




2025
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Jarrassé, Nathanaël
JcvPCA and JsvCRP: A set of metrics to evaluate changes in joint coordination strategies Journal Article
In: PLOS ONE, vol. 20, no. 8, pp. 1-22, 2025.
Abstract | BibTeX | Tags: Kinematics | Links:
@article{dubois2025JcvPCA,
title = {JcvPCA and JsvCRP: A set of metrics to evaluate changes in joint coordination strategies},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Nathana\"{e}l Jarrass\'{e}},
url = {https://doi.org/10.1371/journal.pone.0325792},
doi = {10.1371/journal.pone.0325792},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {PLOS ONE},
volume = {20},
number = {8},
pages = {1-22},
publisher = {Public Library of Science},
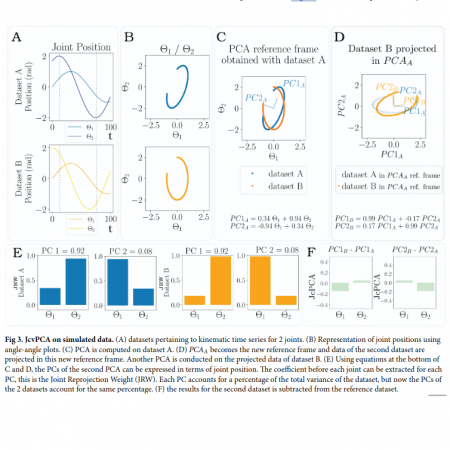
abstract = {Characterizing changes in inter-joint coordination presents significant challenges, as it necessitates the examination of relationships between multiple degrees of freedom during movements and their temporal evolution. Existing metrics are inadequate in providing physiologically coherent results that document both the temporal and spatial aspects of inter-joint coordination. In this article, we introduce two novel metrics to enhance the analysis of inter-joint coordination. The first metric, Joint Contribution Variation based on Principal Component Analysis (JcvPCA), evaluates the variation in each joint’s contribution during series of movements. The second metric, Joint Synchronization Variation based on Continuous Relative Phase (JsvCRP), measures the variation in temporal synchronization among joints between two movement datasets. We begin by presenting each metric and explaining their derivation. We then demonstrate the application of these metrics using simulated and experimental datasets involving identical movement tasks performed with distinct coordination strategies. The results show that these metrics can successfully differentiate between unique coordination strategies, providing meaningful insights into joint collaboration during movement. These metrics hold significant potential for fields such as ergonomics and clinical rehabilitation, where a precise understanding of the evolution of inter-joint coordination strategies is crucial. Potential applications include evaluating the effects of upper limb exoskeletons in industrial settings or monitoring the progress of patients undergoing neurological rehabilitation.},
keywords = {Kinematics},
pubstate = {published},
tppubtype = {article}
}
Characterizing changes in inter-joint coordination presents significant challenges, as it necessitates the examination of relationships between multiple degrees of freedom during movements and their temporal evolution. Existing metrics are inadequate in providing physiologically coherent results that document both the temporal and spatial aspects of inter-joint coordination. In this article, we introduce two novel metrics to enhance the analysis of inter-joint coordination. The first metric, Joint Contribution Variation based on Principal Component Analysis (JcvPCA), evaluates the variation in each joint’s contribution during series of movements. The second metric, Joint Synchronization Variation based on Continuous Relative Phase (JsvCRP), measures the variation in temporal synchronization among joints between two movement datasets. We begin by presenting each metric and explaining their derivation. We then demonstrate the application of these metrics using simulated and experimental datasets involving identical movement tasks performed with distinct coordination strategies. The results show that these metrics can successfully differentiate between unique coordination strategies, providing meaningful insights into joint collaboration during movement. These metrics hold significant potential for fields such as ergonomics and clinical rehabilitation, where a precise understanding of the evolution of inter-joint coordination strategies is crucial. Potential applications include evaluating the effects of upper limb exoskeletons in industrial settings or monitoring the progress of patients undergoing neurological rehabilitation.
2024

Jamšek, Marko; Sajko, Gal; Krpan, Jurij; Babič, Jan
Design and Control of a Climbing Robot for Autonomous Vertical Gardening Journal Article
In: Machines, vol. 12, iss. 2, pp. 141, 2024, ISSN: 2075-1702.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Robot Design | Links:
@article{nokey,
title = {Design and Control of a Climbing Robot for Autonomous Vertical Gardening},
author = {Marko Jam\v{s}ek and Gal Sajko and Jurij Krpan and Jan Babi\v{c}},
doi = {10.3390/machines12020141},
issn = {2075-1702},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Machines},
volume = {12},
issue = {2},
pages = {141},
abstract = {This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.},
keywords = {Compliance and Impedance Control, Kinematics, Robot Design},
pubstate = {published},
tppubtype = {article}
}
This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Jarrassé, Nathanaël
Short term after-effects of small force fields applied by an upper-limb exoskeleton on inter-joint coordination Journal Article
In: IEEE International Conference on Robotics and Automation, pp. 959-965, 2024.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Physical Human Robot Interaction | Links:
@article{dubois2024Short,
title = {Short term after-effects of small force fields applied by an upper-limb exoskeleton on inter-joint coordination},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Nathana\"{e}l Jarrass\'{e}},
doi = {10.1109/ICRA57147.2024.10610645},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {IEEE International Conference on Robotics and Automation},
pages = {959-965},
abstract = {Exoskeleton technologies have numerous potential applications, ranging from improving human motor skills to aiding individuals in their daily activities. While exoskeletons are increasingly viewed, for example, as promising tools in industrial ergonomics, the effect of using them on human motor control, particularly on inter-joint coordination, remains relatively uncharted. This paper investigates the effects of generic low-amplitude force fields applied by an exoskeleton on motor strategies in asymptomatic users. The force fields mimic common perturbations encountered in exoskeletons, such as residual friction, over/under-tuned assistance, or structural elasticity. Fifty-five participants performed reaching tasks while connected to an arm exoskeleton, experiencing one of five tested force fields. Their movements before and after exposure to the exoskeleton force field were compared. The study focuses both on spatial and temporal changes in coordination using specific metrics. The results reveal that even brief exposure to a low- amplitude force field, or to uncompensated residual friction and dynamic forces, applied at the joint level can alter the interjoint coordination, while task performance remains unaffected. The tested force fields induced varying degrees of changes in joint contributions and synchronization. This study highlights the importance of monitoring coordination changes to fully understand the impact of exoskeletons on human motor control and thus enable safe and widespread adoption of those devices.},
keywords = {Human Motor Control, Kinematics, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Exoskeleton technologies have numerous potential applications, ranging from improving human motor skills to aiding individuals in their daily activities. While exoskeletons are increasingly viewed, for example, as promising tools in industrial ergonomics, the effect of using them on human motor control, particularly on inter-joint coordination, remains relatively uncharted. This paper investigates the effects of generic low-amplitude force fields applied by an exoskeleton on motor strategies in asymptomatic users. The force fields mimic common perturbations encountered in exoskeletons, such as residual friction, over/under-tuned assistance, or structural elasticity. Fifty-five participants performed reaching tasks while connected to an arm exoskeleton, experiencing one of five tested force fields. Their movements before and after exposure to the exoskeleton force field were compared. The study focuses both on spatial and temporal changes in coordination using specific metrics. The results reveal that even brief exposure to a low- amplitude force field, or to uncompensated residual friction and dynamic forces, applied at the joint level can alter the interjoint coordination, while task performance remains unaffected. The tested force fields induced varying degrees of changes in joint contributions and synchronization. This study highlights the importance of monitoring coordination changes to fully understand the impact of exoskeletons on human motor control and thus enable safe and widespread adoption of those devices.
2023
Segas, Effie; Mick, Sébastien; Leconte, Vincent; Dubois, Océane; Klotz, Rémi; Cattaert, Daniel; Rugy, Aymar
Intuitive movement-based prosthesis control enables arm amputees to reach naturally in virtual reality Journal Article
In: eLife, vol. 12, pp. RP87317, 2023, ISSN: 2050-084X.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Kinematics, Machine Learning | Links:
@article{segas2023intuitive,
title = {Intuitive movement-based prosthesis control enables arm amputees to reach naturally in virtual reality},
author = {Effie Segas and S\'{e}bastien Mick and Vincent Leconte and Oc\'{e}ane Dubois and R\'{e}mi Klotz and Daniel Cattaert and Aymar Rugy},
editor = {Kianoush Nazarpour and Tamar R Makin},
url = {https://doi.org/10.7554/eLife.87317},
doi = {10.7554/eLife.87317},
issn = {2050-084X},
year = {2023},
date = {2023-10-01},
urldate = {2023-10-01},
journal = {eLife},
volume = {12},
pages = {RP87317},
publisher = {eLife Sciences Publications, Ltd},
abstract = {Impressive progress is being made in bionic limbs design and control. Yet, controlling the numerous joints of a prosthetic arm necessary to place the hand at a correct position and orientation to grasp objects remains challenging. Here, we designed an intuitive, movement-based prosthesis control that leverages natural arm coordination to predict distal joints missing in people with transhumeral limb loss based on proximal residual limb motion and knowledge of the movement goal. This control was validated on 29 participants, including seven with above-elbow limb loss, who picked and placed bottles in a wide range of locations in virtual reality, with median success rates over 99% and movement times identical to those of natural movements. This control also enabled 15 participants, including three with limb differences, to reach and grasp real objects with a robotic arm operated according to the same principle. Remarkably, this was achieved without any prior training, indicating that this control is intuitive and instantaneously usable. It could be used for phantom limb pain management in virtual reality, or to augment the reaching capabilities of invasive neural interfaces usually more focused on hand and grasp control.},
keywords = {Human-in-the-Loop Control, Kinematics, Machine Learning},
pubstate = {published},
tppubtype = {article}
}
Impressive progress is being made in bionic limbs design and control. Yet, controlling the numerous joints of a prosthetic arm necessary to place the hand at a correct position and orientation to grasp objects remains challenging. Here, we designed an intuitive, movement-based prosthesis control that leverages natural arm coordination to predict distal joints missing in people with transhumeral limb loss based on proximal residual limb motion and knowledge of the movement goal. This control was validated on 29 participants, including seven with above-elbow limb loss, who picked and placed bottles in a wide range of locations in virtual reality, with median success rates over 99% and movement times identical to those of natural movements. This control also enabled 15 participants, including three with limb differences, to reach and grasp real objects with a robotic arm operated according to the same principle. Remarkably, this was achieved without any prior training, indicating that this control is intuitive and instantaneously usable. It could be used for phantom limb pain management in virtual reality, or to augment the reaching capabilities of invasive neural interfaces usually more focused on hand and grasp control.
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Khoramshahi, Mahdi; Jarrassé, Nathanaël
A guide to inter-joint coordination characterization for discrete movements: a comparative study Journal Article
In: Journal of NeuroEngineering and Rehabilitation, vol. 20, no. 1, pp. 132, 2023, ISSN: 1743-0003.
Abstract | BibTeX | Tags: Dynamic Motion, Kinematics | Links:
@article{dubois2023Guide,
title = {A guide to inter-joint coordination characterization for discrete movements: a comparative study},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Mahdi Khoramshahi and Nathana\"{e}l Jarrass\'{e}},
url = {https://doi.org/10.1186/s12984-023-01252-2},
doi = {10.1186/s12984-023-01252-2},
issn = {1743-0003},
year = {2023},
date = {2023-09-30},
urldate = {2023-09-30},
journal = {Journal of NeuroEngineering and Rehabilitation},
volume = {20},
number = {1},
pages = {132},
abstract = {Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results.},
keywords = {Dynamic Motion, Kinematics},
pubstate = {published},
tppubtype = {article}
}
Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results.
2022
Eiken, Ola; Mekjavić, Igor B.; Babič, Jan; Danielsson, Ulf; Hallberg, Magnus; Kounalakis, Stylianos N.
Effects of vision on energy expenditure and kinematics during level walking Journal Article
In: European Journal of Applied Physiology, vol. 122, no. 5, pp. 1231–1237, 2022, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Kinematics, Postural Balance | Links:
@article{Eiken2022,
title = {Effects of vision on energy expenditure and kinematics during level walking},
author = {Ola Eiken and Igor B. Mekjavi\'{c} and Jan Babi\v{c} and Ulf Danielsson and Magnus Hallberg and Stylianos N. Kounalakis},
url = {https://link.springer.com/10.1007/s00421-022-04914-6},
doi = {10.1007/s00421-022-04914-6},
issn = {1439-6319},
year = {2022},
date = {2022-05-01},
urldate = {2022-05-01},
journal = {European Journal of Applied Physiology},
volume = {122},
number = {5},
pages = {1231--1237},
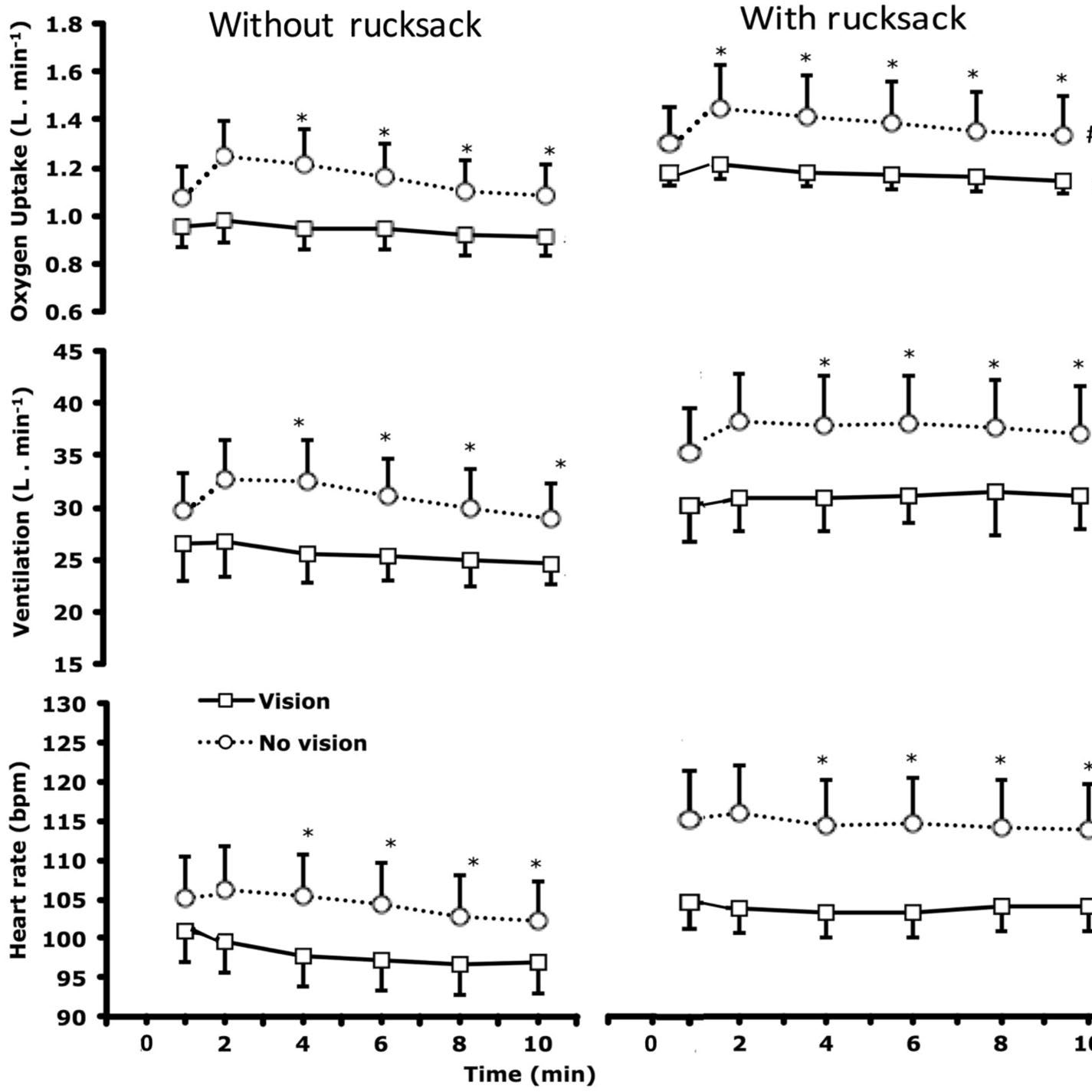
abstract = {Purpose We have previously observed substantially higher oxygen uptake in soldiers walking on terrain at night than when performing the same walk in bright daylight. The aims of the present study were to investigate the influence of vision on mechanical efficiency during slow, horizontal, constant-speed walking, and to determine whether any vision influence is modified by load carriage. Methods Each subject (n = 15) walked (3.3 km/h) for 10 min on a treadmill in four different conditions: (1) full vision, no carried load, (2) no vision, no carried load, (3) full vision with a 25.5-kg rucksack, (4) no vision with a 25.5-kg rucksack. Results Oxygen uptake was 0.94 ± 0.12 l/min in condition (1), 1.15 ± 0.20 l/min in (2), 1.15 ± 0.12 l/min in (3) and 1.35 ± 0.19 l/min in (4). Thus, lack of vision increased oxygen uptake by about 19%. Analyses of movement pattern, by use of optical markers attached to the limbs and torso, revealed considerably shorter step length (12 and 10%) in the no vision (2 and 4) than full vision conditions (1 and 3). No vision conditions (2 and 4) increased step width by 6 and 6%, and increased vertical foot clearance by 20 and 16% compared to full vision conditions (1 and 3). Conclusion The results suggest that vision has a marked influence on mechanical efficiency even during entrained, repetitive movements performed on an obstacle-free horizontal surface under highly predictable conditions.},
keywords = {Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Purpose We have previously observed substantially higher oxygen uptake in soldiers walking on terrain at night than when performing the same walk in bright daylight. The aims of the present study were to investigate the influence of vision on mechanical efficiency during slow, horizontal, constant-speed walking, and to determine whether any vision influence is modified by load carriage. Methods Each subject (n = 15) walked (3.3 km/h) for 10 min on a treadmill in four different conditions: (1) full vision, no carried load, (2) no vision, no carried load, (3) full vision with a 25.5-kg rucksack, (4) no vision with a 25.5-kg rucksack. Results Oxygen uptake was 0.94 ± 0.12 l/min in condition (1), 1.15 ± 0.20 l/min in (2), 1.15 ± 0.12 l/min in (3) and 1.35 ± 0.19 l/min in (4). Thus, lack of vision increased oxygen uptake by about 19%. Analyses of movement pattern, by use of optical markers attached to the limbs and torso, revealed considerably shorter step length (12 and 10%) in the no vision (2 and 4) than full vision conditions (1 and 3). No vision conditions (2 and 4) increased step width by 6 and 6%, and increased vertical foot clearance by 20 and 16% compared to full vision conditions (1 and 3). Conclusion The results suggest that vision has a marked influence on mechanical efficiency even during entrained, repetitive movements performed on an obstacle-free horizontal surface under highly predictable conditions.
2021
Poignant, Alexis; Legrand, Mathilde; Jarrassé, Nathanaël; Morel, Guillaume
Computing the positioning error of an upper-arm robotic prosthesis from the observation of its wearer’s posture Proceedings Article
In: 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 10446-10452, 2021, ISSN: 2577-087X.
Abstract | BibTeX | Tags: Ergonomy, Kinematics | Links:
@inproceedings{9561613,
title = {Computing the positioning error of an upper-arm robotic prosthesis from the observation of its wearer’s posture},
author = {Alexis Poignant and Mathilde Legrand and Nathana\"{e}l Jarrass\'{e} and Guillaume Morel},
doi = {10.1109/ICRA48506.2021.9561613},
issn = {2577-087X},
year = {2021},
date = {2021-05-01},
urldate = {2021-05-01},
booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {10446-10452},
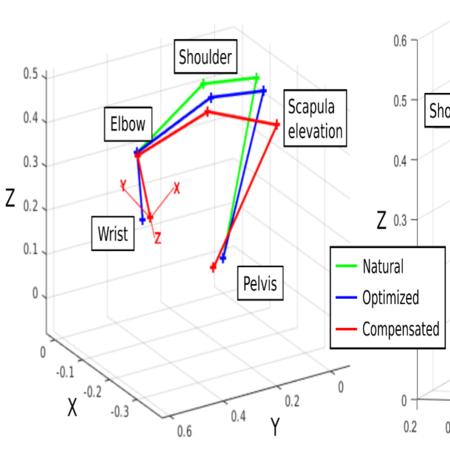
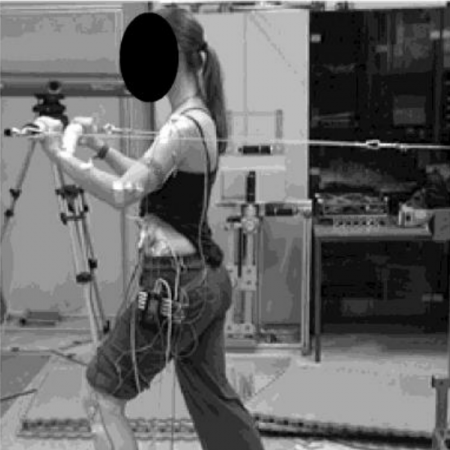
abstract = {When the arm prosthesis worn by an amputated Human being is not adequately configured with respect to the end-effector task, body compensations are often observed. Namely, to compensate for a wrong joint positioning on the robotic distal side, a subject trying to reach a desired position/orientation of his/her hand mobilizes his/her proximal joints, thus exploiting the redundancy of the human+robot kinematic chain.In this paper, we explore the possibility of exploiting this well-known behavior to reverse the causality: if we observe the posture of an amputated subject wearing a prosthesis during a hand positioning task, to what extent can we infer the positioning error of the prosthesis?To answer this question, we make the assumption that the adequate, or natural posture for a given task is one that optimizes a postural score. The proposed approach then consists in i) measuring the joint posture of the subject fitted with the prosthesis; ii) search for an alternative posture that optimizes a postural score within the null space of the human+robot kinematic chain and iii) compute the position error for the robot joints between the initial and the optimized posture.An experimental evaluation is provided with non amputated subjects who emulate erratic positioning of their distal joints during hand positioning tasks. Results show that joint errors are estimated with a precision that seems compatible with the implementation of a real time control algorithm.},
keywords = {Ergonomy, Kinematics},
pubstate = {published},
tppubtype = {inproceedings}
}
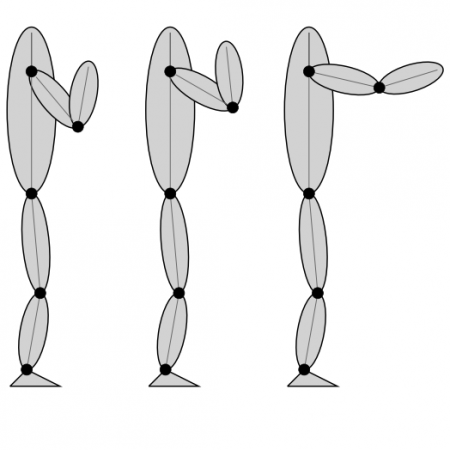
When the arm prosthesis worn by an amputated Human being is not adequately configured with respect to the end-effector task, body compensations are often observed. Namely, to compensate for a wrong joint positioning on the robotic distal side, a subject trying to reach a desired position/orientation of his/her hand mobilizes his/her proximal joints, thus exploiting the redundancy of the human+robot kinematic chain.In this paper, we explore the possibility of exploiting this well-known behavior to reverse the causality: if we observe the posture of an amputated subject wearing a prosthesis during a hand positioning task, to what extent can we infer the positioning error of the prosthesis?To answer this question, we make the assumption that the adequate, or natural posture for a given task is one that optimizes a postural score. The proposed approach then consists in i) measuring the joint posture of the subject fitted with the prosthesis; ii) search for an alternative posture that optimizes a postural score within the null space of the human+robot kinematic chain and iii) compute the position error for the robot joints between the initial and the optimized posture.An experimental evaluation is provided with non amputated subjects who emulate erratic positioning of their distal joints during hand positioning tasks. Results show that joint errors are estimated with a precision that seems compatible with the implementation of a real time control algorithm.
Sever, Jernej; Babič, Jan; Kozinc, Žiga; Šarabon, Nejc
Postural responses to sudden horizontal perturbations in tai chi practitioners Journal Article
In: International Journal of Environmental Research and Public Health, vol. 18, no. 5, pp. 1–12, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport | Links:
@article{Sever2021,
title = {Postural responses to sudden horizontal perturbations in tai chi practitioners},
author = {Jernej Sever and Jan Babi\v{c} and \v{Z}iga Kozinc and Nejc \v{S}arabon},
doi = {10.3390/ijerph18052692},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {5},
pages = {1--12},
abstract = {Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p \< 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005\textendash0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport},
pubstate = {published},
tppubtype = {article}
}
Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p < 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005–0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.
2020
Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Daniele; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 1, pp. 152–164, 2020, ISSN: 1534-4320.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance | Links:
@article{Maurice2020b,
title = {Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Daniele Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8856265/},
doi = {10.1109/TNSRE.2019.2945368},
issn = {1534-4320},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
volume = {28},
number = {1},
pages = {152--164},
address = {Nancy},
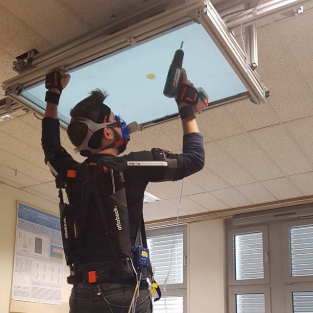
abstract = {Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.
Leskovar, Rebeka Koprivšek; Čamernik, Jernej; Petrič, Tadej
Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two Book Section
In: Mechanisms and Machine Science, vol. 84, pp. 199–207, 2020, ISSN: 22110992.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Physical Human Robot Interaction | Links:
@incollection{KropivsekLeskovar2020,
title = {Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two},
author = {Rebeka Kopriv\v{s}ek Leskovar and Jernej \v{C}amernik and Tadej Petri\v{c}},
url = {http://link.springer.com/10.1007/978-3-030-48989-2_22},
doi = {10.1007/978-3-030-48989-2_22},
issn = {22110992},
year = {2020},
date = {2020-01-01},
booktitle = {Mechanisms and Machine Science},
volume = {84},
pages = {199--207},
abstract = {In this paper we examine physical collaboration between two individuals using a dual-arm robot as a haptic interface. First, we design a haptic controller based on a virtual dynamic model of the robot arms. Then, we analyse dyadic human-human collaboration with a reaching task on a 2D plane, where the distance and size of the target changed randomly from a pool of nine reachable positions and sizes. Each subject performed the task individually and linked through the guided robot arms with a virtual model to perform the same task in collaboration. We evaluated both, individual and collaborative performances, based on Fitts' law, which describes the relation between the speed of motion and its accuracy. The results show that the Fitts' law applies to both, individual and collaborative tasks, with their performance improving when in collaboration.},
keywords = {Human Motor Control, Kinematics, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {incollection}
}
In this paper we examine physical collaboration between two individuals using a dual-arm robot as a haptic interface. First, we design a haptic controller based on a virtual dynamic model of the robot arms. Then, we analyse dyadic human-human collaboration with a reaching task on a 2D plane, where the distance and size of the target changed randomly from a pool of nine reachable positions and sizes. Each subject performed the task individually and linked through the guided robot arms with a virtual model to perform the same task in collaboration. We evaluated both, individual and collaborative performances, based on Fitts' law, which describes the relation between the speed of motion and its accuracy. The results show that the Fitts' law applies to both, individual and collaborative tasks, with their performance improving when in collaboration.
2019

Gorjan, Daša; Babič, Jan; Šarabon, Nejc; Potocanac, Zrinka
Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults Journal Article
In: Journal of Biomechanics, vol. 91, pp. 1–6, 2019, ISSN: 18732380.
Abstract | BibTeX | Tags: Kinematics, Muscle Mechanics, Postural Balance | Links:
@article{Gorjan2019,
title = {Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults},
author = {Da\v{s}a Gorjan and Jan Babi\v{c} and Nejc \v{S}arabon and Zrinka Potocanac},
url = {http://www.sciencedirect.com/science/article/pii/S0021929018307292},
doi = {10.1016/j.jbiomech.2018.09.008},
issn = {18732380},
year = {2019},
date = {2019-01-01},
journal = {Journal of Biomechanics},
volume = {91},
pages = {1--6},
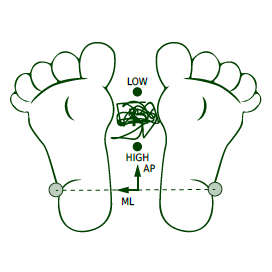
abstract = {Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p \< .001, RMS p ≤ .001, MPF p \< .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p \< .001), SD (p \< .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.},
keywords = {Kinematics, Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p < .001, RMS p ≤ .001, MPF p < .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p < .001), SD (p < .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.
Čamernik, Jernej; Kezić, Sanja; Babič, Jan
Threat-related changes in postural control in virtual environments Proceedings Article
In: 2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book, pp. 393, Edinburgh, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Postural Balance
@inproceedings{\v{C}amernik2019a,
title = {Threat-related changes in postural control in virtual environments},
author = {Jernej \v{C}amernik and Sanja Kezi\'{c} and Jan Babi\v{c}},
year = {2019},
date = {2019-01-01},
booktitle = {2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book},
pages = {393},
address = {Edinburgh},
abstract = {Immersive virtual reality (VR) can be used as a tool to treat various medical conditions including psychiatric and motor control disorders. Since it enables a highly modifiable environment and difficulty, it has a large potential to be used as a research platform to study balance control. Otherwise hard to achieve extreme and dangerous experiences like standing on a very high ledge, can be easily achieved with the immersive VR within the research lab. Furthermore, it has been shown that the level of immersion in VR is highly determined by the capability of the system to deliver an inclusive, extensive, surrounding, vivid and matching illusion of reality to the senses of a participant. Therefore, we prepared an immersive VR environment, coupled with a robotic device to further enhance the level of immersion. With this setup we aimed to evaluate the threat related changes in postural control when using immersive VR with additional bodily gravity cues.},
keywords = {Human Motor Control, Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Immersive virtual reality (VR) can be used as a tool to treat various medical conditions including psychiatric and motor control disorders. Since it enables a highly modifiable environment and difficulty, it has a large potential to be used as a research platform to study balance control. Otherwise hard to achieve extreme and dangerous experiences like standing on a very high ledge, can be easily achieved with the immersive VR within the research lab. Furthermore, it has been shown that the level of immersion in VR is highly determined by the capability of the system to deliver an inclusive, extensive, surrounding, vivid and matching illusion of reality to the senses of a participant. Therefore, we prepared an immersive VR environment, coupled with a robotic device to further enhance the level of immersion. With this setup we aimed to evaluate the threat related changes in postural control when using immersive VR with additional bodily gravity cues.
Čamernik, Jernej; Azad, Morteza; Peternel, Luka; Potočanac, Zrinka; Babič, Jan
Staying on your feet: the effectiveness of posture and handles in counteracting balance perturbation Journal Article
In: Ergonomics, vol. 62, no. 5, pp. 657–667, 2019, ISSN: 0014-0139.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Postural Balance | Links:
@article{\v{C}amernik2019b,
title = {Staying on your feet: the effectiveness of posture and handles in counteracting balance perturbation},
author = {Jernej \v{C}amernik and Morteza Azad and Luka Peternel and Zrinka Poto\v{c}anac and Jan Babi\v{c}},
url = {https://doi.org/10.1080/00140139.2018.1559363 https://www.tandfonline.com/doi/full/10.1080/00140139.2018.1559363},
doi = {10.1080/00140139.2018.1559363},
issn = {0014-0139},
year = {2019},
date = {2019-01-01},
journal = {Ergonomics},
volume = {62},
number = {5},
pages = {657--667},
publisher = {Taylor \& Francis},
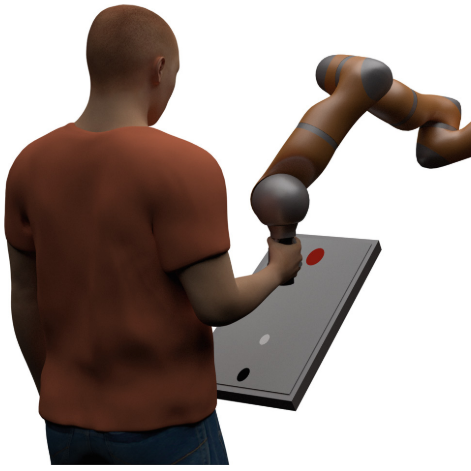
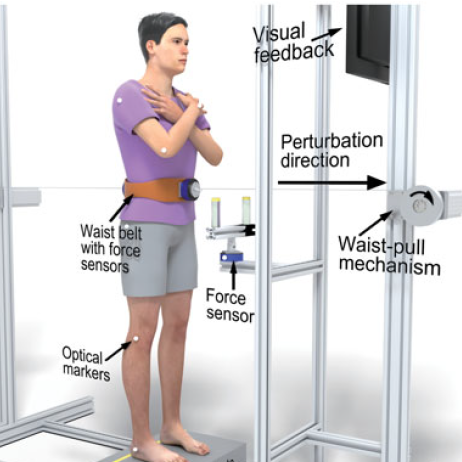
abstract = {Stairways, public transport and inclined walkways are often considered as sites with higher likelihood of falls due to a sudden loss of balance. Such sites are usually marked with warning signs, equipped with non-slip surfaces and handles or handrails to avert or decrease this likelihood. Especially, handles are supposed to provide additional support in cases of a sudden loss of balance. However, the mechanisms of using handles for balance at different heights are not yet fully disclosed. We simulated full body perturbations by applying an anterior force to the waist and investigated effectiveness and mechanisms of balance recovery in five different postures: step stance and normal stance with or without holding handles at different heights. Results indicate that both step stance and holding handles at different vertical positions sufficiently assist balance recovery, compared to normal stance. While there was no significant effect of handle in CoM displacement, the shoulder height handle required the lowest handle force, indicating a difference in using the handle. Practitioner summary: To investigate handle use for balance recovery, we perturbed healthy young adults in different standing positions. Even though the use of different handles had a similar effect, the lowest forces were exerted on the shoulder height handle indicating a preferred handle position for balance recovery. Abbreviation: AP: antero-posterior; CNS: Central nervous system; CoM: Center of Mass; CoMmax: Maximal displacement of the center of mass; CoP: Center of pressure; FHmax: Maximal resultant force exerted on the handle; hFHmax: Maximal horizontal force exerted on the handle; vFHmax; Maximal vertical force exerted on the handle; M1-M8: Perturbation force magnitude.},
keywords = {Human Motor Control, Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Stairways, public transport and inclined walkways are often considered as sites with higher likelihood of falls due to a sudden loss of balance. Such sites are usually marked with warning signs, equipped with non-slip surfaces and handles or handrails to avert or decrease this likelihood. Especially, handles are supposed to provide additional support in cases of a sudden loss of balance. However, the mechanisms of using handles for balance at different heights are not yet fully disclosed. We simulated full body perturbations by applying an anterior force to the waist and investigated effectiveness and mechanisms of balance recovery in five different postures: step stance and normal stance with or without holding handles at different heights. Results indicate that both step stance and holding handles at different vertical positions sufficiently assist balance recovery, compared to normal stance. While there was no significant effect of handle in CoM displacement, the shoulder height handle required the lowest handle force, indicating a difference in using the handle. Practitioner summary: To investigate handle use for balance recovery, we perturbed healthy young adults in different standing positions. Even though the use of different handles had a similar effect, the lowest forces were exerted on the shoulder height handle indicating a preferred handle position for balance recovery. Abbreviation: AP: antero-posterior; CNS: Central nervous system; CoM: Center of Mass; CoMmax: Maximal displacement of the center of mass; CoP: Center of pressure; FHmax: Maximal resultant force exerted on the handle; hFHmax: Maximal horizontal force exerted on the handle; vFHmax; Maximal vertical force exerted on the handle; M1-M8: Perturbation force magnitude.
2015
Petrič, Tadej; Colasanto, Luca; Gams, Andrej; Ude, Aleš; Ijspeert, Auke J
Bio-inspired learning and database expansion of Compliant Movement Primitives Proceedings Article
In: 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), pp. 346–351, IEEE, Seoul, 2015, ISSN: 21640580.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Machine Learning | Links:
@inproceedings{Petric2015,
title = {Bio-inspired learning and database expansion of Compliant Movement Primitives},
author = {Tadej Petri\v{c} and Luca Colasanto and Andrej Gams and Ale\v{s} Ude and Auke J Ijspeert},
url = {http://ieeexplore.ieee.org/document/7363573/},
doi = {10.1109/HUMANOIDS.2015.7363573},
issn = {21640580},
year = {2015},
date = {2015-11-01},
booktitle = {2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids)},
pages = {346--351},
publisher = {IEEE},
address = {Seoul},
abstract = {The paper addresses the problem of learning torque primitives - the torques associated to a kinematic trajectory, and required in order to accurately track this kinematic trajectory. Learning torque primitives, which can be interpreted as internal dynamic models, is crucial to achieve at the same time (1) high tracking accuracy and (2) compliant behaviour. The latter improves the safety concerns of working in unstructured environments or with humans. In the proposed approach, first learning by demonstration is used to obtain the kinematic trajectories, which are encoded in the form of Dynamic Movement Primitives (DMPs). These are combined with the corresponding task-specific Torque Primitives (TPs), and together they form new task-related compliant movements, denoted as Compliant Movement Primitives (CMPs). Unlike the DMPs, the TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability, we propose a novel method which can autonomously learn task-specific Torque Primitives (TPs) associated to given kinematic trajectories in the form of DMPs. The proposed algorithm is completely autonomous, and can be used to rapidly generate and expand the database of CMPs motions. Since the CMPs are parameterized, statistical generalisation can be used to obtain an initial TP estimate of a new CMP motion. Thereby, the learning rate of new CMPs can be significantly improved. The evaluation of the proposed approach on a humanoid robot CoMan performing reaching task shows fast TP acquisition and accurate generalization estimates in real-world scenarios.},
keywords = {Compliance and Impedance Control, Kinematics, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper addresses the problem of learning torque primitives - the torques associated to a kinematic trajectory, and required in order to accurately track this kinematic trajectory. Learning torque primitives, which can be interpreted as internal dynamic models, is crucial to achieve at the same time (1) high tracking accuracy and (2) compliant behaviour. The latter improves the safety concerns of working in unstructured environments or with humans. In the proposed approach, first learning by demonstration is used to obtain the kinematic trajectories, which are encoded in the form of Dynamic Movement Primitives (DMPs). These are combined with the corresponding task-specific Torque Primitives (TPs), and together they form new task-related compliant movements, denoted as Compliant Movement Primitives (CMPs). Unlike the DMPs, the TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability, we propose a novel method which can autonomously learn task-specific Torque Primitives (TPs) associated to given kinematic trajectories in the form of DMPs. The proposed algorithm is completely autonomous, and can be used to rapidly generate and expand the database of CMPs motions. Since the CMPs are parameterized, statistical generalisation can be used to obtain an initial TP estimate of a new CMP motion. Thereby, the learning rate of new CMPs can be significantly improved. The evaluation of the proposed approach on a humanoid robot CoMan performing reaching task shows fast TP acquisition and accurate generalization estimates in real-world scenarios.
2014
Azad, Morteza; Babič, Jan; Mistry, Michael
Effects of hand contact on the stability of a planar humanoid with a momentum based controller Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 348–353, IEEE, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2014,
title = {Effects of hand contact on the stability of a planar humanoid with a momentum based controller},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {http://ieeexplore.ieee.org/document/7041383/},
doi = {10.1109/HUMANOIDS.2014.7041383},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-11-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {348--353},
publisher = {IEEE},
abstract = {This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.
2013
Deniša, Miha; Petrič, Tadej; Asfour, Tamim; Ude, Aleš
Synthesizing compliant reaching movements by searching a database of example trajectories Proceedings Article
In: 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), pp. 540–546, IEEE, Atlanta, 2013, ISBN: 978-1-4799-2617-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics | Links:
@inproceedings{Denisa2013,
title = {Synthesizing compliant reaching movements by searching a database of example trajectories},
author = {Miha Deni\v{s}a and Tadej Petri\v{c} and Tamim Asfour and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/7030026/},
doi = {10.1109/HUMANOIDS.2013.7030026},
isbn = {978-1-4799-2617-6},
year = {2013},
date = {2013-01-01},
booktitle = {2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids)},
pages = {540--546},
publisher = {IEEE},
address = {Atlanta},
abstract = {We address the problem of generating new com- pliant reaching movements by searching a structured database of example trajectories. The proposed control framework is a multi-step process, where in the first step a human tutor teaches the robot how to perform a set of example reaching movements. In the second step, the recorded motion trajectories are executed with different velocities using a high gain feedback controller, for the purpose of learning corresponding torque control signals. The commanded torques are measured and stored together with the trajectory data. This data is organized in a hierarchical, graph-like structure, thereby providing the basis for search for new compliant trajectories, which can consist of parts of the previously acquired example movements. The proposed approach can construct a complete representation for newly discovered movements, including the feedforward torque commands. Finally, in the last step, the motion is executed using a low gain feedback controller and the associated feedforward torque signal. This ensures sufficient tracking accuracy and at the same time compliant behavior, which allows smooth interaction with the environment and is safe for cooperative task execution with humans. The usefulness of the proposed method was shown on a Kuka LWR robot.},
keywords = {Compliance and Impedance Control, Kinematics},
pubstate = {published},
tppubtype = {inproceedings}
}
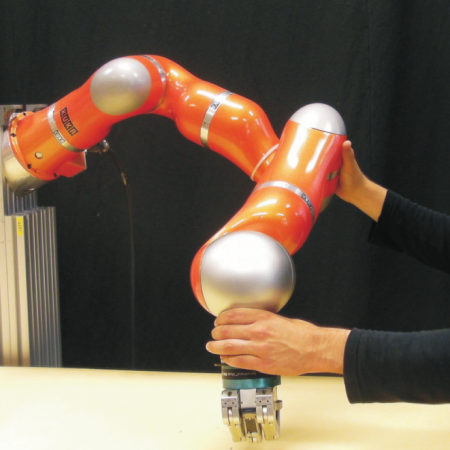
We address the problem of generating new com- pliant reaching movements by searching a structured database of example trajectories. The proposed control framework is a multi-step process, where in the first step a human tutor teaches the robot how to perform a set of example reaching movements. In the second step, the recorded motion trajectories are executed with different velocities using a high gain feedback controller, for the purpose of learning corresponding torque control signals. The commanded torques are measured and stored together with the trajectory data. This data is organized in a hierarchical, graph-like structure, thereby providing the basis for search for new compliant trajectories, which can consist of parts of the previously acquired example movements. The proposed approach can construct a complete representation for newly discovered movements, including the feedforward torque commands. Finally, in the last step, the motion is executed using a low gain feedback controller and the associated feedforward torque signal. This ensures sufficient tracking accuracy and at the same time compliant behavior, which allows smooth interaction with the environment and is safe for cooperative task execution with humans. The usefulness of the proposed method was shown on a Kuka LWR robot.
2011
Petrič, Tadej; Gams, Andrej; Ijspeert, Auke J; Žlajpah, Leon
On-line frequency adaptation and movement imitation for rhythmic robotic tasks Journal Article
In: The International Journal of Robotics Research, vol. 30, no. 14, pp. 1775–1788, 2011, ISSN: 0278-3649.
Abstract | BibTeX | Tags: Dynamic Motion, Kinematics | Links:
@article{Petric2011a,
title = {On-line frequency adaptation and movement imitation for rhythmic robotic tasks},
author = {Tadej Petri\v{c} and Andrej Gams and Auke J Ijspeert and Leon \v{Z}lajpah},
url = {http://journals.sagepub.com/doi/10.1177/0278364911421511},
doi = {10.1177/0278364911421511},
issn = {0278-3649},
year = {2011},
date = {2011-01-01},
journal = {The International Journal of Robotics Research},
volume = {30},
number = {14},
pages = {1775--1788},
abstract = {In this paper we present a novel method to obtain the basic frequency of an unknown periodic signal with an arbitrary waveform, which can work online with no additional signal processing or logical operations. The method originates from non-linear dynamical systems for frequency extraction, which are based on adaptive frequency oscillators in a feedback loop. In previous work, we had developed a method that could extract separate frequency components by using several adaptive frequency oscillators in a loop, but that method required a logical algorithm to identify the basic frequency. The novel method presented here uses a Fourier series representation in the feedback loop combined with a single oscillator. In this way it can extract the frequency and the phase of an unknown periodic signal in real time and without any additional signal processing or preprocessing. The method determines the Fourier series coefficients and can be used for dynamic Fourier series implementation. The proposed method can be used for the control of rhythmic robotic tasks, where only the extraction of the basic frequency is crucial. For demonstration several highly non-linear and dynamic periodic robotic tasks are shown, including also a task where an electromyography (EMG) signal is used in a feedback loop.},
keywords = {Dynamic Motion, Kinematics},
pubstate = {published},
tppubtype = {article}
}
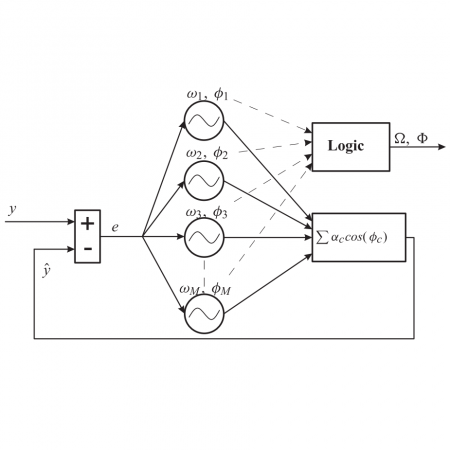
In this paper we present a novel method to obtain the basic frequency of an unknown periodic signal with an arbitrary waveform, which can work online with no additional signal processing or logical operations. The method originates from non-linear dynamical systems for frequency extraction, which are based on adaptive frequency oscillators in a feedback loop. In previous work, we had developed a method that could extract separate frequency components by using several adaptive frequency oscillators in a loop, but that method required a logical algorithm to identify the basic frequency. The novel method presented here uses a Fourier series representation in the feedback loop combined with a single oscillator. In this way it can extract the frequency and the phase of an unknown periodic signal in real time and without any additional signal processing or preprocessing. The method determines the Fourier series coefficients and can be used for dynamic Fourier series implementation. The proposed method can be used for the control of rhythmic robotic tasks, where only the extraction of the basic frequency is crucial. For demonstration several highly non-linear and dynamic periodic robotic tasks are shown, including also a task where an electromyography (EMG) signal is used in a feedback loop.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si