




2023
Escarabajal, Rafael J.; París, Elena; Petrič, Tadej; Valera, Ángel; Mata, Vicente; Babič, Jan
Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes Proceedings Article
In: 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1-8, IEEE, 2023, ISBN: 979-8-3503-2570-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics | Links:
@inproceedings{Escarabajal2023,
title = {Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes},
author = {Rafael J. Escarabajal and Elena Par\'{i}s and Tadej Petri\v{c} and \'{A}ngel Valera and Vicente Mata and Jan Babi\v{c}},
doi = {10.1109/ROBIO58561.2023.10354618},
isbn = {979-8-3503-2570-6},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
pages = {1-8},
publisher = {IEEE},
abstract = {This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.
2020
Forman, Davis A; Forman, Garrick N; Avila-Mireles, Edwin Johnatan; Mugnosso, Maddalena; Zenzeri, Jacopo; Murphy, Bernadette; Holmes, Michael W R
Characterizing forearm muscle activity in university-aged males during dynamic radial-ulnar deviation of the wrist using a wrist robot Journal Article
In: Journal of Biomechanics, vol. 108, pp. 109897, 2020, ISSN: 18732380.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020b,
title = {Characterizing forearm muscle activity in university-aged males during dynamic radial-ulnar deviation of the wrist using a wrist robot},
author = {Davis A Forman and Garrick N Forman and Edwin Johnatan Avila-Mireles and Maddalena Mugnosso and Jacopo Zenzeri and Bernadette Murphy and Michael W R Holmes},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020303201},
doi = {10.1016/j.jbiomech.2020.109897},
issn = {18732380},
year = {2020},
date = {2020-07-01},
journal = {Journal of Biomechanics},
volume = {108},
pages = {109897},
abstract = {Functioning as wrist stabilizers, the wrist extensor muscles exhibit higher levels of muscle activity than the flexors in most distal upper-limb tasks. However, this finding has been derived mostly from isometric or wrist flexion-extension protocols, with little consideration for wrist dynamics or radial-ulnar wrist deviations. The purpose of this study was to assess forearm muscle activity during the execution of dynamic wrist radial-ulnar deviation in various forearm orientations (pronation/supination). In 12 healthy university-aged males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic radial-ulnar deviation using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a radial or ulnar direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture influenced the muscles acting upon the hand (FDS/ED), whereas movement phase (concentric-eccentric) and torque direction influenced nearly every muscle. The ECR demonstrated the greatest task-dependency of all forearm muscles, which is possibly reflective of forearm muscle lines of action. Co-contraction ratios were much higher in radial trials than ulnar (Radial: 1.20 ± 0.78, Ulnar: 0.28 ± 0.18, P textless 0.05), suggesting greater FCU and ECU contribution to wrist joint stability in radial-ulnar movement. These findings highlight a greater complexity of wrist extensor function than has previously been reported in isometric work.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Functioning as wrist stabilizers, the wrist extensor muscles exhibit higher levels of muscle activity than the flexors in most distal upper-limb tasks. However, this finding has been derived mostly from isometric or wrist flexion-extension protocols, with little consideration for wrist dynamics or radial-ulnar wrist deviations. The purpose of this study was to assess forearm muscle activity during the execution of dynamic wrist radial-ulnar deviation in various forearm orientations (pronation/supination). In 12 healthy university-aged males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic radial-ulnar deviation using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a radial or ulnar direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture influenced the muscles acting upon the hand (FDS/ED), whereas movement phase (concentric-eccentric) and torque direction influenced nearly every muscle. The ECR demonstrated the greatest task-dependency of all forearm muscles, which is possibly reflective of forearm muscle lines of action. Co-contraction ratios were much higher in radial trials than ulnar (Radial: 1.20 ± 0.78, Ulnar: 0.28 ± 0.18, P textless 0.05), suggesting greater FCU and ECU contribution to wrist joint stability in radial-ulnar movement. These findings highlight a greater complexity of wrist extensor function than has previously been reported in isometric work.

Forman, Davis A; Forman, Garrick N; Avila-Mireles, Edwin Johnatan; Mugnosso, Maddalena; Zenzeri, Jacopo; Murphy, Bernadette; Holmes, Michael W R
Characterizing forearm muscle activity in young adults during dynamic wrist flexion–extension movement using a wrist robot Journal Article
In: Journal of Biomechanics, vol. 108, pp. 109908, 2020, ISSN: 18732380.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020,
title = {Characterizing forearm muscle activity in young adults during dynamic wrist flexion\textendashextension movement using a wrist robot},
author = {Davis A Forman and Garrick N Forman and Edwin Johnatan Avila-Mireles and Maddalena Mugnosso and Jacopo Zenzeri and Bernadette Murphy and Michael W R Holmes},
url = {https://doi.org/10.1016/j.jbiomech.2020.109908},
doi = {10.1016/j.jbiomech.2020.109908},
issn = {18732380},
year = {2020},
date = {2020-01-01},
journal = {Journal of Biomechanics},
volume = {108},
pages = {109908},
publisher = {Elsevier Ltd},
abstract = {Current research suggests that the wrist extensor muscles function as the primary stabilizers of the wrist-joint complex. However, most investigations have utilized isometric study designs, with little consideration for wrist dynamics or changes in posture. The purpose of the present study was to assess forearm muscle activity during the execution of dynamic wrist flexion/extension in multiple forearm orientations (pronation/supination). In 12 young adult males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic wrist flexion/extension using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a flexion or extension direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture had minimal influence on forearm muscle activity, but significantly altered the activity of the biceps and triceps brachii. Movement phase (concentric-eccentric) dictated muscle activity in every muscle. Interestingly, muscle activity in the eccentric phase was equal between the two applied handle torques, regardless of whether the muscle acted as the agonist or antagonist. Co-contraction ratios were higher in the flexion conditions (flexion: 2.28 ± 2.04, extension: 0.32 ± 0.27), suggesting significantly greater wrist extensor activity\textendashlikely a contribution to wrist joint stability. This highlights the vulnerability of the wrist extensor muscles to overuse injuries in settings requiring prolonged use of dynamic wrist exertions.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Current research suggests that the wrist extensor muscles function as the primary stabilizers of the wrist-joint complex. However, most investigations have utilized isometric study designs, with little consideration for wrist dynamics or changes in posture. The purpose of the present study was to assess forearm muscle activity during the execution of dynamic wrist flexion/extension in multiple forearm orientations (pronation/supination). In 12 young adult males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic wrist flexion/extension using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a flexion or extension direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture had minimal influence on forearm muscle activity, but significantly altered the activity of the biceps and triceps brachii. Movement phase (concentric-eccentric) dictated muscle activity in every muscle. Interestingly, muscle activity in the eccentric phase was equal between the two applied handle torques, regardless of whether the muscle acted as the agonist or antagonist. Co-contraction ratios were higher in the flexion conditions (flexion: 2.28 ± 2.04, extension: 0.32 ± 0.27), suggesting significantly greater wrist extensor activity–likely a contribution to wrist joint stability. This highlights the vulnerability of the wrist extensor muscles to overuse injuries in settings requiring prolonged use of dynamic wrist exertions.
Forman, Garrick N; Forman, Davis A; Avila-Mireles, Edwin Johnatan; Zenzeri, Jacopo; Holmes, Michael W R
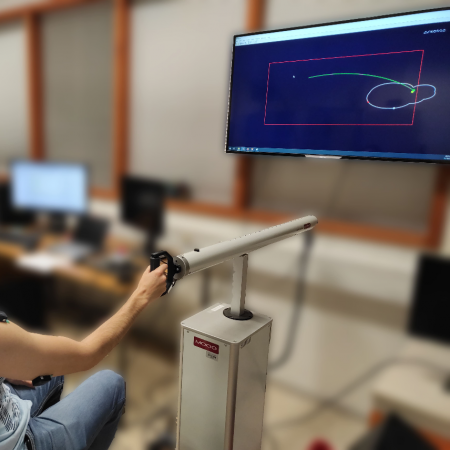
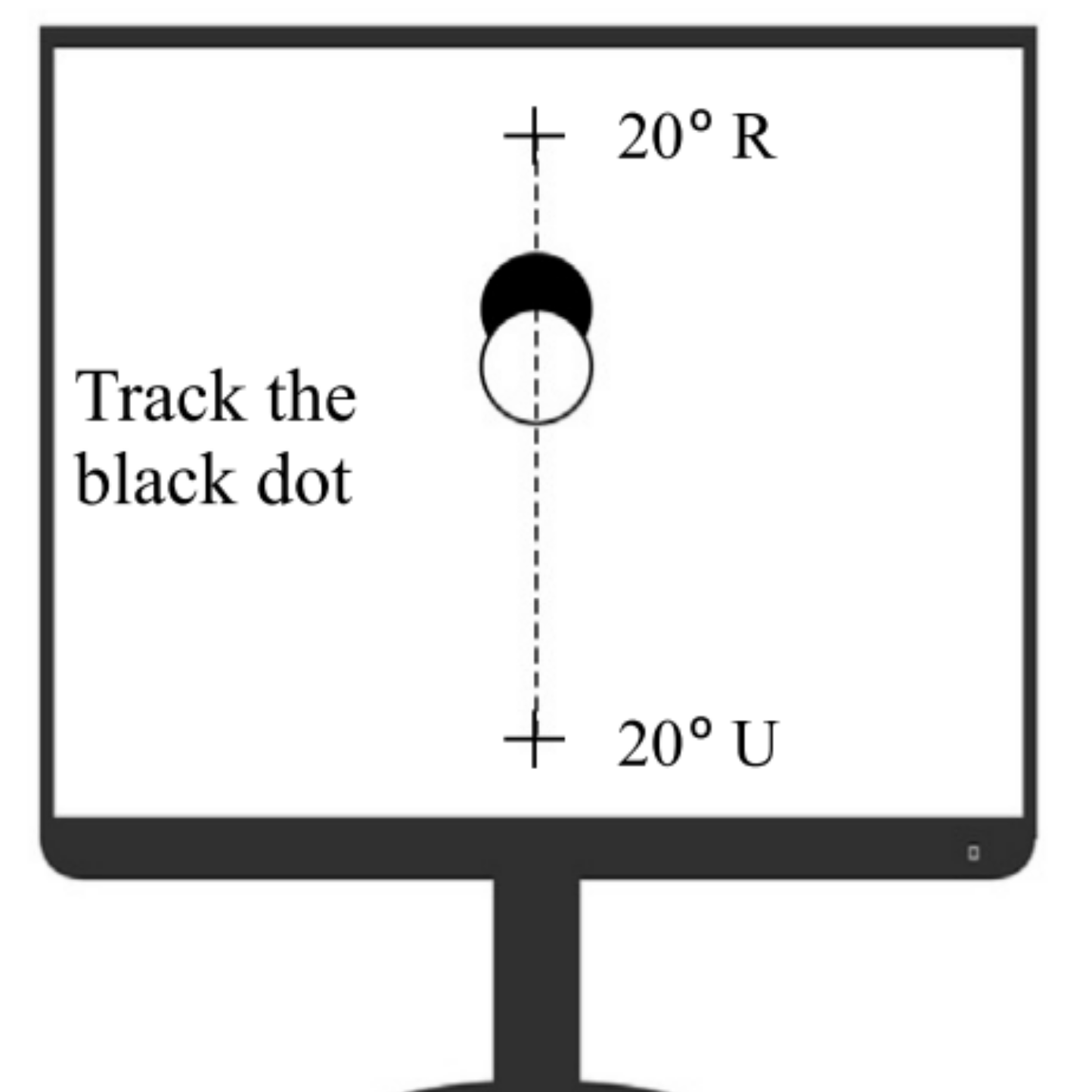
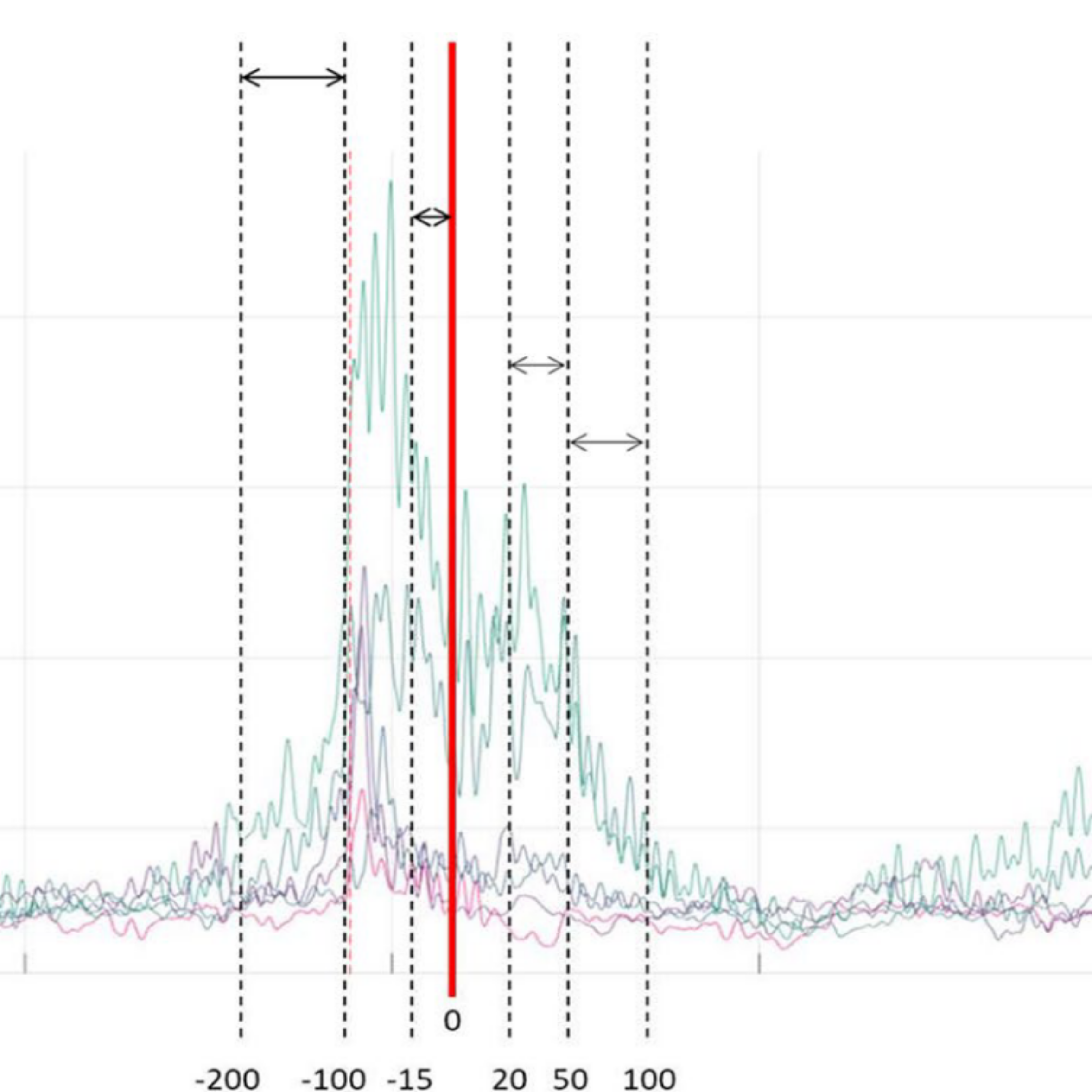
Investigating the Muscular and Kinematic Responses to Sudden Wrist Perturbations During a Dynamic Tracking Task Journal Article
In: Scientific Reports, vol. 10, no. 1, pp. 1-13, 2020, ISSN: 20452322.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020a,
title = {Investigating the Muscular and Kinematic Responses to Sudden Wrist Perturbations During a Dynamic Tracking Task},
author = {Garrick N Forman and Davis A Forman and Edwin Johnatan Avila-Mireles and Jacopo Zenzeri and Michael W R Holmes},
url = {http://dx.doi.org/10.1038/s41598-020-61117-9},
doi = {10.1038/s41598-020-61117-9},
issn = {20452322},
year = {2020},
date = {2020-01-01},
journal = {Scientific Reports},
volume = {10},
number = {1},
pages = {1-13},
publisher = {Springer US},
abstract = {Sudden disturbances (perturbations) to the hand and wrist are commonplace in daily activities and workplaces when interacting with tools and the environment. It is important to understand how perturbations influence forearm musculature and task performance when identifying injury mechanisms. The purpose of this work was to evaluate changes in forearm muscle activity and co-contraction caused by wrist perturbations during a dynamic wrist tracking task. Surface electromyography was recorded from eight muscles of the upper-limb. Participants performed trials consisting of 17 repetitions of ±40° of wrist flexion/extension using a robotic device. During trials, participants received radial or ulnar perturbations that were delivered during flexion or extension, and with known or unknown timing. Co-contraction ratios for all muscle pairs showed significantly greater extensor activity across all experimental conditions. Of all antagonistic muscle pairs, the flexor carpi radialis (FCR)-extensor carpi radialis (ECR) muscle pair had the greatest change in co-contraction, producing 1602% greater co-contraction during flexion trials than during extensions trials. Expected perturbations produced greater anticipatory (immediately prior to the perturbation) muscle activity than unexpected, resulting in a 30% decrease in wrist displacement. While improving performance, this increase in anticipatory muscle activity may leave muscles susceptible to early-onset fatigue, which could lead to chronic overuse injuries in the workplace.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Sudden disturbances (perturbations) to the hand and wrist are commonplace in daily activities and workplaces when interacting with tools and the environment. It is important to understand how perturbations influence forearm musculature and task performance when identifying injury mechanisms. The purpose of this work was to evaluate changes in forearm muscle activity and co-contraction caused by wrist perturbations during a dynamic wrist tracking task. Surface electromyography was recorded from eight muscles of the upper-limb. Participants performed trials consisting of 17 repetitions of ±40° of wrist flexion/extension using a robotic device. During trials, participants received radial or ulnar perturbations that were delivered during flexion or extension, and with known or unknown timing. Co-contraction ratios for all muscle pairs showed significantly greater extensor activity across all experimental conditions. Of all antagonistic muscle pairs, the flexor carpi radialis (FCR)-extensor carpi radialis (ECR) muscle pair had the greatest change in co-contraction, producing 1602% greater co-contraction during flexion trials than during extensions trials. Expected perturbations produced greater anticipatory (immediately prior to the perturbation) muscle activity than unexpected, resulting in a 30% decrease in wrist displacement. While improving performance, this increase in anticipatory muscle activity may leave muscles susceptible to early-onset fatigue, which could lead to chronic overuse injuries in the workplace.
2019

Gorjan, Daša; Babič, Jan; Šarabon, Nejc; Potocanac, Zrinka
Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults Journal Article
In: Journal of Biomechanics, vol. 91, pp. 1–6, 2019, ISSN: 18732380.
Abstract | BibTeX | Tags: Kinematics, Muscle Mechanics, Postural Balance | Links:
@article{Gorjan2019,
title = {Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults},
author = {Da\v{s}a Gorjan and Jan Babi\v{c} and Nejc \v{S}arabon and Zrinka Potocanac},
url = {http://www.sciencedirect.com/science/article/pii/S0021929018307292},
doi = {10.1016/j.jbiomech.2018.09.008},
issn = {18732380},
year = {2019},
date = {2019-01-01},
journal = {Journal of Biomechanics},
volume = {91},
pages = {1--6},
abstract = {Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p \< .001, RMS p ≤ .001, MPF p \< .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p \< .001), SD (p \< .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.},
keywords = {Kinematics, Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p < .001, RMS p ≤ .001, MPF p < .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p < .001), SD (p < .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.
2018

Šarabon, Nejc; Mekjavić, Igor B; Eiken, Ola; Babič, Jan
The Effect of Bed Rest and Hypoxic Environment on Postural Balance and Trunk Automatic (Re)Actions in Young Healthy Males Journal Article
In: Frontiers in Physiology, vol. 9, pp. 27, 2018, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Muscle Mechanics, Postural Balance | Links:
@article{Sarabon2018,
title = {The Effect of Bed Rest and Hypoxic Environment on Postural Balance and Trunk Automatic (Re)Actions in Young Healthy Males},
author = {Nejc \v{S}arabon and Igor B Mekjavi\'{c} and Ola Eiken and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fphys.2018.00027/full},
doi = {10.3389/fphys.2018.00027},
issn = {1664-042X},
year = {2018},
date = {2018-01-01},
journal = {Frontiers in Physiology},
volume = {9},
pages = {27},
publisher = {Frontiers},
abstract = {Prolonged inactivity, such as bed rest induces several detrimental changes within a short timeframe. Impaired postural balance and responses of trunk muscles to (un)expected perturbations were both shown to be impaired after bed rest. Certain populations (e.g. astronauts) are exposed to hypoxic environment in addition to inactivity, similar to bed rest. While the isolated negative effects of hypoxia on postural balance have been observed before, no study to date has examined the combined effects of hypoxia and bed rest on postural balance or trunk muscle responses. In this study, we examined the effects of 21-day exposure to three conditions: (i) bed rest in hypoxic environment (HBR), (ii) bed rest in normoxic environment (NBR), and (iii) ambulatory hypoxic environment (HAMB). Fourteen healthy male subjects crossed over between conditions in a randomized order, with a 4 month break between conditions to ensure full recovery. Most body sway parameters indicated a similar deterioration of postural balance following both HBR and NBR. Similarly, both anticipatory and reactive responses of the trunk muscles (m. erector spinae and m. multifidus) were impaired after HBR and NBR to a similar degree and mostly unchanged after HAMB. Certain body sway parameters were impaired after HAMB, confirming that hypoxia alone can undermine postural balance. On the other hand, some trunk responses were improved after HAMB. In conclusion, the results of our study confirmed previous findings on negative effects of bed rest, but showed little or no additional effect of hypoxia during bed rest. Physical activity during bed rest is encouraged to preserve neuromuscular functions of the trunk. While the HBR condition in our study resembled conditions during space missions, our results could be relevant to other populations, such as patients with pulmonary diseases exposed to bed rest.},
keywords = {Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Prolonged inactivity, such as bed rest induces several detrimental changes within a short timeframe. Impaired postural balance and responses of trunk muscles to (un)expected perturbations were both shown to be impaired after bed rest. Certain populations (e.g. astronauts) are exposed to hypoxic environment in addition to inactivity, similar to bed rest. While the isolated negative effects of hypoxia on postural balance have been observed before, no study to date has examined the combined effects of hypoxia and bed rest on postural balance or trunk muscle responses. In this study, we examined the effects of 21-day exposure to three conditions: (i) bed rest in hypoxic environment (HBR), (ii) bed rest in normoxic environment (NBR), and (iii) ambulatory hypoxic environment (HAMB). Fourteen healthy male subjects crossed over between conditions in a randomized order, with a 4 month break between conditions to ensure full recovery. Most body sway parameters indicated a similar deterioration of postural balance following both HBR and NBR. Similarly, both anticipatory and reactive responses of the trunk muscles (m. erector spinae and m. multifidus) were impaired after HBR and NBR to a similar degree and mostly unchanged after HAMB. Certain body sway parameters were impaired after HAMB, confirming that hypoxia alone can undermine postural balance. On the other hand, some trunk responses were improved after HAMB. In conclusion, the results of our study confirmed previous findings on negative effects of bed rest, but showed little or no additional effect of hypoxia during bed rest. Physical activity during bed rest is encouraged to preserve neuromuscular functions of the trunk. While the HBR condition in our study resembled conditions during space missions, our results could be relevant to other populations, such as patients with pulmonary diseases exposed to bed rest.
Dežman, Miha; Babič, Jan; Gams, Andrej
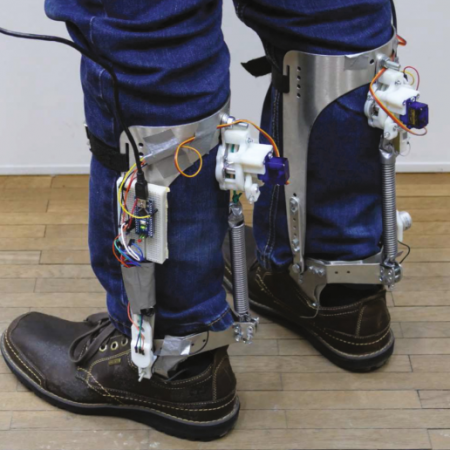
Qualitative Assessment of a Clutch-Actuated Ankle Exoskeleton Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 778–786, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Muscle Mechanics | Links:
@incollection{Dezman2018,
title = {Qualitative Assessment of a Clutch-Actuated Ankle Exoskeleton},
author = {Miha De\v{z}man and Jan Babi\v{c} and Andrej Gams},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_82},
doi = {10.1007/978-3-319-61276-8_82},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {778--786},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Among the growing number of different exoskeletons, passive and quasi-passive solutions hold the upper-hand compared to powered solutions in price, accessibility, complexity, weight and user acceptance. This paper evaluates a modification of an originally passive ankle ex- oskeleton with an active clutch, making it quasi-passive. We developed an electric quasi-passive clutch to improve the performance of the orig- inal exoskeleton design, with the aim of mitigating the problems on the clutch engagement timing and user physiological variability. In order to evaluate the exoskeleton and the clutch operation, we performed a study where 7 users wore the exoskeleton and performed trial walks. Qualita- tive user feedback that focused on the device comfort, users perception of exoskeletons effect and smoothness of the clutch operation was col- lected, along with quantitative data on clutch operation during walking on a flat surface. Results show improved and more reliable exoskeleton clutch operation which was also expressed in qualitative user feedback.},
keywords = {Exoskeleton Design and Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {incollection}
}
Among the growing number of different exoskeletons, passive and quasi-passive solutions hold the upper-hand compared to powered solutions in price, accessibility, complexity, weight and user acceptance. This paper evaluates a modification of an originally passive ankle ex- oskeleton with an active clutch, making it quasi-passive. We developed an electric quasi-passive clutch to improve the performance of the orig- inal exoskeleton design, with the aim of mitigating the problems on the clutch engagement timing and user physiological variability. In order to evaluate the exoskeleton and the clutch operation, we performed a study where 7 users wore the exoskeleton and performed trial walks. Qualita- tive user feedback that focused on the device comfort, users perception of exoskeletons effect and smoothness of the clutch operation was col- lected, along with quantitative data on clutch operation during walking on a flat surface. Results show improved and more reliable exoskeleton clutch operation which was also expressed in qualitative user feedback.

Cevzar, Mišel; Petrič, Tadej; Babič, Jan
Open Source EMG Device for Controlling a Robotic Hand Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 797–804, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Machine Learning, Muscle Mechanics | Links:
@incollection{Cevzar2018,
title = {Open Source EMG Device for Controlling a Robotic Hand},
author = {Mi\v{s}el Cevzar and Tadej Petri\v{c} and Jan Babi\v{c}},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_84},
doi = {10.1007/978-3-319-61276-8_84},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {797--804},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Off-the-shelf electronic market is large, diverse and easily accessible by many. Credit card size computers (example: Raspberry Pi) or micro-controller boards (example: Arduino) can be used for learning how to code and how to control embedded systems. Nevertheless, there is a lack of off-the-shelf, open source devices that would enable us to learn about and make use of human signal processing. An example of such a device is an electromyograph (EMG). In this paper we investigated, if an EMG device could fulfill the aforementioned gap. EMG device we used for conducting our experiment was a five channel open source EMG Arduino shield. The performance of the device was evaluated on three healthy male subjects. They were instructed to perform basic finger movements which we classified and executed on the robotic hand. The EMG signal classification was performed using a Support Vector Machine (SVM) algorithm. In our experimental setup the average EMG signal classification accuracy was 78.29%. This we believe demonstrates there are EMG devices on the market today that provide access to cost effective prototyping and learning about EMG signals.},
keywords = {Machine Learning, Muscle Mechanics},
pubstate = {published},
tppubtype = {incollection}
}
Off-the-shelf electronic market is large, diverse and easily accessible by many. Credit card size computers (example: Raspberry Pi) or micro-controller boards (example: Arduino) can be used for learning how to code and how to control embedded systems. Nevertheless, there is a lack of off-the-shelf, open source devices that would enable us to learn about and make use of human signal processing. An example of such a device is an electromyograph (EMG). In this paper we investigated, if an EMG device could fulfill the aforementioned gap. EMG device we used for conducting our experiment was a five channel open source EMG Arduino shield. The performance of the device was evaluated on three healthy male subjects. They were instructed to perform basic finger movements which we classified and executed on the robotic hand. The EMG signal classification was performed using a Support Vector Machine (SVM) algorithm. In our experimental setup the average EMG signal classification accuracy was 78.29%. This we believe demonstrates there are EMG devices on the market today that provide access to cost effective prototyping and learning about EMG signals.
2016
Peternel, Luka; Noda, Tomoyuki; Petrič, Tadej; Ude, Aleš; Morimoto, Jun; Babič, Jan
Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation Journal Article
In: PLOS ONE, vol. 11, no. 2, pp. e0148942, 2016, ISSN: 1932-6203.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Muscle Mechanics | Links:
@article{Peternel2016b,
title = {Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation},
author = {Luka Peternel and Tomoyuki Noda and Tadej Petri\v{c} and Ale\v{s} Ude and Jun Morimoto and Jan Babi\v{c}},
editor = {Dingguo Zhang},
url = {http://dx.plos.org/10.1371/journal.pone.0148942},
doi = {10.1371/journal.pone.0148942},
issn = {1932-6203},
year = {2016},
date = {2016-02-01},
journal = {PLOS ONE},
volume = {11},
number = {2},
pages = {e0148942},
abstract = {In this paper we propose an exoskeleton control method for adaptive learning of assistive joint torque profiles in periodic tasks. We use human muscle activity as feedback to adapt the assistive joint torque behaviour in a way that the muscle activity is minimised. The user can then relax while the exoskeleton takes over the task execution. If the task is altered and the existing assistive behaviour becomes inadequate, the exoskeleton gradually adapts to the new task execution so that the increased muscle activity caused by the new desired task can be reduced. The advantage of the proposed method is that it does not require biomechanical or dynamical models. Our proposed learning system uses Dynamical Movement Primitives (DMPs) as a trajectory generator and parameters of DMPs are modulated using Locally Weighted Regression. Then, the learning system is combined with adaptive oscillators that determine the phase and frequency of motion according to measured Electromyography (EMG) signals. We tested the method with real robot experiments where subjects wearing an elbow exoskeleton had to move an object of an unknown mass according to a predefined reference motion. We further evaluated the proposed approach on a whole-arm exoskeleton to show that it is able to adaptively derive assistive torques even for multiple-joint motion.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Muscle Mechanics},
pubstate = {published},
tppubtype = {article}
}
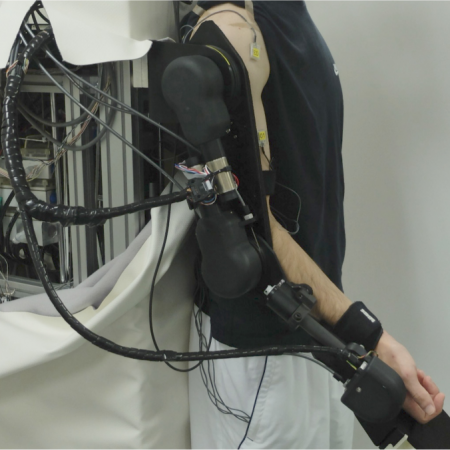
In this paper we propose an exoskeleton control method for adaptive learning of assistive joint torque profiles in periodic tasks. We use human muscle activity as feedback to adapt the assistive joint torque behaviour in a way that the muscle activity is minimised. The user can then relax while the exoskeleton takes over the task execution. If the task is altered and the existing assistive behaviour becomes inadequate, the exoskeleton gradually adapts to the new task execution so that the increased muscle activity caused by the new desired task can be reduced. The advantage of the proposed method is that it does not require biomechanical or dynamical models. Our proposed learning system uses Dynamical Movement Primitives (DMPs) as a trajectory generator and parameters of DMPs are modulated using Locally Weighted Regression. Then, the learning system is combined with adaptive oscillators that determine the phase and frequency of motion according to measured Electromyography (EMG) signals. We tested the method with real robot experiments where subjects wearing an elbow exoskeleton had to move an object of an unknown mass according to a predefined reference motion. We further evaluated the proposed approach on a whole-arm exoskeleton to show that it is able to adaptively derive assistive torques even for multiple-joint motion.
2015
Peternel, Luka; Ugurlu, Barkan; Babič, Jan; Morimoto, Jun
Assessments on the improved modelling for pneumatic artificial muscle actuators Proceedings Article
In: 2015 International Conference on Advanced Robotics (ICAR), pp. 34–39, IEEE, Istanbul, 2015, ISBN: 978-1-4673-7509-2.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Muscle Mechanics | Links:
@inproceedings{Peternel2015b,
title = {Assessments on the improved modelling for pneumatic artificial muscle actuators},
author = {Luka Peternel and Barkan Ugurlu and Jan Babi\v{c} and Jun Morimoto},
url = {http://ieeexplore.ieee.org/document/7251430/},
doi = {10.1109/ICAR.2015.7251430},
isbn = {978-1-4673-7509-2},
year = {2015},
date = {2015-01-01},
booktitle = {2015 International Conference on Advanced Robotics (ICAR)},
pages = {34--39},
publisher = {IEEE},
address = {Istanbul},
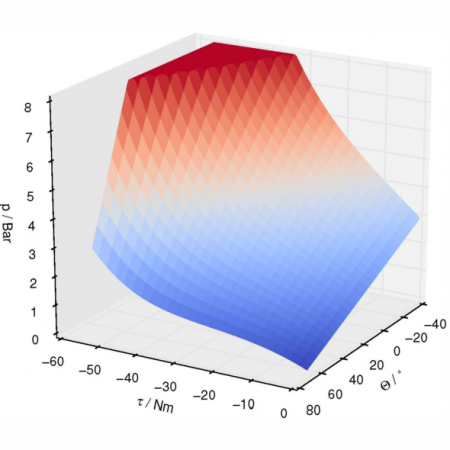
abstract = {In this paper, we present an analysis regarding the pneumatic air muscle modelling, with a particular emphasis on the exoskeleton robot control. We propose two calibration approaches for obtaining the model identification data. We used the measurement data acquired from the proposed approaches to identify different mathematical models of pneumatic muscles. These models specified the necessary muscle control pressure for the desired muscle force at a given muscle length value. We compared the performance between the different types of models identified by either of the calibration method. The identified model with the lowest validation error was implemented in pneumatic muscle control for an elbow exoskeleton system. As a result, the system exhibited satisfactory torque and position control tasks, adequately validating the proposed approach.},
keywords = {Exoskeleton Design and Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper, we present an analysis regarding the pneumatic air muscle modelling, with a particular emphasis on the exoskeleton robot control. We propose two calibration approaches for obtaining the model identification data. We used the measurement data acquired from the proposed approaches to identify different mathematical models of pneumatic muscles. These models specified the necessary muscle control pressure for the desired muscle force at a given muscle length value. We compared the performance between the different types of models identified by either of the calibration method. The identified model with the lowest validation error was implemented in pneumatic muscle control for an elbow exoskeleton system. As a result, the system exhibited satisfactory torque and position control tasks, adequately validating the proposed approach.
2010
Škorja, Goran; Babič, Jan
Postural Control Analysis during Angular Perturbations of the Support Surface Book Section
In: Lim, Chwee T; Goh, James C H (Ed.): IFMBE Proceedings, vol. 31 IFMBE, pp. 969–972, Springer, 2010, ISSN: 16800737.
Abstract | BibTeX | Tags: Muscle Mechanics, Postural Balance | Links:
@incollection{Skorja2010,
title = {Postural Control Analysis during Angular Perturbations of the Support Surface},
author = {Goran \v{S}korja and Jan Babi\v{c}},
editor = {Chwee T Lim and James C H Goh},
url = {http://link.springer.com/10.1007/978-3-642-14515-5_247},
doi = {10.1007/978-3-642-14515-5_247},
issn = {16800737},
year = {2010},
date = {2010-01-01},
booktitle = {IFMBE Proceedings},
volume = {31 IFMBE},
pages = {969--972},
publisher = {Springer},
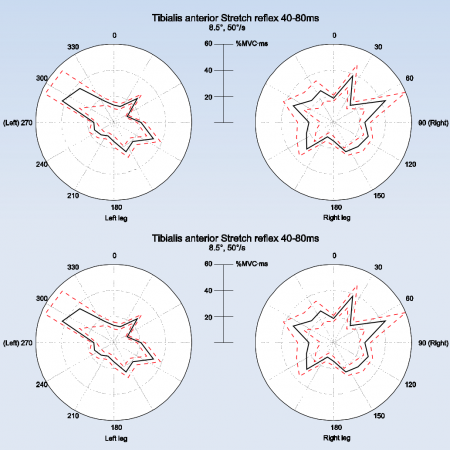
abstract = {The purpose of the study was to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. Instead of a simple tilting platform to induce rotational perturbations of the support surface used in the previous studies, we used a Stewart parallel platform with an integrated force platform that enabled the subjects to actively control the orientation of the platform by shifting their centre of mass position. In contrast to the previous studies where the muscular responses had no effect on the motion of the subject and were in some sense isometric responses, our reported muscular responses result in the motion of the subject's body and are therefore a better approximation to the real-world situations. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses based on the visual stimuli. We also showed the effectiveness of the muscles to counter the perturbations in different directions. The results show that the perturbations in anterior-posterior direction were compensated more efficiently than the perturbations in medial-lateral direction.},
keywords = {Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {incollection}
}
The purpose of the study was to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. Instead of a simple tilting platform to induce rotational perturbations of the support surface used in the previous studies, we used a Stewart parallel platform with an integrated force platform that enabled the subjects to actively control the orientation of the platform by shifting their centre of mass position. In contrast to the previous studies where the muscular responses had no effect on the motion of the subject and were in some sense isometric responses, our reported muscular responses result in the motion of the subject's body and are therefore a better approximation to the real-world situations. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses based on the visual stimuli. We also showed the effectiveness of the muscles to counter the perturbations in different directions. The results show that the perturbations in anterior-posterior direction were compensated more efficiently than the perturbations in medial-lateral direction.
2004
Babič, Jan; Lenarčič, Jadran
In vivo determination of triceps surae muscle-tendon complex viscoelastic properties Journal Article
In: European Journal of Applied Physiology, vol. 92, no. 4-5, pp. 477–84, 2004, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Biarticular Muscle, Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Babic2004,
title = {In vivo determination of triceps surae muscle-tendon complex viscoelastic properties},
author = {Jan Babi\v{c} and Jadran Lenar\v{c}i\v{c}},
url = {http://link.springer.com/10.1007/s00421-004-1107-4},
doi = {10.1007/s00421-004-1107-4},
issn = {1439-6319},
year = {2004},
date = {2004-01-01},
journal = {European Journal of Applied Physiology},
volume = {92},
number = {4-5},
pages = {477--84},
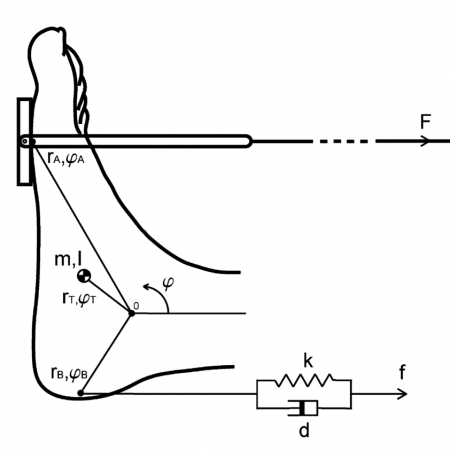
abstract = {Viscoelastic properties of muscles and tendons have an important influence on human motion performance. Proper determination of these properties is essential in the analysis and modelling of human motion dynamics. The purpose of our study was to develop a method for in vivo determination of the viscoelastic properties of the entire triceps surae muscle-tendon complex (MTC) including the gastrocnemius. Ten trained male subjects participated in this study. The measurement procedure consisted of two parts: soleus and Achilles tendon stiffness and viscosity were determined in the first part while the gastrocnemius stiffness and viscosity were determined in the second part. The measurement device and the procedure have been designed in such a manner that as few human body segments move as possible during the measurement. Thus, the measurement uncertainty due to the approximation of the properties of the human body segments was minimized. Triceps surae MTC viscoelastic properties of both legs were measured for each subject. There were no significant differences in viscoelastic coefficients for left and right lower extremities; however, there were noticeable differences between subjects. The soleus stiffness coefficient was greater than the gastrocnemius stiffness coefficient by 87.6 m(-1) in average. For all subjects, soleus viscosity was equal or greater than gastrocnemius viscosity. Values of viscoelastic parameters obtained by our method can be used in the analysis and modelling of human movement in situations where the knee joint is not necessarily flexed and there is coactivation of the soleus and the gastrocnemius.},
keywords = {Biarticular Muscle, Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Viscoelastic properties of muscles and tendons have an important influence on human motion performance. Proper determination of these properties is essential in the analysis and modelling of human motion dynamics. The purpose of our study was to develop a method for in vivo determination of the viscoelastic properties of the entire triceps surae muscle-tendon complex (MTC) including the gastrocnemius. Ten trained male subjects participated in this study. The measurement procedure consisted of two parts: soleus and Achilles tendon stiffness and viscosity were determined in the first part while the gastrocnemius stiffness and viscosity were determined in the second part. The measurement device and the procedure have been designed in such a manner that as few human body segments move as possible during the measurement. Thus, the measurement uncertainty due to the approximation of the properties of the human body segments was minimized. Triceps surae MTC viscoelastic properties of both legs were measured for each subject. There were no significant differences in viscoelastic coefficients for left and right lower extremities; however, there were noticeable differences between subjects. The soleus stiffness coefficient was greater than the gastrocnemius stiffness coefficient by 87.6 m(-1) in average. For all subjects, soleus viscosity was equal or greater than gastrocnemius viscosity. Values of viscoelastic parameters obtained by our method can be used in the analysis and modelling of human movement in situations where the knee joint is not necessarily flexed and there is coactivation of the soleus and the gastrocnemius.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si