2023
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Khoramshahi, Mahdi; Jarrassé, Nathanaël
A guide to inter-joint coordination characterization for discrete movements: a comparative study Journal Article
In: Journal of NeuroEngineering and Rehabilitation, vol. 20, no. 1, pp. 132, 2023, ISSN: 1743-0003.
Abstract | BibTeX | Tags: Dynamic Motion, Kinematics | Links:
@article{dubois2023Guide,
title = {A guide to inter-joint coordination characterization for discrete movements: a comparative study},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Mahdi Khoramshahi and Nathana\"{e}l Jarrass\'{e}},
url = {https://doi.org/10.1186/s12984-023-01252-2},
doi = {10.1186/s12984-023-01252-2},
issn = {1743-0003},
year = {2023},
date = {2023-09-30},
urldate = {2023-09-30},
journal = {Journal of NeuroEngineering and Rehabilitation},
volume = {20},
number = {1},
pages = {132},
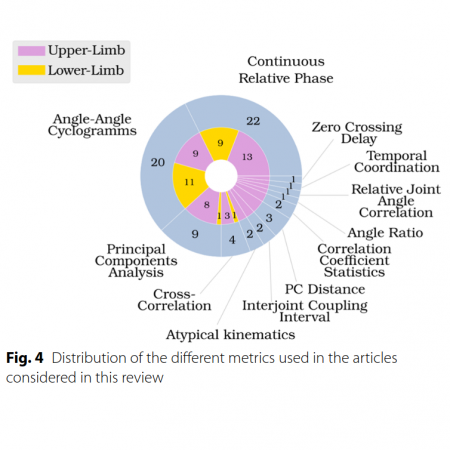
abstract = {Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results.},
keywords = {Dynamic Motion, Kinematics},
pubstate = {published},
tppubtype = {article}
}
Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results.
2019
Kunavar, Tjaša; Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Characteristics of human whole body motor learning Proceedings Article
In: Turkey Robotics Conference, TORK 2019, Özyegin University, Istanbul, 2019.
Abstract | BibTeX | Tags: Dynamic Motion, Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2019b,
title = { Characteristics of human whole body motor learning},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2019},
date = {2019-06-01},
booktitle = {Turkey Robotics Conference, TORK 2019},
address = {\"{O}zyegin University, Istanbul},
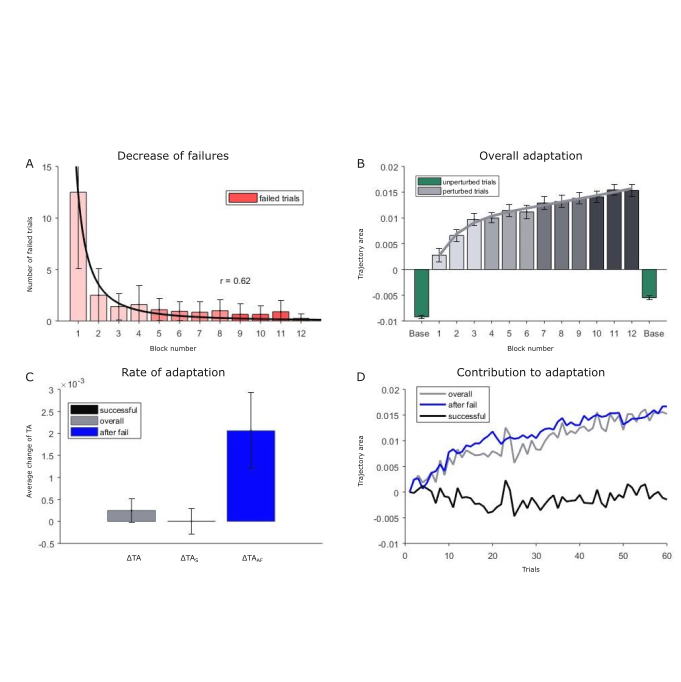
abstract = {Human whole body movement was observed in order to better understand how humans are able to learn motion and adapt to perturbation. This paper presents preliminary results of our experiment and a simple dynamic model that can simulate motion trajectories.},
keywords = {Dynamic Motion, Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Human whole body movement was observed in order to better understand how humans are able to learn motion and adapt to perturbation. This paper presents preliminary results of our experiment and a simple dynamic model that can simulate motion trajectories.
2016

Ivaldi, Serena; Babič, Jan; Mistry, Michael; Murphy, Robin
Special issue on whole-body control of contacts and dynamics for humanoid robots Journal Article
In: Autonomous Robots, vol. 40, no. 3, pp. 425–428, 2016, ISSN: 0929-5593.
BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion, Force Control | Links:
@article{Ivaldi2016,
title = {Special issue on whole-body control of contacts and dynamics for humanoid robots},
author = {Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Robin Murphy},
url = {http://link.springer.com/10.1007/s10514-016-9545-5},
doi = {10.1007/s10514-016-9545-5},
issn = {0929-5593},
year = {2016},
date = {2016-03-01},
journal = {Autonomous Robots},
volume = {40},
number = {3},
pages = {425--428},
keywords = {Compliance and Impedance Control, Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
Gams, Andrej; Petrič, Tadej; Do, Martin; Nemec, Bojan; Morimoto, Jun; Asfour, Tamim; Ude, Aleš
Adaptation and coaching of periodic motion primitives through physical and visual interaction Journal Article
In: Robotics and Autonomous Systems, vol. 75, pp. 340–351, 2016, ISSN: 09218890.
Abstract | BibTeX | Tags: Dynamic Motion, Force Control | Links:
@article{Gams2016,
title = {Adaptation and coaching of periodic motion primitives through physical and visual interaction},
author = {Andrej Gams and Tadej Petri\v{c} and Martin Do and Bojan Nemec and Jun Morimoto and Tamim Asfour and Ale\v{s} Ude},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889015001992},
doi = {10.1016/j.robot.2015.09.011},
issn = {09218890},
year = {2016},
date = {2016-01-01},
journal = {Robotics and Autonomous Systems},
volume = {75},
pages = {340--351},
publisher = {Elsevier B.V.},
abstract = {In this paper we propose and evaluate a control system to (1) learn and (2) adapt robot motion for continuous non-rigid contact with the environment. We present the approach in the context of wiping surfaces with robots. Our approach is based on learning by demonstration. First an initial periodic motion, covering the essence of the wiping task, is transferred from a human to a robot. The system extracts and learns one period of motion. Once the user/demonstrator is content with the motion, the robot seeks and establishes contact with a given surface, maintaining a predefined force of contact through force feedback. The shape of the surface is encoded for the complete period of motion, but the robot can adapt to a different surface, perturbations or obstacles. The novelty stems from the fact that the feedforward component is learned and encoded in a dynamic movement primitive. By using the feedforward component, the feedback component is greatly reduced if not completely canceled. Finally, if the user is not satisfied with the periodic pattern, he/she can change parts of motion through predefined gestures or through physical contact in a manner of a tutor or a coach. The complete system thus allows not only a transfer of motion, but a transfer of motion with matching correspondences, i.e. wiping motion is constrained to maintain physical contact with the surface to be wiped. The interface for both learning and adaptation is simple and intuitive and allows for fast and reliable knowledge transfer to the robot. Simulated and real world results in the application domain of wiping a surface are presented on three different robotic platforms. Results of the three robotic platforms, namely a 7 degree-of-freedom Kuka LWR-4 robot, the ARMAR-IIIa humanoid platform and the Sarcos CB-i humanoid robot, depict different methods of adaptation to the environment and coaching.},
keywords = {Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose and evaluate a control system to (1) learn and (2) adapt robot motion for continuous non-rigid contact with the environment. We present the approach in the context of wiping surfaces with robots. Our approach is based on learning by demonstration. First an initial periodic motion, covering the essence of the wiping task, is transferred from a human to a robot. The system extracts and learns one period of motion. Once the user/demonstrator is content with the motion, the robot seeks and establishes contact with a given surface, maintaining a predefined force of contact through force feedback. The shape of the surface is encoded for the complete period of motion, but the robot can adapt to a different surface, perturbations or obstacles. The novelty stems from the fact that the feedforward component is learned and encoded in a dynamic movement primitive. By using the feedforward component, the feedback component is greatly reduced if not completely canceled. Finally, if the user is not satisfied with the periodic pattern, he/she can change parts of motion through predefined gestures or through physical contact in a manner of a tutor or a coach. The complete system thus allows not only a transfer of motion, but a transfer of motion with matching correspondences, i.e. wiping motion is constrained to maintain physical contact with the surface to be wiped. The interface for both learning and adaptation is simple and intuitive and allows for fast and reliable knowledge transfer to the robot. Simulated and real world results in the application domain of wiping a surface are presented on three different robotic platforms. Results of the three robotic platforms, namely a 7 degree-of-freedom Kuka LWR-4 robot, the ARMAR-IIIa humanoid platform and the Sarcos CB-i humanoid robot, depict different methods of adaptation to the environment and coaching.
2013
Petrič, Tadej; Gams, Andrej; Babič, Jan; Žlajpah, Leon
Reflexive stability control framework for humanoid robots Journal Article
In: Autonomous Robots, vol. 34, no. 4, pp. 347–361, 2013, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Postural Balance | Links:
@article{Petric2013,
title = {Reflexive stability control framework for humanoid robots},
author = {Tadej Petri\v{c} and Andrej Gams and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {http://link.springer.com/10.1007/s10514-013-9329-0},
doi = {10.1007/s10514-013-9329-0},
issn = {0929-5593},
year = {2013},
date = {2013-01-01},
journal = {Autonomous Robots},
volume = {34},
number = {4},
pages = {347--361},
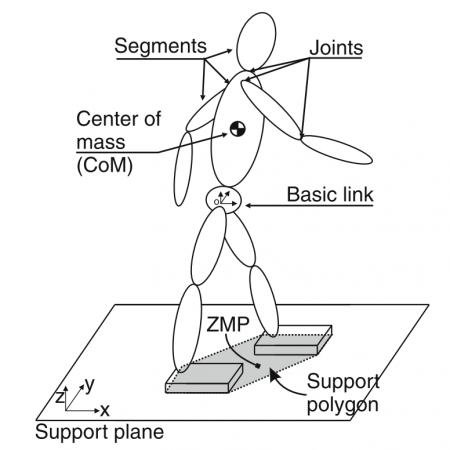
abstract = {In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
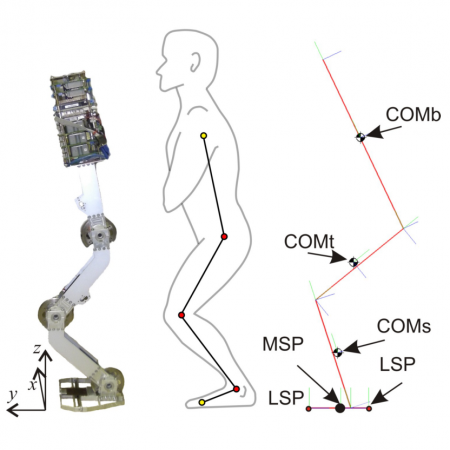
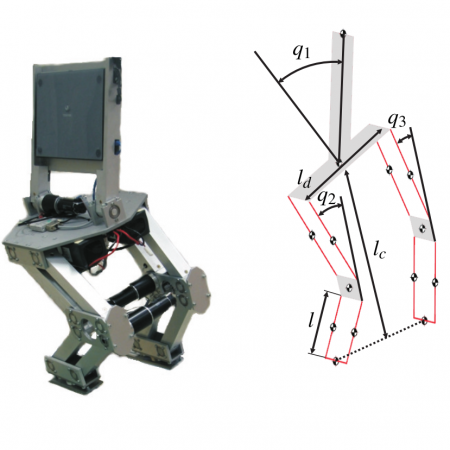
In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.
2011
Gams, Andrej; Petrič, Tadej; Babič, Jan; Žlajpah, Leon; Ude, Aleš
Constraining movement imitation with reflexive behavior: Robot squatting Proceedings Article
In: 2011 11th IEEE-RAS International Conference on Humanoid Robots, pp. 294–299, IEEE, Bled, 2011, ISBN: 978-1-61284-868-6.
Abstract | BibTeX | Tags: Dynamic Motion, Postural Balance | Links:
@inproceedings{Gams2011,
title = {Constraining movement imitation with reflexive behavior: Robot squatting},
author = {Andrej Gams and Tadej Petri\v{c} and Jan Babi\v{c} and Leon \v{Z}lajpah and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/6100816/},
doi = {10.1109/Humanoids.2011.6100816},
isbn = {978-1-61284-868-6},
year = {2011},
date = {2011-10-01},
booktitle = {2011 11th IEEE-RAS International Conference on Humanoid Robots},
pages = {294--299},
publisher = {IEEE},
address = {Bled},
abstract = {Direct imitation of human movement with a hu- manoid robot, which has a similar kinematic structure, does not guarantee a successful completion of the task because of different dynamical properties. Our research starts by showing how to apply a generalization algorithm to extract the desired movement primitives from multiple human demonstrations. The emphasis of the paper is on a method that constrains the extracted movement primitives when mapping them to a robot, taking into account a critical criterion of the task. As a practical example we study the stability of a robot, which is determined through a normalized zero-moment-point. Our approach is based on prioritized task control and allows direct movement transfer as long as the selected criterion is met. It only constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has higher priority than the desired, conscious movement. We demonstrate the properties of the algorithm on a real, human- inspired leg robot developed in our laboratory.},
keywords = {Dynamic Motion, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Direct imitation of human movement with a hu- manoid robot, which has a similar kinematic structure, does not guarantee a successful completion of the task because of different dynamical properties. Our research starts by showing how to apply a generalization algorithm to extract the desired movement primitives from multiple human demonstrations. The emphasis of the paper is on a method that constrains the extracted movement primitives when mapping them to a robot, taking into account a critical criterion of the task. As a practical example we study the stability of a robot, which is determined through a normalized zero-moment-point. Our approach is based on prioritized task control and allows direct movement transfer as long as the selected criterion is met. It only constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has higher priority than the desired, conscious movement. We demonstrate the properties of the algorithm on a real, human- inspired leg robot developed in our laboratory.
Petrič, Tadej; Nemec, Bojan; Babič, Jan; Žlajpah, Leon
Multilayer control of skiing robot Proceedings Article
In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4832–4837, IEEE, San Francisco, 2011, ISBN: 978-1-61284-454-1.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion | Links:
@inproceedings{Petric2011,
title = {Multilayer control of skiing robot},
author = {Tadej Petri\v{c} and Bojan Nemec and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {https://ieeexplore.ieee.org/document/6094546/},
doi = {10.1109/IROS.2011.6048154},
isbn = {978-1-61284-454-1},
year = {2011},
date = {2011-09-01},
booktitle = {2011 IEEE/RSJ International Conference on Intelligent Robots and Systems},
pages = {4832--4837},
publisher = {IEEE},
address = {San Francisco},
abstract = {In this paper we propose a novel method for ensuring stability of a skiing robot on a previously unknown ski slope. The method is based on a null-space velocity control algorithm, which is essential for achieving good behavior of redundant robotic systems. Using the pseudo-inverse, the task and the null-space motions are decoupled. For the skiing robot, the primary task is stability, the secondary task is the direction and the third task is the pose of the robot. The dynamic stability index of the skiing robot is defined with the normalized zero moment point. We demonstrated the effectiveness of the proposed method both in simulation in the virtual reality environment as well as on the real robot.},
keywords = {Compliance and Impedance Control, Dynamic Motion},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel method for ensuring stability of a skiing robot on a previously unknown ski slope. The method is based on a null-space velocity control algorithm, which is essential for achieving good behavior of redundant robotic systems. Using the pseudo-inverse, the task and the null-space motions are decoupled. For the skiing robot, the primary task is stability, the secondary task is the direction and the third task is the pose of the robot. The dynamic stability index of the skiing robot is defined with the normalized zero moment point. We demonstrated the effectiveness of the proposed method both in simulation in the virtual reality environment as well as on the real robot.
Babič, Jan; Hale, Joshua; Oztop, Erhan
Human sensorimotor learning for humanoid robot skill synthesis Journal Article
In: Adaptive Behavior, vol. 19, no. 4, pp. 250–263, 2011, ISSN: 1059-7123.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Babic2011b,
title = {Human sensorimotor learning for humanoid robot skill synthesis},
author = {Jan Babi\v{c} and Joshua Hale and Erhan Oztop},
url = {http://journals.sagepub.com/doi/10.1177/1059712311411112},
doi = {10.1177/1059712311411112},
issn = {1059-7123},
year = {2011},
date = {2011-01-01},
journal = {Adaptive Behavior},
volume = {19},
number = {4},
pages = {250--263},
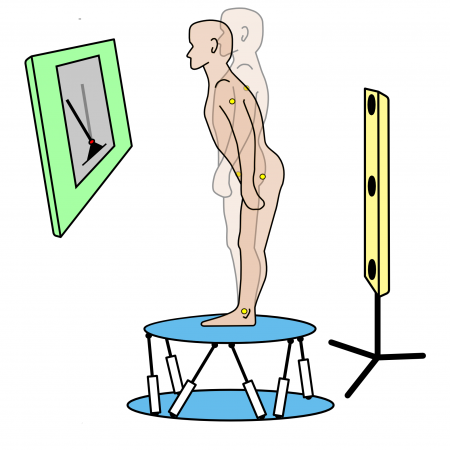
abstract = {Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.
Petrič, Tadej; Gams, Andrej; Ijspeert, Auke J; Žlajpah, Leon
On-line frequency adaptation and movement imitation for rhythmic robotic tasks Journal Article
In: The International Journal of Robotics Research, vol. 30, no. 14, pp. 1775–1788, 2011, ISSN: 0278-3649.
Abstract | BibTeX | Tags: Dynamic Motion, Kinematics | Links:
@article{Petric2011a,
title = {On-line frequency adaptation and movement imitation for rhythmic robotic tasks},
author = {Tadej Petri\v{c} and Andrej Gams and Auke J Ijspeert and Leon \v{Z}lajpah},
url = {http://journals.sagepub.com/doi/10.1177/0278364911421511},
doi = {10.1177/0278364911421511},
issn = {0278-3649},
year = {2011},
date = {2011-01-01},
journal = {The International Journal of Robotics Research},
volume = {30},
number = {14},
pages = {1775--1788},
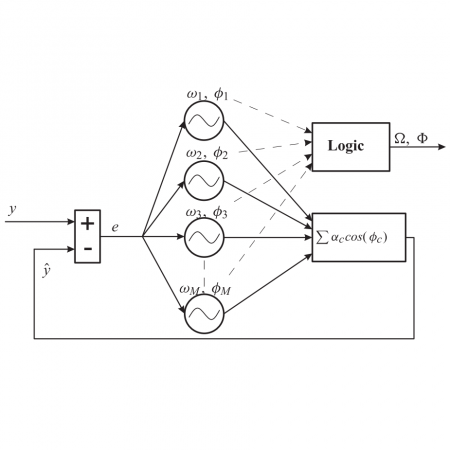
abstract = {In this paper we present a novel method to obtain the basic frequency of an unknown periodic signal with an arbitrary waveform, which can work online with no additional signal processing or logical operations. The method originates from non-linear dynamical systems for frequency extraction, which are based on adaptive frequency oscillators in a feedback loop. In previous work, we had developed a method that could extract separate frequency components by using several adaptive frequency oscillators in a loop, but that method required a logical algorithm to identify the basic frequency. The novel method presented here uses a Fourier series representation in the feedback loop combined with a single oscillator. In this way it can extract the frequency and the phase of an unknown periodic signal in real time and without any additional signal processing or preprocessing. The method determines the Fourier series coefficients and can be used for dynamic Fourier series implementation. The proposed method can be used for the control of rhythmic robotic tasks, where only the extraction of the basic frequency is crucial. For demonstration several highly non-linear and dynamic periodic robotic tasks are shown, including also a task where an electromyography (EMG) signal is used in a feedback loop.},
keywords = {Dynamic Motion, Kinematics},
pubstate = {published},
tppubtype = {article}
}
In this paper we present a novel method to obtain the basic frequency of an unknown periodic signal with an arbitrary waveform, which can work online with no additional signal processing or logical operations. The method originates from non-linear dynamical systems for frequency extraction, which are based on adaptive frequency oscillators in a feedback loop. In previous work, we had developed a method that could extract separate frequency components by using several adaptive frequency oscillators in a loop, but that method required a logical algorithm to identify the basic frequency. The novel method presented here uses a Fourier series representation in the feedback loop combined with a single oscillator. In this way it can extract the frequency and the phase of an unknown periodic signal in real time and without any additional signal processing or preprocessing. The method determines the Fourier series coefficients and can be used for dynamic Fourier series implementation. The proposed method can be used for the control of rhythmic robotic tasks, where only the extraction of the basic frequency is crucial. For demonstration several highly non-linear and dynamic periodic robotic tasks are shown, including also a task where an electromyography (EMG) signal is used in a feedback loop.
2010
Kos, Andrej; Babič, Jan
Programming and control of humanoid robot football playing tasks Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 115–118, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Dynamic Motion | Links:
@inproceedings{Kos2010,
title = {Programming and control of humanoid robot football playing tasks},
author = {Andrej Kos and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/5524600/},
doi = {10.1109/RAAD.2010.5524600},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-06-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {115--118},
publisher = {IEEE},
address = {Budapest},
abstract = {The goal of our research was to create an application which could be used to program the humanoid robot with tasks needed to play football. The design of our system enables us to program sequential tasks. The tasks are constructed from a programmed logic interface and pre-programmed motions. This system is easy to use and can be adapted to perform different tasks. Because of its characteristics the system was used to demonstrate basic concepts of mobile humanoid robots to students.},
keywords = {Dynamic Motion},
pubstate = {published},
tppubtype = {inproceedings}
}
The goal of our research was to create an application which could be used to program the humanoid robot with tasks needed to play football. The design of our system enables us to program sequential tasks. The tasks are constructed from a programmed logic interface and pre-programmed motions. This system is easy to use and can be adapted to perform different tasks. Because of its characteristics the system was used to demonstrate basic concepts of mobile humanoid robots to students.
Gams, Andrej; Petrič, Tadej; Žlajpah, Leon; Ude, Aleš
Optimizing parameters of trajectory representation for movement generalization: robotic throwing Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 161–166, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Dynamic Motion, Optimal Control | Links:
@inproceedings{Gams2010,
title = {Optimizing parameters of trajectory representation for movement generalization: robotic throwing},
author = {Andrej Gams and Tadej Petri\v{c} and Leon \v{Z}lajpah and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/5524592/},
doi = {10.1109/RAAD.2010.5524592},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-01-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {161--166},
publisher = {IEEE},
address = {Budapest},
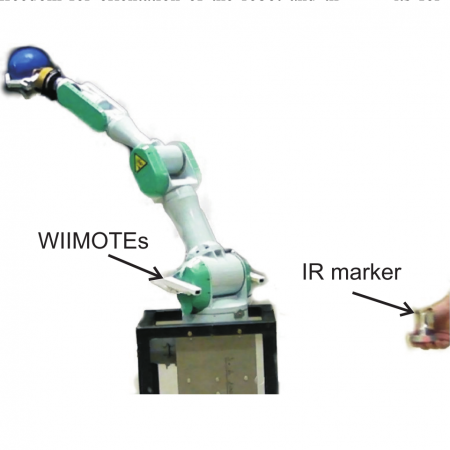
abstract = {For effective use of learning by imitation with a robot, it is necessary that the robot can adapt to the current state of the external world. This paper describes an optimization approach that enables the generation of a new motion trajectory, which accomplishes the task in a given situation, based on a library of example movements. New movements are generated by applying statistical methods, where the current state of the world is utilized as query into the library. Dynamic movement primitives are employed as the underlying motor representation. The main contribution of this paper is the optimization of dynamic movement primitives with respect to the kernel function positions and over the entire set of demonstrated movements. We applied the algorithm to a robotic throwing task, where the location of the target is determined by a stereo vision system, which can detect infrared markers. The vision system uses two Nintendo WIIMOTEs for cameras.},
keywords = {Dynamic Motion, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
For effective use of learning by imitation with a robot, it is necessary that the robot can adapt to the current state of the external world. This paper describes an optimization approach that enables the generation of a new motion trajectory, which accomplishes the task in a given situation, based on a library of example movements. New movements are generated by applying statistical methods, where the current state of the world is utilized as query into the library. Dynamic movement primitives are employed as the underlying motor representation. The main contribution of this paper is the optimization of dynamic movement primitives with respect to the kernel function positions and over the entire set of demonstrated movements. We applied the algorithm to a robotic throwing task, where the location of the target is determined by a stereo vision system, which can detect infrared markers. The vision system uses two Nintendo WIIMOTEs for cameras.
2009
Babič, Jan; Lim, Bokman; Omrčen, Damir; Lenarčič, Jadran; Park, Frank C
A Biarticulated Robotic Leg for Jumping Movements: Theory and Experiments Journal Article
In: Journal of Mechanisms and Robotics, vol. 1, no. 1, pp. 011013, 2009, ISSN: 19424302.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@article{Babic2009,
title = {A Biarticulated Robotic Leg for Jumping Movements: Theory and Experiments},
author = {Jan Babi\v{c} and Bokman Lim and Damir Omr\v{c}en and Jadran Lenar\v{c}i\v{c} and Frank C Park},
url = {http://mechanismsrobotics.asmedigitalcollection.asme.org/article.aspx?articleid=1484860},
doi = {10.1115/1.2963028},
issn = {19424302},
year = {2009},
date = {2009-01-01},
journal = {Journal of Mechanisms and Robotics},
volume = {1},
number = {1},
pages = {011013},
abstract = {This paper investigates the extent to which biarticular actuation mechanisms\textemdashspring-driven redundant actuation schemes that extend over two joints, similar in function to biarticular muscles found in legged animals\textemdashimprove the performance of jumping and other fast explosive robot movements. Robust numerical optimization algorithms that take into account the complex dynamics of both the redundantly actuated system and frictional contact forces are developed. We then quantitatively evaluate the gains in vertical jumping vis-\`{a}-vis monoarticular and biarticular joint actuation schemes and examine the effects of spring stiffness and activation angle on overall jump performance. Both numerical simulations and experiments with a hardware prototype of a biarticular legged robot are reported.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {article}
}
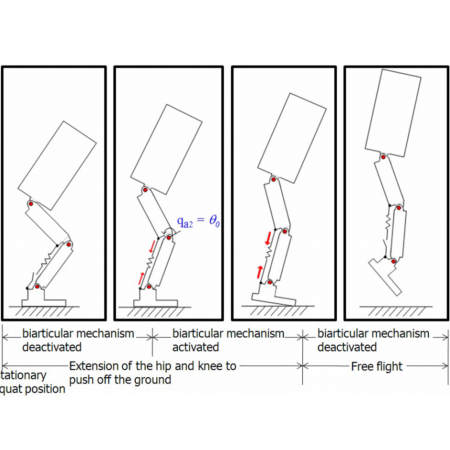
This paper investigates the extent to which biarticular actuation mechanisms—spring-driven redundant actuation schemes that extend over two joints, similar in function to biarticular muscles found in legged animals—improve the performance of jumping and other fast explosive robot movements. Robust numerical optimization algorithms that take into account the complex dynamics of both the redundantly actuated system and frictional contact forces are developed. We then quantitatively evaluate the gains in vertical jumping vis-à-vis monoarticular and biarticular joint actuation schemes and examine the effects of spring stiffness and activation angle on overall jump performance. Both numerical simulations and experiments with a hardware prototype of a biarticular legged robot are reported.
2008
Lim, Bokman; Babič, Jan; Park, Frank C
Optimal jumps for biarticular legged robots Proceedings Article
In: 2008 IEEE International Conference on Robotics and Automation, pp. 226–231, IEEE, Pasadena, 2008, ISBN: 978-1-4244-1646-2.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@inproceedings{Lim2008,
title = {Optimal jumps for biarticular legged robots},
author = {Bokman Lim and Jan Babi\v{c} and Frank C Park},
url = {http://ieeexplore.ieee.org/document/4543213/},
doi = {10.1109/ROBOT.2008.4543213},
isbn = {978-1-4244-1646-2},
year = {2008},
date = {2008-01-01},
booktitle = {2008 IEEE International Conference on Robotics and Automation},
pages = {226--231},
publisher = {IEEE},
address = {Pasadena},
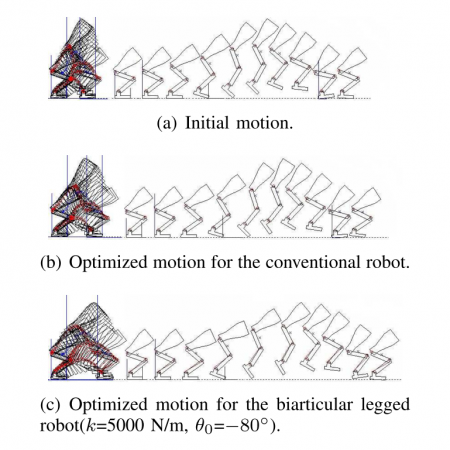
abstract = {This paper investigates the extent to which biar- ticular actuation mechanisms\textemdashantagonistic actuation schemes with spring stiffness that extend over two joints, similar in function to biarticular muscles found in legged animals\textemdash improve the performance of jumping and other fast explosive robot movements. Robust gradient-based optimization algo- rithms that take into account the dynamic properties and various contact and actuator constraints of biarticular systems are developed. We then quantitatively evaluate the gains in jumping vis-` a-vis conventional joint actuation schemes.We also examine the effects of biarticular link stiffness and link mass distributions on the jumping performance of the biarticular mechanism.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper investigates the extent to which biar- ticular actuation mechanisms—antagonistic actuation schemes with spring stiffness that extend over two joints, similar in function to biarticular muscles found in legged animals— improve the performance of jumping and other fast explosive robot movements. Robust gradient-based optimization algo- rithms that take into account the dynamic properties and various contact and actuator constraints of biarticular systems are developed. We then quantitatively evaluate the gains in jumping vis-` a-vis conventional joint actuation schemes.We also examine the effects of biarticular link stiffness and link mass distributions on the jumping performance of the biarticular mechanism.

Babič, Jan
Biarticular legged robot: Design and experiments Proceedings Article
In: 2008 IEEE International Conference on Robotics and Biomimetics, pp. 155–159, IEEE, Bangkok, 2008, ISBN: 978-1-4244-2678-2.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@inproceedings{Babic2008,
title = {Biarticular legged robot: Design and experiments},
author = {Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/4912996/},
doi = {10.1109/ROBIO.2009.4912996},
isbn = {978-1-4244-2678-2},
year = {2008},
date = {2008-01-01},
booktitle = {2008 IEEE International Conference on Robotics and Biomimetics},
pages = {155--159},
publisher = {IEEE},
address = {Bangkok},
abstract = {In the paper we describe the design process of a biarticular legged robotic system inspired by the anatomic properties or the human body and report the vertical jump experiments performed by the hardware prototype of the robot. We describe the starting points and the requirements that follow from the biomechanical properties of the human leg. Then we describe the CAD model of the robot and the construction of the real robotic system. Afterwards we show in detail the development of the dynamic model needed for simulation of the jump and for the control of the real robot. The vertical jump experiments are presented and analyzed in the last section.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
In the paper we describe the design process of a biarticular legged robotic system inspired by the anatomic properties or the human body and report the vertical jump experiments performed by the hardware prototype of the robot. We describe the starting points and the requirements that follow from the biomechanical properties of the human leg. Then we describe the CAD model of the robot and the construction of the real robotic system. Afterwards we show in detail the development of the dynamic model needed for simulation of the jump and for the control of the real robot. The vertical jump experiments are presented and analyzed in the last section.
2006

Babič, Jan; Lenarčič, Jadran
Optimization of biarticular gastrocnemious muscle in humanoid jumping robot simulation Journal Article
In: International Journal of Humanoid Robotics, vol. 3, no. 2, pp. 219–234, 2006, ISSN: 0219-8436.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@article{Babic2006,
title = {Optimization of biarticular gastrocnemious muscle in humanoid jumping robot simulation},
author = {Jan Babi\v{c} and Jadran Lenar\v{c}i\v{c}},
url = {http://www.worldscientific.com/doi/abs/10.1142/S0219843606000722},
doi = {10.1142/S0219843606000722},
issn = {0219-8436},
year = {2006},
date = {2006-01-01},
journal = {International Journal of Humanoid Robotics},
volume = {3},
number = {2},
pages = {219--234},
abstract = {We propose a new human inspired structure of the lower extremity mechanism by which a humanoid robot will be able to efficiently perform fast movements such as running and jumping. We build a dynamic model of the humanoid robot which includes an elastic model of the biarticular muscle gastrocnemius and determine the role of the biarticular muscles and the elastic tendons in performing the vertical jump. We demonstrate that biarticular links contribute a great deal to the performance of the vertical jump. We also show that timing of the biarticular link activation and stiffness of the biarticular link influence the height of the jump considerably.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {article}
}
We propose a new human inspired structure of the lower extremity mechanism by which a humanoid robot will be able to efficiently perform fast movements such as running and jumping. We build a dynamic model of the humanoid robot which includes an elastic model of the biarticular muscle gastrocnemius and determine the role of the biarticular muscles and the elastic tendons in performing the vertical jump. We demonstrate that biarticular links contribute a great deal to the performance of the vertical jump. We also show that timing of the biarticular link activation and stiffness of the biarticular link influence the height of the jump considerably.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si