




2024
Díaz, María Alejandra; Bock, Sander De; Beckerle, Philipp; Babič, Jan; Verstraten, Tom; Pauw, Kevin De
Human-in-the-loop optimization of wearable device parameters using an EMG-based objective function Journal Article
In: Wearable Technologies, vol. 5, pp. e15, 2024.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control | Links:
@article{nokey,
title = {Human-in-the-loop optimization of wearable device parameters using an EMG-based objective function},
author = {Mar\'{i}a Alejandra D\'{i}az and Sander De Bock and Philipp Beckerle and Jan Babi\v{c} and Tom Verstraten and Kevin De Pauw},
url = {https://doi.org/10.1017/wtc.2024.9},
doi = {10.1017/wtc.2024.9},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Wearable Technologies},
volume = {5},
pages = {e15},
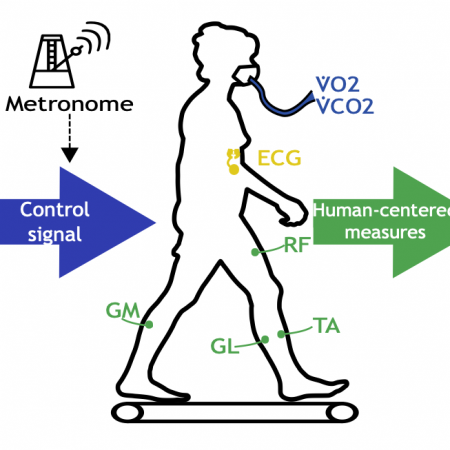
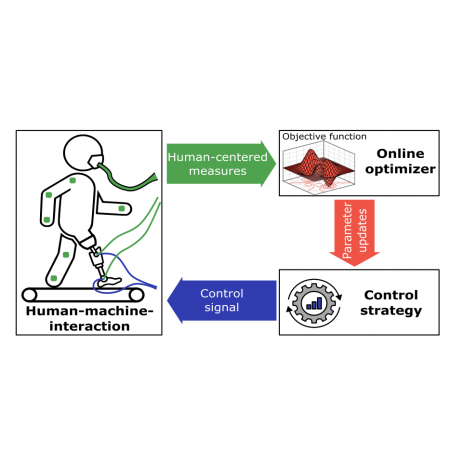
abstract = {Advancements in wearable robots aim to improve user motion, motor control, and overall experience by minimizing energetic cost (EC). However, EC is challenging to measure and it is typically indirectly estimated through respiratory gas analysis. This study introduces a novel EMG-based objective function that captures individuals\' natural energetic expenditure during walking. The objective function combines information from electromyography (EMG) variables such as intensity and muscle synergies. First, we demonstrate the similarity of the proposed objective function, calculated offline, to the EC during walking. Second, we minimize and validate the EMG-based objective function using an online Bayesian optimization algorithm. The walking step frequency is chosen as the parameter to optimize in both offline and online approaches in order to simplify experiments and facilitate comparisons with related research. Compared to existing studies that use EC as the objective function, results demonstrated that the optimization of the presented objective function reduced the number of iterations and, when compared with gradient descent optimization strategies, also reduced convergence time. Moreover, the algorithm effectively converges toward an optimal step frequency near the user\'s preferred frequency, positively influencing EC reduction. The good correlation between the estimated objective function and measured EC highlights its consistency and reliability. Thus, the proposed objective function could potentially optimize lower limb exoskeleton assistance and improve user performance and human-robot interaction without the need for challenging respiratory gas measurements. Impact Statement Wearable devices are important in assisting people, such as patients or older adults, during rehabilitation and everyday activities like walking. Some exoskeletons have been able to reduce the energy cost of walking. However, they require a cumbersome device to quantify it, making it impractical to use in real-life scenarios. Thus, we need to identify a way to assess energetic cost using wearable technologies. To address this, we introduced an EMG-based objective function that captures insights into energetic cost through muscle dynamics and motor coordination. Then, we minimized the proposed objective function online by optimizing walking step frequencies. We found that the EMG-based objective function highly correlates with energetic cost during walking. We also found that our algorithm effectively identifies an optimal step frequency that reduces participants\' energetic cost. These findings will facilitate the customization of the assistance in wearable assistive devices and its application in real situations.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Advancements in wearable robots aim to improve user motion, motor control, and overall experience by minimizing energetic cost (EC). However, EC is challenging to measure and it is typically indirectly estimated through respiratory gas analysis. This study introduces a novel EMG-based objective function that captures individuals' natural energetic expenditure during walking. The objective function combines information from electromyography (EMG) variables such as intensity and muscle synergies. First, we demonstrate the similarity of the proposed objective function, calculated offline, to the EC during walking. Second, we minimize and validate the EMG-based objective function using an online Bayesian optimization algorithm. The walking step frequency is chosen as the parameter to optimize in both offline and online approaches in order to simplify experiments and facilitate comparisons with related research. Compared to existing studies that use EC as the objective function, results demonstrated that the optimization of the presented objective function reduced the number of iterations and, when compared with gradient descent optimization strategies, also reduced convergence time. Moreover, the algorithm effectively converges toward an optimal step frequency near the user's preferred frequency, positively influencing EC reduction. The good correlation between the estimated objective function and measured EC highlights its consistency and reliability. Thus, the proposed objective function could potentially optimize lower limb exoskeleton assistance and improve user performance and human-robot interaction without the need for challenging respiratory gas measurements. Impact Statement Wearable devices are important in assisting people, such as patients or older adults, during rehabilitation and everyday activities like walking. Some exoskeletons have been able to reduce the energy cost of walking. However, they require a cumbersome device to quantify it, making it impractical to use in real-life scenarios. Thus, we need to identify a way to assess energetic cost using wearable technologies. To address this, we introduced an EMG-based objective function that captures insights into energetic cost through muscle dynamics and motor coordination. Then, we minimized the proposed objective function online by optimizing walking step frequencies. We found that the EMG-based objective function highly correlates with energetic cost during walking. We also found that our algorithm effectively identifies an optimal step frequency that reduces participants' energetic cost. These findings will facilitate the customization of the assistance in wearable assistive devices and its application in real situations.
2023
Segas, Effie; Mick, Sébastien; Leconte, Vincent; Dubois, Océane; Klotz, Rémi; Cattaert, Daniel; Rugy, Aymar
Intuitive movement-based prosthesis control enables arm amputees to reach naturally in virtual reality Journal Article
In: eLife, vol. 12, pp. RP87317, 2023, ISSN: 2050-084X.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Kinematics, Machine Learning | Links:
@article{segas2023intuitive,
title = {Intuitive movement-based prosthesis control enables arm amputees to reach naturally in virtual reality},
author = {Effie Segas and S\'{e}bastien Mick and Vincent Leconte and Oc\'{e}ane Dubois and R\'{e}mi Klotz and Daniel Cattaert and Aymar Rugy},
editor = {Kianoush Nazarpour and Tamar R Makin},
url = {https://doi.org/10.7554/eLife.87317},
doi = {10.7554/eLife.87317},
issn = {2050-084X},
year = {2023},
date = {2023-10-01},
urldate = {2023-10-01},
journal = {eLife},
volume = {12},
pages = {RP87317},
publisher = {eLife Sciences Publications, Ltd},
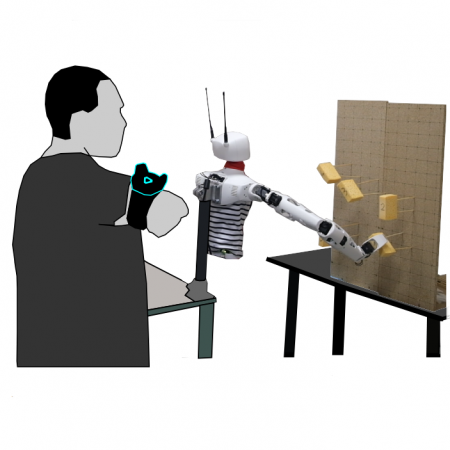
abstract = {Impressive progress is being made in bionic limbs design and control. Yet, controlling the numerous joints of a prosthetic arm necessary to place the hand at a correct position and orientation to grasp objects remains challenging. Here, we designed an intuitive, movement-based prosthesis control that leverages natural arm coordination to predict distal joints missing in people with transhumeral limb loss based on proximal residual limb motion and knowledge of the movement goal. This control was validated on 29 participants, including seven with above-elbow limb loss, who picked and placed bottles in a wide range of locations in virtual reality, with median success rates over 99% and movement times identical to those of natural movements. This control also enabled 15 participants, including three with limb differences, to reach and grasp real objects with a robotic arm operated according to the same principle. Remarkably, this was achieved without any prior training, indicating that this control is intuitive and instantaneously usable. It could be used for phantom limb pain management in virtual reality, or to augment the reaching capabilities of invasive neural interfaces usually more focused on hand and grasp control.},
keywords = {Human-in-the-Loop Control, Kinematics, Machine Learning},
pubstate = {published},
tppubtype = {article}
}
Impressive progress is being made in bionic limbs design and control. Yet, controlling the numerous joints of a prosthetic arm necessary to place the hand at a correct position and orientation to grasp objects remains challenging. Here, we designed an intuitive, movement-based prosthesis control that leverages natural arm coordination to predict distal joints missing in people with transhumeral limb loss based on proximal residual limb motion and knowledge of the movement goal. This control was validated on 29 participants, including seven with above-elbow limb loss, who picked and placed bottles in a wide range of locations in virtual reality, with median success rates over 99% and movement times identical to those of natural movements. This control also enabled 15 participants, including three with limb differences, to reach and grasp real objects with a robotic arm operated according to the same principle. Remarkably, this was achieved without any prior training, indicating that this control is intuitive and instantaneously usable. It could be used for phantom limb pain management in virtual reality, or to augment the reaching capabilities of invasive neural interfaces usually more focused on hand and grasp control.
Diaz, Maria Alejandra; Bock, Sander De; Beckerle, Philipp; Babič, Jan; Verstraten, Tom; Pauw, Kevin De
An EMG-Based Objective Function for Human-in-the-Loop Optimization. Proceedings Article
In: 2023 International Conference on Rehabilitation Robotics (ICORR), pp. 1-6, IEEE, 2023, ISSN: 1945-7901.
Abstract | BibTeX | Tags: Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control | Links:
@inproceedings{Diaz2023,
title = {An EMG-Based Objective Function for Human-in-the-Loop Optimization.},
author = {Maria Alejandra Diaz and Sander De Bock and Philipp Beckerle and Jan Babi\v{c} and Tom Verstraten and Kevin De Pauw},
doi = {10.1109/ICORR58425.2023.10304819},
issn = {1945-7901},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 International Conference on Rehabilitation Robotics (ICORR)},
journal = {IEEE ... International Conference on Rehabilitation Robotics : [proceedings]},
volume = {2023},
pages = {1-6},
publisher = {IEEE},
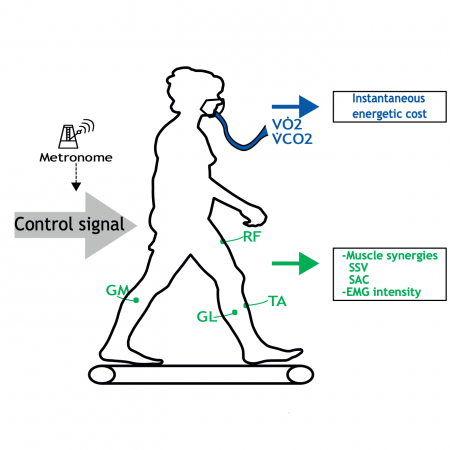
abstract = {Advancements in wearable robots aim to improve the users' motion, performance, and comfort by optimizing, mainly, energetic cost (EC). However, EC is a noisy measurement with a physiological delayed response that requires long evaluation periods and wearing an uncomfortable mask. This study aims to estimate and minimize an EMG-based objective function that describes the natural energetic expenditure of individuals walking. This objective is assessed by combining multiple electromyography (EMG) variables from the EMG intensity and muscle synergies. To evaluate this objective function simply and repeatedly, we prescribed step frequency (SF) via a metronome and optimized this frequency to minimize muscle activity demands. Further, a linear mixed-effects model was fitted for EC, with the EMG variables as fixed-effects and a random intercept that varies by participant. After the model was fitted to the data, a cubic polynomial was used to identify the optimal SF that reduces the overall EMG-based objective function. Our analysis outlines that the proposed objective function is comparable to the EC during walking, the primary objective function used in human-in-the-loop optimization. Thus, this EMG-based objective function could be potentially used to optimize wearable robots and improve human-robot interaction.},
keywords = {Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
Advancements in wearable robots aim to improve the users' motion, performance, and comfort by optimizing, mainly, energetic cost (EC). However, EC is a noisy measurement with a physiological delayed response that requires long evaluation periods and wearing an uncomfortable mask. This study aims to estimate and minimize an EMG-based objective function that describes the natural energetic expenditure of individuals walking. This objective is assessed by combining multiple electromyography (EMG) variables from the EMG intensity and muscle synergies. To evaluate this objective function simply and repeatedly, we prescribed step frequency (SF) via a metronome and optimized this frequency to minimize muscle activity demands. Further, a linear mixed-effects model was fitted for EC, with the EMG variables as fixed-effects and a random intercept that varies by participant. After the model was fitted to the data, a cubic polynomial was used to identify the optimal SF that reduces the overall EMG-based objective function. Our analysis outlines that the proposed objective function is comparable to the EC during walking, the primary objective function used in human-in-the-loop optimization. Thus, this EMG-based objective function could be potentially used to optimize wearable robots and improve human-robot interaction.
Díaz, María Alejandra; Voß, Matthias; Dillen, Arnau; Tassignon, Bruno; Flynn, Louis; Geeroms, Joost; Meeusen, Romain; Verstraten, Tom; Babič, Jan; Beckerle, Philipp; Pauw, Kevin De
Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human–Robot Interaction: A Systematic Review Journal Article
In: IEEE Transactions on Cybernetics, vol. 53, iss. 12, pp. 7483-7496, 2023, ISSN: 2168-2267.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Diaz2023b,
title = {Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human\textendashRobot Interaction: A Systematic Review},
author = {Mar\'{i}a Alejandra D\'{i}az and Matthias Vo\ss and Arnau Dillen and Bruno Tassignon and Louis Flynn and Joost Geeroms and Romain Meeusen and Tom Verstraten and Jan Babi\v{c} and Philipp Beckerle and Kevin De Pauw},
url = {https://ieeexplore.ieee.org/document/9994612/},
doi = {10.1109/TCYB.2022.3224895},
issn = {2168-2267},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {IEEE Transactions on Cybernetics},
volume = {53},
issue = {12},
pages = {7483-7496},
abstract = {This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human\textendashrobot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human\textendashmachine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human–robot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human–machine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.
Escarabajal, Rafael J.; París, Elena; Petrič, Tadej; Valera, Ángel; Mata, Vicente; Babič, Jan
Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes Proceedings Article
In: 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1-8, IEEE, 2023, ISBN: 979-8-3503-2570-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics | Links:
@inproceedings{Escarabajal2023,
title = {Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes},
author = {Rafael J. Escarabajal and Elena Par\'{i}s and Tadej Petri\v{c} and \'{A}ngel Valera and Vicente Mata and Jan Babi\v{c}},
doi = {10.1109/ROBIO58561.2023.10354618},
isbn = {979-8-3503-2570-6},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
pages = {1-8},
publisher = {IEEE},
abstract = {This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.
2022
Li, Yanan; Sena, Aran; Wang, Ziwei; Xing, Xueyan; Babič, Jan; Asseldonk, Edwin; Burdet, Etienne
A review on interaction control for contact robots through intent detection Journal Article
In: Progress in Biomedical Engineering, vol. 4, no. 3, pp. 032004, 2022, ISSN: 2516-1091.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Li2022,
title = {A review on interaction control for contact robots through intent detection},
author = {Yanan Li and Aran Sena and Ziwei Wang and Xueyan Xing and Jan Babi\v{c} and Edwin Asseldonk and Etienne Burdet},
url = {https://iopscience.iop.org/article/10.1088/2516-1091/ac8193},
doi = {10.1088/2516-1091/ac8193},
issn = {2516-1091},
year = {2022},
date = {2022-07-01},
urldate = {2022-07-01},
journal = {Progress in Biomedical Engineering},
volume = {4},
number = {3},
pages = {032004},
abstract = {Interaction control presents opportunities for contact robots physically interacting with their human user, such as assistance targeted to each human user, communication of goals to enable effective teamwork, and task-directed motion resistance in physical training and rehabilitation contexts. Here we review the burgeoning field of interaction control in the control theory and machine learning communities, by analysing the exchange of haptic information between the robot and its human user, and how they share the task effort. We first review the estimation and learning methods to predict the human user intent with the large uncertainty, variability and noise and limited observation of human motion. Based on this motion intent core, typical interaction control strategies are described using a homotopy of shared control parameters. Recent methods of haptic communication and game theory are then presented to consider the co-adaptation of human and robot control and yield versatile interactive control as observed between humans. Finally, the limitations of the presented state of the art are discussed and directions for future research are outlined.},
keywords = {Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Interaction control presents opportunities for contact robots physically interacting with their human user, such as assistance targeted to each human user, communication of goals to enable effective teamwork, and task-directed motion resistance in physical training and rehabilitation contexts. Here we review the burgeoning field of interaction control in the control theory and machine learning communities, by analysing the exchange of haptic information between the robot and its human user, and how they share the task effort. We first review the estimation and learning methods to predict the human user intent with the large uncertainty, variability and noise and limited observation of human motion. Based on this motion intent core, typical interaction control strategies are described using a homotopy of shared control parameters. Recent methods of haptic communication and game theory are then presented to consider the co-adaptation of human and robot control and yield versatile interactive control as observed between humans. Finally, the limitations of the presented state of the art are discussed and directions for future research are outlined.
2021
Kim, Wansoo; Peternel, Luka; Lorenzini, Marta; Babič, Jan; Ajoudani, Arash
A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools Journal Article
In: Robotics and Computer-Integrated Manufacturing, vol. 68, pp. 102084, 2021, ISSN: 07365845.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Kim2021,
title = {A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools},
author = {Wansoo Kim and Luka Peternel and Marta Lorenzini and Jan Babi\v{c} and Arash Ajoudani},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0736584520302945},
doi = {10.1016/j.rcim.2020.102084},
issn = {07365845},
year = {2021},
date = {2021-04-01},
journal = {Robotics and Computer-Integrated Manufacturing},
volume = {68},
pages = {102084},
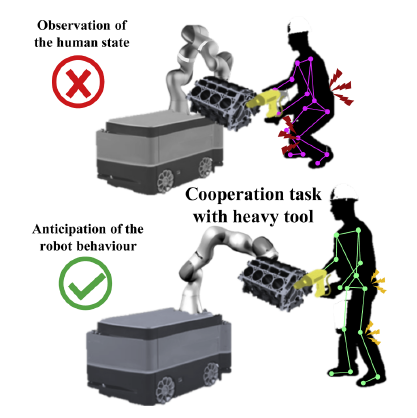
abstract = {In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.},
keywords = {Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.
2020
Elobaid, Mohamed; Hu, Yue; Romualdi, Giulio; Dafarra, Stefano; Babič, Jan; Pucci, Daniele
Telexistence and Teleoperation for Walking Humanoid Robots Book Section
In: Advances in Intelligent Systems and Computing, pp. 1106–1121, 2020, ISSN: 21945365.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@incollection{Elobaid2020,
title = {Telexistence and Teleoperation for Walking Humanoid Robots},
author = {Mohamed Elobaid and Yue Hu and Giulio Romualdi and Stefano Dafarra and Jan Babi\v{c} and Daniele Pucci},
url = {http://link.springer.com/10.1007/978-3-030-29513-4_80 http://arxiv.org/abs/1809.01578 http://dx.doi.org/10.1007/978-3-030-29513-4_80},
doi = {10.1007/978-3-030-29513-4_80},
issn = {21945365},
year = {2020},
date = {2020-09-01},
booktitle = {Advances in Intelligent Systems and Computing},
pages = {1106--1121},
abstract = {This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.},
keywords = {Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {incollection}
}
This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.
2018
Teramae, Tatsuya; Ishihara, Koji; Babič, Jan; Morimoto, Jun; Oztop, Erhan
Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots Journal Article
In: Frontiers in Neurorobotics, vol. 12, pp. 71, 2018, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Teramae2018,
title = {Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots},
author = {Tatsuya Teramae and Koji Ishihara and Jan Babi\v{c} and Jun Morimoto and Erhan Oztop},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2018.00071/full},
doi = {10.3389/fnbot.2018.00071},
issn = {1662-5218},
year = {2018},
date = {2018-11-01},
journal = {Frontiers in Neurorobotics},
volume = {12},
pages = {71},
publisher = {Frontiers},
abstract = {Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.
Peternel, Luka; Petrič, Tadej; Babič, Jan
Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation Journal Article
In: Autonomous Robots, vol. 42, no. 1, pp. 1–17, 2018, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Force Control, Human-in-the-Loop Control | Links:
@article{Peternel2018,
title = {Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-017-9635-z},
doi = {10.1007/s10514-017-9635-z},
issn = {0929-5593},
year = {2018},
date = {2018-01-01},
journal = {Autonomous Robots},
volume = {42},
number = {1},
pages = {1--17},
publisher = {Springer US},
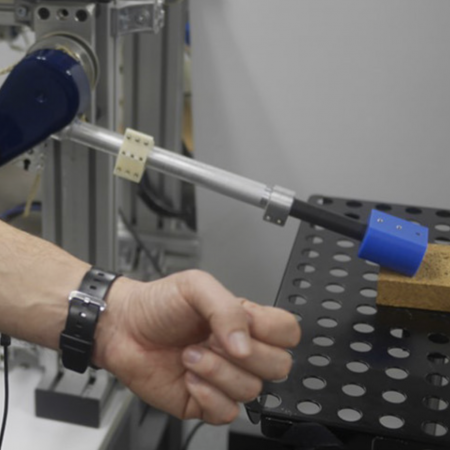
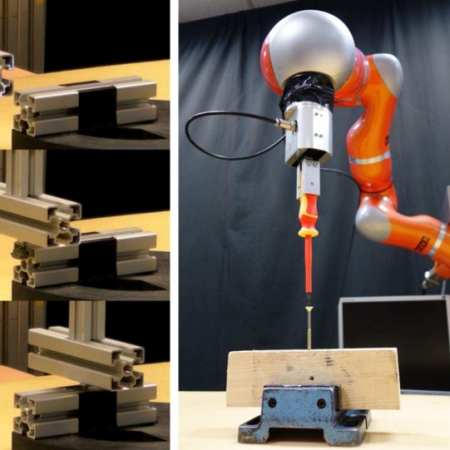
abstract = {We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.},
keywords = {Compliance and Impedance Control, Force Control, Human-in-the-Loop Control},
pubstate = {published},
tppubtype = {article}
}
We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.
2016
Peternel, Luka; Oztop, Erhan; Babič, Jan
A shared control method for online human-in-the-loop robot learning based on Locally Weighted Regression Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3900–3906, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Peternel2016,
title = {A shared control method for online human-in-the-loop robot learning based on Locally Weighted Regression},
author = {Luka Peternel and Erhan Oztop and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759574/},
doi = {10.1109/IROS.2016.7759574},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-01-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {3900--3906},
publisher = {IEEE},
address = {Daejeon},
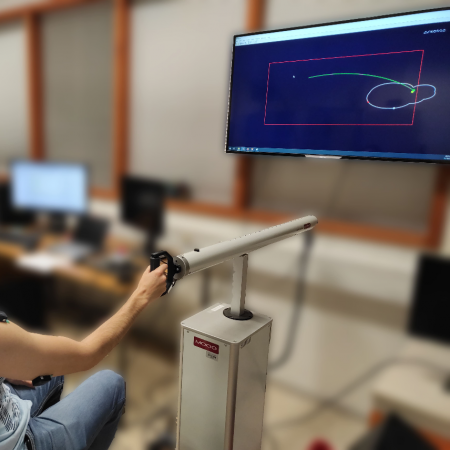
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.
2015

Peternel, Luka; Petrič, Tadej; Babič, Jan
Human-in-the-loop approach for teaching robot assembly tasks using impedance control interface Proceedings Article
In: 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 1497–1502, IEEE, Seattle, 2015, ISSN: 10504729.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Peternel2015a,
title = {Human-in-the-loop approach for teaching robot assembly tasks using impedance control interface},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7139387/},
doi = {10.1109/ICRA.2015.7139387},
issn = {10504729},
year = {2015},
date = {2015-01-01},
booktitle = {2015 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1497--1502},
publisher = {IEEE},
address = {Seattle},
abstract = {In this paper we propose a human-in-the-loop approach for teaching robots how to solve part assembly tasks. In the proposed setup the human tutor controls the robot through a haptic interface and a hand-held impedance control interface. The impedance control interface is based on a linear spring-return potentiometer that maps the button position to the robot arm stiffness. This setup allows the tutor to modulate the robot compliance based on the given task requirements. The demonstrated motion and stiffness trajectories are encoded using Dynamical Movement Primitives and learnt using Locally Weight Regression. To validate the proposed approach we performed experiments using Kuka Light Weight Robot and HapticMaster robot. The task of the experiment was to teach the robot how to perform an assembly task involving sliding a bolt fitting inside a groove in order to mount two parts together. Different stiffness was required in different stages of the task execution to accommodate the interaction of the robot with the environment and possible human-robot cooperation.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a human-in-the-loop approach for teaching robots how to solve part assembly tasks. In the proposed setup the human tutor controls the robot through a haptic interface and a hand-held impedance control interface. The impedance control interface is based on a linear spring-return potentiometer that maps the button position to the robot arm stiffness. This setup allows the tutor to modulate the robot compliance based on the given task requirements. The demonstrated motion and stiffness trajectories are encoded using Dynamical Movement Primitives and learnt using Locally Weight Regression. To validate the proposed approach we performed experiments using Kuka Light Weight Robot and HapticMaster robot. The task of the experiment was to teach the robot how to perform an assembly task involving sliding a bolt fitting inside a groove in order to mount two parts together. Different stiffness was required in different stages of the task execution to accommodate the interaction of the robot with the environment and possible human-robot cooperation.
2014
Peternel, Luka; Babič, Jan
Switchable task-priority framework for combining human-demonstrated and inverse kinematics tasks Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 542–547, IEEE, Bali, 2014, ISBN: 978-1-4799-7397-2.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Peternel2014a,
title = {Switchable task-priority framework for combining human-demonstrated and inverse kinematics tasks},
author = {Luka Peternel and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/7090387/},
doi = {10.1109/ROBIO.2014.7090387},
isbn = {978-1-4799-7397-2},
year = {2014},
date = {2014-12-01},
booktitle = {2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014)},
pages = {542--547},
publisher = {IEEE},
address = {Bali},
abstract = {We propose an approach that combines human demonstrated posture-control skill defined by the motion in the lower limb joints with an inverse kinematics solution of an arbitrary hand motion. The posture-control skill for humanoid robot was obtained through the human-in-the-loop teaching approach. The collected data during the teaching phase was used to approximate functional relation between the state of the robot's centre-of-pressure and the appropriate motion in the joints of the leg. The motion of the robot's hand was prescribed using the inverse kinematic solution. The posture-control skill and the motion of the hand were combined together using the task priority resolution strategy. We tested our approach with an experiment where the humanoid robot had to spin a spindle device with the hand and simultaneously maintain balance in the presence of external perturbations. In addition, we propose an upgrade that allows switching of control over the leg joints between arm task and posture-control task.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose an approach that combines human demonstrated posture-control skill defined by the motion in the lower limb joints with an inverse kinematics solution of an arbitrary hand motion. The posture-control skill for humanoid robot was obtained through the human-in-the-loop teaching approach. The collected data during the teaching phase was used to approximate functional relation between the state of the robot's centre-of-pressure and the appropriate motion in the joints of the leg. The motion of the robot's hand was prescribed using the inverse kinematic solution. The posture-control skill and the motion of the hand were combined together using the task priority resolution strategy. We tested our approach with an experiment where the humanoid robot had to spin a spindle device with the hand and simultaneously maintain balance in the presence of external perturbations. In addition, we propose an upgrade that allows switching of control over the leg joints between arm task and posture-control task.

Peternel, Luka; Petrič, Tadej; Oztop, Erhan; Babič, Jan
Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach Journal Article
In: Autonomous Robots, vol. 36, no. 1-2, pp. 123–136, 2014, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@article{Peternel2014b,
title = {Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach},
author = {Luka Peternel and Tadej Petri\v{c} and Erhan Oztop and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-013-9361-0},
doi = {10.1007/s10514-013-9361-0},
issn = {0929-5593},
year = {2014},
date = {2014-01-01},
journal = {Autonomous Robots},
volume = {36},
number = {1-2},
pages = {123--136},
abstract = {We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.
Gams, Andrej; Petrič, Tadej; Nemec, Bojan; Ude, Aleš
Learning and adaptation of periodic motion primitives based on force feedback and human coaching interaction Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 166–171, IEEE, Madrid, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Force Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Gams2014,
title = {Learning and adaptation of periodic motion primitives based on force feedback and human coaching interaction},
author = {Andrej Gams and Tadej Petri\v{c} and Bojan Nemec and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=7041354},
doi = {10.1109/HUMANOIDS.2014.7041354},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-01-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {166--171},
publisher = {IEEE},
address = {Madrid},
abstract = {Dynamic movement primitives (DMP) allow efficient learning and control of complex robot behaviors for both periodic and discrete point-to-point movements either in joint or Cartesian space. They also allow efficient modulation by changing of parameters. In this paper we introduce and evaluate the means of adapting periodic DMP trajectories with respect to force feedback. We simultaneously consider two aspects: 1) adaptation of whole trajectories to comply with the constraints set by the environment; and 2) partially modifying the trajectories during the execution based on human intervention to improve the task performance. The latter can either be force-based, i. e. through physical contact, or through predefined gestures. By intervening when necessary the human acts as a tutor, instructing the robot how to modify the trajectory and bypassing the need to learn new trajectories by autonomous exploration. We introduce the approach in the context of wiping a surface, where the robot first has to acquire and maintain contact, and where later the human tutor modifies the originally learned trajectory in order to achieve the desired robot behavior. We present simulation and real world results of wiping a surface with a Kuka 7 degree-of-freedom LWR robot.},
keywords = {Force Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Dynamic movement primitives (DMP) allow efficient learning and control of complex robot behaviors for both periodic and discrete point-to-point movements either in joint or Cartesian space. They also allow efficient modulation by changing of parameters. In this paper we introduce and evaluate the means of adapting periodic DMP trajectories with respect to force feedback. We simultaneously consider two aspects: 1) adaptation of whole trajectories to comply with the constraints set by the environment; and 2) partially modifying the trajectories during the execution based on human intervention to improve the task performance. The latter can either be force-based, i. e. through physical contact, or through predefined gestures. By intervening when necessary the human acts as a tutor, instructing the robot how to modify the trajectory and bypassing the need to learn new trajectories by autonomous exploration. We introduce the approach in the context of wiping a surface, where the robot first has to acquire and maintain contact, and where later the human tutor modifies the originally learned trajectory in order to achieve the desired robot behavior. We present simulation and real world results of wiping a surface with a Kuka 7 degree-of-freedom LWR robot.
Petrič, Tadej; Gams, Andrej; Žlajpah, Leon; Ude, Aleš; Morimoto, Jun
Online approach for altering robot behaviors based on human in the loop coaching gestures Proceedings Article
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 4770–4776, IEEE, Hong Kong, 2014, ISSN: 10504729.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Optimal Control | Links:
@inproceedings{Petric2014a,
title = {Online approach for altering robot behaviors based on human in the loop coaching gestures},
author = {Tadej Petri\v{c} and Andrej Gams and Leon \v{Z}lajpah and Ale\v{s} Ude and Jun Morimoto},
url = {http://ieeexplore.ieee.org/document/6907557/},
doi = {10.1109/ICRA.2014.6907557},
issn = {10504729},
year = {2014},
date = {2014-01-01},
booktitle = {2014 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {4770--4776},
publisher = {IEEE},
address = {Hong Kong},
abstract = {The creation and adaptation of motor behaviors is an important capability for autonomous robots. In this paper we propose an approach for altering existing robot behaviors online, where a human coach interactively changes the robot motion to achieve the desired outcome. Using hand gestures, the human coach can specify the desired modifications to the previously acquired behavior. To preserve a natural posture while performing the task, the movement is encoded in the robot's joint space using periodic dynamic movement primitives. The coaching gestures are mapped to the robot joint space via robot Jacobian and used to create a virtual force field affecting the movement. A recursive least squares technique is used to modify the existing movement with respect to the virtual force field. The proposed approach was evaluated on a simulated three degrees of freedom planar robot and on a real humanoid robot, where human coaching gestures were captured by an RGB-D sensor. Although our focus was on rhythmic movements, the developed approach is also applicable to discrete (point-to-point) movements.},
keywords = {Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
The creation and adaptation of motor behaviors is an important capability for autonomous robots. In this paper we propose an approach for altering existing robot behaviors online, where a human coach interactively changes the robot motion to achieve the desired outcome. Using hand gestures, the human coach can specify the desired modifications to the previously acquired behavior. To preserve a natural posture while performing the task, the movement is encoded in the robot's joint space using periodic dynamic movement primitives. The coaching gestures are mapped to the robot joint space via robot Jacobian and used to create a virtual force field affecting the movement. A recursive least squares technique is used to modify the existing movement with respect to the virtual force field. The proposed approach was evaluated on a simulated three degrees of freedom planar robot and on a real humanoid robot, where human coaching gestures were captured by an RGB-D sensor. Although our focus was on rhythmic movements, the developed approach is also applicable to discrete (point-to-point) movements.
2013
Peternel, Luka; Babič, Jan
Learning of compliant human–robot interaction using full-body haptic interface Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 1003–1012, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Peternel2013b,
title = {Learning of compliant human\textendashrobot interaction using full-body haptic interface},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.808305},
doi = {10.1080/01691864.2013.808305},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {1003--1012},
publisher = {Taylor \& Francis},
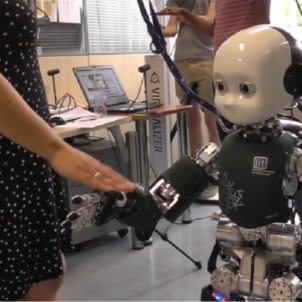
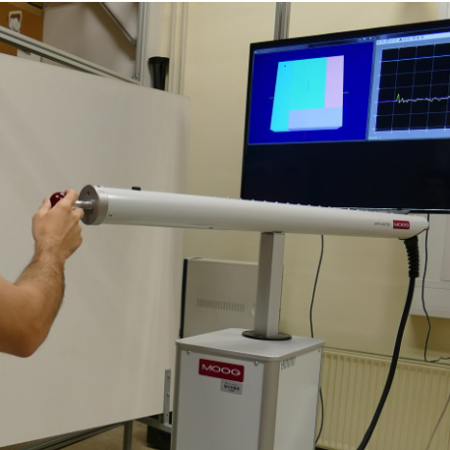
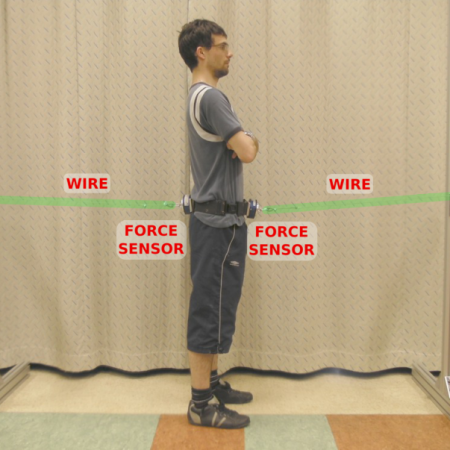
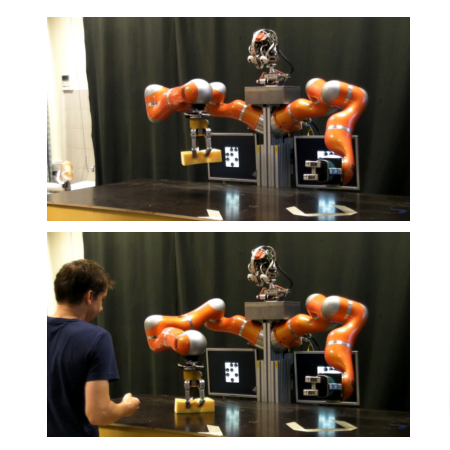
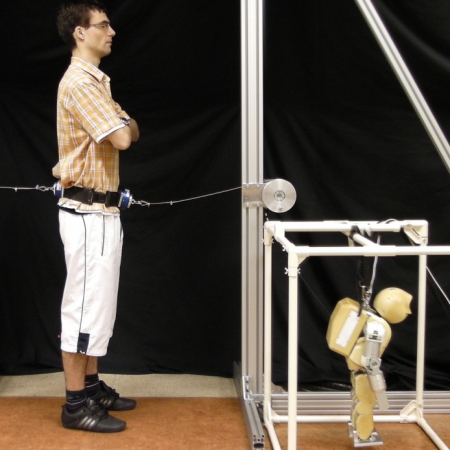
abstract = {We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.
Petrič, Tadej; Gams, Andrej; Babič, Jan; Žlajpah, Leon
Reflexive stability control framework for humanoid robots Journal Article
In: Autonomous Robots, vol. 34, no. 4, pp. 347–361, 2013, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Postural Balance | Links:
@article{Petric2013,
title = {Reflexive stability control framework for humanoid robots},
author = {Tadej Petri\v{c} and Andrej Gams and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {http://link.springer.com/10.1007/s10514-013-9329-0},
doi = {10.1007/s10514-013-9329-0},
issn = {0929-5593},
year = {2013},
date = {2013-01-01},
journal = {Autonomous Robots},
volume = {34},
number = {4},
pages = {347--361},
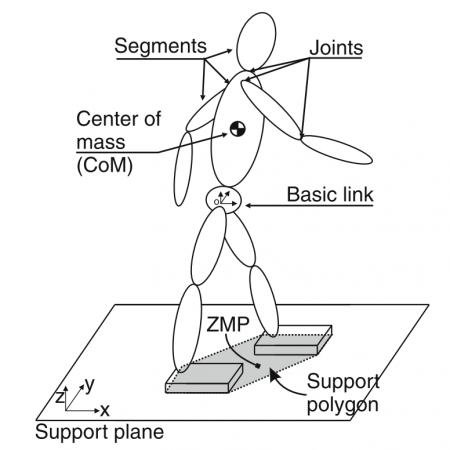
abstract = {In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.
Peternel, Luka; Babič, Jan
Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability Proceedings Article
In: 2013 IEEE International Conference on Robotics and Automation, pp. 5329–5334, IEEE, Karlsruhe, 2013, ISBN: 978-1-4673-5643-5.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning | Links:
@inproceedings{Peternel2013a,
title = {Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6631340/},
doi = {10.1109/ICRA.2013.6631340},
isbn = {978-1-4673-5643-5},
year = {2013},
date = {2013-01-01},
booktitle = {2013 IEEE International Conference on Robotics and Automation},
pages = {5329--5334},
publisher = {IEEE},
address = {Karlsruhe},
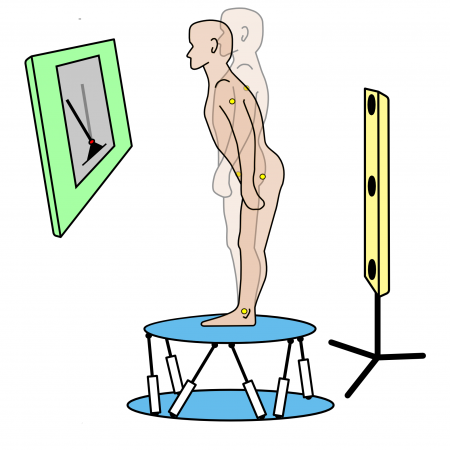
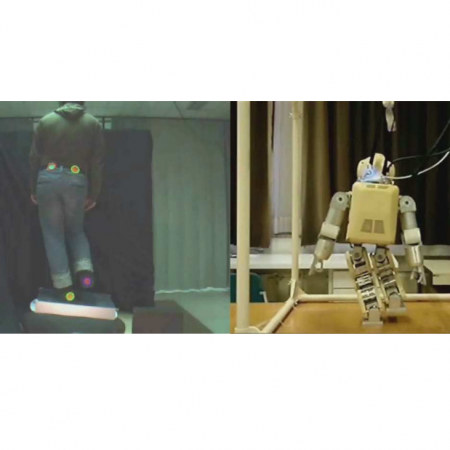
abstract = {In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.},
keywords = {Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.

Petrič, Tadej; Žlajpah, Leon
Smooth continuous transition between tasks on a kinematic control level: Obstacle avoidance as a control problem Journal Article
In: Robotics and Autonomous Systems, vol. 61, no. 9, pp. 948–959, 2013, ISSN: 09218890.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Optimal Control | Links:
@article{Petric2013c,
title = {Smooth continuous transition between tasks on a kinematic control level: Obstacle avoidance as a control problem},
author = {Tadej Petri\v{c} and Leon \v{Z}lajpah},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889013000833},
doi = {10.1016/j.robot.2013.04.019},
issn = {09218890},
year = {2013},
date = {2013-01-01},
journal = {Robotics and Autonomous Systems},
volume = {61},
number = {9},
pages = {948--959},
publisher = {Elsevier B.V.},
abstract = {Kinematically redundant robots allow simultaneous execution of several tasks with different priorities. Beside the main task, obstacle avoidance is one commonly used subtask. The ability to avoid obstacles is especially important when the robot is working in a human environment. In this paper, we propose a novel control method for kinematically redundant robots, where we focus on a smooth, continuous transition between different tasks. The method is based on a new and very simple null-space formulation. Sufficient conditions for the tasks design are given using the Lyapunov-based stability discussion. The effectiveness of the proposed control method is demonstrated by simulation and on a real robot. Pros and cons of the proposed method and the comparison with other control methods are also discussed.},
keywords = {Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Kinematically redundant robots allow simultaneous execution of several tasks with different priorities. Beside the main task, obstacle avoidance is one commonly used subtask. The ability to avoid obstacles is especially important when the robot is working in a human environment. In this paper, we propose a novel control method for kinematically redundant robots, where we focus on a smooth, continuous transition between different tasks. The method is based on a new and very simple null-space formulation. Sufficient conditions for the tasks design are given using the Lyapunov-based stability discussion. The effectiveness of the proposed control method is demonstrated by simulation and on a real robot. Pros and cons of the proposed method and the comparison with other control methods are also discussed.
2011
Babič, Jan; Hale, Joshua; Oztop, Erhan
Human sensorimotor learning for humanoid robot skill synthesis Journal Article
In: Adaptive Behavior, vol. 19, no. 4, pp. 250–263, 2011, ISSN: 1059-7123.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Babic2011b,
title = {Human sensorimotor learning for humanoid robot skill synthesis},
author = {Jan Babi\v{c} and Joshua Hale and Erhan Oztop},
url = {http://journals.sagepub.com/doi/10.1177/1059712311411112},
doi = {10.1177/1059712311411112},
issn = {1059-7123},
year = {2011},
date = {2011-01-01},
journal = {Adaptive Behavior},
volume = {19},
number = {4},
pages = {250--263},
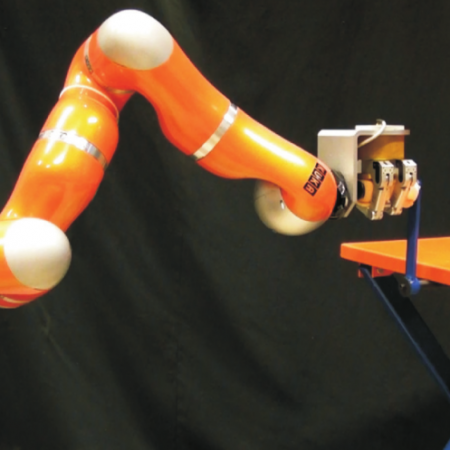
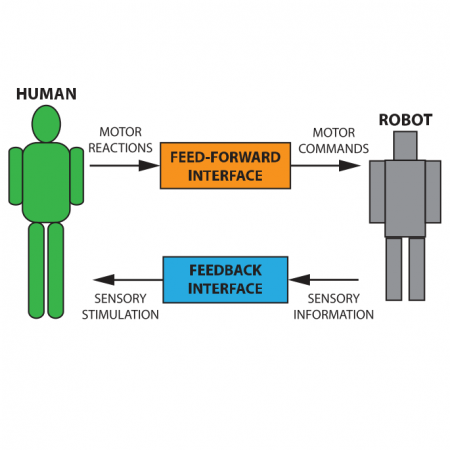
abstract = {Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.
2010
Babič, Jan; Hajdinjak, Blaž; Oztop, Erhan
Robot Skill Synthesis Through Human Visuo-Motor Learning - Humanoid Robot Statically-stable Reaching and In-place Stepping Proceedings Article
In: Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pp. 212–215, SciTePress - Science and and Technology Publications, Funchal, 2010, ISBN: 978-989-8425-00-3.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Babic2010,
title = {Robot Skill Synthesis Through Human Visuo-Motor Learning - Humanoid Robot Statically-stable Reaching and In-place Stepping},
author = {Jan Babi\v{c} and Bla\v{z} Hajdinjak and Erhan Oztop},
url = {http://www.scitepress.org/DigitalLibrary/Link.aspx?doi=10.5220/0002937502120215},
doi = {10.5220/0002937502120215},
isbn = {978-989-8425-00-3},
year = {2010},
date = {2010-01-01},
booktitle = {Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics},
volume = {2},
pages = {212--215},
publisher = {SciTePress - Science and and Technology Publications},
address = {Funchal},
abstract = {To achieve a desirable motion of the humanoid robots we propose a framework for robot skill-synthesis that is based on human visuo-motor learning capacity. The basic idea is to consider the humanoid robot as a tool that is intuitively controlled by a human demonstrator. Once the effortless control of the humanoid robot has been achieved, the desired behavior of the humanoid robot is obtained through practice. The successful execution of the desired motion by the human demonstrator is afterwards used for the design of motion controllers that operate autonomously. In the paper we describe our idea by presenting a couple of robot skills obtained by the proposed framework.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
To achieve a desirable motion of the humanoid robots we propose a framework for robot skill-synthesis that is based on human visuo-motor learning capacity. The basic idea is to consider the humanoid robot as a tool that is intuitively controlled by a human demonstrator. Once the effortless control of the humanoid robot has been achieved, the desired behavior of the humanoid robot is obtained through practice. The successful execution of the desired motion by the human demonstrator is afterwards used for the design of motion controllers that operate autonomously. In the paper we describe our idea by presenting a couple of robot skills obtained by the proposed framework.
2009
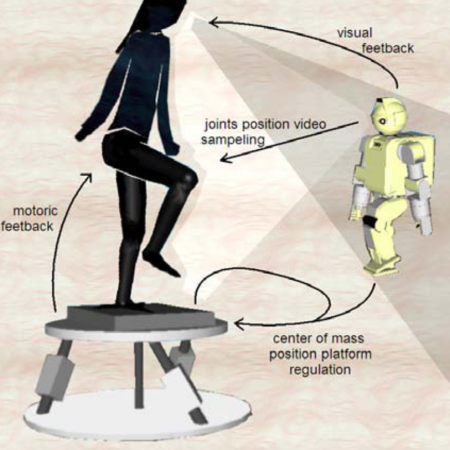
Hajdinjak, Blaž; Babič, Jan; Oztop, Erhan
Improving balance regulation in visuo-motor control for humanoid robots Proceedings Article
In: 2009 24th International Symposium on Computer and Information Sciences, pp. 405–408, IEEE, Guzelyut, 2009, ISBN: 978-1-4244-5021-3.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Hajdinjak2009,
title = {Improving balance regulation in visuo-motor control for humanoid robots},
author = {Bla\v{z} Hajdinjak and Jan Babi\v{c} and Erhan Oztop},
url = {http://ieeexplore.ieee.org/document/5291801/},
doi = {10.1109/ISCIS.2009.5291801},
isbn = {978-1-4244-5021-3},
year = {2009},
date = {2009-01-01},
booktitle = {2009 24th International Symposium on Computer and Information Sciences},
pages = {405--408},
publisher = {IEEE},
address = {Guzelyut},
abstract = {We know various strategies toward teaching and controlling humanoid robots. Some refer to direct joint or tip control and others use more intuitive approach such as mimicking human motion in a certain task. This kind of robot control, where a robot is considered a tool, controlled by a human demonstrator, is called visuo-motion control. In this paper, we present an improved approach to overcome a problem of balance in visuo-motor control of humanoid robots.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We know various strategies toward teaching and controlling humanoid robots. Some refer to direct joint or tip control and others use more intuitive approach such as mimicking human motion in a certain task. This kind of robot control, where a robot is considered a tool, controlled by a human demonstrator, is called visuo-motion control. In this paper, we present an improved approach to overcome a problem of balance in visuo-motor control of humanoid robots.
2008
Oztop, Erhan; Babič, Jan; Hale, Joshua; Cheng, Gordon; Kawato, Mitsuo
From Biologically Realistic Imitation to Robot Teaching Via Human Motor Learning Book Section
In: Ishikawa, Masumi; Doya, Kenji; Miyamoto, Hiroyuki; Yamakawa, Takeshi (Ed.): Neural Information Processing, vol. 4985, pp. 214–221, Springer, Berlin, 2008, ISSN: 0302-9743.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@incollection{Oztop2008,
title = {From Biologically Realistic Imitation to Robot Teaching Via Human Motor Learning},
author = {Erhan Oztop and Jan Babi\v{c} and Joshua Hale and Gordon Cheng and Mitsuo Kawato},
editor = {Masumi Ishikawa and Kenji Doya and Hiroyuki Miyamoto and Takeshi Yamakawa},
url = {http://link.springer.com/10.1007/978-3-540-69162-4_23},
doi = {10.1007/978-3-540-69162-4_23},
issn = {0302-9743},
year = {2008},
date = {2008-01-01},
booktitle = {Neural Information Processing},
volume = {4985},
pages = {214--221},
publisher = {Springer},
address = {Berlin},
series = {Lecture Notes in Computer Science},
abstract = {Understanding mechanisms of imitation is a complex task in both human sciences and robotics. On the one hand, one can build systems that analyze observed motion, map it to their own body, and produce the motor commands to needed to achieve the inferred motion using engineering techniques. On the other hand, one can model the neural circuits involved in action observation and production in minute detail and hope that imitation will be an emergent property of the system. However if the goal is to build robots capable of skillful actions, midway solutions appear to be more appropriate. In this direction, we first introduce a conceptually biologically realistic neural network that can learn to imitate hand postures, either with the help of a teacher or by self-observation. Then we move to a paradigm we have recently proposed, where robot skill synthesis is achieved by exploiting the human capacity to learn novel control tasks.},
keywords = {Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
Understanding mechanisms of imitation is a complex task in both human sciences and robotics. On the one hand, one can build systems that analyze observed motion, map it to their own body, and produce the motor commands to needed to achieve the inferred motion using engineering techniques. On the other hand, one can model the neural circuits involved in action observation and production in minute detail and hope that imitation will be an emergent property of the system. However if the goal is to build robots capable of skillful actions, midway solutions appear to be more appropriate. In this direction, we first introduce a conceptually biologically realistic neural network that can learn to imitate hand postures, either with the help of a teacher or by self-observation. Then we move to a paradigm we have recently proposed, where robot skill synthesis is achieved by exploiting the human capacity to learn novel control tasks.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si