




2025
Poignant, Alexis; Morel, Guillaume; Jarrassé, Nathanaël
A Comparative Study Between a Virtual Wand and a One-to-One Approach for the Teleoperation of a Nearby Robotic Manipulator Proceedings Article
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 5608-5614, 2025.
Abstract | BibTeX | Tags: Human Motor Control, Teleoperation | Links:
@inproceedings{11127740,
title = {A Comparative Study Between a Virtual Wand and a One-to-One Approach for the Teleoperation of a Nearby Robotic Manipulator},
author = {Alexis Poignant and Guillaume Morel and Nathana\"{e}l Jarrass\'{e}},
doi = {10.1109/ICRA55743.2025.11127740},
year = {2025},
date = {2025-05-01},
urldate = {2025-05-01},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {5608-5614},
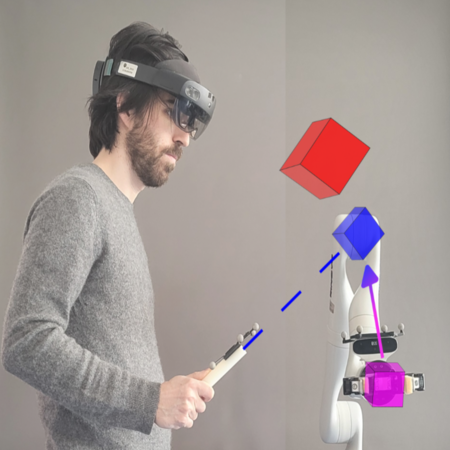
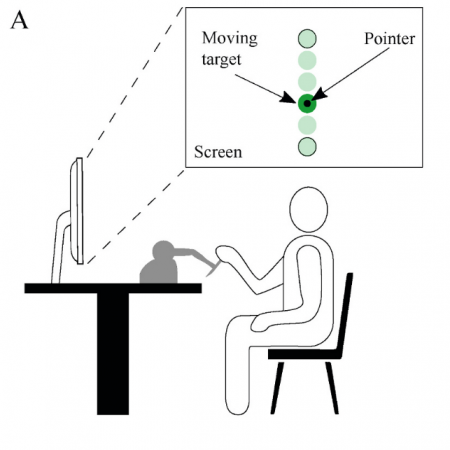
abstract = {The prevailing and most effective approach to teleoperate a robotic arm involves a direct position-to-position mapping, imposing robotic end-effector movements that mirrors those of the user, Fig. 1-top. However, due to this one-to-one mapping, the robot\'s motions are limited by the user\'s capability, particularly in translation. Drawing inspiration from head pointers utilized in the 1980s, originally designed to enable drawing with limited head motions for tetraplegic individuals, we proposed a “virtual wand” mapping which could be used by participants with reduced mobility. This mapping employs a virtual rigid linkage between the hand and the robot\'s endeffector, Fig. 1-bottom. With this approach, rotations produce amplified translations through a lever arm, creating a “rotation-to-position” coupling and expanding the translation workspace at the expense of a reduced rotation space. In this study, we compare the virtual wand approach to the one-to-one position mapping through the realization of 6-DoF reaching tasks. Results indicate that the two different mappings perform comparably well, are equally well-received by users, and exhibit similar motor control behaviors. Nevertheless, the virtual wand mapping is anticipated to outperform in tasks characterized by large translations and minimal effector rotations, whereas direct mapping is expected to demonstrate advantages in large rotations with minimal translations. These results pave the way for new interactions and interfaces, particularly in disability assistance utilizing residual body movements (instead of hands) as control input. Leveraging body parts with substantial rotations could enable the accomplishment of tasks previously deemed infeasible with standard direct coupling interfaces.},
keywords = {Human Motor Control, Teleoperation},
pubstate = {published},
tppubtype = {inproceedings}
}
The prevailing and most effective approach to teleoperate a robotic arm involves a direct position-to-position mapping, imposing robotic end-effector movements that mirrors those of the user, Fig. 1-top. However, due to this one-to-one mapping, the robot's motions are limited by the user's capability, particularly in translation. Drawing inspiration from head pointers utilized in the 1980s, originally designed to enable drawing with limited head motions for tetraplegic individuals, we proposed a “virtual wand” mapping which could be used by participants with reduced mobility. This mapping employs a virtual rigid linkage between the hand and the robot's endeffector, Fig. 1-bottom. With this approach, rotations produce amplified translations through a lever arm, creating a “rotation-to-position” coupling and expanding the translation workspace at the expense of a reduced rotation space. In this study, we compare the virtual wand approach to the one-to-one position mapping through the realization of 6-DoF reaching tasks. Results indicate that the two different mappings perform comparably well, are equally well-received by users, and exhibit similar motor control behaviors. Nevertheless, the virtual wand mapping is anticipated to outperform in tasks characterized by large translations and minimal effector rotations, whereas direct mapping is expected to demonstrate advantages in large rotations with minimal translations. These results pave the way for new interactions and interfaces, particularly in disability assistance utilizing residual body movements (instead of hands) as control input. Leveraging body parts with substantial rotations could enable the accomplishment of tasks previously deemed infeasible with standard direct coupling interfaces.
Poignant, Alexis; Jarrassé, Nathanaël; Morel, Guillaume
Teleoperating a 6 DoF Robotic Manipulator from Head Movements Proceedings Article
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 1-8, 2025.
Abstract | BibTeX | Tags: Human Motor Control, Teleoperation | Links:
@inproceedings{11127494,
title = {Teleoperating a 6 DoF Robotic Manipulator from Head Movements},
author = {Alexis Poignant and Nathana\"{e}l Jarrass\'{e} and Guillaume Morel},
doi = {10.1109/ICRA55743.2025.11127494},
year = {2025},
date = {2025-05-01},
urldate = {2025-05-01},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1-8},
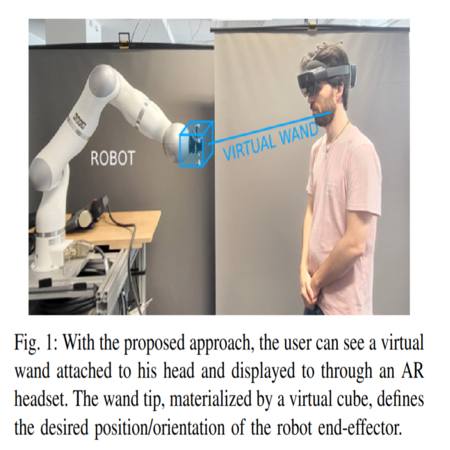
abstract = {This article presents an interactive control approach allowing a human user to teleoperate a robotic manipulator located nearby. With this approach, the user keeps his/her hands free, as only head movements are exploited to control the robot. The controller maps the 6 Degrees of Freedom (DoF) user\'s head position and orientation into the 6 DoF robot endeffector position and orientation. The robot can reach a large workspace thanks to the combination of two features. Firstly, a virtual wand between the user\'s head and the robot end-effector converts user\'s head pantilt rotations into large displacements of the robot end-effector center perpendicularly to the wand axis (2 DoF). Secondly, for the remaining 4 DoF (robot end-effector center displacement along the wand axis and robot en-effector orientation), realtime deformation of the virtual wand is triggered when the user reaches uncomfortable configurations due to his/her head workspace limitations. Additionally, the user gets, through an Augmented Reality (AR) Headset, a non-delayed visual feedback of the current virtual wand geometry and location. The paper includes a description of the setup and the proposed controller, detailing how the robot position/orientation is coupled to the user\'s head position/orientation. A set of elementary experiments with a constant-geometry wand is first presented, showing workspace limitations for some DoF. Then the wand reconfiguration is introduced in the experiments, leading to full control of 6 DoF manipulation tasks throughout a large workspace.},
keywords = {Human Motor Control, Teleoperation},
pubstate = {published},
tppubtype = {inproceedings}
}
This article presents an interactive control approach allowing a human user to teleoperate a robotic manipulator located nearby. With this approach, the user keeps his/her hands free, as only head movements are exploited to control the robot. The controller maps the 6 Degrees of Freedom (DoF) user's head position and orientation into the 6 DoF robot endeffector position and orientation. The robot can reach a large workspace thanks to the combination of two features. Firstly, a virtual wand between the user's head and the robot end-effector converts user's head pantilt rotations into large displacements of the robot end-effector center perpendicularly to the wand axis (2 DoF). Secondly, for the remaining 4 DoF (robot end-effector center displacement along the wand axis and robot en-effector orientation), realtime deformation of the virtual wand is triggered when the user reaches uncomfortable configurations due to his/her head workspace limitations. Additionally, the user gets, through an Augmented Reality (AR) Headset, a non-delayed visual feedback of the current virtual wand geometry and location. The paper includes a description of the setup and the proposed controller, detailing how the robot position/orientation is coupled to the user's head position/orientation. A set of elementary experiments with a constant-geometry wand is first presented, showing workspace limitations for some DoF. Then the wand reconfiguration is introduced in the experiments, leading to full control of 6 DoF manipulation tasks throughout a large workspace.
Eden, Jonathan; Khoramshahi, Mahdi; Huang, Yanpei; Poignant, Alexis; Burdet, Etienne; Jarrassé, Nathanaël
Comparison of Solo and Collaborative Trimanual Operation of a Supernumerary Limb in Tasks With Varying Physical Coupling Journal Article
In: IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 860-867, 2025, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Physical Human Robot Interaction | Links:
@article{10792937,
title = {Comparison of Solo and Collaborative Trimanual Operation of a Supernumerary Limb in Tasks With Varying Physical Coupling},
author = {Jonathan Eden and Mahdi Khoramshahi and Yanpei Huang and Alexis Poignant and Etienne Burdet and Nathana\"{e}l Jarrass\'{e}},
doi = {10.1109/LRA.2024.3515734},
issn = {2377-3766},
year = {2025},
date = {2025-02-01},
urldate = {2025-02-01},
journal = {IEEE Robotics and Automation Letters},
volume = {10},
number = {2},
pages = {860-867},
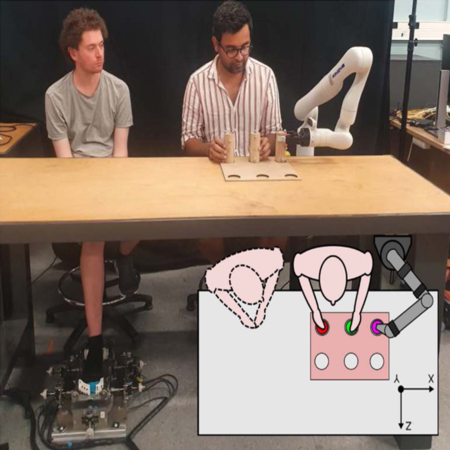
abstract = {Through the use of robotic supernumerary limbs, it has been proposed that a single user could perform tasks like surgery or industrial assembly that currently require a team. Although validation studies, often conducted in virtual reality, have demonstrated that individuals can learn to command supernumerary limbs, comparisons typically suggest that a team initially outperforms a supernumerary limb operating individual. In this study, we examined (i) the impact of using a commercially available physical robot setup instead of a virtual reality system and (ii) the effect of limb couplings on user performance during a series of trimanual operations. Contrary to previous findings, our results indicate no clear difference in user performance when working as a trimanual user, in the pick and place of three objects, compared to when working as a team. Additionally, for this task we observe that while users prefer working with a partner when they control most limbs, we find no clear difference in their preference between solo trimanual operation and when they work with a partner and control the third limb. These findings indicate that factors typically not present in virtual reality such as visual occlusion and haptic feedback may be vital to consider for the effective operation of supernumerary limbs, and provide initial evidence to support the viability of supernumerary limbs for a range of physical tasks.},
keywords = {Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Through the use of robotic supernumerary limbs, it has been proposed that a single user could perform tasks like surgery or industrial assembly that currently require a team. Although validation studies, often conducted in virtual reality, have demonstrated that individuals can learn to command supernumerary limbs, comparisons typically suggest that a team initially outperforms a supernumerary limb operating individual. In this study, we examined (i) the impact of using a commercially available physical robot setup instead of a virtual reality system and (ii) the effect of limb couplings on user performance during a series of trimanual operations. Contrary to previous findings, our results indicate no clear difference in user performance when working as a trimanual user, in the pick and place of three objects, compared to when working as a team. Additionally, for this task we observe that while users prefer working with a partner when they control most limbs, we find no clear difference in their preference between solo trimanual operation and when they work with a partner and control the third limb. These findings indicate that factors typically not present in virtual reality such as visual occlusion and haptic feedback may be vital to consider for the effective operation of supernumerary limbs, and provide initial evidence to support the viability of supernumerary limbs for a range of physical tasks.
Arditi, Emir; Kunavar, Tjasa; Amirshirzad, Negin; Ugur, Emre; Babič, Jan; Oztop, Erhan
Inferring effort-safety trade off in perturbed squat-to-stand task by reward parameter estimation Journal Article
In: Engineering Applications of Artificial Intelligence, vol. 142, pp. 109778, 2025, ISSN: 09521976.
Abstract | BibTeX | Tags: Human Motor Control, Machine Learning, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning | Links:
@article{Arditi2025,
title = {Inferring effort-safety trade off in perturbed squat-to-stand task by reward parameter estimation},
author = {Emir Arditi and Tjasa Kunavar and Negin Amirshirzad and Emre Ugur and Jan Babi\v{c} and Erhan Oztop},
doi = {10.1016/j.engappai.2024.109778},
issn = {09521976},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Engineering Applications of Artificial Intelligence},
volume = {142},
pages = {109778},
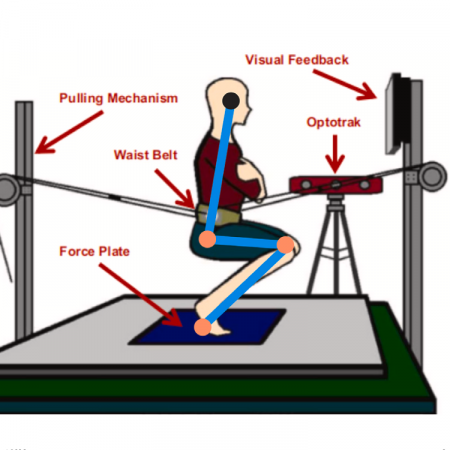
abstract = {In this study, an inverse reinforcement learning (IRL) method is developed to estimate the parameters of a reward function that is assumed to guide the movement of a biological or artificial agent. The workings of the method is shown on the problem of estimating the effort-safety trade-off of humans during perturbed squat-to-stand motions based on their Center of Mass (COM) trajectories. The proposed method involves data generation by reinforcement learning (RL) and a novel data augmentation mechanism followed by neural network training. After the training, the neural network acts as the reward parameter estimator given the Center of Mass (COM) trajectories as input. The performance of the developed method is assessed through systematic simulation experiments, where it is shown that the parameter estimation made by our method is significantly more accurate than the baseline of an optimized template-based IRL approach. In addition, as a proof of concept, a set of human movement data is analyzed with the developed method. The results revealed that most participants acquired a strategy that ensures low effort expenditure with a safety margin, producing COM trajectories slightly away from the effort-optimal.},
keywords = {Human Motor Control, Machine Learning, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In this study, an inverse reinforcement learning (IRL) method is developed to estimate the parameters of a reward function that is assumed to guide the movement of a biological or artificial agent. The workings of the method is shown on the problem of estimating the effort-safety trade-off of humans during perturbed squat-to-stand motions based on their Center of Mass (COM) trajectories. The proposed method involves data generation by reinforcement learning (RL) and a novel data augmentation mechanism followed by neural network training. After the training, the neural network acts as the reward parameter estimator given the Center of Mass (COM) trajectories as input. The performance of the developed method is assessed through systematic simulation experiments, where it is shown that the parameter estimation made by our method is significantly more accurate than the baseline of an optimized template-based IRL approach. In addition, as a proof of concept, a set of human movement data is analyzed with the developed method. The results revealed that most participants acquired a strategy that ensures low effort expenditure with a safety margin, producing COM trajectories slightly away from the effort-optimal.
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Jarrassé, Nathanaël
JcvPCA and JsvCRP: A set of metrics to evaluate changes in joint coordination strategies Journal Article
In: PLOS ONE, vol. 20, no. 8, pp. 1-22, 2025.
Abstract | BibTeX | Tags: Kinematics | Links:
@article{dubois2025JcvPCA,
title = {JcvPCA and JsvCRP: A set of metrics to evaluate changes in joint coordination strategies},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Nathana\"{e}l Jarrass\'{e}},
url = {https://doi.org/10.1371/journal.pone.0325792},
doi = {10.1371/journal.pone.0325792},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {PLOS ONE},
volume = {20},
number = {8},
pages = {1-22},
publisher = {Public Library of Science},
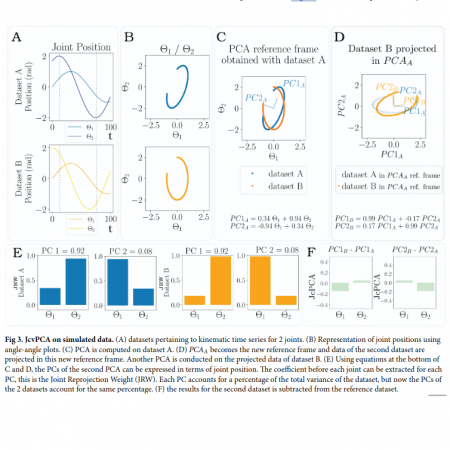
abstract = {Characterizing changes in inter-joint coordination presents significant challenges, as it necessitates the examination of relationships between multiple degrees of freedom during movements and their temporal evolution. Existing metrics are inadequate in providing physiologically coherent results that document both the temporal and spatial aspects of inter-joint coordination. In this article, we introduce two novel metrics to enhance the analysis of inter-joint coordination. The first metric, Joint Contribution Variation based on Principal Component Analysis (JcvPCA), evaluates the variation in each joint’s contribution during series of movements. The second metric, Joint Synchronization Variation based on Continuous Relative Phase (JsvCRP), measures the variation in temporal synchronization among joints between two movement datasets. We begin by presenting each metric and explaining their derivation. We then demonstrate the application of these metrics using simulated and experimental datasets involving identical movement tasks performed with distinct coordination strategies. The results show that these metrics can successfully differentiate between unique coordination strategies, providing meaningful insights into joint collaboration during movement. These metrics hold significant potential for fields such as ergonomics and clinical rehabilitation, where a precise understanding of the evolution of inter-joint coordination strategies is crucial. Potential applications include evaluating the effects of upper limb exoskeletons in industrial settings or monitoring the progress of patients undergoing neurological rehabilitation.},
keywords = {Kinematics},
pubstate = {published},
tppubtype = {article}
}
Characterizing changes in inter-joint coordination presents significant challenges, as it necessitates the examination of relationships between multiple degrees of freedom during movements and their temporal evolution. Existing metrics are inadequate in providing physiologically coherent results that document both the temporal and spatial aspects of inter-joint coordination. In this article, we introduce two novel metrics to enhance the analysis of inter-joint coordination. The first metric, Joint Contribution Variation based on Principal Component Analysis (JcvPCA), evaluates the variation in each joint’s contribution during series of movements. The second metric, Joint Synchronization Variation based on Continuous Relative Phase (JsvCRP), measures the variation in temporal synchronization among joints between two movement datasets. We begin by presenting each metric and explaining their derivation. We then demonstrate the application of these metrics using simulated and experimental datasets involving identical movement tasks performed with distinct coordination strategies. The results show that these metrics can successfully differentiate between unique coordination strategies, providing meaningful insights into joint collaboration during movement. These metrics hold significant potential for fields such as ergonomics and clinical rehabilitation, where a precise understanding of the evolution of inter-joint coordination strategies is crucial. Potential applications include evaluating the effects of upper limb exoskeletons in industrial settings or monitoring the progress of patients undergoing neurological rehabilitation.
Brunelli, Giovanni; Dubois, Océane; Tiboni, Monica; Jarrassé, Nathanaël
Review of upper-limb occupational exoskeletons: From technology to assessment Journal Article
In: International Journal of Industrial Ergonomics, vol. 110, pp. 103815, 2025, ISSN: 0169-8141.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control | Links:
@article{brunelli2025Review,
title = {Review of upper-limb occupational exoskeletons: From technology to assessment},
author = {Giovanni Brunelli and Oc\'{e}ane Dubois and Monica Tiboni and Nathana\"{e}l Jarrass\'{e}},
url = {https://www.sciencedirect.com/science/article/pii/S0169814125001210},
doi = {https://doi.org/10.1016/j.ergon.2025.103815},
issn = {0169-8141},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {International Journal of Industrial Ergonomics},
volume = {110},
pages = {103815},
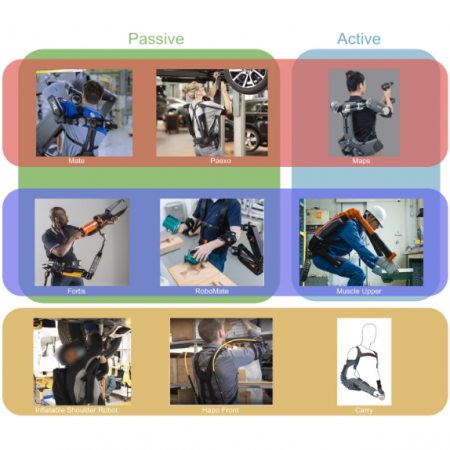
abstract = {Occupational exoskeletons are emerging as a promising solution to reduce work-related musculoskeletal disorders (MSDs) across various industries. Upper-limb exoskeletons are particularly relevant, given the high prevalence of MSDs associated with repetitive arm motions and overhead tasks. However, evaluating the effectiveness of these devices requires careful analysis of the specific technologies and kinematic designs they incorporate to ensure their safe and effective integration. This paper presents a detailed technological review and analysis of the existing literature, focusing on the diversity of technologies and the need for more comprehensive studies addressing challenges in both laboratory and real-world settings. This study particularly highlights the necessity of assessments that account for the unique characteristics of different exoskeleton technologies, rather than generalizing across them. It also emphasize the need to examine not only reductions in muscle activity but also the potential for overlooked side effects, long-term impacts, and adaptations across different task types. These factors are crucial, as upper-limb exoskeletons are planned to be deployed for prolonged use in complex industrial environments.},
keywords = {Ergonomy, Exoskeleton Design and Control},
pubstate = {published},
tppubtype = {article}
}
Occupational exoskeletons are emerging as a promising solution to reduce work-related musculoskeletal disorders (MSDs) across various industries. Upper-limb exoskeletons are particularly relevant, given the high prevalence of MSDs associated with repetitive arm motions and overhead tasks. However, evaluating the effectiveness of these devices requires careful analysis of the specific technologies and kinematic designs they incorporate to ensure their safe and effective integration. This paper presents a detailed technological review and analysis of the existing literature, focusing on the diversity of technologies and the need for more comprehensive studies addressing challenges in both laboratory and real-world settings. This study particularly highlights the necessity of assessments that account for the unique characteristics of different exoskeleton technologies, rather than generalizing across them. It also emphasize the need to examine not only reductions in muscle activity but also the potential for overlooked side effects, long-term impacts, and adaptations across different task types. These factors are crucial, as upper-limb exoskeletons are planned to be deployed for prolonged use in complex industrial environments.
Babič, Jan; Kunavar, Tjasa; Oztop, Erhan; Kawato, Mitsuo
Success-efficient/failure-safe strategy for hierarchical reinforcement motor learning Journal Article
In: PLOS Computational Biology, vol. 21, iss. 5, pp. e1013089, 2025, ISSN: 1553-7358.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Babi2025,
title = {Success-efficient/failure-safe strategy for hierarchical reinforcement motor learning},
author = {Jan Babi\v{c} and Tjasa Kunavar and Erhan Oztop and Mitsuo Kawato},
doi = {10.1371/journal.pcbi.1013089},
issn = {1553-7358},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {PLOS Computational Biology},
volume = {21},
issue = {5},
pages = {e1013089},
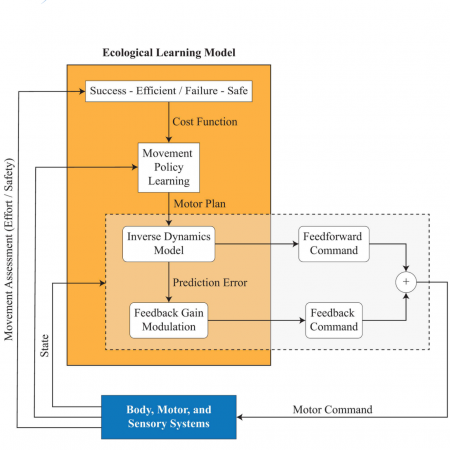
abstract = {Our study explores how ecological aspects of motor learning enhance survival by improving movement efficiency and mitigating injury risks during task failures. Traditional motor control theories mainly address isolated body movements and often overlook these ecological factors. We introduce a novel computational motor control approach, incorporating ecological fitness and a strategy that alternates between success-driven movement efficiency and failure-driven safety, akin to win-stay/lose-shift tactics. In our experiments, participants performed squat-to-stand movements under novel force perturbations. They adapted effectively through various adaptive motor control mechanisms to avoid falls, reducing failure rates rapidly. The results indicate a high-level ecological controller in human motor learning that switches objectives between safety and movement efficiency, depending on failure or success. This approach is supported by policy learning, internal model adaptation, and adaptive feedback control. Our findings offer a comprehensive perspective on human motor control, integrating risk management in a hierarchical reinforcement learning framework for real-world environments.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Our study explores how ecological aspects of motor learning enhance survival by improving movement efficiency and mitigating injury risks during task failures. Traditional motor control theories mainly address isolated body movements and often overlook these ecological factors. We introduce a novel computational motor control approach, incorporating ecological fitness and a strategy that alternates between success-driven movement efficiency and failure-driven safety, akin to win-stay/lose-shift tactics. In our experiments, participants performed squat-to-stand movements under novel force perturbations. They adapted effectively through various adaptive motor control mechanisms to avoid falls, reducing failure rates rapidly. The results indicate a high-level ecological controller in human motor learning that switches objectives between safety and movement efficiency, depending on failure or success. This approach is supported by policy learning, internal model adaptation, and adaptive feedback control. Our findings offer a comprehensive perspective on human motor control, integrating risk management in a hierarchical reinforcement learning framework for real-world environments.
Fele, Benjamin; Babič, Jan
Curriculum Learning Algorithms for Reward Weighting in Sparse Reward Robotic Manipulation Tasks Journal Article
In: IEEE Access, vol. 13, pp. 45544-45558, 2025, ISSN: 2169-3536.
Abstract | BibTeX | Tags: Machine Learning | Links:
@article{Fele2025,
title = {Curriculum Learning Algorithms for Reward Weighting in Sparse Reward Robotic Manipulation Tasks},
author = {Benjamin Fele and Jan Babi\v{c}},
doi = {10.1109/ACCESS.2025.3549639},
issn = {2169-3536},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {IEEE Access},
volume = {13},
pages = {45544-45558},
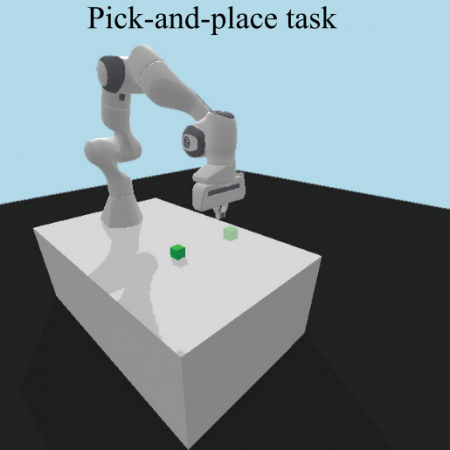
abstract = {Robotic learning from sparse rewards can be a considerable challenge due to large amounts of data required for mastering a task. We explore the application of curriculum learning (CL) algorithms for automatic reward weighting to tackle learning from sparse rewards in robotic pick-and-place and stacking tasks. We take several state-of-the-art CL algorithms that were originally designed to generate curriculum by manipulating the environment and appropriate them to weigh multiple sparse reward functions instead. The reward functions are chosen in a way that facilitates staged learning of the task, and the two robotic tasks are designed so that the agent learns to generalize to any initial and goal object position in the scene. The results of our three implemented CL algorithms show large improvement over the naive and state-of-the-art baselines in terms of speed of convergence to a successful policy in experiments with multiple task variations. Various generalization tests showcase some strengths and weaknesses of our approach. Inspection of changes in reward weight values during training further reveals varying curricula generated by the employed approaches, and showcases shifting emphasis from auxiliary to the main reward as the training progresses.},
keywords = {Machine Learning},
pubstate = {published},
tppubtype = {article}
}
Robotic learning from sparse rewards can be a considerable challenge due to large amounts of data required for mastering a task. We explore the application of curriculum learning (CL) algorithms for automatic reward weighting to tackle learning from sparse rewards in robotic pick-and-place and stacking tasks. We take several state-of-the-art CL algorithms that were originally designed to generate curriculum by manipulating the environment and appropriate them to weigh multiple sparse reward functions instead. The reward functions are chosen in a way that facilitates staged learning of the task, and the two robotic tasks are designed so that the agent learns to generalize to any initial and goal object position in the scene. The results of our three implemented CL algorithms show large improvement over the naive and state-of-the-art baselines in terms of speed of convergence to a successful policy in experiments with multiple task variations. Various generalization tests showcase some strengths and weaknesses of our approach. Inspection of changes in reward weight values during training further reveals varying curricula generated by the employed approaches, and showcases shifting emphasis from auxiliary to the main reward as the training progresses.
Kunavar, Tjasa; Kroflic, Niko; Jamšek, Marko; Babič, Jan
Influence of video gaming experience on motor adaptation during visuomotor and force field perturbations Journal Article
In: Heliyon, vol. 11, iss. 10, pp. e43109, 2025, ISSN: 24058440.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Kunavar2025,
title = {Influence of video gaming experience on motor adaptation during visuomotor and force field perturbations},
author = {Tjasa Kunavar and Niko Kroflic and Marko Jam\v{s}ek and Jan Babi\v{c}},
doi = {10.1016/j.heliyon.2025.e43109},
issn = {24058440},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Heliyon},
volume = {11},
issue = {10},
pages = {e43109},
abstract = {The capacity for quick and agile motor adaptations can be enhanced through related previous motor experience. This study explores the influence of prior long-term experience in playing action video games on the ability to adapt to novel motor beha viors. We compared motor adaptation between professional video game players, casual players who play video games on afrequent or infrequent basis, and non-gamers. Participants performed a tracking task where they had to adapt to novel visuomotor perturbation and an arm reaching task where they had to adapt to novel force field perturbation. Results showed that experience with action video games enhanced the process of adapting to novel complex visuomotor perturbation during a tracking task. On the other hand, the gaming experience had no effects on the process of adapting to force field perturbation during an arm reaching task. Since the tasks differ in the type of perturbation (and therefore the type of transformation needed for adaptation), the difficulty of perturbation, and the type of movement performed, the exact reason for the difference in the results should be further investigated. However, our results show that everyday experience with gaming can have an effect on the ability to adapt to certain types of novel motor behaviors. Our findings demonstrate the potential of everyday experiences in rehabilitation and training protocols, but highlight the need to consider the specific types of learning required.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The capacity for quick and agile motor adaptations can be enhanced through related previous motor experience. This study explores the influence of prior long-term experience in playing action video games on the ability to adapt to novel motor beha viors. We compared motor adaptation between professional video game players, casual players who play video games on afrequent or infrequent basis, and non-gamers. Participants performed a tracking task where they had to adapt to novel visuomotor perturbation and an arm reaching task where they had to adapt to novel force field perturbation. Results showed that experience with action video games enhanced the process of adapting to novel complex visuomotor perturbation during a tracking task. On the other hand, the gaming experience had no effects on the process of adapting to force field perturbation during an arm reaching task. Since the tasks differ in the type of perturbation (and therefore the type of transformation needed for adaptation), the difficulty of perturbation, and the type of movement performed, the exact reason for the difference in the results should be further investigated. However, our results show that everyday experience with gaming can have an effect on the ability to adapt to certain types of novel motor behaviors. Our findings demonstrate the potential of everyday experiences in rehabilitation and training protocols, but highlight the need to consider the specific types of learning required.
Sajko, Gal; Babič, Jan
Evidence accumulation with adaptive weighting of social and personal information for collective perception Journal Article
In: Swarm Intelligence, vol. 19, iss. 4, pp. 295-316, 2025, ISSN: 1935-3812.
Abstract | BibTeX | Tags: Swarm Robotics | Links:
@article{Sajko2025,
title = {Evidence accumulation with adaptive weighting of social and personal information for collective perception},
author = {Gal Sajko and Jan Babi\v{c}},
doi = {10.1007/s11721-025-00253-2},
issn = {1935-3812},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Swarm Intelligence},
volume = {19},
issue = {4},
pages = {295-316},
abstract = {This study advances collective perception in swarm robotics by introducing the Automated Swarm Opinion Diffusion Model (aSODM), which addresses the limitations of the original Swarm Opinion Diffusion Model (SODM). Both aSODM and SODM are evidence accumulation methods based on human-like decision-making processes. While SODM integrates social and personal information similarly to aSODM, its reliance on a manually predetermined social factor parameter limits its adaptability to diverse task difficulties. The Automated Swarm Opinion Diffusion Model eliminates this dependency by introducing an adaptive personal factor parameter, which automatically adjusts the weighting of personal and social information based on the information gathered about the environment. This automated approach improves robustness and reduces the dissemination of erroneous information in the early phases of a task. Comparative simulations against baseline methods (Voter Model and Majority Rule) demonstrate that aSODM enhances efficiency, particularly in tasks with higher difficulty levels. While aSODM outperforms SODM, its automated critical parameter selection makes it particularly well-suited for real-world applications where prior knowledge of the environment and task difficulty is lacking.},
keywords = {Swarm Robotics},
pubstate = {published},
tppubtype = {article}
}
This study advances collective perception in swarm robotics by introducing the Automated Swarm Opinion Diffusion Model (aSODM), which addresses the limitations of the original Swarm Opinion Diffusion Model (SODM). Both aSODM and SODM are evidence accumulation methods based on human-like decision-making processes. While SODM integrates social and personal information similarly to aSODM, its reliance on a manually predetermined social factor parameter limits its adaptability to diverse task difficulties. The Automated Swarm Opinion Diffusion Model eliminates this dependency by introducing an adaptive personal factor parameter, which automatically adjusts the weighting of personal and social information based on the information gathered about the environment. This automated approach improves robustness and reduces the dissemination of erroneous information in the early phases of a task. Comparative simulations against baseline methods (Voter Model and Majority Rule) demonstrate that aSODM enhances efficiency, particularly in tasks with higher difficulty levels. While aSODM outperforms SODM, its automated critical parameter selection makes it particularly well-suited for real-world applications where prior knowledge of the environment and task difficulty is lacking.
Jamšek, Marko; Oklobdžija, Lara Tušek; Vrabič, Rok; Babič, Jan
Implementation of Impedance Control for the EduExo Pro Exoskeleton Book Chapter
In: pp. 253-257, 2025.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inbook{Jamek2025,
title = {Implementation of Impedance Control for the EduExo Pro Exoskeleton},
author = {Marko Jam\v{s}ek and Lara Tu\v{s}ek Oklobd\v{z}ija and Rok Vrabi\v{c} and Jan Babi\v{c}},
doi = {10.1007/978-3-031-77588-8_50},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
pages = {253-257},
abstract = {This paper describes improvements to the EduExo Pro exoskeleton, emphasizing the introduction of impedance control with a Dynamixel servo motor and a Raspberry Pi. This upgrade enhances the system’s ability to support the development of advanced control algorithms, increasing its usefulness for educational purposes. Initial findings indicate a need for friction compensation due to the high gear reduction in the new motor setup. Nevertheless, the upgrades not only
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inbook}
}
This paper describes improvements to the EduExo Pro exoskeleton, emphasizing the introduction of impedance control with a Dynamixel servo motor and a Raspberry Pi. This upgrade enhances the system’s ability to support the development of advanced control algorithms, increasing its usefulness for educational purposes. Initial findings indicate a need for friction compensation due to the high gear reduction in the new motor setup. Nevertheless, the upgrades not only
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.
boost the functionality of the EduExo Pro but also extend its educational value, allowing the development of many differ-
ent control algorithms. Future work will aim to develop a gravity compensation algorithm with the included triple-axis
accelerometer to further refine the system’s performance.
Prange-Lasonder, Gerdienke B.; Oberschmidt, Kira; Pacifico, Ilaria; Jamšek, Marko; Babič, Jan; Masiero, Federico; Masia, Lorenzo; Smyrli, Katerina; Prinsen, Erik C.
User-Centered Design Approach for Development of an Assistive Soft Exosuit and Initial Results on User Requirements Book Chapter
In: pp. 63-67, 2025.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inbook{Prange-Lasonder2025,
title = {User-Centered Design Approach for Development of an Assistive Soft Exosuit and Initial Results on User Requirements},
author = {Gerdienke B. Prange-Lasonder and Kira Oberschmidt and Ilaria Pacifico and Marko Jam\v{s}ek and Jan Babi\v{c} and Federico Masiero and Lorenzo Masia and Katerina Smyrli and Erik C. Prinsen},
doi = {10.1007/978-3-031-77588-8_13},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
pages = {63-67},
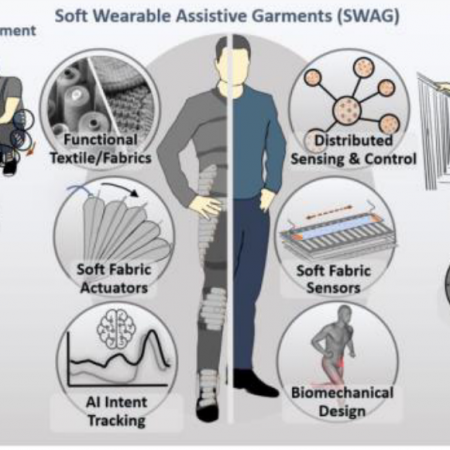
abstract = {To support, and potentially improve, gait-related tasks, wearable robots (WR) are promising, especially soft-WR.
To develop WR that are acceptable for their users, users need to be part of the design and development of WR. In the scope of the SWAG project, a pragmatic Human-Centered Design approach is adopted to develop a soft exosuit suitable for different applications. Accordingly, user requirements were elicited, first generally via a literature review, then specifically targeted towards SWAG via focus groups with users for each use case. Resulting user requirements feed into design and development of the exosuit, regarding the required support, modularity, donning/doffing, look and feel, and comfort. Next step is to test first mock-ups and pre-functional prototypes with users.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inbook}
}
To support, and potentially improve, gait-related tasks, wearable robots (WR) are promising, especially soft-WR.
To develop WR that are acceptable for their users, users need to be part of the design and development of WR. In the scope of the SWAG project, a pragmatic Human-Centered Design approach is adopted to develop a soft exosuit suitable for different applications. Accordingly, user requirements were elicited, first generally via a literature review, then specifically targeted towards SWAG via focus groups with users for each use case. Resulting user requirements feed into design and development of the exosuit, regarding the required support, modularity, donning/doffing, look and feel, and comfort. Next step is to test first mock-ups and pre-functional prototypes with users.
To develop WR that are acceptable for their users, users need to be part of the design and development of WR. In the scope of the SWAG project, a pragmatic Human-Centered Design approach is adopted to develop a soft exosuit suitable for different applications. Accordingly, user requirements were elicited, first generally via a literature review, then specifically targeted towards SWAG via focus groups with users for each use case. Resulting user requirements feed into design and development of the exosuit, regarding the required support, modularity, donning/doffing, look and feel, and comfort. Next step is to test first mock-ups and pre-functional prototypes with users.

Jamšek, Marko; Rueckert, Elmar; Babič, Jan
Step Length Prediction in Real Time Using Probabilistic Movement Primitives Proceedings Article
In: 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), pp. 814-820, IEEE, 2025, ISBN: 979-8-3315-9869-3.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling | Links:
@inproceedings{Jamek2025b,
title = {Step Length Prediction in Real Time Using Probabilistic Movement Primitives},
author = {Marko Jam\v{s}ek and Elmar Rueckert and Jan Babi\v{c}},
doi = {10.1109/Humanoids65713.2025.11203051},
isbn = {979-8-3315-9869-3},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids)},
pages = {814-820},
publisher = {IEEE},
abstract = {Accurately predicting where a person will place their foot during walking has practical value in applications that require close coordination between humans and machines, such as exoskeletons that adapt to a user\'s movement, or systems that detect and prevent trips and falls in real-world environments. Current methods often rely on complex models or offline analysis. In this paper, we present the use of probabilistic movement primitives (ProMPs) for predicting user step lengths in real time during walking on a treadmill. We used kinematic data acquired with an inertial measurement system to mimic data potentially gatherable from a wearable exoskeleton, avoiding the need for external motion capture. We evaluated the method with nine subjects walking on a treadmill. We show accurate prediction of user step length as early as 100 ms after movement onset during the foot\'s swing phase. This method could be extended and integrated with environmental monitoring systems to predict potential foot-obstacle collisions in real time.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
Accurately predicting where a person will place their foot during walking has practical value in applications that require close coordination between humans and machines, such as exoskeletons that adapt to a user's movement, or systems that detect and prevent trips and falls in real-world environments. Current methods often rely on complex models or offline analysis. In this paper, we present the use of probabilistic movement primitives (ProMPs) for predicting user step lengths in real time during walking on a treadmill. We used kinematic data acquired with an inertial measurement system to mimic data potentially gatherable from a wearable exoskeleton, avoiding the need for external motion capture. We evaluated the method with nine subjects walking on a treadmill. We show accurate prediction of user step length as early as 100 ms after movement onset during the foot's swing phase. This method could be extended and integrated with environmental monitoring systems to predict potential foot-obstacle collisions in real time.
Fele, Benjamin; Babič, Jan
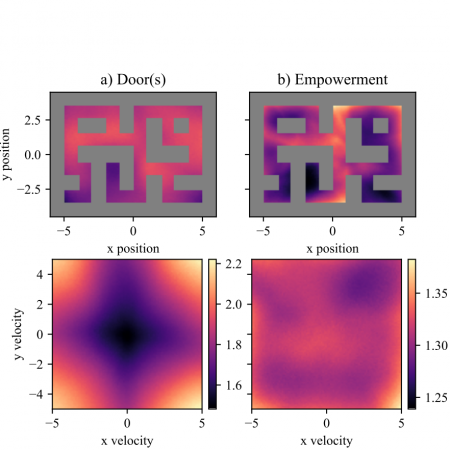
Door(s): Junction State Estimation for Efficient Exploration in Reinforcement Learning Proceedings Article
In: 9th Annual Conference on Robot Learning, 2025.
Abstract | BibTeX | Tags: Machine Learning | Links:
@inproceedings{Fele2025b,
title = {Door(s): Junction State Estimation for Efficient Exploration in Reinforcement Learning},
author = {Benjamin Fele and Jan Babi\v{c}},
url = {https://www.github.com/benquick123/doors.},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {9th Annual Conference on Robot Learning},
abstract = {Exploration is one of the important bottlenecks for efficient learning in reinforcement learning, especially in the presence of sparse rewards. One way to traverse the environment faster is by passing through junctions, or metaphorical doors, in the state space. We propose a novel heuristic, Door(s), focused on such narrow passages that serve as pathways to a large number of other states. Our approach works by estimating the state occupancy distribution and allows computation of its entropy, which forms the basis for our measure. Its computation is more sample-efficient compared to other similar methods and robustly works over longer horizons. Our results highlight the detection of dead-end states, show increased exploration efficiency, and demonstrate that Door(s) encodes specific behaviors useful for downstream learning of various robotic manipulation tasks. The code is available at https://www.github.com/benquick123/doors.},
keywords = {Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Exploration is one of the important bottlenecks for efficient learning in reinforcement learning, especially in the presence of sparse rewards. One way to traverse the environment faster is by passing through junctions, or metaphorical doors, in the state space. We propose a novel heuristic, Door(s), focused on such narrow passages that serve as pathways to a large number of other states. Our approach works by estimating the state occupancy distribution and allows computation of its entropy, which forms the basis for our measure. Its computation is more sample-efficient compared to other similar methods and robustly works over longer horizons. Our results highlight the detection of dead-end states, show increased exploration efficiency, and demonstrate that Door(s) encodes specific behaviors useful for downstream learning of various robotic manipulation tasks. The code is available at https://www.github.com/benquick123/doors.
2024
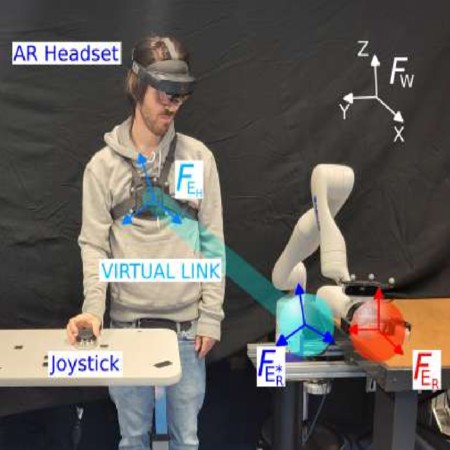
Poignant, Alexis; Jarrassé, Nathanaël; Morel, Guillaume
Hands-Free Teleoperation of a Nearby Manipulator Through a Virtual Body-to-Robot Link Proceedings Article
In: 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), pp. 619-626, 2024, ISSN: 2155-1782.
Abstract | BibTeX | Tags: Human Motor Control, Teleoperation | Links:
@inproceedings{10719920,
title = {Hands-Free Teleoperation of a Nearby Manipulator Through a Virtual Body-to-Robot Link},
author = {Alexis Poignant and Nathana\"{e}l Jarrass\'{e} and Guillaume Morel},
doi = {10.1109/BioRob60516.2024.10719920},
issn = {2155-1782},
year = {2024},
date = {2024-09-01},
urldate = {2024-09-01},
booktitle = {2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob)},
pages = {619-626},
abstract = {This paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot\'s end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot\'s workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental cam-paign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based tele-operation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compro-mise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies.},
keywords = {Human Motor Control, Teleoperation},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot's end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot's workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental cam-paign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based tele-operation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compro-mise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies.
White, Olivier; Dehouck, Victor; Boulanger, Nicolas; Dierick, Frédéric; Babič, Jan; Goswami, Nandu; Buisseret, Fabien
Resonance tuning of rhythmic movements is disrupted at short time scales: A centrifuge study Journal Article
In: iScience, vol. 27, iss. 5, pp. 109618, 2024, ISSN: 25890042.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning | Links:
@article{White2024,
title = {Resonance tuning of rhythmic movements is disrupted at short time scales: A centrifuge study},
author = {Olivier White and Victor Dehouck and Nicolas Boulanger and Fr\'{e}d\'{e}ric Dierick and Jan Babi\v{c} and Nandu Goswami and Fabien Buisseret},
doi = {10.1016/j.isci.2024.109618},
issn = {25890042},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {iScience},
volume = {27},
issue = {5},
pages = {109618},
abstract = {The human body exploits its neural mechanisms to optimize actions. Rhythmic movements are optimal when their frequency is close to the natural frequency of the system. In a pendulum, gravity modulates this spontaneous frequency. Participants unconsciously adjust their natural pace when cyclically moving the arm in altered gravity. However, the timescale of this adaptation is unexplored. Participants per- formed cyclic movements before, during, and after fast transitions between hypergravity levels (1g\textendash3g and 3g\textendash1g) induced by a human centrifuge. Movement periods were modulated with the average value of gravity during transitions. However, while participants increased movement pace on a cycle basis when gravity increased (1g\textendash3g), they did not decrease pace when gravity decreased (3g\textendash1g). We highlight asymmetric effects in the spontaneous adjustment of movement dynamics on short timescales, suggest- ing the involvement of cognitive factors, beyond standard dynamical models.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The human body exploits its neural mechanisms to optimize actions. Rhythmic movements are optimal when their frequency is close to the natural frequency of the system. In a pendulum, gravity modulates this spontaneous frequency. Participants unconsciously adjust their natural pace when cyclically moving the arm in altered gravity. However, the timescale of this adaptation is unexplored. Participants per- formed cyclic movements before, during, and after fast transitions between hypergravity levels (1g–3g and 3g–1g) induced by a human centrifuge. Movement periods were modulated with the average value of gravity during transitions. However, while participants increased movement pace on a cycle basis when gravity increased (1g–3g), they did not decrease pace when gravity decreased (3g–1g). We highlight asymmetric effects in the spontaneous adjustment of movement dynamics on short timescales, suggest- ing the involvement of cognitive factors, beyond standard dynamical models.

Kunavar, Tjasa; Jamšek, Marko; Avila-Mireles, Edwin Johnatan; Rueckert, Elmar; Peternel, Luka; Babič, Jan
The Effects of Different Motor Teaching Strategies on Learning a Complex Motor Task Journal Article
In: Sensors, vol. 24, iss. 4, pp. 1231, 2024, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Kunavar2024,
title = {The Effects of Different Motor Teaching Strategies on Learning a Complex Motor Task},
author = {Tjasa Kunavar and Marko Jam\v{s}ek and Edwin Johnatan Avila-Mireles and Elmar Rueckert and Luka Peternel and Jan Babi\v{c}},
doi = {10.3390/s24041231},
issn = {1424-8220},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Sensors},
volume = {24},
issue = {4},
pages = {1231},
abstract = {During the learning of a new sensorimotor task, individuals are usually provided with instructional stimuli and relevant information about the target task. The inclusion of haptic devices in the study of this kind of learning has greatly helped in the understanding of how an individual can improve or acquire new skills. However, the way in which the information and stimuli are delivered has not been extensively explored. We have designed a challenging task with nonintuitive visuomotor perturbation that allows us to apply and compare different motor strategies to study the teaching process and to avoid the interference of previous knowledge present in the na\"{i}ve subjects. Three subject groups participated in our experiment, where the learning by repetition without assistance, learning by repetition with assistance, and task Segmentation Learning techniques were performed with a haptic robot. Our results show that all the groups were able to successfully complete the task and that the subjects’ performance during training and evaluation was not affected by modifying the teaching strategy. Nevertheless, our results indicate that the presented task design is useful for the study of sensorimotor teaching and that the presented metrics are suitable for exploring the evolution of the accuracy and precision during learning.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
During the learning of a new sensorimotor task, individuals are usually provided with instructional stimuli and relevant information about the target task. The inclusion of haptic devices in the study of this kind of learning has greatly helped in the understanding of how an individual can improve or acquire new skills. However, the way in which the information and stimuli are delivered has not been extensively explored. We have designed a challenging task with nonintuitive visuomotor perturbation that allows us to apply and compare different motor strategies to study the teaching process and to avoid the interference of previous knowledge present in the naïve subjects. Three subject groups participated in our experiment, where the learning by repetition without assistance, learning by repetition with assistance, and task Segmentation Learning techniques were performed with a haptic robot. Our results show that all the groups were able to successfully complete the task and that the subjects’ performance during training and evaluation was not affected by modifying the teaching strategy. Nevertheless, our results indicate that the presented task design is useful for the study of sensorimotor teaching and that the presented metrics are suitable for exploring the evolution of the accuracy and precision during learning.
Díaz, María Alejandra; Bock, Sander De; Beckerle, Philipp; Babič, Jan; Verstraten, Tom; Pauw, Kevin De
Human-in-the-loop optimization of wearable device parameters using an EMG-based objective function Journal Article
In: Wearable Technologies, vol. 5, pp. e15, 2024.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control | Links:
@article{nokey,
title = {Human-in-the-loop optimization of wearable device parameters using an EMG-based objective function},
author = {Mar\'{i}a Alejandra D\'{i}az and Sander De Bock and Philipp Beckerle and Jan Babi\v{c} and Tom Verstraten and Kevin De Pauw},
url = {https://doi.org/10.1017/wtc.2024.9},
doi = {10.1017/wtc.2024.9},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Wearable Technologies},
volume = {5},
pages = {e15},
abstract = {Advancements in wearable robots aim to improve user motion, motor control, and overall experience by minimizing energetic cost (EC). However, EC is challenging to measure and it is typically indirectly estimated through respiratory gas analysis. This study introduces a novel EMG-based objective function that captures individuals\' natural energetic expenditure during walking. The objective function combines information from electromyography (EMG) variables such as intensity and muscle synergies. First, we demonstrate the similarity of the proposed objective function, calculated offline, to the EC during walking. Second, we minimize and validate the EMG-based objective function using an online Bayesian optimization algorithm. The walking step frequency is chosen as the parameter to optimize in both offline and online approaches in order to simplify experiments and facilitate comparisons with related research. Compared to existing studies that use EC as the objective function, results demonstrated that the optimization of the presented objective function reduced the number of iterations and, when compared with gradient descent optimization strategies, also reduced convergence time. Moreover, the algorithm effectively converges toward an optimal step frequency near the user\'s preferred frequency, positively influencing EC reduction. The good correlation between the estimated objective function and measured EC highlights its consistency and reliability. Thus, the proposed objective function could potentially optimize lower limb exoskeleton assistance and improve user performance and human-robot interaction without the need for challenging respiratory gas measurements. Impact Statement Wearable devices are important in assisting people, such as patients or older adults, during rehabilitation and everyday activities like walking. Some exoskeletons have been able to reduce the energy cost of walking. However, they require a cumbersome device to quantify it, making it impractical to use in real-life scenarios. Thus, we need to identify a way to assess energetic cost using wearable technologies. To address this, we introduced an EMG-based objective function that captures insights into energetic cost through muscle dynamics and motor coordination. Then, we minimized the proposed objective function online by optimizing walking step frequencies. We found that the EMG-based objective function highly correlates with energetic cost during walking. We also found that our algorithm effectively identifies an optimal step frequency that reduces participants\' energetic cost. These findings will facilitate the customization of the assistance in wearable assistive devices and its application in real situations.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Advancements in wearable robots aim to improve user motion, motor control, and overall experience by minimizing energetic cost (EC). However, EC is challenging to measure and it is typically indirectly estimated through respiratory gas analysis. This study introduces a novel EMG-based objective function that captures individuals' natural energetic expenditure during walking. The objective function combines information from electromyography (EMG) variables such as intensity and muscle synergies. First, we demonstrate the similarity of the proposed objective function, calculated offline, to the EC during walking. Second, we minimize and validate the EMG-based objective function using an online Bayesian optimization algorithm. The walking step frequency is chosen as the parameter to optimize in both offline and online approaches in order to simplify experiments and facilitate comparisons with related research. Compared to existing studies that use EC as the objective function, results demonstrated that the optimization of the presented objective function reduced the number of iterations and, when compared with gradient descent optimization strategies, also reduced convergence time. Moreover, the algorithm effectively converges toward an optimal step frequency near the user's preferred frequency, positively influencing EC reduction. The good correlation between the estimated objective function and measured EC highlights its consistency and reliability. Thus, the proposed objective function could potentially optimize lower limb exoskeleton assistance and improve user performance and human-robot interaction without the need for challenging respiratory gas measurements. Impact Statement Wearable devices are important in assisting people, such as patients or older adults, during rehabilitation and everyday activities like walking. Some exoskeletons have been able to reduce the energy cost of walking. However, they require a cumbersome device to quantify it, making it impractical to use in real-life scenarios. Thus, we need to identify a way to assess energetic cost using wearable technologies. To address this, we introduced an EMG-based objective function that captures insights into energetic cost through muscle dynamics and motor coordination. Then, we minimized the proposed objective function online by optimizing walking step frequencies. We found that the EMG-based objective function highly correlates with energetic cost during walking. We also found that our algorithm effectively identifies an optimal step frequency that reduces participants' energetic cost. These findings will facilitate the customization of the assistance in wearable assistive devices and its application in real situations.
Sorrentino, Riccardo G.; Avila‐Mireles, Edwin Johnatan; Babič, Jan; Supej, Matej; Mekjavic, Igor B.; McDonnell, Adam C.
Comparison of joint kinematics between upright front squat exercise and horizontal squat exercise performed on a short arm human centrifugation Journal Article
In: Physiological Reports, vol. 12, iss. 13, 2024, ISSN: 2051-817X.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Sorrentino2024,
title = {Comparison of joint kinematics between upright front squat exercise and horizontal squat exercise performed on a short arm human centrifugation},
author = {Riccardo G. Sorrentino and Edwin Johnatan Avila‐Mireles and Jan Babi\v{c} and Matej Supej and Igor B. Mekjavic and Adam C. McDonnell},
doi = {10.14814/phy2.16034},
issn = {2051-817X},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Physiological Reports},
volume = {12},
issue = {13},
abstract = {This study compared the joint kinematics between the front squat (FS) conducted in the upright (natural gravity) position and in the supine position on a short arm human centrifuge (SAHC). Male participants ( \<italic\>N\</italic\> = 12) with no prior experience exercising on a centrifuge completed a FS in the upright position before (PRE) and after (POST) a FS exercise conducted on the SAHC while exposed to artificial gravity (AG). Participants completed, in randomized order, three sets of six repetitions with a load equal to body weight or 1.25 × body weight for upright squats, and 1 g and 1.25 g at the center of gravity (COG) for AG. During the terrestrial squats, the load was applied with a barbell. Knee (left/right) and hip (left/right) flexion angles were recorded with a set of inertial measurement units. AG decreased the maximum flexion angle (MAX) of knees and hips as well as the range of motion (ROM), both at 1 and 1.25 g. Minor adaptation was observed between the first and the last repetition performed in AG. AG affects the ability to FS in na\"{i}ve participants by reducing MAX, MIN and ROM of the knees and hip.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
This study compared the joint kinematics between the front squat (FS) conducted in the upright (natural gravity) position and in the supine position on a short arm human centrifuge (SAHC). Male participants ( <italic>N</italic> = 12) with no prior experience exercising on a centrifuge completed a FS in the upright position before (PRE) and after (POST) a FS exercise conducted on the SAHC while exposed to artificial gravity (AG). Participants completed, in randomized order, three sets of six repetitions with a load equal to body weight or 1.25 × body weight for upright squats, and 1 g and 1.25 g at the center of gravity (COG) for AG. During the terrestrial squats, the load was applied with a barbell. Knee (left/right) and hip (left/right) flexion angles were recorded with a set of inertial measurement units. AG decreased the maximum flexion angle (MAX) of knees and hips as well as the range of motion (ROM), both at 1 and 1.25 g. Minor adaptation was observed between the first and the last repetition performed in AG. AG affects the ability to FS in naïve participants by reducing MAX, MIN and ROM of the knees and hip.

Tatarelli, Antonella; Babič, Jan; Casali, Carlo; Castiglia, Stefano Filippo; Chini, Giorgia; Ciancia, Rosanna; Cioffi, Ettore; Fiori, Lorenzo; Michieli, Mariagrazia; Montante, Barbara; Serrao, Mariano; Varrecchia, Tiwana; Ranavolo, Alberto
The Effect of a Wearable Assistive Trunk Exoskeleton on the Motor Coordination of People with Cerebellar Ataxia Journal Article
In: Applied Sciences, vol. 14, iss. 15, pp. 6537, 2024, ISSN: 2076-3417.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Postural Balance | Links:
@article{Tatarelli2024,
title = {The Effect of a Wearable Assistive Trunk Exoskeleton on the Motor Coordination of People with Cerebellar Ataxia},
author = {Antonella Tatarelli and Jan Babi\v{c} and Carlo Casali and Stefano Filippo Castiglia and Giorgia Chini and Rosanna Ciancia and Ettore Cioffi and Lorenzo Fiori and Mariagrazia Michieli and Barbara Montante and Mariano Serrao and Tiwana Varrecchia and Alberto Ranavolo},
doi = {10.3390/app14156537},
issn = {2076-3417},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Applied Sciences},
volume = {14},
issue = {15},
pages = {6537},
abstract = {The motor features of people with cerebellar ataxia suggest that locomotion is substantially impaired due to incoordination of the head, trunk, and limbs. The purpose of this study was to investigate how well a wearable soft passive exoskeleton worked for motor coordination in these patients. We used an optoelectronic system to examine the gait of nine ataxic people in three different conditions: without an exoskeleton and with two variants of the exoskeleton, one less and the other more flexible. We investigated kinematics using trunk ranges of motion, the displacement of the center of mass in the medio-lateral direction, and the parameters of mechanical energy consumption and recovery. Furthermore, we investigated the lower limb and trunk muscle coactivation. The results revealed a reduction of the medio-lateral sway of the center of mass, a more efficient behavior of the body in the antero-posterior direction, an energy expenditure optimization, a reduction of muscle coactivation and a better coordination between muscle activations. As a result, the findings laid the groundwork for the device to be used in the rehabilitation of individuals with cerebellar ataxia.},
keywords = {Ergonomy, Exoskeleton Design and Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The motor features of people with cerebellar ataxia suggest that locomotion is substantially impaired due to incoordination of the head, trunk, and limbs. The purpose of this study was to investigate how well a wearable soft passive exoskeleton worked for motor coordination in these patients. We used an optoelectronic system to examine the gait of nine ataxic people in three different conditions: without an exoskeleton and with two variants of the exoskeleton, one less and the other more flexible. We investigated kinematics using trunk ranges of motion, the displacement of the center of mass in the medio-lateral direction, and the parameters of mechanical energy consumption and recovery. Furthermore, we investigated the lower limb and trunk muscle coactivation. The results revealed a reduction of the medio-lateral sway of the center of mass, a more efficient behavior of the body in the antero-posterior direction, an energy expenditure optimization, a reduction of muscle coactivation and a better coordination between muscle activations. As a result, the findings laid the groundwork for the device to be used in the rehabilitation of individuals with cerebellar ataxia.

Jamšek, Marko; Sajko, Gal; Krpan, Jurij; Babič, Jan
Design and Control of a Climbing Robot for Autonomous Vertical Gardening Journal Article
In: Machines, vol. 12, iss. 2, pp. 141, 2024, ISSN: 2075-1702.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Robot Design | Links:
@article{nokey,
title = {Design and Control of a Climbing Robot for Autonomous Vertical Gardening},
author = {Marko Jam\v{s}ek and Gal Sajko and Jurij Krpan and Jan Babi\v{c}},
doi = {10.3390/machines12020141},
issn = {2075-1702},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Machines},
volume = {12},
issue = {2},
pages = {141},
abstract = {This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.},
keywords = {Compliance and Impedance Control, Kinematics, Robot Design},
pubstate = {published},
tppubtype = {article}
}
This paper focuses on the development of a novel climbing robot that is designed for autonomous maintenance of vertical gardens in urban environments. The robot, designed with a unique five-legged structure, is equipped with a range of electrical and mechanical components, enabling it to autonomously navigate and maintain a specially designed vertical garden wall facilitating interactive maintenance and growth monitoring. The motion planning and control of the robot were developed to ensure precise and adaptive movement across the vertical garden wall. Advanced algorithms were employed to manage the complex dynamics of the robot’s movements, optimizing its efficiency and effectiveness in navigating and maintaining the garden structure. The operation of the robot in maintaining the vertical garden was evaluated during a two-week trial where the robot successfully performed nearly 8000 leg movements, with only 0.6% requiring human intervention. This demonstrates a high level of autonomy and reliability. This study concludes that the pentapod robot demonstrates significant potential for automating the maintenance of vertical gardens, offering a promising tool for enhancing urban green spaces.
Sajko, Gal; Babič, Jan
Achieving Human-Inspired Drift Diffusion Consensus in Swarm Robotics Proceedings Article
In: Marco,; Leslie, Pérez Cáceres; Andreagiovanni, Reina; Jonas, Kuckling; Katharina, Kaiser Tanja; Mohammad, Soorati; Ken, Hasselmann; Heiko, Buss Eduard Hamann; Dorigo, (Ed.): Swarm Intelligence, pp. 29-41, Springer Nature Switzerland, 2024, ISBN: 978-3-031-70932-6.
Abstract | BibTeX | Tags: Swarm Robotics
@inproceedings{nokey,
title = {Achieving Human-Inspired Drift Diffusion Consensus in Swarm Robotics},
author = {Gal Sajko and Jan Babi\v{c}},
editor = {Marco and P\'{e}rez C\'{a}ceres Leslie and Reina Andreagiovanni and Kuckling Jonas and Kaiser Tanja Katharina and Soorati Mohammad and Hasselmann Ken and Buss Eduard Hamann Heiko and Dorigo},
isbn = {978-3-031-70932-6},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Swarm Intelligence},
pages = {29-41},
publisher = {Springer Nature Switzerland},
abstract = {We present a human inspired approach to collective decision-making in swarm robotics, leveraging a social drift diffusion model that models the decision making process of group of humans. We adapt its principles to robotic swarms to address collective perception tasks. Our method introduces the social factor parameter that allows direct control over the trade-off between decision speed and accuracy. It enables robotic swarms to reach consensus on environmental characteristics more efficiently, with the possibility to prioritize either speed or accuracy, depending on the task requirements. Experimental simulations across various environmental complexities demonstrate our method\'s superior performance compared to traditional algorithms like the voter model and majority rule. The results highlight the effectiveness of human-inspired decision-making mechanisms in enhancing the capabilities of swarm robotics.},
keywords = {Swarm Robotics},
pubstate = {published},
tppubtype = {inproceedings}
}
We present a human inspired approach to collective decision-making in swarm robotics, leveraging a social drift diffusion model that models the decision making process of group of humans. We adapt its principles to robotic swarms to address collective perception tasks. Our method introduces the social factor parameter that allows direct control over the trade-off between decision speed and accuracy. It enables robotic swarms to reach consensus on environmental characteristics more efficiently, with the possibility to prioritize either speed or accuracy, depending on the task requirements. Experimental simulations across various environmental complexities demonstrate our method's superior performance compared to traditional algorithms like the voter model and majority rule. The results highlight the effectiveness of human-inspired decision-making mechanisms in enhancing the capabilities of swarm robotics.
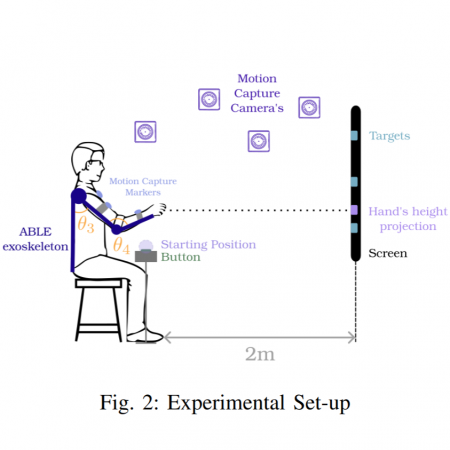
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Jarrassé, Nathanaël
Short term after-effects of small force fields applied by an upper-limb exoskeleton on inter-joint coordination Journal Article
In: IEEE International Conference on Robotics and Automation, pp. 959-965, 2024.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Physical Human Robot Interaction | Links:
@article{dubois2024Short,
title = {Short term after-effects of small force fields applied by an upper-limb exoskeleton on inter-joint coordination},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Nathana\"{e}l Jarrass\'{e}},
doi = {10.1109/ICRA57147.2024.10610645},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {IEEE International Conference on Robotics and Automation},
pages = {959-965},
abstract = {Exoskeleton technologies have numerous potential applications, ranging from improving human motor skills to aiding individuals in their daily activities. While exoskeletons are increasingly viewed, for example, as promising tools in industrial ergonomics, the effect of using them on human motor control, particularly on inter-joint coordination, remains relatively uncharted. This paper investigates the effects of generic low-amplitude force fields applied by an exoskeleton on motor strategies in asymptomatic users. The force fields mimic common perturbations encountered in exoskeletons, such as residual friction, over/under-tuned assistance, or structural elasticity. Fifty-five participants performed reaching tasks while connected to an arm exoskeleton, experiencing one of five tested force fields. Their movements before and after exposure to the exoskeleton force field were compared. The study focuses both on spatial and temporal changes in coordination using specific metrics. The results reveal that even brief exposure to a low- amplitude force field, or to uncompensated residual friction and dynamic forces, applied at the joint level can alter the interjoint coordination, while task performance remains unaffected. The tested force fields induced varying degrees of changes in joint contributions and synchronization. This study highlights the importance of monitoring coordination changes to fully understand the impact of exoskeletons on human motor control and thus enable safe and widespread adoption of those devices.},
keywords = {Human Motor Control, Kinematics, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Exoskeleton technologies have numerous potential applications, ranging from improving human motor skills to aiding individuals in their daily activities. While exoskeletons are increasingly viewed, for example, as promising tools in industrial ergonomics, the effect of using them on human motor control, particularly on inter-joint coordination, remains relatively uncharted. This paper investigates the effects of generic low-amplitude force fields applied by an exoskeleton on motor strategies in asymptomatic users. The force fields mimic common perturbations encountered in exoskeletons, such as residual friction, over/under-tuned assistance, or structural elasticity. Fifty-five participants performed reaching tasks while connected to an arm exoskeleton, experiencing one of five tested force fields. Their movements before and after exposure to the exoskeleton force field were compared. The study focuses both on spatial and temporal changes in coordination using specific metrics. The results reveal that even brief exposure to a low- amplitude force field, or to uncompensated residual friction and dynamic forces, applied at the joint level can alter the interjoint coordination, while task performance remains unaffected. The tested force fields induced varying degrees of changes in joint contributions and synchronization. This study highlights the importance of monitoring coordination changes to fully understand the impact of exoskeletons on human motor control and thus enable safe and widespread adoption of those devices.

Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Jarrassé, Nathanaël
Identifying individual characteristics influencing post-adaptation of motor behavior in upper-limb exoskeleton users Journal Article
In: IEEE-RAS International Conference on Humanoid Robots, pp. 359-366, 2024.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction | Links:
@article{dubois2024Identifying,
title = {Identifying individual characteristics influencing post-adaptation of motor behavior in upper-limb exoskeleton users},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Nathana\"{e}l Jarrass\'{e}},
doi = {10.1109/Humanoids58906.2024.10769945},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {IEEE-RAS International Conference on Humanoid Robots},
pages = {359-366},
abstract = {Over the past decade, industrial ergonomics have made significant advances, leading to the development of various occupational exoskeletons. While beneficial, exoskeletons could disrupt motor control due to their distributed interaction with the human body. This study explores individual factors influencing different adaptation patterns following exoskeleton use in asymptomatic individuals. Fifty-five participants used a 4 Degree of Freedom (DoF) arm exoskeleton to perform reaching tasks under low-magnitude force fields. Pre- and post-exposure movements were recorded via motion capture, and personal characteristics were documented. Spectral clustering identified variations in inter-joint coordination after exposition to the exoskeleton, and a random forest classifier linked these patterns to individual anthropometric, demographic and kinematic traits. The model highlighted factors such as laterality, forearm length, and some spontaneous kinematics metrics as key predictors of post-adaptation behavior. These findings underscore the need to consider individual profiles to minimize disruptive motor adaptations and improve exoskeleton safe widespread in industrial applications.},
keywords = {Human Motor Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Over the past decade, industrial ergonomics have made significant advances, leading to the development of various occupational exoskeletons. While beneficial, exoskeletons could disrupt motor control due to their distributed interaction with the human body. This study explores individual factors influencing different adaptation patterns following exoskeleton use in asymptomatic individuals. Fifty-five participants used a 4 Degree of Freedom (DoF) arm exoskeleton to perform reaching tasks under low-magnitude force fields. Pre- and post-exposure movements were recorded via motion capture, and personal characteristics were documented. Spectral clustering identified variations in inter-joint coordination after exposition to the exoskeleton, and a random forest classifier linked these patterns to individual anthropometric, demographic and kinematic traits. The model highlighted factors such as laterality, forearm length, and some spontaneous kinematics metrics as key predictors of post-adaptation behavior. These findings underscore the need to consider individual profiles to minimize disruptive motor adaptations and improve exoskeleton safe widespread in industrial applications.
2023
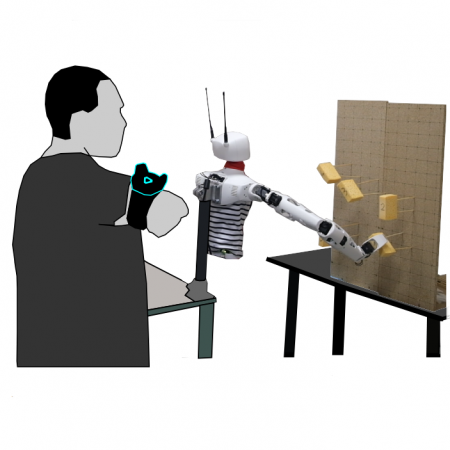
Segas, Effie; Mick, Sébastien; Leconte, Vincent; Dubois, Océane; Klotz, Rémi; Cattaert, Daniel; Rugy, Aymar
Intuitive movement-based prosthesis control enables arm amputees to reach naturally in virtual reality Journal Article
In: eLife, vol. 12, pp. RP87317, 2023, ISSN: 2050-084X.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Kinematics, Machine Learning | Links:
@article{segas2023intuitive,
title = {Intuitive movement-based prosthesis control enables arm amputees to reach naturally in virtual reality},
author = {Effie Segas and S\'{e}bastien Mick and Vincent Leconte and Oc\'{e}ane Dubois and R\'{e}mi Klotz and Daniel Cattaert and Aymar Rugy},
editor = {Kianoush Nazarpour and Tamar R Makin},
url = {https://doi.org/10.7554/eLife.87317},
doi = {10.7554/eLife.87317},
issn = {2050-084X},
year = {2023},
date = {2023-10-01},
urldate = {2023-10-01},
journal = {eLife},
volume = {12},
pages = {RP87317},
publisher = {eLife Sciences Publications, Ltd},
abstract = {Impressive progress is being made in bionic limbs design and control. Yet, controlling the numerous joints of a prosthetic arm necessary to place the hand at a correct position and orientation to grasp objects remains challenging. Here, we designed an intuitive, movement-based prosthesis control that leverages natural arm coordination to predict distal joints missing in people with transhumeral limb loss based on proximal residual limb motion and knowledge of the movement goal. This control was validated on 29 participants, including seven with above-elbow limb loss, who picked and placed bottles in a wide range of locations in virtual reality, with median success rates over 99% and movement times identical to those of natural movements. This control also enabled 15 participants, including three with limb differences, to reach and grasp real objects with a robotic arm operated according to the same principle. Remarkably, this was achieved without any prior training, indicating that this control is intuitive and instantaneously usable. It could be used for phantom limb pain management in virtual reality, or to augment the reaching capabilities of invasive neural interfaces usually more focused on hand and grasp control.},
keywords = {Human-in-the-Loop Control, Kinematics, Machine Learning},
pubstate = {published},
tppubtype = {article}
}
Impressive progress is being made in bionic limbs design and control. Yet, controlling the numerous joints of a prosthetic arm necessary to place the hand at a correct position and orientation to grasp objects remains challenging. Here, we designed an intuitive, movement-based prosthesis control that leverages natural arm coordination to predict distal joints missing in people with transhumeral limb loss based on proximal residual limb motion and knowledge of the movement goal. This control was validated on 29 participants, including seven with above-elbow limb loss, who picked and placed bottles in a wide range of locations in virtual reality, with median success rates over 99% and movement times identical to those of natural movements. This control also enabled 15 participants, including three with limb differences, to reach and grasp real objects with a robotic arm operated according to the same principle. Remarkably, this was achieved without any prior training, indicating that this control is intuitive and instantaneously usable. It could be used for phantom limb pain management in virtual reality, or to augment the reaching capabilities of invasive neural interfaces usually more focused on hand and grasp control.
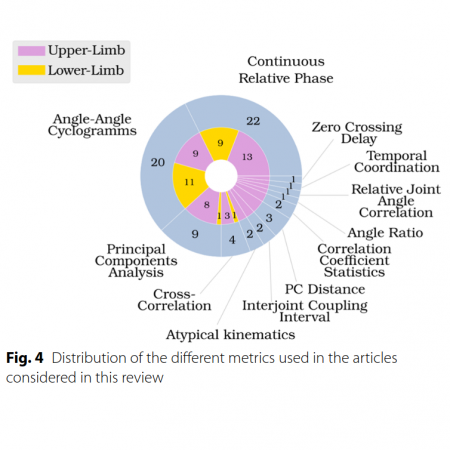
Dubois, Océane; Roby-Brami, Agnès; Parry, Ross; Khoramshahi, Mahdi; Jarrassé, Nathanaël
A guide to inter-joint coordination characterization for discrete movements: a comparative study Journal Article
In: Journal of NeuroEngineering and Rehabilitation, vol. 20, no. 1, pp. 132, 2023, ISSN: 1743-0003.
Abstract | BibTeX | Tags: Dynamic Motion, Kinematics | Links:
@article{dubois2023Guide,
title = {A guide to inter-joint coordination characterization for discrete movements: a comparative study},
author = {Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Ross Parry and Mahdi Khoramshahi and Nathana\"{e}l Jarrass\'{e}},
url = {https://doi.org/10.1186/s12984-023-01252-2},
doi = {10.1186/s12984-023-01252-2},
issn = {1743-0003},
year = {2023},
date = {2023-09-30},
urldate = {2023-09-30},
journal = {Journal of NeuroEngineering and Rehabilitation},
volume = {20},
number = {1},
pages = {132},
abstract = {Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results.},
keywords = {Dynamic Motion, Kinematics},
pubstate = {published},
tppubtype = {article}
}
Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results.
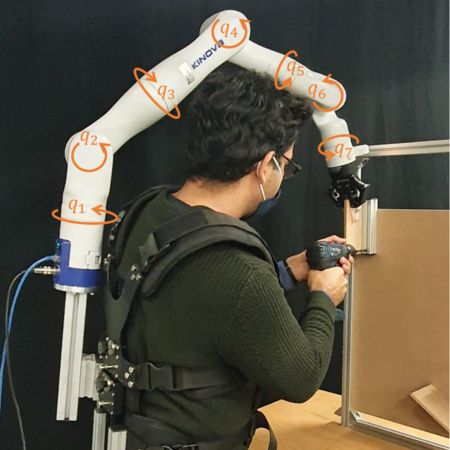
Khoramshahi, Mahdi; Poignant, Alexis; Morel, Guillaume; Jarrassé, Nathanael
A Practical Control Approach for Safe Collaborative Supernumerary Robotic Arms Proceedings Article
In: 2023 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), pp. 147-152, 2023, ISSN: 2162-7576.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@inproceedings{10187452,
title = {A Practical Control Approach for Safe Collaborative Supernumerary Robotic Arms},
author = {Mahdi Khoramshahi and Alexis Poignant and Guillaume Morel and Nathanael Jarrass\'{e}},
doi = {10.1109/ARSO56563.2023.10187452},
issn = {2162-7576},
year = {2023},
date = {2023-06-01},
urldate = {2023-06-01},
booktitle = {2023 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO)},
pages = {147-152},
abstract = {Supernumerary robotic arms have a high potential to increase human capacities to perform complicated tasks; e.g., having a third arm could increase the user\'s strength, precision, reachability, and versatility. However, having a robotic manipulator working in extreme proximity to the user raises new challenges in terms of safety; i.e., uncontrolled and hazardous collisions with the user\'s body parts and the environment. In this preliminary work, we show that most of these safety considerations can be extracted from standardized norms and translated into kinematics constraints for the robot. Thus, we propose a quadratic programming approach to achieve safe inverse-kinematics and physical interaction for supernumerary arms. We validate our approach in designing a safe supernumerary arm using the 7-Dof Kinova® Gen3 robot.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Supernumerary robotic arms have a high potential to increase human capacities to perform complicated tasks; e.g., having a third arm could increase the user's strength, precision, reachability, and versatility. However, having a robotic manipulator working in extreme proximity to the user raises new challenges in terms of safety; i.e., uncontrolled and hazardous collisions with the user's body parts and the environment. In this preliminary work, we show that most of these safety considerations can be extracted from standardized norms and translated into kinematics constraints for the robot. Thus, we propose a quadratic programming approach to achieve safe inverse-kinematics and physical interaction for supernumerary arms. We validate our approach in designing a safe supernumerary arm using the 7-Dof Kinova® Gen3 robot.
Dežman, Miha; Massardi, Stefano; Pinto-Fernandez, David; Grosu, Victor; Rodriguez-Guerrero, Carlos; Babič, Jan; Torricelli, Diego
A mechatronic leg replica to benchmark human–exoskeleton physical interactions Journal Article
In: Bioinspiration & Biomimetics, vol. 18, iss. 3, pp. 036009, 2023, ISSN: 1748-3182.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design | Links:
@article{dezman2023,
title = {A mechatronic leg replica to benchmark human\textendashexoskeleton physical interactions},
author = {Miha De\v{z}man and Stefano Massardi and David Pinto-Fernandez and Victor Grosu and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Diego Torricelli},
doi = {10.1088/1748-3190/accda8},
issn = {1748-3182},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Bioinspiration \& Biomimetics},
volume = {18},
issue = {3},
pages = {036009},
abstract = {Evaluating human\textendashexoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Evaluating human–exoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.
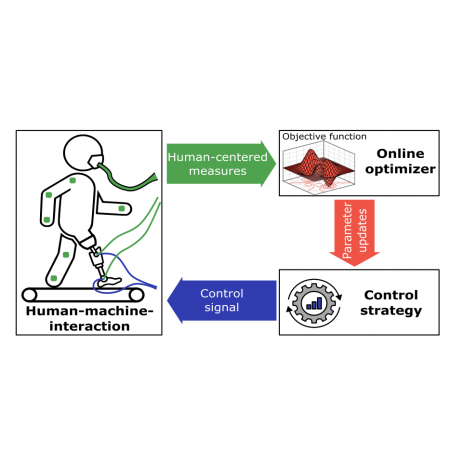
Díaz, María Alejandra; Voß, Matthias; Dillen, Arnau; Tassignon, Bruno; Flynn, Louis; Geeroms, Joost; Meeusen, Romain; Verstraten, Tom; Babič, Jan; Beckerle, Philipp; Pauw, Kevin De
Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human–Robot Interaction: A Systematic Review Journal Article
In: IEEE Transactions on Cybernetics, vol. 53, iss. 12, pp. 7483-7496, 2023, ISSN: 2168-2267.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Diaz2023b,
title = {Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human\textendashRobot Interaction: A Systematic Review},
author = {Mar\'{i}a Alejandra D\'{i}az and Matthias Vo\ss and Arnau Dillen and Bruno Tassignon and Louis Flynn and Joost Geeroms and Romain Meeusen and Tom Verstraten and Jan Babi\v{c} and Philipp Beckerle and Kevin De Pauw},
url = {https://ieeexplore.ieee.org/document/9994612/},
doi = {10.1109/TCYB.2022.3224895},
issn = {2168-2267},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {IEEE Transactions on Cybernetics},
volume = {53},
issue = {12},
pages = {7483-7496},
abstract = {This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human\textendashrobot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human\textendashmachine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human–robot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human–machine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.
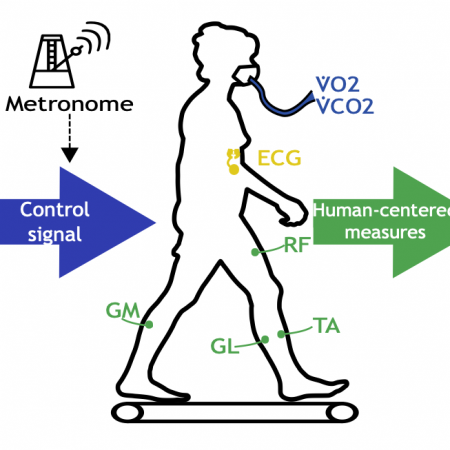
Diaz, Maria Alejandra; Bock, Sander De; Beckerle, Philipp; Babič, Jan; Verstraten, Tom; Pauw, Kevin De
An EMG-Based Objective Function for Human-in-the-Loop Optimization. Proceedings Article
In: 2023 International Conference on Rehabilitation Robotics (ICORR), pp. 1-6, IEEE, 2023, ISSN: 1945-7901.
Abstract | BibTeX | Tags: Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control | Links:
@inproceedings{Diaz2023,
title = {An EMG-Based Objective Function for Human-in-the-Loop Optimization.},
author = {Maria Alejandra Diaz and Sander De Bock and Philipp Beckerle and Jan Babi\v{c} and Tom Verstraten and Kevin De Pauw},
doi = {10.1109/ICORR58425.2023.10304819},
issn = {1945-7901},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 International Conference on Rehabilitation Robotics (ICORR)},
journal = {IEEE ... International Conference on Rehabilitation Robotics : [proceedings]},
volume = {2023},
pages = {1-6},
publisher = {IEEE},
abstract = {Advancements in wearable robots aim to improve the users' motion, performance, and comfort by optimizing, mainly, energetic cost (EC). However, EC is a noisy measurement with a physiological delayed response that requires long evaluation periods and wearing an uncomfortable mask. This study aims to estimate and minimize an EMG-based objective function that describes the natural energetic expenditure of individuals walking. This objective is assessed by combining multiple electromyography (EMG) variables from the EMG intensity and muscle synergies. To evaluate this objective function simply and repeatedly, we prescribed step frequency (SF) via a metronome and optimized this frequency to minimize muscle activity demands. Further, a linear mixed-effects model was fitted for EC, with the EMG variables as fixed-effects and a random intercept that varies by participant. After the model was fitted to the data, a cubic polynomial was used to identify the optimal SF that reduces the overall EMG-based objective function. Our analysis outlines that the proposed objective function is comparable to the EC during walking, the primary objective function used in human-in-the-loop optimization. Thus, this EMG-based objective function could be potentially used to optimize wearable robots and improve human-robot interaction.},
keywords = {Human Performance Augmentation, Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
Advancements in wearable robots aim to improve the users' motion, performance, and comfort by optimizing, mainly, energetic cost (EC). However, EC is a noisy measurement with a physiological delayed response that requires long evaluation periods and wearing an uncomfortable mask. This study aims to estimate and minimize an EMG-based objective function that describes the natural energetic expenditure of individuals walking. This objective is assessed by combining multiple electromyography (EMG) variables from the EMG intensity and muscle synergies. To evaluate this objective function simply and repeatedly, we prescribed step frequency (SF) via a metronome and optimized this frequency to minimize muscle activity demands. Further, a linear mixed-effects model was fitted for EC, with the EMG variables as fixed-effects and a random intercept that varies by participant. After the model was fitted to the data, a cubic polynomial was used to identify the optimal SF that reduces the overall EMG-based objective function. Our analysis outlines that the proposed objective function is comparable to the EC during walking, the primary objective function used in human-in-the-loop optimization. Thus, this EMG-based objective function could be potentially used to optimize wearable robots and improve human-robot interaction.
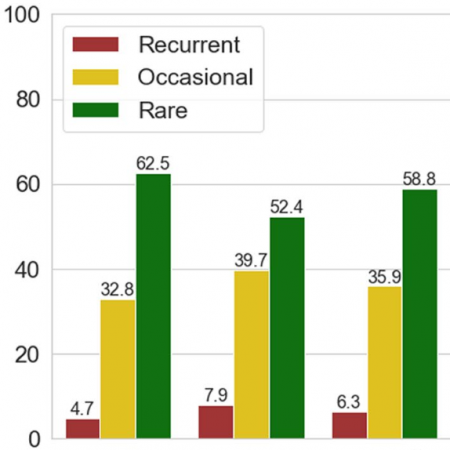
Massardi, Stefano; Pinto-Fernandez, David; Babič, Jan; Dežman, Miha; Trošt, Andrej; Grosu, Victor; Lefeber, Dirk; Rodriguez, Carlos; Bessler, Jule; Schaake, Leendert; Prange-Lasonder, Gerdienke; Veneman, Jan F.; Torricelli, Diego
Relevance of hazards in exoskeleton applications: a survey-based enquiry Journal Article
In: Journal of NeuroEngineering and Rehabilitation, vol. 20, iss. 1, pp. 68, 2023, ISSN: 1743-0003.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Massardi2023,
title = {Relevance of hazards in exoskeleton applications: a survey-based enquiry},
author = {Stefano Massardi and David Pinto-Fernandez and Jan Babi\v{c} and Miha De\v{z}man and Andrej Tro\v{s}t and Victor Grosu and Dirk Lefeber and Carlos Rodriguez and Jule Bessler and Leendert Schaake and Gerdienke Prange-Lasonder and Jan F. Veneman and Diego Torricelli},
doi = {10.1186/s12984-023-01191-y},
issn = {1743-0003},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Journal of NeuroEngineering and Rehabilitation},
volume = {20},
issue = {1},
pages = {68},
abstract = {Exoskeletons are becoming the reference technology for assistance and augmentation of human motor functions in a wide range of application domains. Unfortunately, the exponential growth of this sector has not been accompanied by a rigorous risk assessment (RA) process, which is necessary to identify the major aspects concerning the safety and impact of this new technology on humans. This situation may seriously hamper the market uptake of new products. This paper presents the results of a survey that was circulated to understand how hazards are considered by exoskeleton users, from research and industry perspectives. Our analysis aimed to identify the perceived occurrence and the impact of a sample of generic hazards, as well as to collect suggestions and general opinions from the respondents that can serve as a reference for more targeted RA. Our results identified a list of relevant hazards for exoskeletons. Among them, misalignments and unintended device motion were perceived as key aspects for exoskeletons’ safety. This survey aims to represent a first attempt in recording overall feedback from the community and contribute to future RAs and the identification of better mitigation strategies in the field.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
Exoskeletons are becoming the reference technology for assistance and augmentation of human motor functions in a wide range of application domains. Unfortunately, the exponential growth of this sector has not been accompanied by a rigorous risk assessment (RA) process, which is necessary to identify the major aspects concerning the safety and impact of this new technology on humans. This situation may seriously hamper the market uptake of new products. This paper presents the results of a survey that was circulated to understand how hazards are considered by exoskeleton users, from research and industry perspectives. Our analysis aimed to identify the perceived occurrence and the impact of a sample of generic hazards, as well as to collect suggestions and general opinions from the respondents that can serve as a reference for more targeted RA. Our results identified a list of relevant hazards for exoskeletons. Among them, misalignments and unintended device motion were perceived as key aspects for exoskeletons’ safety. This survey aims to represent a first attempt in recording overall feedback from the community and contribute to future RAs and the identification of better mitigation strategies in the field.
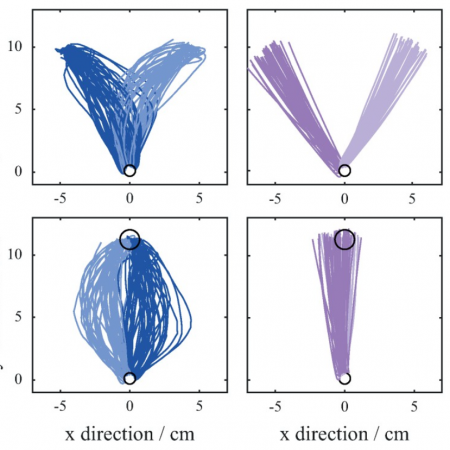
Kunavar, Tjasa; Cheng, Xiaoxiao; Franklin, David W.; Burdet, Etienne; Babič, Jan
Explicit learning based on reward prediction error facilitates agile motor adaptations Journal Article
In: PLOS ONE, vol. 18, iss. 12, pp. e0295274, 2023, ISSN: 1932-6203.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control | Links:
@article{Kunavar2023,
title = {Explicit learning based on reward prediction error facilitates agile motor adaptations},
author = {Tjasa Kunavar and Xiaoxiao Cheng and David W. Franklin and Etienne Burdet and Jan Babi\v{c}},
doi = {10.1371/journal.pone.0295274},
issn = {1932-6203},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {PLOS ONE},
volume = {18},
issue = {12},
pages = {e0295274},
abstract = {Error based motor learning can be driven by both sensory prediction error and reward prediction error. Learning based on sensory prediction error is termed sensorimotor adaptation, while learning based on reward prediction error is termed reward learning. To investigate the characteristics and differences between sensorimotor adaptation and reward learning, we adapted a visuomotor paradigm where subjects performed arm movements while presented with either the sensory prediction error, signed end-point error, or binary reward. Before each trial, perturbation indicators in the form of visual cues were presented to inform the subjects of the presence and direction of the perturbation. To analyse the interconnection between sensorimotor adaptation and reward learning, we designed a computational model that distinguishes between the two prediction errors. Our results indicate that subjects adapted to novel perturbations irrespective of the type of prediction error they received during learning, and they converged towards the same movement patterns. Sensorimotor adaptations led to a pronounced aftereffect, while adaptation based on reward consequences produced smaller aftereffects suggesting that reward learning does not alter the internal model to the same degree as sensorimotor adaptation. Even though all subjects had learned to counteract two different perturbations separately, only those who relied on explicit learning using reward prediction error could timely adapt to the randomly changing perturbation. The results from the computational model suggest that sensorimotor and reward learning operate through distinct adaptation processes and that only sensorimotor adaptation changes the internal model, whereas reward learning employs explicit strategies that do not result in aftereffects. Additionally, we demonstrate that when humans learn motor tasks, they utilize both learning processes to successfully adapt to the new environments.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Error based motor learning can be driven by both sensory prediction error and reward prediction error. Learning based on sensory prediction error is termed sensorimotor adaptation, while learning based on reward prediction error is termed reward learning. To investigate the characteristics and differences between sensorimotor adaptation and reward learning, we adapted a visuomotor paradigm where subjects performed arm movements while presented with either the sensory prediction error, signed end-point error, or binary reward. Before each trial, perturbation indicators in the form of visual cues were presented to inform the subjects of the presence and direction of the perturbation. To analyse the interconnection between sensorimotor adaptation and reward learning, we designed a computational model that distinguishes between the two prediction errors. Our results indicate that subjects adapted to novel perturbations irrespective of the type of prediction error they received during learning, and they converged towards the same movement patterns. Sensorimotor adaptations led to a pronounced aftereffect, while adaptation based on reward consequences produced smaller aftereffects suggesting that reward learning does not alter the internal model to the same degree as sensorimotor adaptation. Even though all subjects had learned to counteract two different perturbations separately, only those who relied on explicit learning using reward prediction error could timely adapt to the randomly changing perturbation. The results from the computational model suggest that sensorimotor and reward learning operate through distinct adaptation processes and that only sensorimotor adaptation changes the internal model, whereas reward learning employs explicit strategies that do not result in aftereffects. Additionally, we demonstrate that when humans learn motor tasks, they utilize both learning processes to successfully adapt to the new environments.
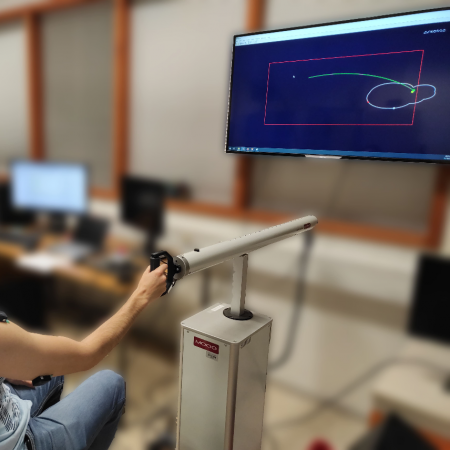
Escarabajal, Rafael J.; París, Elena; Petrič, Tadej; Valera, Ángel; Mata, Vicente; Babič, Jan
Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes Proceedings Article
In: 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1-8, IEEE, 2023, ISBN: 979-8-3503-2570-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics | Links:
@inproceedings{Escarabajal2023,
title = {Assistive Upper-Limb Control using a Novel Measure of Human Muscular Manipulability based on Force Envelopes},
author = {Rafael J. Escarabajal and Elena Par\'{i}s and Tadej Petri\v{c} and \'{A}ngel Valera and Vicente Mata and Jan Babi\v{c}},
doi = {10.1109/ROBIO58561.2023.10354618},
isbn = {979-8-3503-2570-6},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
pages = {1-8},
publisher = {IEEE},
abstract = {This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human-in-the-Loop Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a novel approach to measur- ing upper limb muscular manipulability considering human biomechanics. We address the limitations of classical manipu- lability measures in robotics when applied to the human body. Our method introduces the concept of a force envelope to estimate the capability of the human arm to exert forces in dif- ferent directions, considering the contributions of the muscles. To achieve this, we employed a biomechanical model based on Hill’s muscle model, calibrated using both geometric (segmental lengths) and strength-based (muscle activation) approaches to adapt to individual users. Furthermore, we designed a control algorithm that enables a robotic device to assist the user in unfavorable directions, guided by the manipulability measure. By providing a more isotropic response, the robotic device compensates for low manipulability in certain regions of the workspace. We conducted experiments using a haptic robot in admittance mode along the sagittal plane, where a viscous envi- ronment acted as a load to hinder human movement throughout the workspace. Our results demonstrate the effectiveness of the proposed method in reducing human effort by assisting in less manipulable directions while leaving high manipulability directions unassisted. Additionally, we successfully verified the superiority in performance of our novel approach against existing methods.
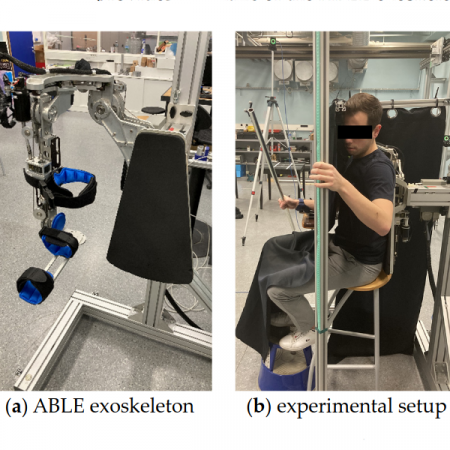
Arcangeli, Dorine; Dubois, Océane; Roby-Brami, Agnès; Famié, Sylvain; Marco, Giovanni; Arnold, Gabriel; Jarrassé, Nathanaël; Parry, Ross
Human Exteroception during Object Handling with an Upper Limb Exoskeleton Journal Article
In: Sensors, vol. 23, no. 11, 2023, ISSN: 1424-8220.
Abstract | BibTeX | Tags: | Links:
@article{arcangeli2023Human,
title = {Human Exteroception during Object Handling with an Upper Limb Exoskeleton},
author = {Dorine Arcangeli and Oc\'{e}ane Dubois and Agn\`{e}s Roby-Brami and Sylvain Fami\'{e} and Giovanni Marco and Gabriel Arnold and Nathana\"{e}l Jarrass\'{e} and Ross Parry},
url = {https://www.mdpi.com/1424-8220/23/11/5158},
doi = {10.3390/s23115158},
issn = {1424-8220},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Sensors},
volume = {23},
number = {11},
abstract = {Upper limb exoskeletons may confer significant mechanical advantages across a range of tasks. The potential consequences of the exoskeleton upon the user’s sensorimotor capacities however, remain poorly understood. The purpose of this study was to examine how the physical coupling of the user’s arm to an upper limb exoskeleton influenced the perception of handheld objects. In the experimental protocol, participants were required to estimate the length of a series of bars held in their dominant right hand, in the absence of visual feedback. Their performance in conditions with an exoskeleton fixed to the forearm and upper arm was compared to conditions without the upper limb exoskeleton. Experiment 1 was designed to verify the effects of attaching an exoskeleton to the upper limb, with object handling limited to rotations of the wrist only. Experiment 2 was designed to verify the effects of the structure, and its mass, with combined movements of the wrist, elbow, and shoulder. Statistical analysis indicated that movements performed with the exoskeleton did not significantly affect perception of the handheld object in experiment 1 (BF01 = 2.3) or experiment 2 (BF01 = 4.3). These findings suggest that while the integration of an exoskeleton complexifies the architecture of the upper limb effector, this does not necessarily impede transmission of the mechanical information required for human exteroception.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Upper limb exoskeletons may confer significant mechanical advantages across a range of tasks. The potential consequences of the exoskeleton upon the user’s sensorimotor capacities however, remain poorly understood. The purpose of this study was to examine how the physical coupling of the user’s arm to an upper limb exoskeleton influenced the perception of handheld objects. In the experimental protocol, participants were required to estimate the length of a series of bars held in their dominant right hand, in the absence of visual feedback. Their performance in conditions with an exoskeleton fixed to the forearm and upper arm was compared to conditions without the upper limb exoskeleton. Experiment 1 was designed to verify the effects of attaching an exoskeleton to the upper limb, with object handling limited to rotations of the wrist only. Experiment 2 was designed to verify the effects of the structure, and its mass, with combined movements of the wrist, elbow, and shoulder. Statistical analysis indicated that movements performed with the exoskeleton did not significantly affect perception of the handheld object in experiment 1 (BF01 = 2.3) or experiment 2 (BF01 = 4.3). These findings suggest that while the integration of an exoskeleton complexifies the architecture of the upper limb effector, this does not necessarily impede transmission of the mechanical information required for human exteroception.
2022
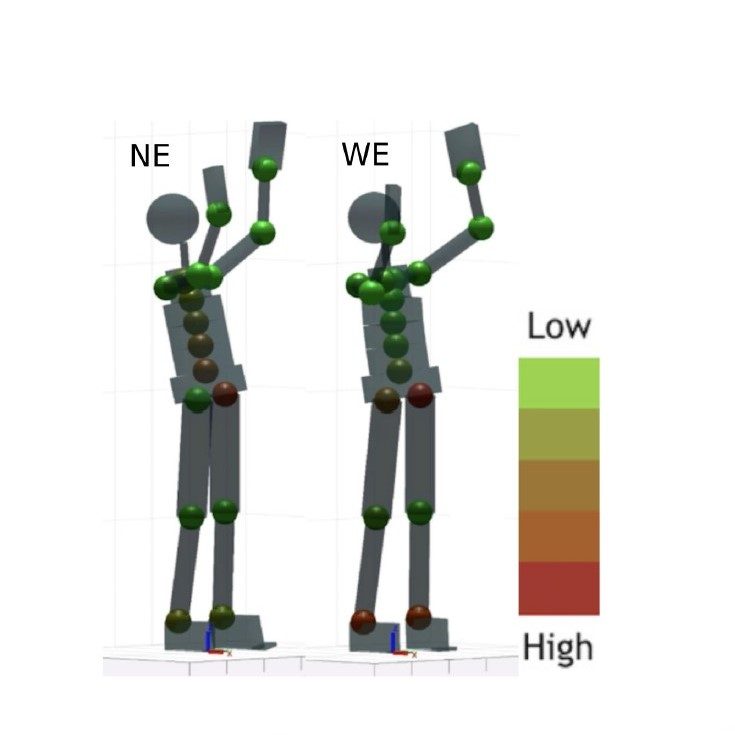
Latella, Claudia; Tirupachuri, Yeshasvi; Tagliapietra, Luca; Rapetti, Lorenzo; Schirrmeister, Benjamin; Bornmann, Jonas; Gorjan, Dasa; Čamernik, Jernej; Maurice, Pauline; Fritzsche, Lars; Gonzalez-Vargas, Jose; Ivaldi, Serena; Babič, Jan; Nori, Francesco; Pucci, Daniele
Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 52, no. 5, pp. 1060–1068, 2022, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction | Links:
@article{Latella2022,
title = {Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton},
author = {Claudia Latella and Yeshasvi Tirupachuri and Luca Tagliapietra and Lorenzo Rapetti and Benjamin Schirrmeister and Jonas Bornmann and Dasa Gorjan and Jernej \v{C}amernik and Pauline Maurice and Lars Fritzsche and Jose Gonzalez-Vargas and Serena Ivaldi and Jan Babi\v{c} and Francesco Nori and Daniele Pucci},
url = {https://ieeexplore.ieee.org/document/9647004/},
doi = {10.1109/THMS.2021.3128892},
issn = {2168-2291},
year = {2022},
date = {2022-10-01},
urldate = {2022-10-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {52},
number = {5},
pages = {1060--1068},
publisher = {IEEE},
abstract = {Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.
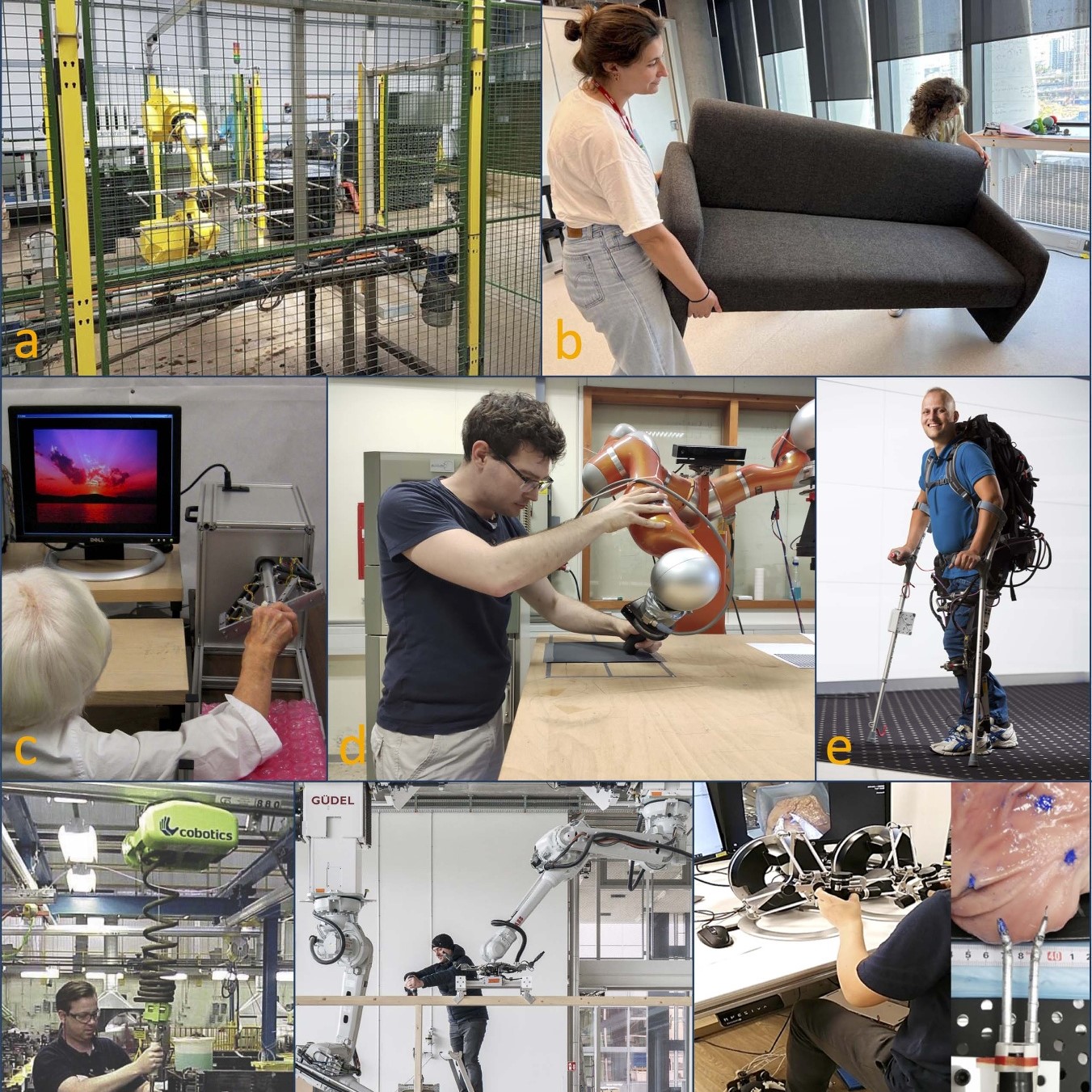
Li, Yanan; Sena, Aran; Wang, Ziwei; Xing, Xueyan; Babič, Jan; Asseldonk, Edwin; Burdet, Etienne
A review on interaction control for contact robots through intent detection Journal Article
In: Progress in Biomedical Engineering, vol. 4, no. 3, pp. 032004, 2022, ISSN: 2516-1091.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Li2022,
title = {A review on interaction control for contact robots through intent detection},
author = {Yanan Li and Aran Sena and Ziwei Wang and Xueyan Xing and Jan Babi\v{c} and Edwin Asseldonk and Etienne Burdet},
url = {https://iopscience.iop.org/article/10.1088/2516-1091/ac8193},
doi = {10.1088/2516-1091/ac8193},
issn = {2516-1091},
year = {2022},
date = {2022-07-01},
urldate = {2022-07-01},
journal = {Progress in Biomedical Engineering},
volume = {4},
number = {3},
pages = {032004},
abstract = {Interaction control presents opportunities for contact robots physically interacting with their human user, such as assistance targeted to each human user, communication of goals to enable effective teamwork, and task-directed motion resistance in physical training and rehabilitation contexts. Here we review the burgeoning field of interaction control in the control theory and machine learning communities, by analysing the exchange of haptic information between the robot and its human user, and how they share the task effort. We first review the estimation and learning methods to predict the human user intent with the large uncertainty, variability and noise and limited observation of human motion. Based on this motion intent core, typical interaction control strategies are described using a homotopy of shared control parameters. Recent methods of haptic communication and game theory are then presented to consider the co-adaptation of human and robot control and yield versatile interactive control as observed between humans. Finally, the limitations of the presented state of the art are discussed and directions for future research are outlined.},
keywords = {Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Interaction control presents opportunities for contact robots physically interacting with their human user, such as assistance targeted to each human user, communication of goals to enable effective teamwork, and task-directed motion resistance in physical training and rehabilitation contexts. Here we review the burgeoning field of interaction control in the control theory and machine learning communities, by analysing the exchange of haptic information between the robot and its human user, and how they share the task effort. We first review the estimation and learning methods to predict the human user intent with the large uncertainty, variability and noise and limited observation of human motion. Based on this motion intent core, typical interaction control strategies are described using a homotopy of shared control parameters. Recent methods of haptic communication and game theory are then presented to consider the co-adaptation of human and robot control and yield versatile interactive control as observed between humans. Finally, the limitations of the presented state of the art are discussed and directions for future research are outlined.
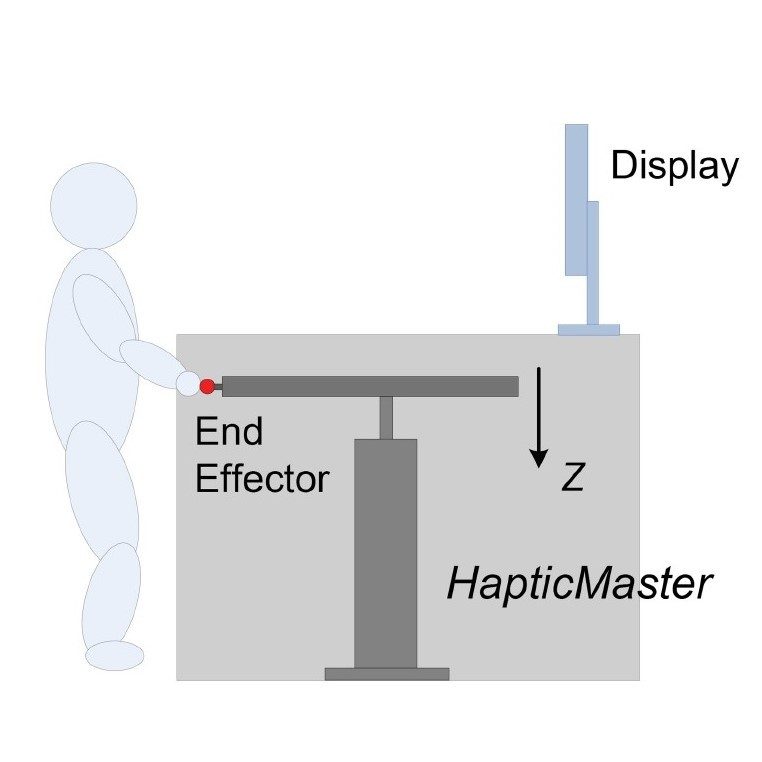
Takahashi, Chie; Azad, Morteza; Rajasekaran, Vijaykumar; Babič, Jan; Mistry, Michael
Human Stiffness Perception and Learning in Interacting With Compliant Environments Journal Article
In: Frontiers in Neuroscience, vol. 16, no. June, pp. 1–13, 2022, ISSN: 1662-453X.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Takahashi2022,
title = {Human Stiffness Perception and Learning in Interacting With Compliant Environments},
author = {Chie Takahashi and Morteza Azad and Vijaykumar Rajasekaran and Jan Babi\v{c} and Michael Mistry},
url = {https://www.frontiersin.org/articles/10.3389/fnins.2022.841901/full},
doi = {10.3389/fnins.2022.841901},
issn = {1662-453X},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
journal = {Frontiers in Neuroscience},
volume = {16},
number = {June},
pages = {1--13},
abstract = {Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.},
keywords = {Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.
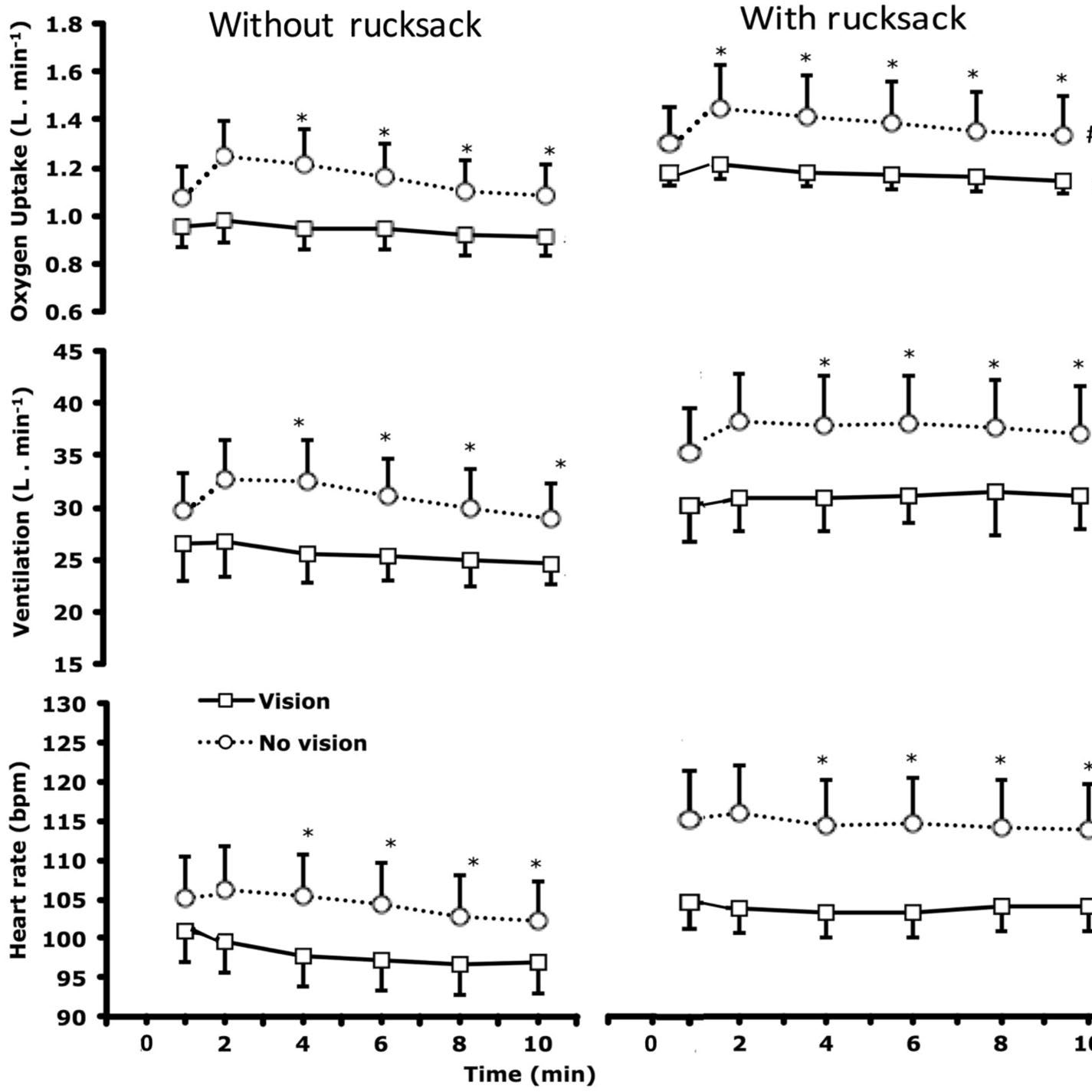
Eiken, Ola; Mekjavić, Igor B.; Babič, Jan; Danielsson, Ulf; Hallberg, Magnus; Kounalakis, Stylianos N.
Effects of vision on energy expenditure and kinematics during level walking Journal Article
In: European Journal of Applied Physiology, vol. 122, no. 5, pp. 1231–1237, 2022, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Kinematics, Postural Balance | Links:
@article{Eiken2022,
title = {Effects of vision on energy expenditure and kinematics during level walking},
author = {Ola Eiken and Igor B. Mekjavi\'{c} and Jan Babi\v{c} and Ulf Danielsson and Magnus Hallberg and Stylianos N. Kounalakis},
url = {https://link.springer.com/10.1007/s00421-022-04914-6},
doi = {10.1007/s00421-022-04914-6},
issn = {1439-6319},
year = {2022},
date = {2022-05-01},
urldate = {2022-05-01},
journal = {European Journal of Applied Physiology},
volume = {122},
number = {5},
pages = {1231--1237},
abstract = {Purpose We have previously observed substantially higher oxygen uptake in soldiers walking on terrain at night than when performing the same walk in bright daylight. The aims of the present study were to investigate the influence of vision on mechanical efficiency during slow, horizontal, constant-speed walking, and to determine whether any vision influence is modified by load carriage. Methods Each subject (n = 15) walked (3.3 km/h) for 10 min on a treadmill in four different conditions: (1) full vision, no carried load, (2) no vision, no carried load, (3) full vision with a 25.5-kg rucksack, (4) no vision with a 25.5-kg rucksack. Results Oxygen uptake was 0.94 ± 0.12 l/min in condition (1), 1.15 ± 0.20 l/min in (2), 1.15 ± 0.12 l/min in (3) and 1.35 ± 0.19 l/min in (4). Thus, lack of vision increased oxygen uptake by about 19%. Analyses of movement pattern, by use of optical markers attached to the limbs and torso, revealed considerably shorter step length (12 and 10%) in the no vision (2 and 4) than full vision conditions (1 and 3). No vision conditions (2 and 4) increased step width by 6 and 6%, and increased vertical foot clearance by 20 and 16% compared to full vision conditions (1 and 3). Conclusion The results suggest that vision has a marked influence on mechanical efficiency even during entrained, repetitive movements performed on an obstacle-free horizontal surface under highly predictable conditions.},
keywords = {Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Purpose We have previously observed substantially higher oxygen uptake in soldiers walking on terrain at night than when performing the same walk in bright daylight. The aims of the present study were to investigate the influence of vision on mechanical efficiency during slow, horizontal, constant-speed walking, and to determine whether any vision influence is modified by load carriage. Methods Each subject (n = 15) walked (3.3 km/h) for 10 min on a treadmill in four different conditions: (1) full vision, no carried load, (2) no vision, no carried load, (3) full vision with a 25.5-kg rucksack, (4) no vision with a 25.5-kg rucksack. Results Oxygen uptake was 0.94 ± 0.12 l/min in condition (1), 1.15 ± 0.20 l/min in (2), 1.15 ± 0.12 l/min in (3) and 1.35 ± 0.19 l/min in (4). Thus, lack of vision increased oxygen uptake by about 19%. Analyses of movement pattern, by use of optical markers attached to the limbs and torso, revealed considerably shorter step length (12 and 10%) in the no vision (2 and 4) than full vision conditions (1 and 3). No vision conditions (2 and 4) increased step width by 6 and 6%, and increased vertical foot clearance by 20 and 16% compared to full vision conditions (1 and 3). Conclusion The results suggest that vision has a marked influence on mechanical efficiency even during entrained, repetitive movements performed on an obstacle-free horizontal surface under highly predictable conditions.
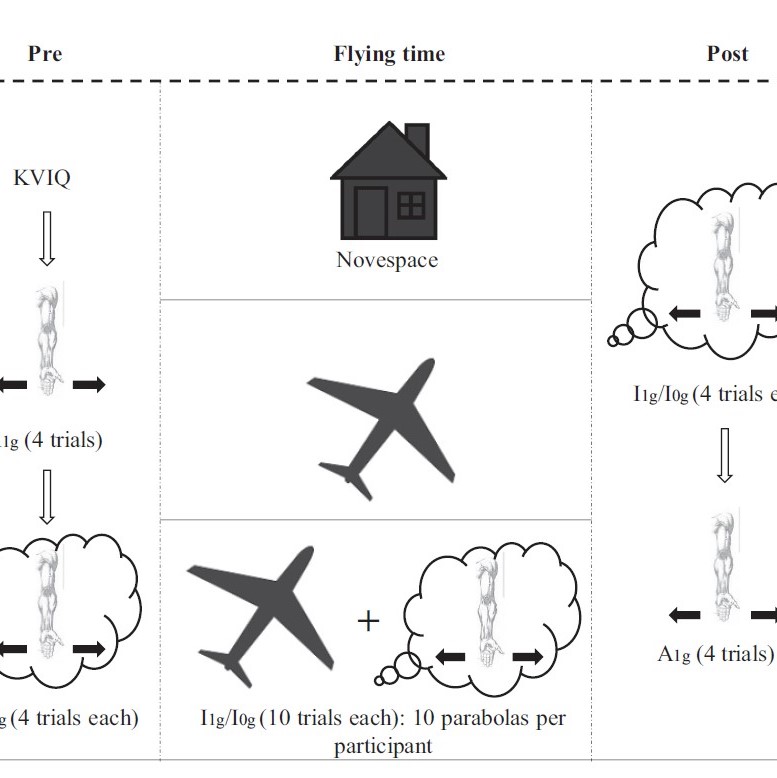
Monany, D. Rannaud; Barbiero, M.; Lebon, F.; Babič, Jan; Blohm, G.; Nozaki, D.; White, O.
Motor imagery helps updating internal models during microgravity exposure Journal Article
In: Journal of Neurophysiology, vol. 127, no. 2, pp. 434–443, 2022, ISSN: 0022-3077.
Abstract | BibTeX | Tags: Human Motor Control, Sensorimotor Learning | Links:
@article{RannaudMonany2022,
title = {Motor imagery helps updating internal models during microgravity exposure},
author = {D. Rannaud Monany and M. Barbiero and F. Lebon and Jan Babi\v{c} and G. Blohm and D. Nozaki and O. White},
url = {https://journals.physiology.org/doi/10.1152/jn.00214.2021},
doi = {10.1152/jn.00214.2021},
issn = {0022-3077},
year = {2022},
date = {2022-02-01},
urldate = {2022-02-01},
journal = {Journal of Neurophysiology},
volume = {127},
number = {2},
pages = {434--443},
abstract = {Gravity strongly affects the way movements are performed. How internal models process this information to adapt behavior to novel contexts is still unknown. The microgravity environment itself does not provide enough information to optimally adjust the period of natural arm swinging movements to microgravity. However, motor imagery of the task while immersed in microgravity was sufficient to update internal models. These results show that actually executing a task is not necessary to update graviception.},
keywords = {Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Gravity strongly affects the way movements are performed. How internal models process this information to adapt behavior to novel contexts is still unknown. The microgravity environment itself does not provide enough information to optimally adjust the period of natural arm swinging movements to microgravity. However, motor imagery of the task while immersed in microgravity was sufficient to update internal models. These results show that actually executing a task is not necessary to update graviception.
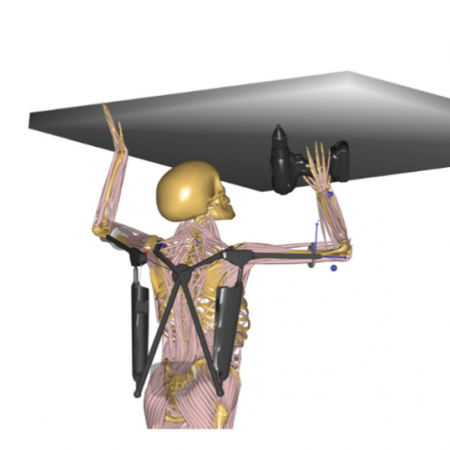
Fritzsche, Lars; Gärtner, Christian; Spitzhirn, Michael; Galibarov, Pavel E; Damsgaard, Michael; Maurice, Pauline; Babič, Jan
Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results Proceedings Article
In: Black, Nancy L; Neumann, W Patrick; Noy, Ian (Ed.): Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), pp. 353–357, Springer International Publishing, Cham, 2022, ISBN: 978-3-030-74614-8.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction
@inproceedings{10.1007/978-3-030-74614-8_43,
title = {Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results},
author = {Lars Fritzsche and Christian G\"{a}rtner and Michael Spitzhirn and Pavel E Galibarov and Michael Damsgaard and Pauline Maurice and Jan Babi\v{c}},
editor = {Nancy L Black and W Patrick Neumann and Ian Noy},
isbn = {978-3-030-74614-8},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021)},
pages = {353--357},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.

Fele, Benjamin; Lampe, Ajda; Peer, Peter; Štruc, Vitomir
C-VTON: Context-Driven Image-Based Virtual Try-On Network Proceedings Article
In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2022.
@inproceedings{fele2022cvton,
title = {C-VTON: Context-Driven Image-Based Virtual Try-On Network},
author = {Benjamin Fele and Ajda Lampe and Peter Peer and Vitomir \v{S}truc},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)},
abstract = {Image-based virtual try-on techniques have shown great promise for enhancing the user-experience and improving customer satisfaction on fashion-oriented e-commerce platforms. However, existing techniques are currently still limited in the quality of the try-on results they are able to produce from input images of diverse characteristics. In this work, we propose a Context-Driven Virtual Try-On Network (C-VTON) that addresses these limitations and convincingly transfers selected clothing items to the target subjects even under challenging pose configurations and in the presence of self-occlusions. At the core of the C-VTON pipeline are: (i) a geometric matching procedure that efficiently aligns the target clothing with the pose of the person in the input images, and (ii) a powerful image generator that utilizes various types of contextual information when synthesizing the final try-on result. C-VTON is evaluated in rigorous experiments on the VITON and MPV datasets and in comparison to state-of-the-art techniques from the literature. Experimental results show that the proposed approach is able to produce photo-realistic and visually convincing results and significantly improves on the existing state-of-the-art.},
keywords = {AI},
pubstate = {published},
tppubtype = {inproceedings}
}
Image-based virtual try-on techniques have shown great promise for enhancing the user-experience and improving customer satisfaction on fashion-oriented e-commerce platforms. However, existing techniques are currently still limited in the quality of the try-on results they are able to produce from input images of diverse characteristics. In this work, we propose a Context-Driven Virtual Try-On Network (C-VTON) that addresses these limitations and convincingly transfers selected clothing items to the target subjects even under challenging pose configurations and in the presence of self-occlusions. At the core of the C-VTON pipeline are: (i) a geometric matching procedure that efficiently aligns the target clothing with the pose of the person in the input images, and (ii) a powerful image generator that utilizes various types of contextual information when synthesizing the final try-on result. C-VTON is evaluated in rigorous experiments on the VITON and MPV datasets and in comparison to state-of-the-art techniques from the literature. Experimental results show that the proposed approach is able to produce photo-realistic and visually convincing results and significantly improves on the existing state-of-the-art.
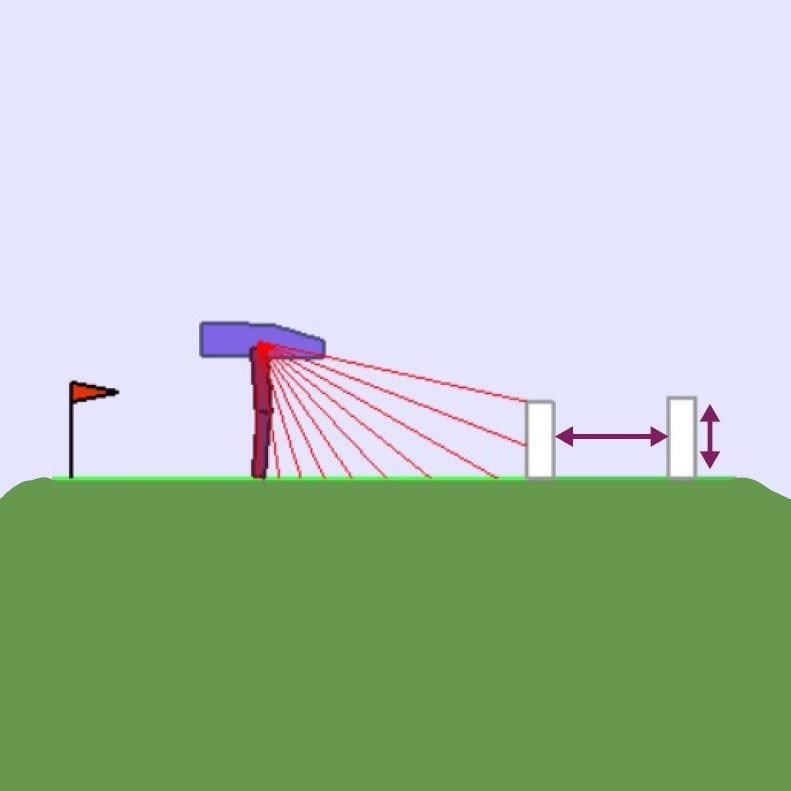
Fele, Benjamin; Babič, Jan; Pollak, Senja; Žnidaršič, Martin
Evaluation of curriculum learning algorithms using computational creativity inspired metrics Proceedings Article
In: Hedblom, Maria M. (Ed.): Proceedings of the Thirteenth International Conference on Computational Creativity, ICCC'22, pp. 364–373, Bolzano, Italy, 2022.
Abstract | BibTeX | Tags: AI, Machine Learning | Links:
@inproceedings{Fele2022,
title = {Evaluation of curriculum learning algorithms using computational creativity inspired metrics},
author = {Benjamin Fele and Jan Babi\v{c} and Senja Pollak and Martin \v{Z}nidar\v{s}i\v{c}},
editor = {Maria M. Hedblom},
url = {https://computationalcreativity.net/iccc22/wp-content/uploads/2022/06/ICCC-2022_5L_Fele-et-al..pdf},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the Thirteenth International Conference on Computational Creativity, ICCC'22},
pages = {364--373},
address = {Bolzano, Italy},
abstract = {Curriculum learning, especially in robotics, is an active research field aiming to devise algorithms that speed up knowledge acquisition by proposing sequences of tasks an agent should train on. We focus on curriculum generation in reinforcement learning, where various methods are currently compared based on the agent's performance in terms of rewards on a predefined distribution of target tasks. We want to extend this singular characterization of existing algorithms by introducing metrics inspired by notions from the field of computational creativity. Namely, we introduce surprise, novelty, interestingness, and typicality that quantify various aspects of tasks stochastically proposed by the curriculum learning algorithms for the learner to train on. We model proposed tasks with Gaussian mixture models which enable their probabilistic interpretation, and use Hellinger distances between distributions and training rewards in formulation of the proposed metrics. Results are presented for eight curriculum learning algorithms showcasing differences in prioritization of various aspects of task creation and statistically different mean metric values when comparing agent's best and worst training runs. The latter finding is not only useful for analysis of existing algorithms, but potentially also provides guidance for design of future curriculum learning methods.},
keywords = {AI, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Curriculum learning, especially in robotics, is an active research field aiming to devise algorithms that speed up knowledge acquisition by proposing sequences of tasks an agent should train on. We focus on curriculum generation in reinforcement learning, where various methods are currently compared based on the agent's performance in terms of rewards on a predefined distribution of target tasks. We want to extend this singular characterization of existing algorithms by introducing metrics inspired by notions from the field of computational creativity. Namely, we introduce surprise, novelty, interestingness, and typicality that quantify various aspects of tasks stochastically proposed by the curriculum learning algorithms for the learner to train on. We model proposed tasks with Gaussian mixture models which enable their probabilistic interpretation, and use Hellinger distances between distributions and training rewards in formulation of the proposed metrics. Results are presented for eight curriculum learning algorithms showcasing differences in prioritization of various aspects of task creation and statistically different mean metric values when comparing agent's best and worst training runs. The latter finding is not only useful for analysis of existing algorithms, but potentially also provides guidance for design of future curriculum learning methods.
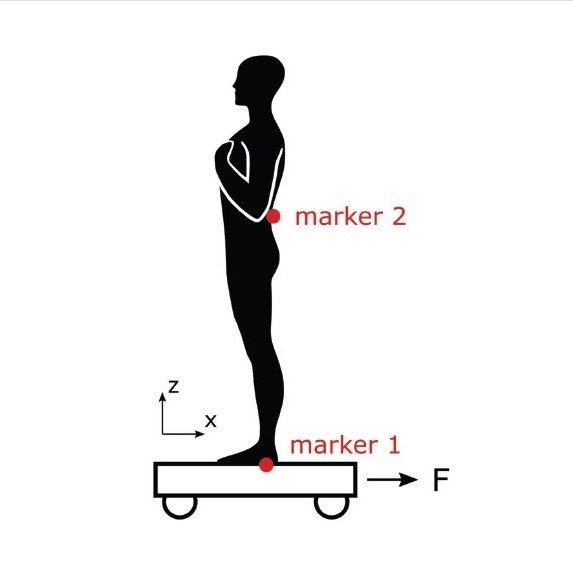
Gorjan, Daša; Šarabon, Nejc; Babič, Jan
Inter-Individual Variability in Postural Control During External Center of Mass Stabilization Journal Article
In: Frontiers in Physiology, vol. 12, no. January, 2022, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance | Links:
@article{Gorjan2022,
title = {Inter-Individual Variability in Postural Control During External Center of Mass Stabilization},
author = {Da\v{s}a Gorjan and Nejc \v{S}arabon and Jan Babi\v{c}},
url = {https://www.frontiersin.org/articles/10.3389/fphys.2021.722732/full},
doi = {10.3389/fphys.2021.722732},
issn = {1664-042X},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
journal = {Frontiers in Physiology},
volume = {12},
number = {January},
abstract = {Understanding the relation between the motion of the center of mass (COM) and the center of pressure (COP) is important to understand the underlying mechanisms of maintaining body equilibrium. One way to investigate this is to stabilize COM by fixing the joints of the human and looking at the corresponding COP reactions. However, this approach constrains the natural motion of the human. To avoid this shortcoming, we stabilized COM without constraining the joint movements by using an external stabilization method based on inverted cart-pendulum system. Interestingly, this method only stabilized COM of a subgroup of participants and had a destabilizing effect for others which implies significant variability in inter-individual postural control. The aim of this work was to investigate the underlying causes of inter-individual variability by studying the postural parameters of quiet standing before the external stabilization. Eighteen volunteers took part in the experiment where they were standing on an actuated cart for 335 s. In the middle of this period we stabilized their COM in anteroposterior direction for 105 s. To stabilize the COM, we controlled the position of the cart using a double proportional\textendashintegral\textendashderivative controller. We recorded COM position throughout the experiment, calculated its velocity, amplitude, and frequency during the quiet standing before the stabilization, and used these parameters as features in hierarchical clustering method. Clustering solution revealed that postural parameters of quiet standing before the stabilization cannot explain the inter-individual variability of postural responses during the external COM stabilization. COM was successfully stabilized for a group of participants but had a destabilizing effect on the others, showing a variability in individual postural control which cannot be explained by postural parameters of quiet-stance.},
keywords = {Human Motor Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Understanding the relation between the motion of the center of mass (COM) and the center of pressure (COP) is important to understand the underlying mechanisms of maintaining body equilibrium. One way to investigate this is to stabilize COM by fixing the joints of the human and looking at the corresponding COP reactions. However, this approach constrains the natural motion of the human. To avoid this shortcoming, we stabilized COM without constraining the joint movements by using an external stabilization method based on inverted cart-pendulum system. Interestingly, this method only stabilized COM of a subgroup of participants and had a destabilizing effect for others which implies significant variability in inter-individual postural control. The aim of this work was to investigate the underlying causes of inter-individual variability by studying the postural parameters of quiet standing before the external stabilization. Eighteen volunteers took part in the experiment where they were standing on an actuated cart for 335 s. In the middle of this period we stabilized their COM in anteroposterior direction for 105 s. To stabilize the COM, we controlled the position of the cart using a double proportional–integral–derivative controller. We recorded COM position throughout the experiment, calculated its velocity, amplitude, and frequency during the quiet standing before the stabilization, and used these parameters as features in hierarchical clustering method. Clustering solution revealed that postural parameters of quiet standing before the stabilization cannot explain the inter-individual variability of postural responses during the external COM stabilization. COM was successfully stabilized for a group of participants but had a destabilizing effect on the others, showing a variability in individual postural control which cannot be explained by postural parameters of quiet-stance.
2021
Babič, Jan; Laffranchi, Matteo; Tessari, Federico; Verstraten, Tom; Novak, Domen; Šarabon, Nejc; Ugurlu, Barkan; Peternel, Luka; Torricelli, Diego; Veneman, Jan F.
Challenges and solutions for application and wider adoption of wearable robots Journal Article
In: Wearable Technologies, vol. 2, pp. e14, 2021, ISSN: 2631-7176.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Babic2021,
title = {Challenges and solutions for application and wider adoption of wearable robots},
author = {Jan Babi\v{c} and Matteo Laffranchi and Federico Tessari and Tom Verstraten and Domen Novak and Nejc \v{S}arabon and Barkan Ugurlu and Luka Peternel and Diego Torricelli and Jan F. Veneman},
url = {https://www.cambridge.org/core/product/identifier/S263171762100013X/type/journal_article},
doi = {10.1017/wtc.2021.13},
issn = {2631-7176},
year = {2021},
date = {2021-11-01},
urldate = {2021-11-01},
journal = {Wearable Technologies},
volume = {2},
pages = {e14},
abstract = {The science and technology of wearable robots are steadily advancing, and the use of such robots in our everyday life appears to be within reach. Nevertheless, widespread adoption of wearable robots should not be taken for granted, especially since many recent attempts to bring them to real-life applications resulted in mixed outcomes. The aim of this article is to address the current challenges that are limiting the application and wider adoption of wearable robots that are typically worn over the human body. We categorized the challenges into mechanical layout, actuation, sensing, body interface, control, human\textendashrobot interfacing and coadaptation, and benchmarking. For each category, we discuss specific challenges and the rationale for why solving them is important, followed by an overview of relevant recent works. We conclude with an opinion that summarizes possible solutions that could contribute to the wider adoption of wearable robots.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
The science and technology of wearable robots are steadily advancing, and the use of such robots in our everyday life appears to be within reach. Nevertheless, widespread adoption of wearable robots should not be taken for granted, especially since many recent attempts to bring them to real-life applications resulted in mixed outcomes. The aim of this article is to address the current challenges that are limiting the application and wider adoption of wearable robots that are typically worn over the human body. We categorized the challenges into mechanical layout, actuation, sensing, body interface, control, human–robot interfacing and coadaptation, and benchmarking. For each category, we discuss specific challenges and the rationale for why solving them is important, followed by an overview of relevant recent works. We conclude with an opinion that summarizes possible solutions that could contribute to the wider adoption of wearable robots.

Kunavar, Tjaša; Jamšek, Marko; Barbiero, Marie; Blohm, Gunnar; Nozaki, Daichi; Papaxanthis, Charalambos; White, Olivier; Babič, Jan
Effects of Local Gravity Compensation on Motor Control During Altered Environmental Gravity Journal Article
In: Frontiers in Neural Circuits, vol. 15, 2021, ISSN: 1662-5110.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning | Links:
@article{Kunavar2021,
title = {Effects of Local Gravity Compensation on Motor Control During Altered Environmental Gravity},
author = {Tja\v{s}a Kunavar and Marko Jam\v{s}ek and Marie Barbiero and Gunnar Blohm and Daichi Nozaki and Charalambos Papaxanthis and Olivier White and Jan Babi\v{c}},
url = {https://www.frontiersin.org/articles/10.3389/fncir.2021.750267/full},
doi = {10.3389/fncir.2021.750267},
issn = {1662-5110},
year = {2021},
date = {2021-10-01},
urldate = {2021-10-01},
journal = {Frontiers in Neural Circuits},
volume = {15},
abstract = {Our sensorimotor control is well adapted to normogravity environment encountered on Earth and any change in gravity significantly disturbs our movement. In order to produce appropriate motor commands for aimed arm movements such as pointing or reaching, environmental changes have to be taken into account. This adaptation is crucial when performing successful movements during microgravity and hypergravity conditions. To mitigate the effects of changing gravitational levels, such as the changed movement duration and decreased accuracy, we explored the possible beneficial effects of gravity compensation on movement. Local gravity compensation was achieved using a motorized robotic device capable of applying precise forces to the subject's wrist that generated a normogravity equivalent torque at the shoulder joint during periods of microgravity and hypergravity. The efficiency of the local gravity compensation was assessed with an experiment in which participants performed a series of pointing movements toward the target on a screen during a parabolic flight. We compared movement duration, accuracy, movement trajectory, and muscle activations of movements during periods of microgravity and hypergravity with conditions when local gravity compensation was provided. The use of local gravity compensation at the arm mitigated the changes in movement duration, accuracy, and muscle activity. Our results suggest that the use of such an assistive device helps with movements during unfamiliar environmental gravity.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Our sensorimotor control is well adapted to normogravity environment encountered on Earth and any change in gravity significantly disturbs our movement. In order to produce appropriate motor commands for aimed arm movements such as pointing or reaching, environmental changes have to be taken into account. This adaptation is crucial when performing successful movements during microgravity and hypergravity conditions. To mitigate the effects of changing gravitational levels, such as the changed movement duration and decreased accuracy, we explored the possible beneficial effects of gravity compensation on movement. Local gravity compensation was achieved using a motorized robotic device capable of applying precise forces to the subject's wrist that generated a normogravity equivalent torque at the shoulder joint during periods of microgravity and hypergravity. The efficiency of the local gravity compensation was assessed with an experiment in which participants performed a series of pointing movements toward the target on a screen during a parabolic flight. We compared movement duration, accuracy, movement trajectory, and muscle activations of movements during periods of microgravity and hypergravity with conditions when local gravity compensation was provided. The use of local gravity compensation at the arm mitigated the changes in movement duration, accuracy, and muscle activity. Our results suggest that the use of such an assistive device helps with movements during unfamiliar environmental gravity.
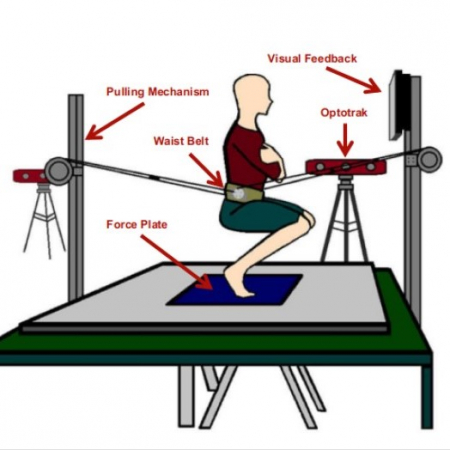
Arditi, Emir; Kunavar, Tjaša; Ugur, Emre; Babič, Jan; Oztop, Erhan
Inferring Cost Functions Using Reward Parameter Search and Policy Gradient Reinforcement Learning Proceedings Article
In: IECON 2021 – 47th Annual Conference of the IEEE Industrial Electronics Society, pp. 1–6, IEEE, 2021, ISBN: 978-1-6654-3554-3.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning | Links:
@inproceedings{Arditi2021,
title = {Inferring Cost Functions Using Reward Parameter Search and Policy Gradient Reinforcement Learning},
author = {Emir Arditi and Tja\v{s}a Kunavar and Emre Ugur and Jan Babi\v{c} and Erhan Oztop},
url = {https://ieeexplore.ieee.org/document/9589967/},
doi = {10.1109/IECON48115.2021.9589967},
isbn = {978-1-6654-3554-3},
year = {2021},
date = {2021-10-01},
urldate = {2021-10-01},
booktitle = {IECON 2021 \textendash 47th Annual Conference of the IEEE Industrial Electronics Society},
pages = {1--6},
publisher = {IEEE},
abstract = {This study focuses on inferring cost functions of obtained movement data using reward parameter search and pol-icy gradient based Reinforcement Learning (RL). The behavior data for this task is obtained through a series of squat-to-stand movements of human participants under dynamic perturbations. The key parameter searched in the cost function is the weight of total torque used in performing the squat-to-stand action. An approximate model is used to learn squat-to-stand movements via a policy gradient method, namely Proximal Policy Optimization(PPO). A behavioral similarity metric based on Center of Mass(COM) is used to find the most likely weight parameter. The stochasticity in the training result of PPO is dealt with multiple runs, and as a result, a reasonable and a stable Inverse Reinforcement Learning(IRL) algorithm is obtained in terms of performance. The results indicate that for some participants, the reward function parameters of the experts were inferred successfully.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
This study focuses on inferring cost functions of obtained movement data using reward parameter search and pol-icy gradient based Reinforcement Learning (RL). The behavior data for this task is obtained through a series of squat-to-stand movements of human participants under dynamic perturbations. The key parameter searched in the cost function is the weight of total torque used in performing the squat-to-stand action. An approximate model is used to learn squat-to-stand movements via a policy gradient method, namely Proximal Policy Optimization(PPO). A behavioral similarity metric based on Center of Mass(COM) is used to find the most likely weight parameter. The stochasticity in the training result of PPO is dealt with multiple runs, and as a result, a reasonable and a stable Inverse Reinforcement Learning(IRL) algorithm is obtained in terms of performance. The results indicate that for some participants, the reward function parameters of the experts were inferred successfully.
Jamšek, Marko; Kunavar, Tjaša; Bobek, Urban; Rueckert, Elmar; Babič, Jan
Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4417–4424, 2021, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction | Links:
@article{Jamsek2021,
title = {Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Urban Bobek and Elmar Rueckert and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/9387088/},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-07-01},
urldate = {2021-07-01},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {3},
pages = {4417--4424},
abstract = {There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.},
keywords = {Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.
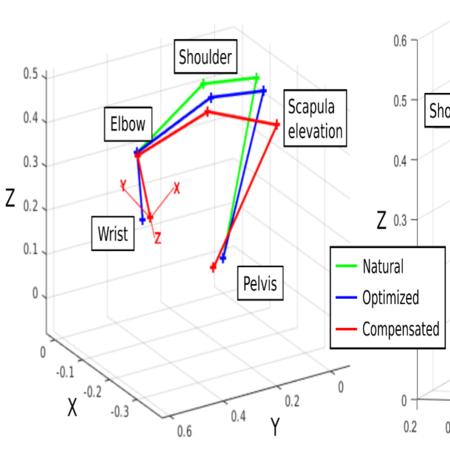
Poignant, Alexis; Legrand, Mathilde; Jarrassé, Nathanaël; Morel, Guillaume
Computing the positioning error of an upper-arm robotic prosthesis from the observation of its wearer’s posture Proceedings Article
In: 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 10446-10452, 2021, ISSN: 2577-087X.
Abstract | BibTeX | Tags: Ergonomy, Kinematics | Links:
@inproceedings{9561613,
title = {Computing the positioning error of an upper-arm robotic prosthesis from the observation of its wearer’s posture},
author = {Alexis Poignant and Mathilde Legrand and Nathana\"{e}l Jarrass\'{e} and Guillaume Morel},
doi = {10.1109/ICRA48506.2021.9561613},
issn = {2577-087X},
year = {2021},
date = {2021-05-01},
urldate = {2021-05-01},
booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {10446-10452},
abstract = {When the arm prosthesis worn by an amputated Human being is not adequately configured with respect to the end-effector task, body compensations are often observed. Namely, to compensate for a wrong joint positioning on the robotic distal side, a subject trying to reach a desired position/orientation of his/her hand mobilizes his/her proximal joints, thus exploiting the redundancy of the human+robot kinematic chain.In this paper, we explore the possibility of exploiting this well-known behavior to reverse the causality: if we observe the posture of an amputated subject wearing a prosthesis during a hand positioning task, to what extent can we infer the positioning error of the prosthesis?To answer this question, we make the assumption that the adequate, or natural posture for a given task is one that optimizes a postural score. The proposed approach then consists in i) measuring the joint posture of the subject fitted with the prosthesis; ii) search for an alternative posture that optimizes a postural score within the null space of the human+robot kinematic chain and iii) compute the position error for the robot joints between the initial and the optimized posture.An experimental evaluation is provided with non amputated subjects who emulate erratic positioning of their distal joints during hand positioning tasks. Results show that joint errors are estimated with a precision that seems compatible with the implementation of a real time control algorithm.},
keywords = {Ergonomy, Kinematics},
pubstate = {published},
tppubtype = {inproceedings}
}
When the arm prosthesis worn by an amputated Human being is not adequately configured with respect to the end-effector task, body compensations are often observed. Namely, to compensate for a wrong joint positioning on the robotic distal side, a subject trying to reach a desired position/orientation of his/her hand mobilizes his/her proximal joints, thus exploiting the redundancy of the human+robot kinematic chain.In this paper, we explore the possibility of exploiting this well-known behavior to reverse the causality: if we observe the posture of an amputated subject wearing a prosthesis during a hand positioning task, to what extent can we infer the positioning error of the prosthesis?To answer this question, we make the assumption that the adequate, or natural posture for a given task is one that optimizes a postural score. The proposed approach then consists in i) measuring the joint posture of the subject fitted with the prosthesis; ii) search for an alternative posture that optimizes a postural score within the null space of the human+robot kinematic chain and iii) compute the position error for the robot joints between the initial and the optimized posture.An experimental evaluation is provided with non amputated subjects who emulate erratic positioning of their distal joints during hand positioning tasks. Results show that joint errors are estimated with a precision that seems compatible with the implementation of a real time control algorithm.
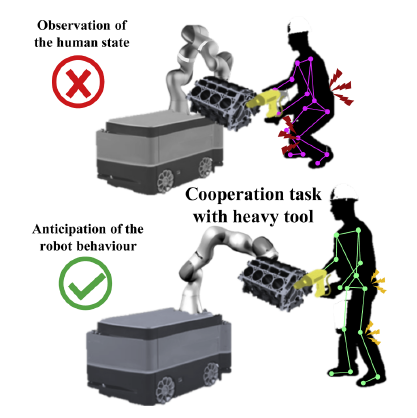
Kim, Wansoo; Peternel, Luka; Lorenzini, Marta; Babič, Jan; Ajoudani, Arash
A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools Journal Article
In: Robotics and Computer-Integrated Manufacturing, vol. 68, pp. 102084, 2021, ISSN: 07365845.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Kim2021,
title = {A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools},
author = {Wansoo Kim and Luka Peternel and Marta Lorenzini and Jan Babi\v{c} and Arash Ajoudani},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0736584520302945},
doi = {10.1016/j.rcim.2020.102084},
issn = {07365845},
year = {2021},
date = {2021-04-01},
journal = {Robotics and Computer-Integrated Manufacturing},
volume = {68},
pages = {102084},
abstract = {In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.},
keywords = {Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.
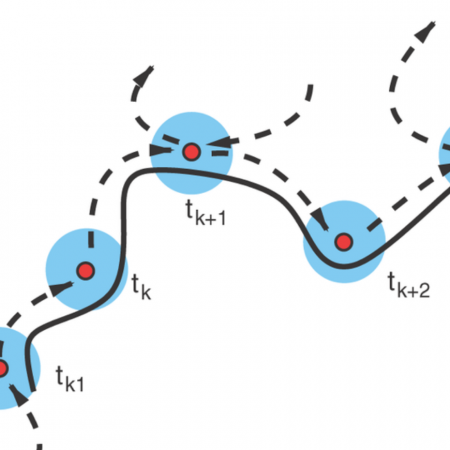
Petrič, Tadej; Jamšek, Marko; Babič, Jan
Exoskeleton Control Based on Network of Stable Heteroclinic Channels (SHC) Combined with Gaussian Mixture Models (GMM) Proceedings Article
In: Lenarčič, Jadran; Siciliano, Bruno (Ed.): Advances in Robot Kinematics 2020, pp. 341–348, Springer International Publishing, Cham, 2021, ISBN: 978-3-030-50975-0.
Abstract | BibTeX | Tags: Exoskeleton Design and Control | Links:
@inproceedings{Petric2020c,
title = {Exoskeleton Control Based on Network of Stable Heteroclinic Channels (SHC) Combined with Gaussian Mixture Models (GMM)},
author = {Tadej Petri\v{c} and Marko Jam\v{s}ek and Jan Babi\v{c}},
editor = {Jadran Lenar\v{c}i\v{c} and Bruno Siciliano},
url = {http://link.springer.com/10.1007/978-3-030-50975-0_42},
isbn = {978-3-030-50975-0},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
booktitle = {Advances in Robot Kinematics 2020},
pages = {341--348},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {One of the major causes of disability and sick day leaves is lower back pain. Hence it can result in a decreased life quality and lower industrial productivity. One of the possible solutions to lower back pain could be the use of exoskeletons, which would reduce the spinal loading. One of such solutions is a quasi-passive spinal exoskeleton that engages and disengages the passive support depending on the movements performed by the user. This enables the spinal support for the user when lifting a heavy load and for all other tasks, the user motion is unobstructed. To achieve autonomous clutch activation, the main challenge is to properly classify the beginning of each motion. In this paper, we proposed a novel control method that uses Gaussian Mixture Models (GMM) for movement classifiers and a network of Stable Heteroclinic Channels (SHC) for designing a phase-state-machine. Integrating GMM into the SHC network enables a fast and reliable control of the clutch mechanism of the quasi-passive spinal exoskeleton. The control system capabilities were demonstrated in an experiment with a male subject wearing the quasi-passive exoskeleton while executing three different movements representative for an industrial working environment: walking, standing, and lifting.},
keywords = {Exoskeleton Design and Control},
pubstate = {published},
tppubtype = {inproceedings}
}
One of the major causes of disability and sick day leaves is lower back pain. Hence it can result in a decreased life quality and lower industrial productivity. One of the possible solutions to lower back pain could be the use of exoskeletons, which would reduce the spinal loading. One of such solutions is a quasi-passive spinal exoskeleton that engages and disengages the passive support depending on the movements performed by the user. This enables the spinal support for the user when lifting a heavy load and for all other tasks, the user motion is unobstructed. To achieve autonomous clutch activation, the main challenge is to properly classify the beginning of each motion. In this paper, we proposed a novel control method that uses Gaussian Mixture Models (GMM) for movement classifiers and a network of Stable Heteroclinic Channels (SHC) for designing a phase-state-machine. Integrating GMM into the SHC network enables a fast and reliable control of the clutch mechanism of the quasi-passive spinal exoskeleton. The control system capabilities were demonstrated in an experiment with a male subject wearing the quasi-passive exoskeleton while executing three different movements representative for an industrial working environment: walking, standing, and lifting.
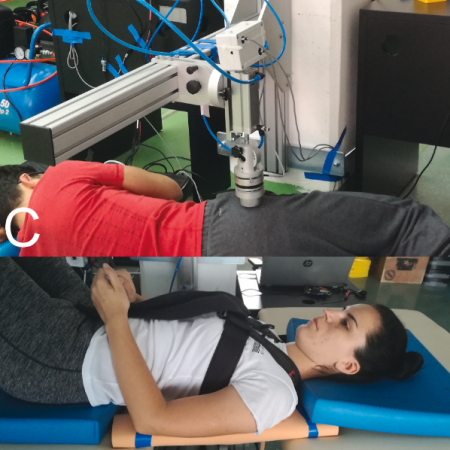
Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
Human pressure tolerance and effects of different padding materials with implications for development of exoskeletons and similar devices Journal Article
In: Applied Ergonomics, vol. 93, 2021, ISSN: 18729126.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Kozinc2021,
title = {Human pressure tolerance and effects of different padding materials with implications for development of exoskeletons and similar devices},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.1016/j.apergo.2021.103379},
issn = {18729126},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Applied Ergonomics},
volume = {93},
abstract = {In this study, we assessed pressure tolerance in 16 healthy participants at the thigh, chest, and pelvic area, using different surfaces (1 cm2, 20 cm2 and different components, used in exoskeleton design), and the effects of different padding materials. Our results showed substantial variability in pressure tolerance among the participants, as well as lower pressure tolerance in females. Regarding the force applied with the exoskeleton components, male participants had higher discomfort threshold (230.3 ± 44.9 N compared to females (116.1 ± 24.6 N) in the chest area. For the applications with 20 cm2 surface, the males also showed higher pain threshold at the thigh (89.3 ± 41.8 N vs. 34.6 ± 27.2 N) and the pelvis (97.6 ± 37.0 N vs. 56.1 ± 29.5 N). All padding materials increased pressure tolerance for 10\textendash38% (p \< 0.001), but little differences between materials were observed.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this study, we assessed pressure tolerance in 16 healthy participants at the thigh, chest, and pelvic area, using different surfaces (1 cm2, 20 cm2 and different components, used in exoskeleton design), and the effects of different padding materials. Our results showed substantial variability in pressure tolerance among the participants, as well as lower pressure tolerance in females. Regarding the force applied with the exoskeleton components, male participants had higher discomfort threshold (230.3 ± 44.9 N compared to females (116.1 ± 24.6 N) in the chest area. For the applications with 20 cm2 surface, the males also showed higher pain threshold at the thigh (89.3 ± 41.8 N vs. 34.6 ± 27.2 N) and the pelvis (97.6 ± 37.0 N vs. 56.1 ± 29.5 N). All padding materials increased pressure tolerance for 10–38% (p < 0.001), but little differences between materials were observed.

Fonda, Borut; Babič, Jan; Šarabon, Nejc
The medial‐lateral pedal force component correlates with q‐angle during steady‐state cycling at different workloads and cadences Journal Article
In: Applied Sciences (Switzerland), vol. 11, no. 3, pp. 1–8, 2021, ISSN: 20763417.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Sport | Links:
@article{Fonda2021,
title = {The medial‐lateral pedal force component correlates with q‐angle during steady‐state cycling at different workloads and cadences},
author = {Borut Fonda and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/app11031004},
issn = {20763417},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Applied Sciences (Switzerland)},
volume = {11},
number = {3},
pages = {1--8},
abstract = {Leg movement during cycling is constrained to the pedal/crank path and predominantly occurs in a sagittal plane. Medial‐lateral force (FML) applied to the pedals is considered as a waste and does not contribute to the pedaling. The aim of this study was to examine the changes in FML across different cadences and workloads, and to examine the correlation with lateral knee movement (Q‐angle). Twenty‐two cyclists completed six trials at three workloads (2, 2.5 and 3 W/kg) and three cadences (75, 85, 95 rpm). Forces were recorded from the force pedal mounted to the left side. Absolute and normalized (to the peak total force) FML were compared across conditions and crosscorrelation with Q‐angle was calculated. Absolute FML was significantly different across cadences and workloads (p \< 0.05) with higher absolute FML at higher cadence. There was no significant difference in normalized FML across the three cadences. There was a significant decrease in normalized FML ($sim$10 N) at higher workloads. Statistically significant correlations were found between the FML and Q‐angle (R = 0.70\textendash0.77). The results demonstrate the link between the FML and Q‐ angle in healthy pain‐free cyclists during stationary cycling. It has also been observed that smaller normalized magnitude of the FML is present when the force effectiveness is increased.},
keywords = {Ergonomy, Human Performance Augmentation, Sport},
pubstate = {published},
tppubtype = {article}
}
Leg movement during cycling is constrained to the pedal/crank path and predominantly occurs in a sagittal plane. Medial‐lateral force (FML) applied to the pedals is considered as a waste and does not contribute to the pedaling. The aim of this study was to examine the changes in FML across different cadences and workloads, and to examine the correlation with lateral knee movement (Q‐angle). Twenty‐two cyclists completed six trials at three workloads (2, 2.5 and 3 W/kg) and three cadences (75, 85, 95 rpm). Forces were recorded from the force pedal mounted to the left side. Absolute and normalized (to the peak total force) FML were compared across conditions and crosscorrelation with Q‐angle was calculated. Absolute FML was significantly different across cadences and workloads (p < 0.05) with higher absolute FML at higher cadence. There was no significant difference in normalized FML across the three cadences. There was a significant decrease in normalized FML ($sim$10 N) at higher workloads. Statistically significant correlations were found between the FML and Q‐angle (R = 0.70–0.77). The results demonstrate the link between the FML and Q‐ angle in healthy pain‐free cyclists during stationary cycling. It has also been observed that smaller normalized magnitude of the FML is present when the force effectiveness is increased.

Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
In: International Journal of Environmental Research and Public Health, vol. 18, no. 1, pp. 1–9, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Kozinc2021a,
title = {Comparison of subjective responses of low back pain patients and asymptomatic controls to use of spinal exoskeleton during simple load lifting tasks: A pilot study},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/ijerph18010161},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {1},
pages = {1--9},
abstract = {Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0\textendash10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0–10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.

Fritzsche, Lars; Galibarov, Pavel E.; Gartner, Christian; Bornmann, Jonas; Damsgaard, Michael; Wall, Rudolf; Schirrmeister, Benjamin; Gonzalez-Vargas, Jose; Pucci, Daniele; Maurice, Pauline; Ivaldi, Serena; Babič, Jan
Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System Journal Article
In: Wearable Technologies, vol. 2, 2021.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@article{Fritzsche2021,
title = {Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System},
author = {Lars Fritzsche and Pavel E. Galibarov and Christian Gartner and Jonas Bornmann and Michael Damsgaard and Rudolf Wall and Benjamin Schirrmeister and Jose Gonzalez-Vargas and Daniele Pucci and Pauline Maurice and Serena Ivaldi and Jan Babi\v{c}},
doi = {10.1017/wtc.2021.5},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Wearable Technologies},
volume = {2},
abstract = {IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.

Gorjan, Daša; Bellicha, Angelina; Čamernik, Jernej; Bachta, Wael; Babič, Jan
Induced stabilization of center of mass decreases variability of center of pressure regardless of visual or tactile information Journal Article
In: Journal of Biomechanics, vol. 117, 2021, ISSN: 18732380.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Gorjan2021,
title = {Induced stabilization of center of mass decreases variability of center of pressure regardless of visual or tactile information},
author = {Da\v{s}a Gorjan and Angelina Bellicha and Jernej \v{C}amernik and Wael Bachta and Jan Babi\v{c}},
doi = {10.1016/j.jbiomech.2020.110199},
issn = {18732380},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Journal of Biomechanics},
volume = {117},
abstract = {Traditional theories claim that center of pressure (COP) is oscillating to minimize the center of mass (COM) movements, contrary to exploratory theories which propose that COP oscillates to increase sensory information flow from the environment. The aim of this work was to better understand the underlying postural control mechanisms, specifically the interplay of COP oscillations and sensory information flow on keeping the COM stable. Eighteen volunteers took part of the experiment divided into three parts based on sensory conditions: eyes opened, eyes closed and eyes closed with lightly touching a fixed object with one finger. Throughout each part the participants had to quietly stand for 335 s. In the middle of each part, we stabilized their COM for 105 s using a robotized waist-pull system. We recorded whole-body kinematics, COP oscillations, electromyographic activity of soleus and tibialis anterior muscles and the force applied by the finger during light touch conditions. The variability of COP significantly decreased when the COM was stabilized in all sensory conditions. The interaction between sensory condition and stabilization was also significant with different decline of COP variability between quiet standing and stabilization part in all three different sensory conditions. Ankle and knee angle variability decreased significantly while the hip angle variability did not. Our findings suggest that COP is not moving to explore the environment, but to attenuate oscillations of the COM. However, possible functional aspect of movement variability to keep the COM stable still remains.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Traditional theories claim that center of pressure (COP) is oscillating to minimize the center of mass (COM) movements, contrary to exploratory theories which propose that COP oscillates to increase sensory information flow from the environment. The aim of this work was to better understand the underlying postural control mechanisms, specifically the interplay of COP oscillations and sensory information flow on keeping the COM stable. Eighteen volunteers took part of the experiment divided into three parts based on sensory conditions: eyes opened, eyes closed and eyes closed with lightly touching a fixed object with one finger. Throughout each part the participants had to quietly stand for 335 s. In the middle of each part, we stabilized their COM for 105 s using a robotized waist-pull system. We recorded whole-body kinematics, COP oscillations, electromyographic activity of soleus and tibialis anterior muscles and the force applied by the finger during light touch conditions. The variability of COP significantly decreased when the COM was stabilized in all sensory conditions. The interaction between sensory condition and stabilization was also significant with different decline of COP variability between quiet standing and stabilization part in all three different sensory conditions. Ankle and knee angle variability decreased significantly while the hip angle variability did not. Our findings suggest that COP is not moving to explore the environment, but to attenuate oscillations of the COM. However, possible functional aspect of movement variability to keep the COM stable still remains.
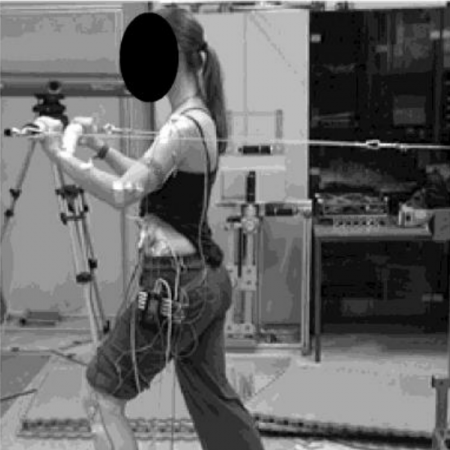
Sever, Jernej; Babič, Jan; Kozinc, Žiga; Šarabon, Nejc
Postural responses to sudden horizontal perturbations in tai chi practitioners Journal Article
In: International Journal of Environmental Research and Public Health, vol. 18, no. 5, pp. 1–12, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport | Links:
@article{Sever2021,
title = {Postural responses to sudden horizontal perturbations in tai chi practitioners},
author = {Jernej Sever and Jan Babi\v{c} and \v{Z}iga Kozinc and Nejc \v{S}arabon},
doi = {10.3390/ijerph18052692},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {5},
pages = {1--12},
abstract = {Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p \< 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005\textendash0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance, Sport},
pubstate = {published},
tppubtype = {article}
}
Tai Chi has been shown to elicit numerous positive effects on health and well-being. In this study, we examined reactive postural control after sudden unloading horizontal perturbations, which resembled situations encountered during Tai Chi. The study involved 20 participants, 10 in the Tai Chi group (age: 37.4 ± 7.8 years), who had been regularly training the push-hand technique for at least 7 years, and 10 in the control group, consisting of healthy adults (age: 28.8 ± 5.0). Perturbations were applied at three different positions (hips, shoulders, and arms) via the load-release paradigm. Twenty measurements were carried out for each perturbation position. We measured peak vertical and horizontal forces on the ground (expressed percentage of body mass (%BM)), peak center of pressure displacement and peak horizontal and vertical velocities at the knee, hip and shoulder joints. The Tai Chi group exhibited smaller increases in vertical ground reaction forces when perturbations were applied at the hips (11.5 ± 2.1 vs. 19.6 ± 5.5 %BW; p = 0.002) and the arms (14.1 ± 4.2 vs. 23.2 ± 8.4 %BW; p = 0.005). They also responded with higher horizontal force increase after hip perturbation (16.2 ± 3.2 vs. 13.1 ± 2.5 %BW; p < 0.001). Similar findings were found when observing various outcomes related to velocities of vertical movement. The Tai Chi group also showed lower speeds of backward movement of the knee (p = 0.005–0.009) after hip (0.49 ± 0.13 vs. 0.85 ± 0.14 m/s; p = 0.005) and arm perturbations (0.97 ± 0.18 vs. 1.71 ± 0.29 m/s; p = 0.005). Center of pressure displacements were similar between groups. Our study demonstrated that engaging in Tai Chi could be beneficial to reactive postural responses after sudden perturbations in a horizontal direction; however, future interventional studies are needed to directly confirm this. Moreover, because of the age difference between the groups, some confounding effects of age cannot be ruled out.

Jamšek, Marko; Kunavar, Tjaša; Blohm, Gunnar; Nozaki, Daichi; Papaxanthis, Charalambos; White, Olivier; Babič, Jan
Effects of Simulated Microgravity and Hypergravity Conditions on Arm Movements in Normogravity Journal Article
In: Frontiers in Neural Circuits, vol. 15, pp. 150, 2021, ISSN: 1662-5110.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning | Links:
@article{10.3389/fncir.2021.750176,
title = {Effects of Simulated Microgravity and Hypergravity Conditions on Arm Movements in Normogravity},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Gunnar Blohm and Daichi Nozaki and Charalambos Papaxanthis and Olivier White and Jan Babi\v{c}},
url = {https://www.frontiersin.org/article/10.3389/fncir.2021.750176},
doi = {10.3389/fncir.2021.750176},
issn = {1662-5110},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Frontiers in Neural Circuits},
volume = {15},
pages = {150},
abstract = {The human sensorimotor control has evolved in the Earth's environment where all movement is influenced by the gravitational force. Changes in this environmental force can severely impact the performance of arm movements which can be detrimental in completing certain tasks such as piloting or controlling complex vehicles. For this reason, subjects that are required to perform such tasks undergo extensive training procedures in order to minimize the chances of failure. We investigated whether local gravity simulation of altered gravitational conditions on the arm would lead to changes in kinematic parameters comparable to the full-body experience of microgravity and hypergravity onboard a parabolic flight. To see if this would be a feasible approach for on-ground training of arm reaching movements in altered gravity conditions we developed a robotic device that was able to apply forces at the wrist in order to simulate micro- or hypergravity conditions for the arm while subjects performed pointing movements on a touch screen. We analyzed and compared the results of several kinematic parameters along with muscle activity using this system with data of the same subjects being fully exposed to microgravity and hypergravity conditions on a parabolic flight. Both in our simulation and in-flight, we observed a significant increase in movement durations in microgravity conditions and increased velocities in hypergravity for upward movements. Additionally, we noted a reduced accuracy of pointing both in-flight and in our simulation. These promising results suggest, that locally simulated altered gravity can elicit similar changes in some movement characteristics for arm reaching movements. This could potentially be exploited as a means of developing devices such as exoskeletons to aid in training individuals prior to undertaking tasks in changed gravitational conditions.},
keywords = {Exoskeleton Design and Control, Human Motor Control, Human Performance Augmentation, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The human sensorimotor control has evolved in the Earth's environment where all movement is influenced by the gravitational force. Changes in this environmental force can severely impact the performance of arm movements which can be detrimental in completing certain tasks such as piloting or controlling complex vehicles. For this reason, subjects that are required to perform such tasks undergo extensive training procedures in order to minimize the chances of failure. We investigated whether local gravity simulation of altered gravitational conditions on the arm would lead to changes in kinematic parameters comparable to the full-body experience of microgravity and hypergravity onboard a parabolic flight. To see if this would be a feasible approach for on-ground training of arm reaching movements in altered gravity conditions we developed a robotic device that was able to apply forces at the wrist in order to simulate micro- or hypergravity conditions for the arm while subjects performed pointing movements on a touch screen. We analyzed and compared the results of several kinematic parameters along with muscle activity using this system with data of the same subjects being fully exposed to microgravity and hypergravity conditions on a parabolic flight. Both in our simulation and in-flight, we observed a significant increase in movement durations in microgravity conditions and increased velocities in hypergravity for upward movements. Additionally, we noted a reduced accuracy of pointing both in-flight and in our simulation. These promising results suggest, that locally simulated altered gravity can elicit similar changes in some movement characteristics for arm reaching movements. This could potentially be exploited as a means of developing devices such as exoskeletons to aid in training individuals prior to undertaking tasks in changed gravitational conditions.
Trošt, Andrej; Jamšek, Marko; Šarabon, Nejc; Babič, Jan
A system to measure the human body asymmetries using accelerometers Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 88, no. 5, pp. 267–272, 2021.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Sport | Links:
@article{Trost2021,
title = {A system to measure the human body asymmetries using accelerometers},
author = {Andrej Tro\v{s}t and Marko Jam\v{s}ek and Nejc \v{S}arabon and Jan Babi\v{c}},
url = {https://ev.fe.uni-lj.si/5-2021/Trost.pdf},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {88},
number = {5},
pages = {267--272},
abstract = {In sports, acute and chronic injuries of athletes are common despite the growing knowledge and interest in the preventive activity in the sports practice. One of the main causes of injuries in athletes are their body asymmetries, which can only be dealt with if properly quantified. Despite the availability of several measuring systems, the majority of them do not allow segmental measurements and those that do are not portable. To solve the issue, a portable measuring system to measure the body asymmetries of the lower part of the human body was designed and manufactured. It measures and stores the data acquired by six accelerometers attached at the foot, tibia and pelvis of the human both legs. The system is compact, lightweight, portable and allowing a local data storage on the measuring device itself and triggering external signal to start the data acquisition. The system is driven by a sophisticated microcontroller that ensures data sampling at a high sampling rate. Results of a preliminary experimental system evaluation and validation are positive and encouraging for its further development and enhancement.},
keywords = {Exoskeleton Design and Control, Sport},
pubstate = {published},
tppubtype = {article}
}
In sports, acute and chronic injuries of athletes are common despite the growing knowledge and interest in the preventive activity in the sports practice. One of the main causes of injuries in athletes are their body asymmetries, which can only be dealt with if properly quantified. Despite the availability of several measuring systems, the majority of them do not allow segmental measurements and those that do are not portable. To solve the issue, a portable measuring system to measure the body asymmetries of the lower part of the human body was designed and manufactured. It measures and stores the data acquired by six accelerometers attached at the foot, tibia and pelvis of the human both legs. The system is compact, lightweight, portable and allowing a local data storage on the measuring device itself and triggering external signal to start the data acquisition. The system is driven by a sophisticated microcontroller that ensures data sampling at a high sampling rate. Results of a preliminary experimental system evaluation and validation are positive and encouraging for its further development and enhancement.
2020
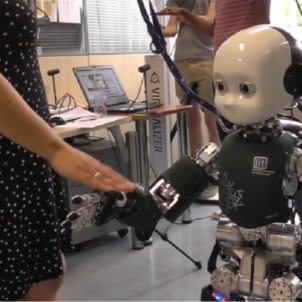
Elobaid, Mohamed; Hu, Yue; Romualdi, Giulio; Dafarra, Stefano; Babič, Jan; Pucci, Daniele
Telexistence and Teleoperation for Walking Humanoid Robots Book Section
In: Advances in Intelligent Systems and Computing, pp. 1106–1121, 2020, ISSN: 21945365.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@incollection{Elobaid2020,
title = {Telexistence and Teleoperation for Walking Humanoid Robots},
author = {Mohamed Elobaid and Yue Hu and Giulio Romualdi and Stefano Dafarra and Jan Babi\v{c} and Daniele Pucci},
url = {http://link.springer.com/10.1007/978-3-030-29513-4_80 http://arxiv.org/abs/1809.01578 http://dx.doi.org/10.1007/978-3-030-29513-4_80},
doi = {10.1007/978-3-030-29513-4_80},
issn = {21945365},
year = {2020},
date = {2020-09-01},
booktitle = {Advances in Intelligent Systems and Computing},
pages = {1106--1121},
abstract = {This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.},
keywords = {Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {incollection}
}
This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.
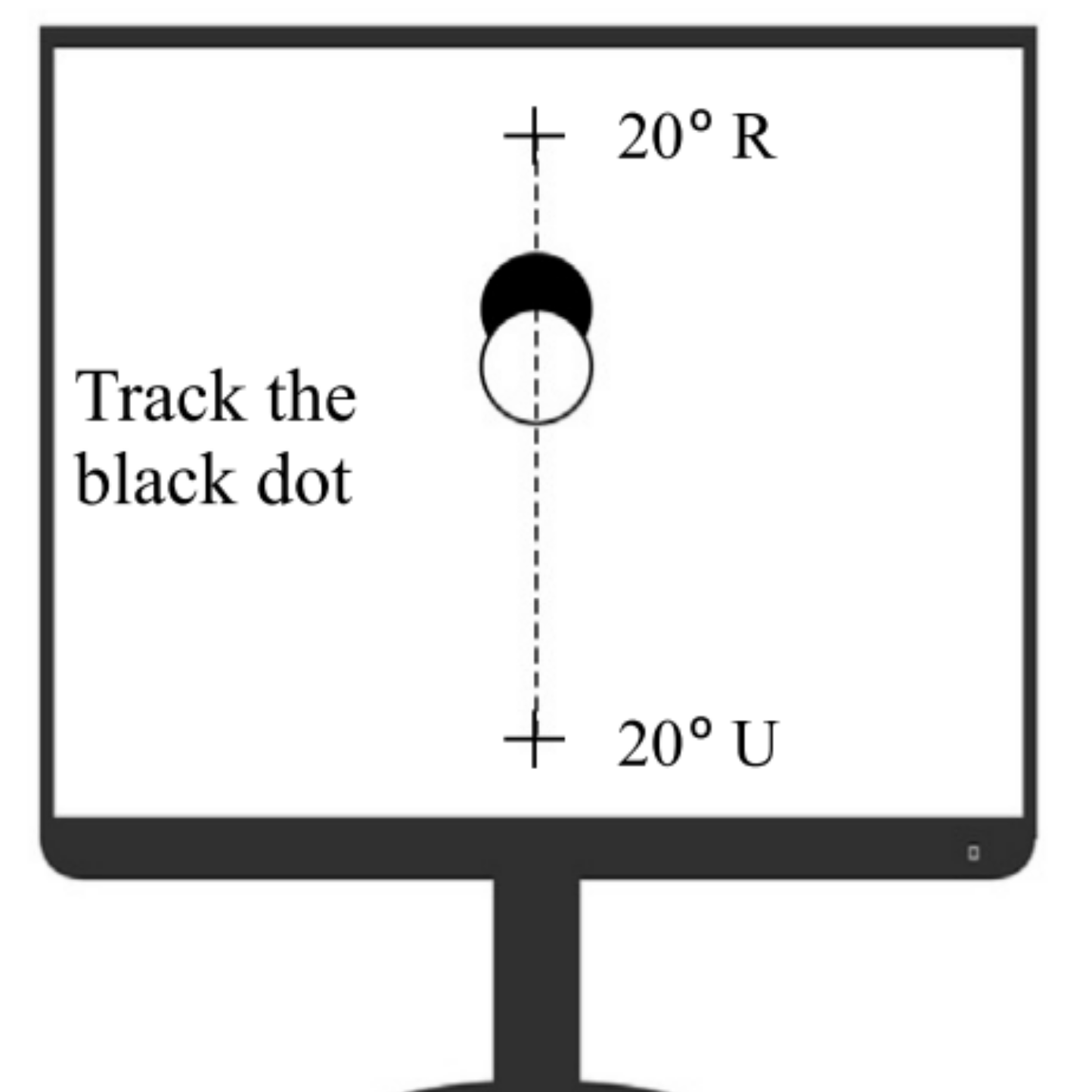
Forman, Davis A; Forman, Garrick N; Avila-Mireles, Edwin Johnatan; Mugnosso, Maddalena; Zenzeri, Jacopo; Murphy, Bernadette; Holmes, Michael W R
Characterizing forearm muscle activity in university-aged males during dynamic radial-ulnar deviation of the wrist using a wrist robot Journal Article
In: Journal of Biomechanics, vol. 108, pp. 109897, 2020, ISSN: 18732380.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020b,
title = {Characterizing forearm muscle activity in university-aged males during dynamic radial-ulnar deviation of the wrist using a wrist robot},
author = {Davis A Forman and Garrick N Forman and Edwin Johnatan Avila-Mireles and Maddalena Mugnosso and Jacopo Zenzeri and Bernadette Murphy and Michael W R Holmes},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020303201},
doi = {10.1016/j.jbiomech.2020.109897},
issn = {18732380},
year = {2020},
date = {2020-07-01},
journal = {Journal of Biomechanics},
volume = {108},
pages = {109897},
abstract = {Functioning as wrist stabilizers, the wrist extensor muscles exhibit higher levels of muscle activity than the flexors in most distal upper-limb tasks. However, this finding has been derived mostly from isometric or wrist flexion-extension protocols, with little consideration for wrist dynamics or radial-ulnar wrist deviations. The purpose of this study was to assess forearm muscle activity during the execution of dynamic wrist radial-ulnar deviation in various forearm orientations (pronation/supination). In 12 healthy university-aged males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic radial-ulnar deviation using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a radial or ulnar direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture influenced the muscles acting upon the hand (FDS/ED), whereas movement phase (concentric-eccentric) and torque direction influenced nearly every muscle. The ECR demonstrated the greatest task-dependency of all forearm muscles, which is possibly reflective of forearm muscle lines of action. Co-contraction ratios were much higher in radial trials than ulnar (Radial: 1.20 ± 0.78, Ulnar: 0.28 ± 0.18, P textless 0.05), suggesting greater FCU and ECU contribution to wrist joint stability in radial-ulnar movement. These findings highlight a greater complexity of wrist extensor function than has previously been reported in isometric work.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Functioning as wrist stabilizers, the wrist extensor muscles exhibit higher levels of muscle activity than the flexors in most distal upper-limb tasks. However, this finding has been derived mostly from isometric or wrist flexion-extension protocols, with little consideration for wrist dynamics or radial-ulnar wrist deviations. The purpose of this study was to assess forearm muscle activity during the execution of dynamic wrist radial-ulnar deviation in various forearm orientations (pronation/supination). In 12 healthy university-aged males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic radial-ulnar deviation using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a radial or ulnar direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture influenced the muscles acting upon the hand (FDS/ED), whereas movement phase (concentric-eccentric) and torque direction influenced nearly every muscle. The ECR demonstrated the greatest task-dependency of all forearm muscles, which is possibly reflective of forearm muscle lines of action. Co-contraction ratios were much higher in radial trials than ulnar (Radial: 1.20 ± 0.78, Ulnar: 0.28 ± 0.18, P textless 0.05), suggesting greater FCU and ECU contribution to wrist joint stability in radial-ulnar movement. These findings highlight a greater complexity of wrist extensor function than has previously been reported in isometric work.
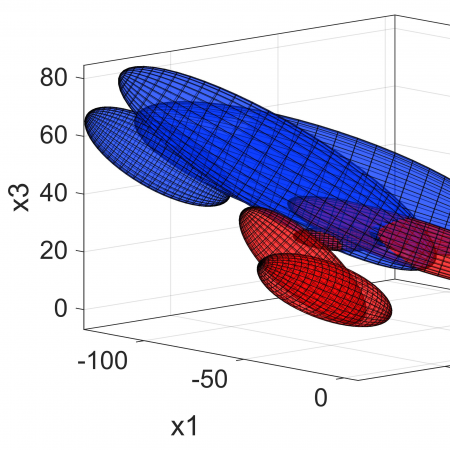
Jamšek, Marko; Petrič, Tadej; Babič, Jan
Gaussian Mixture Models for Control of Quasi-Passive Spinal Exoskeletons Journal Article
In: Sensors, vol. 20, no. 9, pp. 2705, 2020, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Jamsek2020,
title = {Gaussian Mixture Models for Control of Quasi-Passive Spinal Exoskeletons},
author = {Marko Jam\v{s}ek and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {https://www.mdpi.com/711802 https://www.mdpi.com/1424-8220/20/9/2705},
doi = {10.3390/s20092705},
issn = {1424-8220},
year = {2020},
date = {2020-05-01},
urldate = {2020-05-01},
journal = {Sensors},
volume = {20},
number = {9},
pages = {2705},
publisher = {Multidisciplinary Digital Publishing Institute},
abstract = {Research and development of active and passive exoskeletons for preventing work related injuries has steadily increased in the last decade. Recently, new types of quasi-passive designs have been emerging. These exoskeletons use passive viscoelastic elements, such as springs and dampers, to provide support to the user, while using small actuators only to change the level of support or to disengage the passive elements. Control of such devices is still largely unexplored, especially the algorithms that predict the movement of the user, to take maximum advantage of the passive viscoelastic elements. To address this issue, we developed a new control scheme consisting of Gaussian mixture models (GMM) in combination with a state machine controller to identify and classify the movement of the user as early as possible and thus provide a timely control output for the quasi-passive spinal exoskeleton. In a leave-one-out cross-validation procedure, the overall accuracy for providing support to the user was 86 . 72 ± 0 . 86 % (mean ± s.d.) with a sensitivity and specificity of 97 . 46 ± 2 . 09 % and 83 . 15 ± 0 . 85 % respectively. The results of this study indicate that our approach is a promising tool for the control of quasi-passive spinal exoskeletons.},
keywords = {Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Research and development of active and passive exoskeletons for preventing work related injuries has steadily increased in the last decade. Recently, new types of quasi-passive designs have been emerging. These exoskeletons use passive viscoelastic elements, such as springs and dampers, to provide support to the user, while using small actuators only to change the level of support or to disengage the passive elements. Control of such devices is still largely unexplored, especially the algorithms that predict the movement of the user, to take maximum advantage of the passive viscoelastic elements. To address this issue, we developed a new control scheme consisting of Gaussian mixture models (GMM) in combination with a state machine controller to identify and classify the movement of the user as early as possible and thus provide a timely control output for the quasi-passive spinal exoskeleton. In a leave-one-out cross-validation procedure, the overall accuracy for providing support to the user was 86 . 72 ± 0 . 86 % (mean ± s.d.) with a sensitivity and specificity of 97 . 46 ± 2 . 09 % and 83 . 15 ± 0 . 85 % respectively. The results of this study indicate that our approach is a promising tool for the control of quasi-passive spinal exoskeletons.
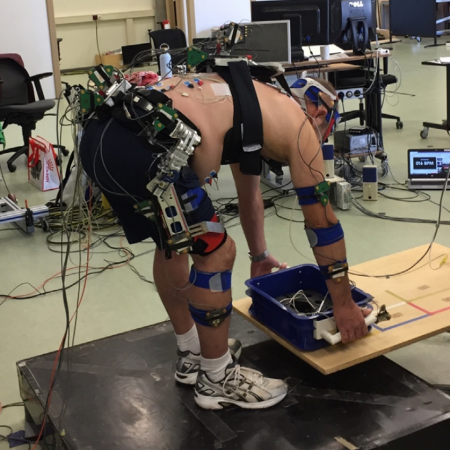
Koopman, Axel S; Naf, Matthias; Baltrusch, Saskia J; Kingma, Idsart; Rodriguez-Guerrero, Carlos; Babič, Jan; de Looze, Michiel P; van Dieen, Jaap H
Biomechanical evaluation of a new passive back support exoskeleton Journal Article
In: Journal of Biomechanics, vol. 105, pp. 109795, 2020, ISSN: 00219290.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Koopman2020,
title = {Biomechanical evaluation of a new passive back support exoskeleton},
author = {Axel S Koopman and Matthias Naf and Saskia J Baltrusch and Idsart Kingma and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Michiel P de Looze and Jaap H van Dieen},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020302153},
doi = {10.1016/j.jbiomech.2020.109795},
issn = {00219290},
year = {2020},
date = {2020-05-01},
urldate = {2020-05-01},
journal = {Journal of Biomechanics},
volume = {105},
pages = {109795},
abstract = {The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13\textendash21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13–21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.
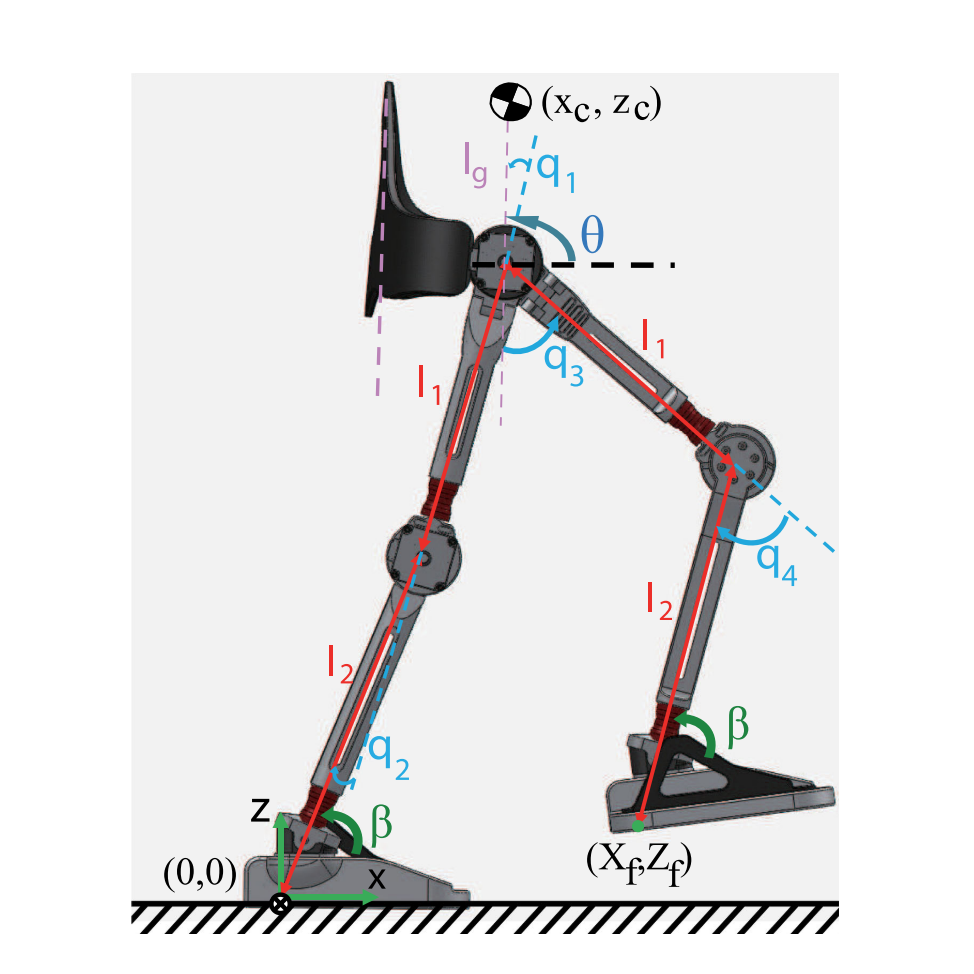
Ugurlu, Barkan; Oshima, Hironori; Sariyildiz, Emre; Narikiyo, Tatsuo; Babič, Jan
Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 50, no. 2, pp. 144–153, 2020, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance | Links:
@article{Ugurlu2020,
title = {Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking},
author = {Barkan Ugurlu and Hironori Oshima and Emre Sariyildiz and Tatsuo Narikiyo and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8960446/},
doi = {10.1109/THMS.2019.2961969},
issn = {2168-2291},
year = {2020},
date = {2020-04-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {50},
number = {2},
pages = {144--153},
abstract = {This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.
![Wearable Robots: Taking a Leap From the Lab to the Real World [From the Guest Editors]](http://nbr.ijs.si/wp-content/uploads/2020/09/Rodriguez-Guerrero2020_image.png)
Rodriguez-Guerrero, Carlos; Babič, Jan; Novak, Domen
Wearable Robots: Taking a Leap From the Lab to the Real World [From the Guest Editors] Journal Article
In: IEEE Robotics & Automation Magazine, vol. 27, no. 1, pp. 20–21, 2020, ISSN: 1070-9932.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Rodriguez-Guerrero2020,
title = {Wearable Robots: Taking a Leap From the Lab to the Real World [From the Guest Editors]},
author = {Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Domen Novak},
url = {https://ieeexplore.ieee.org/document/9040485/},
doi = {10.1109/MRA.2020.2967004},
issn = {1070-9932},
year = {2020},
date = {2020-03-01},
journal = {IEEE Robotics \& Automation Magazine},
volume = {27},
number = {1},
pages = {20--21},
abstract = {The articles present a mix of mechanical design, control algorithms, and human-subject evaluations, thus providing insights into all aspects of wearable robotics for a varied engineering audience.},
keywords = {Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
The articles present a mix of mechanical design, control algorithms, and human-subject evaluations, thus providing insights into all aspects of wearable robotics for a varied engineering audience.

Baltrusch, Saskia J; van Dieen, Jaap H; Koopman, Axel S; Naf, Matthias; Rodriguez-Guerrero, Carlos; Babič, Jan; Houdijk, Han
SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting Journal Article
In: European Journal of Applied Physiology, vol. 120, no. 2, pp. 401–412, 2020, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Baltrusch2020,
title = {SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting},
author = {Saskia J Baltrusch and Jaap H van Dieen and Axel S Koopman and Matthias Naf and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Han Houdijk},
url = {http://link.springer.com/10.1007/s00421-019-04284-6},
doi = {10.1007/s00421-019-04284-6},
issn = {1439-6319},
year = {2020},
date = {2020-02-01},
journal = {European Journal of Applied Physiology},
volume = {120},
number = {2},
pages = {401--412},
abstract = {Besides mechanical loading of the back, physiological strain is an important risk factor for low-back pain. Recently a passive exoskeleton (SPEXOR) has been developed to reduce loading on the low back. We aimed to assess the effect of this device on metabolic cost of repetitive lifting. To explain potential effects, we assessed kinematics, mechanical joint work, and back muscle activity. We recruited ten male employees, working in the luggage handling department of an airline company and having ample experience with lifting tasks at work. Metabolic cost, kinematics, mechanical joint work and muscle activity were measured during a 5-min repetitive lifting task. Participants had to lift and lower a box of 10 kg from ankle height with and without the exoskeleton. Metabolic cost was significantly reduced by 18 % when wearing the exoskeleton. Kinematics did not change significantly, while muscle activity decreased by up to 16 %. The exoskeleton took over 18\textendash25 % of joint work at the hip and L5S1 joints. However, due to large variation in individual responses, we did not find a significant reduction of joint work around the individual joints. Wearing the SPEXOR exoskeleton decreased metabolic cost and might, therefore, reduce fatigue development and contribute to prevention of low-back pain during repetitive lifting tasks. Reduced metabolic cost can be explained by the exoskeleton substituting part of muscle work at the hip and L5S1 joints and consequently decreasing required back muscle activity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Besides mechanical loading of the back, physiological strain is an important risk factor for low-back pain. Recently a passive exoskeleton (SPEXOR) has been developed to reduce loading on the low back. We aimed to assess the effect of this device on metabolic cost of repetitive lifting. To explain potential effects, we assessed kinematics, mechanical joint work, and back muscle activity. We recruited ten male employees, working in the luggage handling department of an airline company and having ample experience with lifting tasks at work. Metabolic cost, kinematics, mechanical joint work and muscle activity were measured during a 5-min repetitive lifting task. Participants had to lift and lower a box of 10 kg from ankle height with and without the exoskeleton. Metabolic cost was significantly reduced by 18 % when wearing the exoskeleton. Kinematics did not change significantly, while muscle activity decreased by up to 16 %. The exoskeleton took over 18–25 % of joint work at the hip and L5S1 joints. However, due to large variation in individual responses, we did not find a significant reduction of joint work around the individual joints. Wearing the SPEXOR exoskeleton decreased metabolic cost and might, therefore, reduce fatigue development and contribute to prevention of low-back pain during repetitive lifting tasks. Reduced metabolic cost can be explained by the exoskeleton substituting part of muscle work at the hip and L5S1 joints and consequently decreasing required back muscle activity.
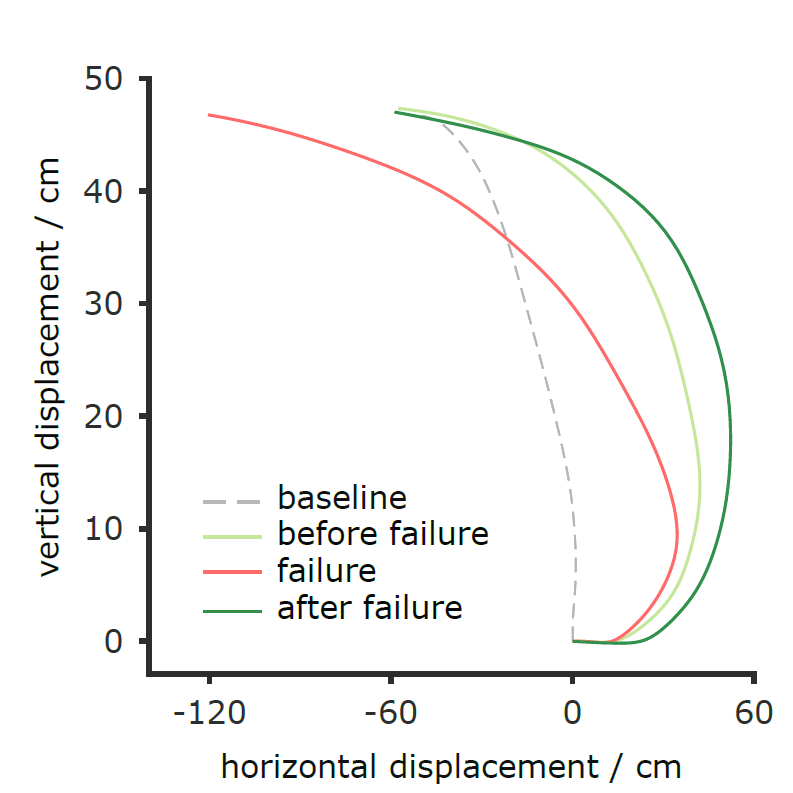
Kunavar, Tjaša; Čamernik, Jernej; Kawato, Mitsuo; Oztop, Erhan; Babič, Jan
Failure as a reinforcement in motor learning Proceedings Article
In: Workshop on Mechanism of Brain and Mind 2020, Rusutsu, Japan, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2020,
title = { Failure as a reinforcement in motor learning},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Mitsuo Kawato and Erhan Oztop and Jan Babi\v{c}},
year = {2020},
date = {2020-01-04},
booktitle = {Workshop on Mechanism of Brain and Mind 2020},
address = {Rusutsu, Japan},
abstract = {Humans initiate movements and actions to satisfy their needs and secure their survival. It is therefore necessary to understand motor learning in terms of ecological fitness, where behaviour that produces desired result gets reinforced. We investigated whether failure can work as an ecological reinforcement. An experimental paradigm for observing sensorimotor control was used to study human motion in terms of ecological fitness. This type of approach allowed us to take into account the risk of injury as a reinforcement mechanism. Series of squat to stand motions were performed by participants. Backward perturbation to the centre of mass (COM) was applied by a waist pulling mechanism. Participants managed to gradually adapt to perturbation. When perturbation was present, there was a displacement in the anterior direction, caused by adaptation to perturbation. Motor behaviour was adapted following a failed outcome, while the motor behaviour that produced a successful result was retained.},
keywords = {Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Humans initiate movements and actions to satisfy their needs and secure their survival. It is therefore necessary to understand motor learning in terms of ecological fitness, where behaviour that produces desired result gets reinforced. We investigated whether failure can work as an ecological reinforcement. An experimental paradigm for observing sensorimotor control was used to study human motion in terms of ecological fitness. This type of approach allowed us to take into account the risk of injury as a reinforcement mechanism. Series of squat to stand motions were performed by participants. Backward perturbation to the centre of mass (COM) was applied by a waist pulling mechanism. Participants managed to gradually adapt to perturbation. When perturbation was present, there was a displacement in the anterior direction, caused by adaptation to perturbation. Motor behaviour was adapted following a failed outcome, while the motor behaviour that produced a successful result was retained.
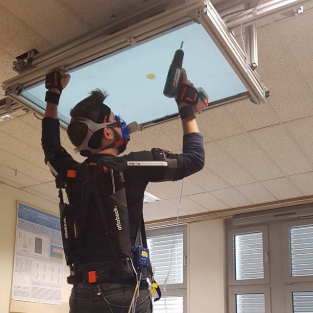
Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Daniele; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 1, pp. 152–164, 2020, ISSN: 1534-4320.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance | Links:
@article{Maurice2020b,
title = {Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Daniele Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8856265/},
doi = {10.1109/TNSRE.2019.2945368},
issn = {1534-4320},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
volume = {28},
number = {1},
pages = {152--164},
address = {Nancy},
abstract = {Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.
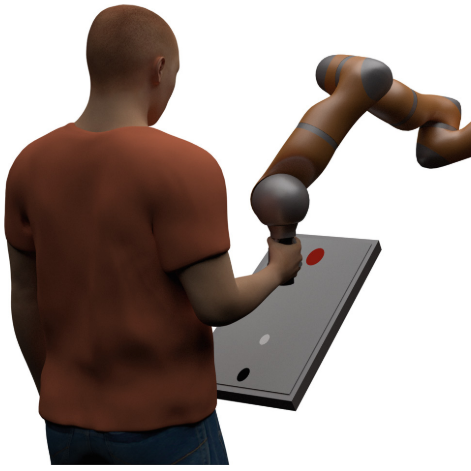
Leskovar, Rebeka Koprivšek; Čamernik, Jernej; Petrič, Tadej
Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two Book Section
In: Mechanisms and Machine Science, vol. 84, pp. 199–207, 2020, ISSN: 22110992.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Physical Human Robot Interaction | Links:
@incollection{KropivsekLeskovar2020,
title = {Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two},
author = {Rebeka Kopriv\v{s}ek Leskovar and Jernej \v{C}amernik and Tadej Petri\v{c}},
url = {http://link.springer.com/10.1007/978-3-030-48989-2_22},
doi = {10.1007/978-3-030-48989-2_22},
issn = {22110992},
year = {2020},
date = {2020-01-01},
booktitle = {Mechanisms and Machine Science},
volume = {84},
pages = {199--207},
abstract = {In this paper we examine physical collaboration between two individuals using a dual-arm robot as a haptic interface. First, we design a haptic controller based on a virtual dynamic model of the robot arms. Then, we analyse dyadic human-human collaboration with a reaching task on a 2D plane, where the distance and size of the target changed randomly from a pool of nine reachable positions and sizes. Each subject performed the task individually and linked through the guided robot arms with a virtual model to perform the same task in collaboration. We evaluated both, individual and collaborative performances, based on Fitts' law, which describes the relation between the speed of motion and its accuracy. The results show that the Fitts' law applies to both, individual and collaborative tasks, with their performance improving when in collaboration.},
keywords = {Human Motor Control, Kinematics, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {incollection}
}
In this paper we examine physical collaboration between two individuals using a dual-arm robot as a haptic interface. First, we design a haptic controller based on a virtual dynamic model of the robot arms. Then, we analyse dyadic human-human collaboration with a reaching task on a 2D plane, where the distance and size of the target changed randomly from a pool of nine reachable positions and sizes. Each subject performed the task individually and linked through the guided robot arms with a virtual model to perform the same task in collaboration. We evaluated both, individual and collaborative performances, based on Fitts' law, which describes the relation between the speed of motion and its accuracy. The results show that the Fitts' law applies to both, individual and collaborative tasks, with their performance improving when in collaboration.

Forman, Davis A; Forman, Garrick N; Avila-Mireles, Edwin Johnatan; Mugnosso, Maddalena; Zenzeri, Jacopo; Murphy, Bernadette; Holmes, Michael W R
Characterizing forearm muscle activity in young adults during dynamic wrist flexion–extension movement using a wrist robot Journal Article
In: Journal of Biomechanics, vol. 108, pp. 109908, 2020, ISSN: 18732380.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020,
title = {Characterizing forearm muscle activity in young adults during dynamic wrist flexion\textendashextension movement using a wrist robot},
author = {Davis A Forman and Garrick N Forman and Edwin Johnatan Avila-Mireles and Maddalena Mugnosso and Jacopo Zenzeri and Bernadette Murphy and Michael W R Holmes},
url = {https://doi.org/10.1016/j.jbiomech.2020.109908},
doi = {10.1016/j.jbiomech.2020.109908},
issn = {18732380},
year = {2020},
date = {2020-01-01},
journal = {Journal of Biomechanics},
volume = {108},
pages = {109908},
publisher = {Elsevier Ltd},
abstract = {Current research suggests that the wrist extensor muscles function as the primary stabilizers of the wrist-joint complex. However, most investigations have utilized isometric study designs, with little consideration for wrist dynamics or changes in posture. The purpose of the present study was to assess forearm muscle activity during the execution of dynamic wrist flexion/extension in multiple forearm orientations (pronation/supination). In 12 young adult males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic wrist flexion/extension using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a flexion or extension direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture had minimal influence on forearm muscle activity, but significantly altered the activity of the biceps and triceps brachii. Movement phase (concentric-eccentric) dictated muscle activity in every muscle. Interestingly, muscle activity in the eccentric phase was equal between the two applied handle torques, regardless of whether the muscle acted as the agonist or antagonist. Co-contraction ratios were higher in the flexion conditions (flexion: 2.28 ± 2.04, extension: 0.32 ± 0.27), suggesting significantly greater wrist extensor activity\textendashlikely a contribution to wrist joint stability. This highlights the vulnerability of the wrist extensor muscles to overuse injuries in settings requiring prolonged use of dynamic wrist exertions.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Current research suggests that the wrist extensor muscles function as the primary stabilizers of the wrist-joint complex. However, most investigations have utilized isometric study designs, with little consideration for wrist dynamics or changes in posture. The purpose of the present study was to assess forearm muscle activity during the execution of dynamic wrist flexion/extension in multiple forearm orientations (pronation/supination). In 12 young adult males, surface electromyography (EMG) was recorded from eight muscles of the dominant arm: flexor carpi radialis (FCR), flexor carpi ulnaris (FCU), flexor digitorum superficialis (FDS), extensor carpi radialis (ECR), extensor carpi ulnaris (ECU), extensor digitorum (ED), biceps brachii (BB) and triceps brachii (TB). While grasping a handle, participants performed dynamic wrist flexion/extension using a three-degrees-of-freedom wrist manipulandum. The robotic device applied torque to the handle, in either a flexion or extension direction, and in one of three forearm postures (30° supinated/neutral/30° pronated). Results indicated that forearm posture had minimal influence on forearm muscle activity, but significantly altered the activity of the biceps and triceps brachii. Movement phase (concentric-eccentric) dictated muscle activity in every muscle. Interestingly, muscle activity in the eccentric phase was equal between the two applied handle torques, regardless of whether the muscle acted as the agonist or antagonist. Co-contraction ratios were higher in the flexion conditions (flexion: 2.28 ± 2.04, extension: 0.32 ± 0.27), suggesting significantly greater wrist extensor activity–likely a contribution to wrist joint stability. This highlights the vulnerability of the wrist extensor muscles to overuse injuries in settings requiring prolonged use of dynamic wrist exertions.
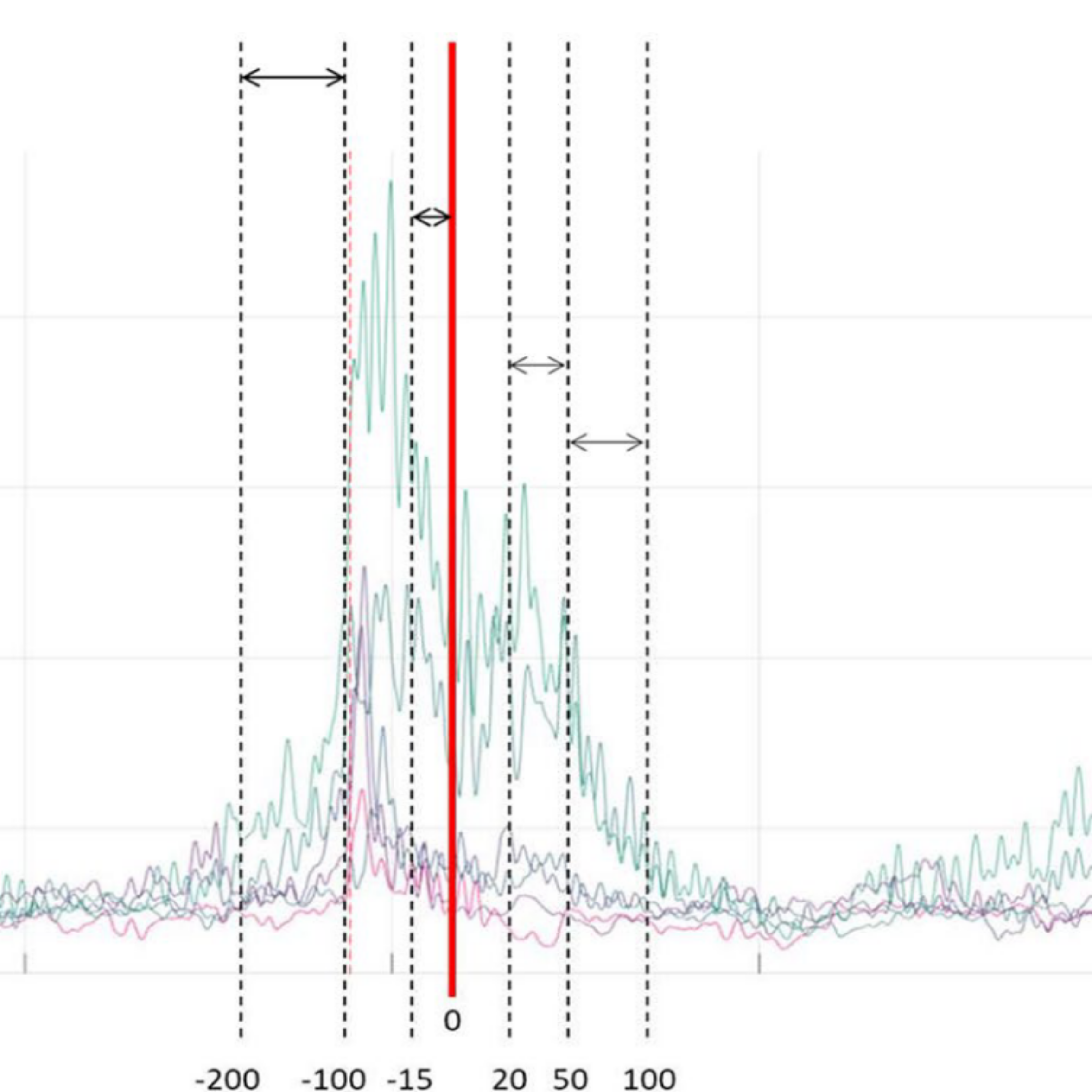
Forman, Garrick N; Forman, Davis A; Avila-Mireles, Edwin Johnatan; Zenzeri, Jacopo; Holmes, Michael W R
Investigating the Muscular and Kinematic Responses to Sudden Wrist Perturbations During a Dynamic Tracking Task Journal Article
In: Scientific Reports, vol. 10, no. 1, pp. 1-13, 2020, ISSN: 20452322.
Abstract | BibTeX | Tags: Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Forman2020a,
title = {Investigating the Muscular and Kinematic Responses to Sudden Wrist Perturbations During a Dynamic Tracking Task},
author = {Garrick N Forman and Davis A Forman and Edwin Johnatan Avila-Mireles and Jacopo Zenzeri and Michael W R Holmes},
url = {http://dx.doi.org/10.1038/s41598-020-61117-9},
doi = {10.1038/s41598-020-61117-9},
issn = {20452322},
year = {2020},
date = {2020-01-01},
journal = {Scientific Reports},
volume = {10},
number = {1},
pages = {1-13},
publisher = {Springer US},
abstract = {Sudden disturbances (perturbations) to the hand and wrist are commonplace in daily activities and workplaces when interacting with tools and the environment. It is important to understand how perturbations influence forearm musculature and task performance when identifying injury mechanisms. The purpose of this work was to evaluate changes in forearm muscle activity and co-contraction caused by wrist perturbations during a dynamic wrist tracking task. Surface electromyography was recorded from eight muscles of the upper-limb. Participants performed trials consisting of 17 repetitions of ±40° of wrist flexion/extension using a robotic device. During trials, participants received radial or ulnar perturbations that were delivered during flexion or extension, and with known or unknown timing. Co-contraction ratios for all muscle pairs showed significantly greater extensor activity across all experimental conditions. Of all antagonistic muscle pairs, the flexor carpi radialis (FCR)-extensor carpi radialis (ECR) muscle pair had the greatest change in co-contraction, producing 1602% greater co-contraction during flexion trials than during extensions trials. Expected perturbations produced greater anticipatory (immediately prior to the perturbation) muscle activity than unexpected, resulting in a 30% decrease in wrist displacement. While improving performance, this increase in anticipatory muscle activity may leave muscles susceptible to early-onset fatigue, which could lead to chronic overuse injuries in the workplace.},
keywords = {Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Sudden disturbances (perturbations) to the hand and wrist are commonplace in daily activities and workplaces when interacting with tools and the environment. It is important to understand how perturbations influence forearm musculature and task performance when identifying injury mechanisms. The purpose of this work was to evaluate changes in forearm muscle activity and co-contraction caused by wrist perturbations during a dynamic wrist tracking task. Surface electromyography was recorded from eight muscles of the upper-limb. Participants performed trials consisting of 17 repetitions of ±40° of wrist flexion/extension using a robotic device. During trials, participants received radial or ulnar perturbations that were delivered during flexion or extension, and with known or unknown timing. Co-contraction ratios for all muscle pairs showed significantly greater extensor activity across all experimental conditions. Of all antagonistic muscle pairs, the flexor carpi radialis (FCR)-extensor carpi radialis (ECR) muscle pair had the greatest change in co-contraction, producing 1602% greater co-contraction during flexion trials than during extensions trials. Expected perturbations produced greater anticipatory (immediately prior to the perturbation) muscle activity than unexpected, resulting in a 30% decrease in wrist displacement. While improving performance, this increase in anticipatory muscle activity may leave muscles susceptible to early-onset fatigue, which could lead to chronic overuse injuries in the workplace.

Galli, G.; Cakmak, Y. O.; Babič, Jan; Pazzaglia, M.
Editorial: Embodying Tool Use: From Cognition to Neurorehabilitation Journal Article
In: Frontiers in Human Neuroscience, vol. 14, 2020, ISSN: 16625161.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Galli2020,
title = {Editorial: Embodying Tool Use: From Cognition to Neurorehabilitation},
author = {G. Galli and Y. O. Cakmak and Jan Babi\v{c} and M. Pazzaglia},
doi = {10.3389/fnhum.2020.585670},
issn = {16625161},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {14},
abstract = {This Research Topic collects an impressive body ofliterature on “Embodying Tool Use.” Overall, the contributions extend and enrich the previous multidisciplinary approach and translational applications. However, despite the significant progress made in our understanding and the real-world relevance, there are boundless directions, endless possibilities, and exciting challenges yet to be explored in future research.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
This Research Topic collects an impressive body ofliterature on “Embodying Tool Use.” Overall, the contributions extend and enrich the previous multidisciplinary approach and translational applications. However, despite the significant progress made in our understanding and the real-world relevance, there are boundless directions, endless possibilities, and exciting challenges yet to be explored in future research.
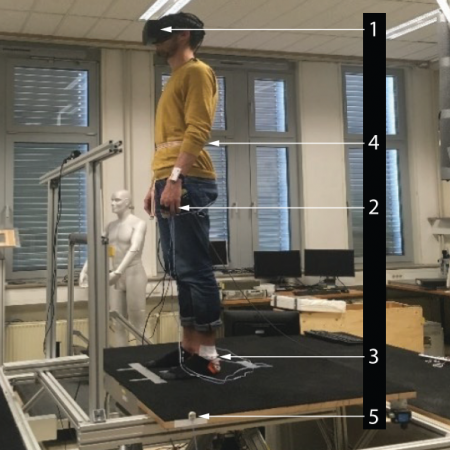
Čamernik, Jernej; Kezić, Sanja; Babič, Jan
Impact of the virtual-height exposure on human psychophysical parameters Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 87, no. 5, pp. 267–274, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Camernik2020,
title = {Impact of the virtual-height exposure on human psychophysical parameters},
author = {Jernej \v{C}amernik and Sanja Kezi\'{c} and Jan Babi\v{c}},
url = {https://ev.fe.uni-lj.si/5-2020/Camernik.pdf},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {87},
number = {5},
pages = {267--274},
abstract = {The study evaluates the impact of the virtual height on the human postural control by analyzing the human physiological and psychological responses. Combining the virtual reality and a robotic platform, an environment is created in which a human is seemingly raised to a height of three meters, to affect the human's multi-sensory perception of a movement in the space, causing or enhancing the human's psychophysical responses to an environment at change. A short test is made to monitor the postural control of 20 volunteers during an event of a simultaneous sudden jerk of a robotic platform and a visual change in the height. The data are recorded before and after the event and the results are compared. Using force-plates and an optical system for capturing the volunteer's movement, the movements of forces on the ground and the volunteer's body mass (COP and COM) are observed. Their average values, average power spectrum frequency (MPF) and the root mean square values (RMS) are analyzed. Before and after a virtual rise, the state of the volunteer's current and general perception of anxiety is evaluated with a questionnaire to determine their level of anxiety, electrodermal activity (EDA) and skinsurface temperature. It is shown, that immediately after the volunteer's exposure to a virtual height, their anxiety, fear, skin conductivity and average frequency spectrum of the COP and COM movement increase and their stability, confidence, temperature and RMS values of COP and COM decrease. The volunteer's physiological response to their height perception is also reflected in the change in the mean values of the COP and COM movement in the anterior-posterior direction after they lean backwards, i.e. away from the edge, immediately after lifting. Our study results show that changes in the human emotional and physiological state, as a consequence of a postural threat, and simultaneously also an increase in the human postural control, occur even in humans who are not afraid of the height.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The study evaluates the impact of the virtual height on the human postural control by analyzing the human physiological and psychological responses. Combining the virtual reality and a robotic platform, an environment is created in which a human is seemingly raised to a height of three meters, to affect the human's multi-sensory perception of a movement in the space, causing or enhancing the human's psychophysical responses to an environment at change. A short test is made to monitor the postural control of 20 volunteers during an event of a simultaneous sudden jerk of a robotic platform and a visual change in the height. The data are recorded before and after the event and the results are compared. Using force-plates and an optical system for capturing the volunteer's movement, the movements of forces on the ground and the volunteer's body mass (COP and COM) are observed. Their average values, average power spectrum frequency (MPF) and the root mean square values (RMS) are analyzed. Before and after a virtual rise, the state of the volunteer's current and general perception of anxiety is evaluated with a questionnaire to determine their level of anxiety, electrodermal activity (EDA) and skinsurface temperature. It is shown, that immediately after the volunteer's exposure to a virtual height, their anxiety, fear, skin conductivity and average frequency spectrum of the COP and COM movement increase and their stability, confidence, temperature and RMS values of COP and COM decrease. The volunteer's physiological response to their height perception is also reflected in the change in the mean values of the COP and COM movement in the anterior-posterior direction after they lean backwards, i.e. away from the edge, immediately after lifting. Our study results show that changes in the human emotional and physiological state, as a consequence of a postural threat, and simultaneously also an increase in the human postural control, occur even in humans who are not afraid of the height.
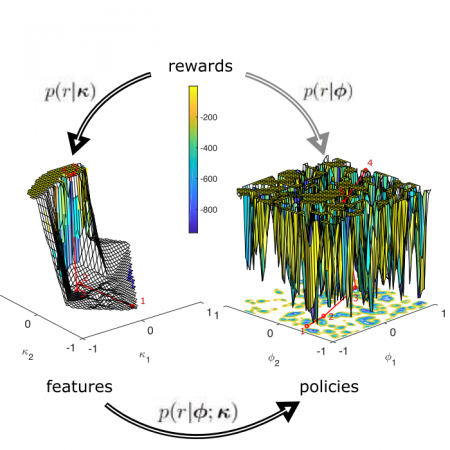
Rottmann, Nils; Kunavar, Tjaša; Babič, Jan; Peters, Jan; Rueckert, Elmar
Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article
In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5490–5496, 2020.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Postural Balance | Links:
@inproceedings{9341335,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {Nils Rottmann and Tja\v{s}a Kunavar and Jan Babi\v{c} and Jan Peters and Elmar Rueckert},
doi = {10.1109/IROS45743.2020.9341335},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {5490--5496},
abstract = {Learning control policies in robotic tasks requires a large number of interactions due to small learning rates, bounds on the updates or unknown constraints. In contrast humans can infer protective and safe solutions after a single failure or unexpected observation. In order to reach similar performance, we developed a hierarchical Bayesian optimization algorithm that replicates the cognitive inference and memorization process for avoiding failures in motor control tasks. A Gaussian Process implements the modeling and the sampling of the acquisition function. This enables rapid learning with large learning rates while a mental replay phase ensures that policy regions that led to failures are inhibited during the sampling process. The features of the hierarchical Bayesian optimization method are evaluated in a simulated and physiological humanoid postural balancing task. The method out- performs standard optimization techniques, such as Bayesian Optimization, in the number of interactions to solve the task, in the computational demands and in the frequency of observed failures. Further, we show that our method performs similar to humans for learning the postural balancing task by comparing our simulation results with real human data.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Learning control policies in robotic tasks requires a large number of interactions due to small learning rates, bounds on the updates or unknown constraints. In contrast humans can infer protective and safe solutions after a single failure or unexpected observation. In order to reach similar performance, we developed a hierarchical Bayesian optimization algorithm that replicates the cognitive inference and memorization process for avoiding failures in motor control tasks. A Gaussian Process implements the modeling and the sampling of the acquisition function. This enables rapid learning with large learning rates while a mental replay phase ensures that policy regions that led to failures are inhibited during the sampling process. The features of the hierarchical Bayesian optimization method are evaluated in a simulated and physiological humanoid postural balancing task. The method out- performs standard optimization techniques, such as Bayesian Optimization, in the number of interactions to solve the task, in the computational demands and in the frequency of observed failures. Further, we show that our method performs similar to humans for learning the postural balancing task by comparing our simulation results with real human data.
2019
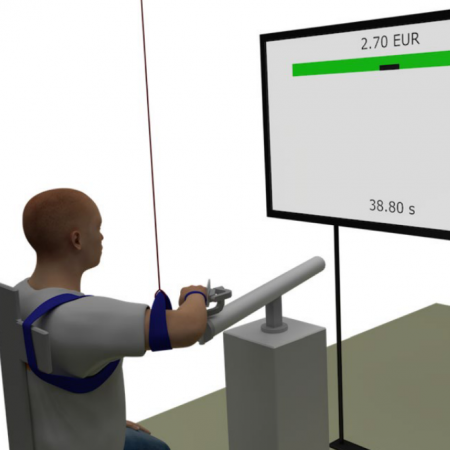
Peternel, Luka; Babič, Jan
Target of initial sub-movement in multi-component arm-reaching strategy Journal Article
In: Scientific Reports, vol. 9, no. 1, pp. 20101, 2019, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning | Links:
@article{Peternel2019,
title = {Target of initial sub-movement in multi-component arm-reaching strategy},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://www.nature.com/articles/s41598-019-56430-x},
doi = {10.1038/s41598-019-56430-x},
issn = {2045-2322},
year = {2019},
date = {2019-12-01},
urldate = {2019-12-01},
journal = {Scientific Reports},
volume = {9},
number = {1},
pages = {20101},
abstract = {Goal-directed human reaching often involves multi-component strategy with sub-movements. in general, the initial sub-movement is fast and less precise to bring the limb's endpoint in the vicinity of the target as soon as possible. The final sub-movement then corrects the error accumulated during the previous sub-movement in order to reach the target. We investigate properties of a temporary target of the initial sub-movement. We hypothesise that the peak spatial dispersion of movement trajectories in the axis perpendicular to the movement is in front of the final reaching target, and that it indicates the temporary target of the initial sub-movement. the reasoning is that the dispersion accumulates, due to signal-dependent noise during the initial sub-movement, until the final corrective sub-movement is initiated, which then reduces the dispersion to successfully reach the actual target. We also hypothesise that the reaching movement distance and size of the actual target affect the properties of the temporary target of the initial sub-movement. the increased reaching movement distance increases the magnitude of peak dispersion and moves its location away from the actual target. on the other hand, the increased target size increases the magnitude of peak dispersion and moves its location closer to the actual target.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Goal-directed human reaching often involves multi-component strategy with sub-movements. in general, the initial sub-movement is fast and less precise to bring the limb's endpoint in the vicinity of the target as soon as possible. The final sub-movement then corrects the error accumulated during the previous sub-movement in order to reach the target. We investigate properties of a temporary target of the initial sub-movement. We hypothesise that the peak spatial dispersion of movement trajectories in the axis perpendicular to the movement is in front of the final reaching target, and that it indicates the temporary target of the initial sub-movement. the reasoning is that the dispersion accumulates, due to signal-dependent noise during the initial sub-movement, until the final corrective sub-movement is initiated, which then reduces the dispersion to successfully reach the actual target. We also hypothesise that the reaching movement distance and size of the actual target affect the properties of the temporary target of the initial sub-movement. the increased reaching movement distance increases the magnitude of peak dispersion and moves its location away from the actual target. on the other hand, the increased target size increases the magnitude of peak dispersion and moves its location closer to the actual target.
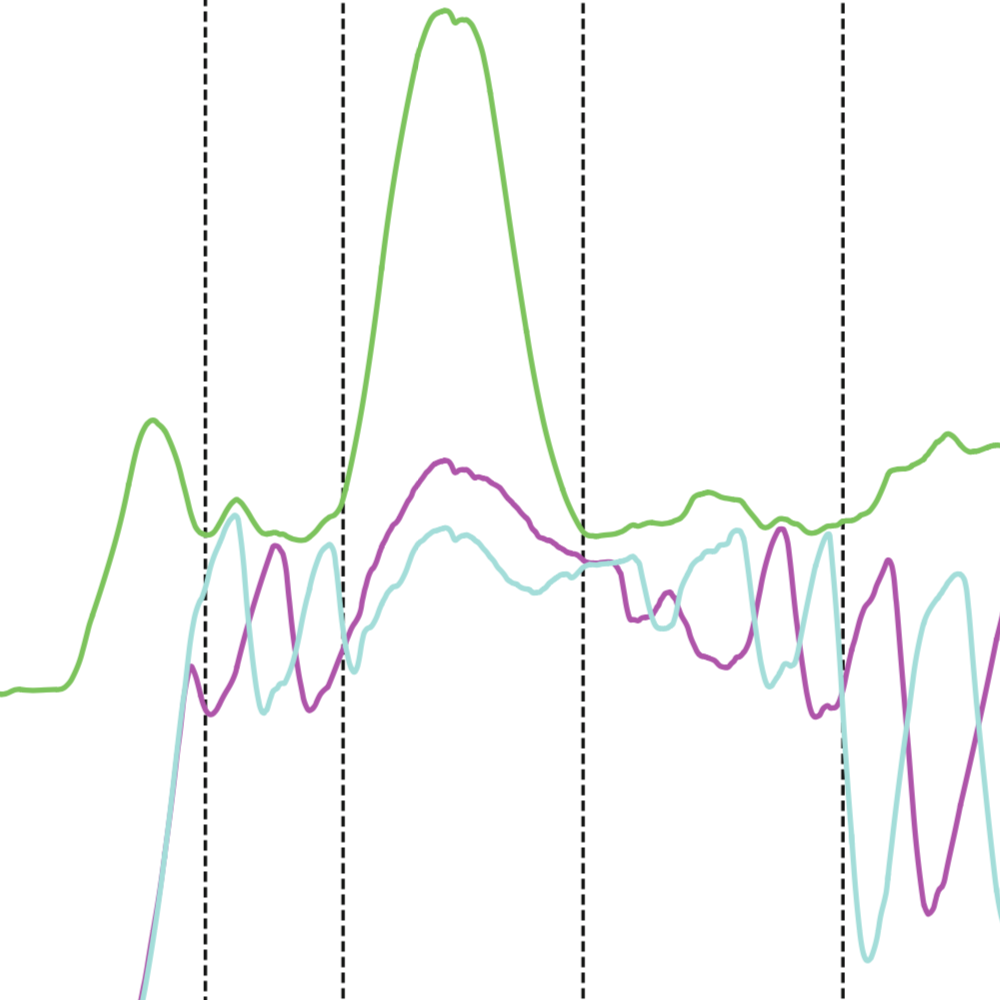
Cevzar, Mišel; Petrič, Tadej; Jamšek, Marko; Babič, Jan
Real-Time Control of Quasi-Active Hip Exoskeleton Based on Gaussian Mixture Model Approach Book Section
In: Wearable Robotics: Challenges and Trends, pp. 244–248, Springer, Cham, 2019.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Machine Learning | Links:
@incollection{Cevzar2019,
title = {Real-Time Control of Quasi-Active Hip Exoskeleton Based on Gaussian Mixture Model Approach},
author = {Mi\v{s}el Cevzar and Tadej Petri\v{c} and Marko Jam\v{s}ek and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/978-3-030-01887-0_47},
doi = {10.1007/978-3-030-01887-0_47},
year = {2019},
date = {2019-10-01},
booktitle = {Wearable Robotics: Challenges and Trends},
pages = {244--248},
publisher = {Springer, Cham},
abstract = {Lower back pain is a major cause of disability and sick day absences. As lower back pain can result in decreased life quality as well as lower industrial productivity, multiple research groups and companies are looking into possible solutions. One of such solutions could be exoskeletons, that engage and disengage the actuators depending on the movements performed by the user. Otherwise we risk hindering the users movements and increasing his metabolic costs. We implemented an exoskeleton control using finite state machine combined with a Gaussian mixture model movement classifier. By conducting a test battery with a subject wearing the exoskeleton we were able to engage the exoskeleton actuators when appropriate and keep them disengaged to allow a full and unhindered range of motion. The results show our exoskeleton control correctly engages and disengages actuators based on the movements being performed by the user.},
keywords = {Exoskeleton Design and Control, Machine Learning},
pubstate = {published},
tppubtype = {incollection}
}
Lower back pain is a major cause of disability and sick day absences. As lower back pain can result in decreased life quality as well as lower industrial productivity, multiple research groups and companies are looking into possible solutions. One of such solutions could be exoskeletons, that engage and disengage the actuators depending on the movements performed by the user. Otherwise we risk hindering the users movements and increasing his metabolic costs. We implemented an exoskeleton control using finite state machine combined with a Gaussian mixture model movement classifier. By conducting a test battery with a subject wearing the exoskeleton we were able to engage the exoskeleton actuators when appropriate and keep them disengaged to allow a full and unhindered range of motion. The results show our exoskeleton control correctly engages and disengages actuators based on the movements being performed by the user.

Jamšek, Marko; Babič, Jan
Human Trunk Stabilization with Hip Exoskeleton for Enhanced Postural Control Book Section
In: Wearable Robotics: Challenges and Trends, pp. 450–454, Springer, Cham, 2019.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Postural Balance | Links:
@incollection{Jamsek2019,
title = {Human Trunk Stabilization with Hip Exoskeleton for Enhanced Postural Control},
author = {Marko Jam\v{s}ek and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/978-3-030-01887-0_87},
doi = {10.1007/978-3-030-01887-0_87},
year = {2019},
date = {2019-10-01},
booktitle = {Wearable Robotics: Challenges and Trends},
pages = {450--454},
publisher = {Springer, Cham},
abstract = {Tripping is a major cause of falls in elderly people. Considering that fall related injuries have severe consequences on their quality of life, there is an urgent need to develop preventive solutions. One such solution could be the use of assistive exoskeletons. In this work we investigated the effects of a hip exoskeleton on human posture under the influence of an external perturbation. During normal standing of a subject we applied a forward pulling force at the chest and then enabled or disabled the exoskeleton randomly. By analysing the kinematics of the human body we compared responses to perturbations when the exoskeleton was enabled or disabled. The results show that the exoskeleton efficiently reduced the forward inclination of the trunk by 40%.},
keywords = {Exoskeleton Design and Control, Postural Balance},
pubstate = {published},
tppubtype = {incollection}
}
Tripping is a major cause of falls in elderly people. Considering that fall related injuries have severe consequences on their quality of life, there is an urgent need to develop preventive solutions. One such solution could be the use of assistive exoskeletons. In this work we investigated the effects of a hip exoskeleton on human posture under the influence of an external perturbation. During normal standing of a subject we applied a forward pulling force at the chest and then enabled or disabled the exoskeleton randomly. By analysing the kinematics of the human body we compared responses to perturbations when the exoskeleton was enabled or disabled. The results show that the exoskeleton efficiently reduced the forward inclination of the trunk by 40%.

Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Danielle; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Evaluation of PAEXO, a novel passive exoskeleton for overhead work Journal Article
In: Computer Methods in Biomechanics and Biomedical Engineering, vol. 22, no. sup1, pp. S448–S450, 2019, ISSN: 1025-5842.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Maurice2019a,
title = {Evaluation of PAEXO, a novel passive exoskeleton for overhead work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Danielle Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://doi.org/10.1080/10255842.2020.1714977 https://www.tandfonline.com/doi/full/10.1080/10255842.2020.1714977},
doi = {10.1080/10255842.2020.1714977},
issn = {1025-5842},
year = {2019},
date = {2019-10-01},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
volume = {22},
number = {sup1},
pages = {S448--S450},
publisher = {Taylor \& Francis},
abstract = {Assessment of physical, physiological, and psycho-logical aspects in the lab study suggest that PAEXO is a promising solution to reduce shoulder WMSDs among overhead workers. An inverse dynamics ana- lysis is being conducted to estimate joint torques from whole-body kinematics and ground reaction force to complement the present assessment. Data collected during field-testing with industrial workers are currently analyzed to evaluate the impact of PAEXO on real end-users.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Assessment of physical, physiological, and psycho-logical aspects in the lab study suggest that PAEXO is a promising solution to reduce shoulder WMSDs among overhead workers. An inverse dynamics ana- lysis is being conducted to estimate joint torques from whole-body kinematics and ground reaction force to complement the present assessment. Data collected during field-testing with industrial workers are currently analyzed to evaluate the impact of PAEXO on real end-users.
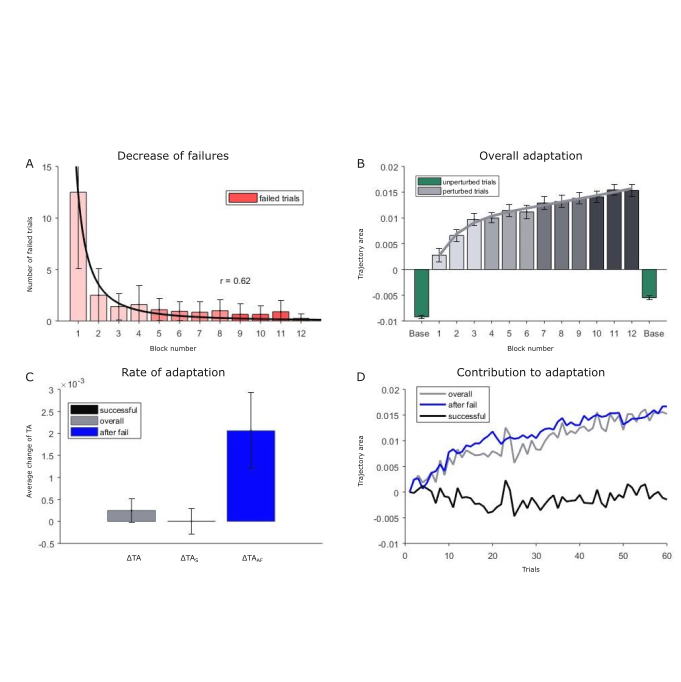
Kunavar, Tjaša; Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Characteristics of human whole body motor learning Proceedings Article
In: Turkey Robotics Conference, TORK 2019, Özyegin University, Istanbul, 2019.
Abstract | BibTeX | Tags: Dynamic Motion, Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2019b,
title = { Characteristics of human whole body motor learning},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2019},
date = {2019-06-01},
booktitle = {Turkey Robotics Conference, TORK 2019},
address = {\"{O}zyegin University, Istanbul},
abstract = {Human whole body movement was observed in order to better understand how humans are able to learn motion and adapt to perturbation. This paper presents preliminary results of our experiment and a simple dynamic model that can simulate motion trajectories.},
keywords = {Dynamic Motion, Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Human whole body movement was observed in order to better understand how humans are able to learn motion and adapt to perturbation. This paper presents preliminary results of our experiment and a simple dynamic model that can simulate motion trajectories.
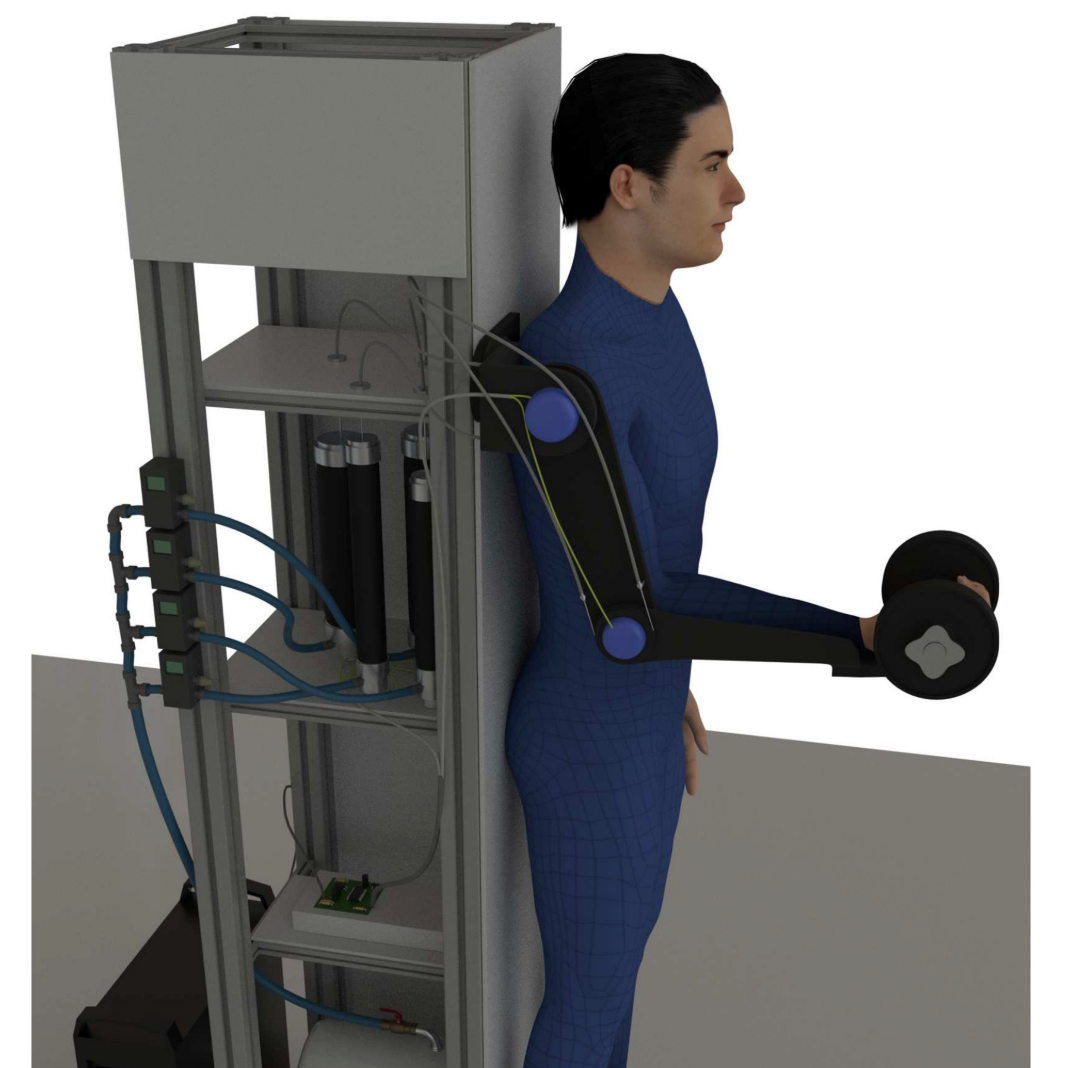
Petrič, Tadej; Peternel, Luka; Morimoto, Jun; Babič, Jan
Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability Journal Article
In: Frontiers in Neurorobotics, vol. 13, pp. 30, 2019, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Performance Augmentation, Optimal Control | Links:
@article{Petric2019,
title = {Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability},
author = {Tadej Petri\v{c} and Luka Peternel and Jun Morimoto and Jan Babi\v{c}},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2019.00030/full https://www.frontiersin.org/articles/10.3389/fnbot.2019.00030/full?\&utm_source=Email_to_authors_\&utm_medium=Email\&utm_content=T1_11.5e1_author\&utm_campaign=Email_publication\&field=\&journalName=Frontiers_in_Neurorobotics\&id=451266},
doi = {10.3389/fnbot.2019.00030},
issn = {1662-5218},
year = {2019},
date = {2019-05-01},
journal = {Frontiers in Neurorobotics},
volume = {13},
pages = {30},
publisher = {Frontiers},
abstract = {This paper introduces a novel control framework for an arm exoskeleton that takes into account force of the human arm. In contrast to the conventional exoskeleton controllers where the assistance is provided without considering the human arm biomechanical force manipulability properties, we propose a control approach based on the arm muscular manipulability. The proposed control framework essentially reshapes the anisotropic force manipulability into the endpoint force manipulability that is invariant with respect to the direction in the entire workspace of the arm. This allows users of the exoskeleton to perform tasks effectively in the whole range of the workspace, even in areas that are normally unsuitable due to the low force manipulability of the human arm. We evaluated the proposed control framework with real robot experiments where subjects wearing an arm exoskeleton were asked to move a weight between several locations. The results show that the proposed control framework does not affect the normal movement behavior of the users while effectively reduces user effort in the area of low manipulability.Particularly, the proposed approach augments the human arm force manipulability to execute tasks equally well in the entire workspace of the arm.},
keywords = {Compliance and Impedance Control, Human Performance Augmentation, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
This paper introduces a novel control framework for an arm exoskeleton that takes into account force of the human arm. In contrast to the conventional exoskeleton controllers where the assistance is provided without considering the human arm biomechanical force manipulability properties, we propose a control approach based on the arm muscular manipulability. The proposed control framework essentially reshapes the anisotropic force manipulability into the endpoint force manipulability that is invariant with respect to the direction in the entire workspace of the arm. This allows users of the exoskeleton to perform tasks effectively in the whole range of the workspace, even in areas that are normally unsuitable due to the low force manipulability of the human arm. We evaluated the proposed control framework with real robot experiments where subjects wearing an arm exoskeleton were asked to move a weight between several locations. The results show that the proposed control framework does not affect the normal movement behavior of the users while effectively reduces user effort in the area of low manipulability.Particularly, the proposed approach augments the human arm force manipulability to execute tasks equally well in the entire workspace of the arm.
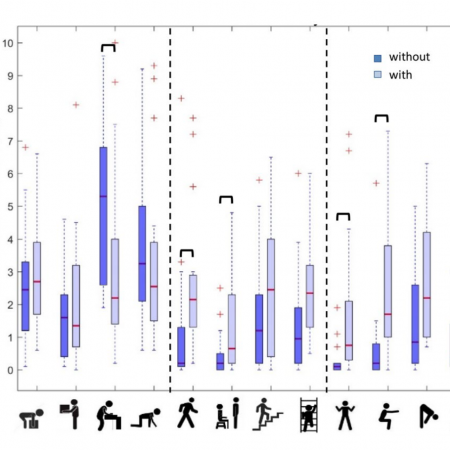
Babič, Jan; Petrič, Tadej; Mombaur, Katja; Kingma, Idsart; Bornmann, Jonas; Gonzalez-Vargas, Jose; Baltrusch, Saskia; Šarabon, Nejc; Houdijk, Han
SPEXOR: Design and development of passive spinal exoskeletal robot for low back pain prevention and vocational reintegration Journal Article
In: SN Applied Sciences, vol. 1, no. 3, pp. 262, 2019, ISSN: 2523-3963.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Robot Design | Links:
@article{Babic2019,
title = {SPEXOR: Design and development of passive spinal exoskeletal robot for low back pain prevention and vocational reintegration},
author = {Jan Babi\v{c} and Tadej Petri\v{c} and Katja Mombaur and Idsart Kingma and Jonas Bornmann and Jose Gonzalez-Vargas and Saskia Baltrusch and Nejc \v{S}arabon and Han Houdijk},
url = {http://link.springer.com/10.1007/s42452-019-0266-1},
doi = {10.1007/s42452-019-0266-1},
issn = {2523-3963},
year = {2019},
date = {2019-03-01},
urldate = {2019-03-01},
journal = {SN Applied Sciences},
volume = {1},
number = {3},
pages = {262},
abstract = {The objective of SPEXOR project is to address low back pain as one of the most appealing health problems of the modern society by creating a body of scientific and technological knowledge in the multidisciplinary areas of biomechanics, robotics, and computer science that will lead to technologies for low back pain prevention. In this paper we provide an overview of the current state-of-art of SPEXOR that the consortium achieved in the first twenty-four months of the project. After introducing the rationale, we describe the biomechanics of low back pain intervention, development of the musculoskeletal stress monitoring for assessment of neuromuscular trunk functions, modeling and optimization of the interaction of spinal exoskeleton with the human body, electromechanical design and development of the passive spinal exoskeleton and its control, and finally the end-user evaluation of the functional effects, usability and satisfaction.},
keywords = {Exoskeleton Design and Control, Robot Design},
pubstate = {published},
tppubtype = {article}
}
The objective of SPEXOR project is to address low back pain as one of the most appealing health problems of the modern society by creating a body of scientific and technological knowledge in the multidisciplinary areas of biomechanics, robotics, and computer science that will lead to technologies for low back pain prevention. In this paper we provide an overview of the current state-of-art of SPEXOR that the consortium achieved in the first twenty-four months of the project. After introducing the rationale, we describe the biomechanics of low back pain intervention, development of the musculoskeletal stress monitoring for assessment of neuromuscular trunk functions, modeling and optimization of the interaction of spinal exoskeleton with the human body, electromechanical design and development of the passive spinal exoskeleton and its control, and finally the end-user evaluation of the functional effects, usability and satisfaction.
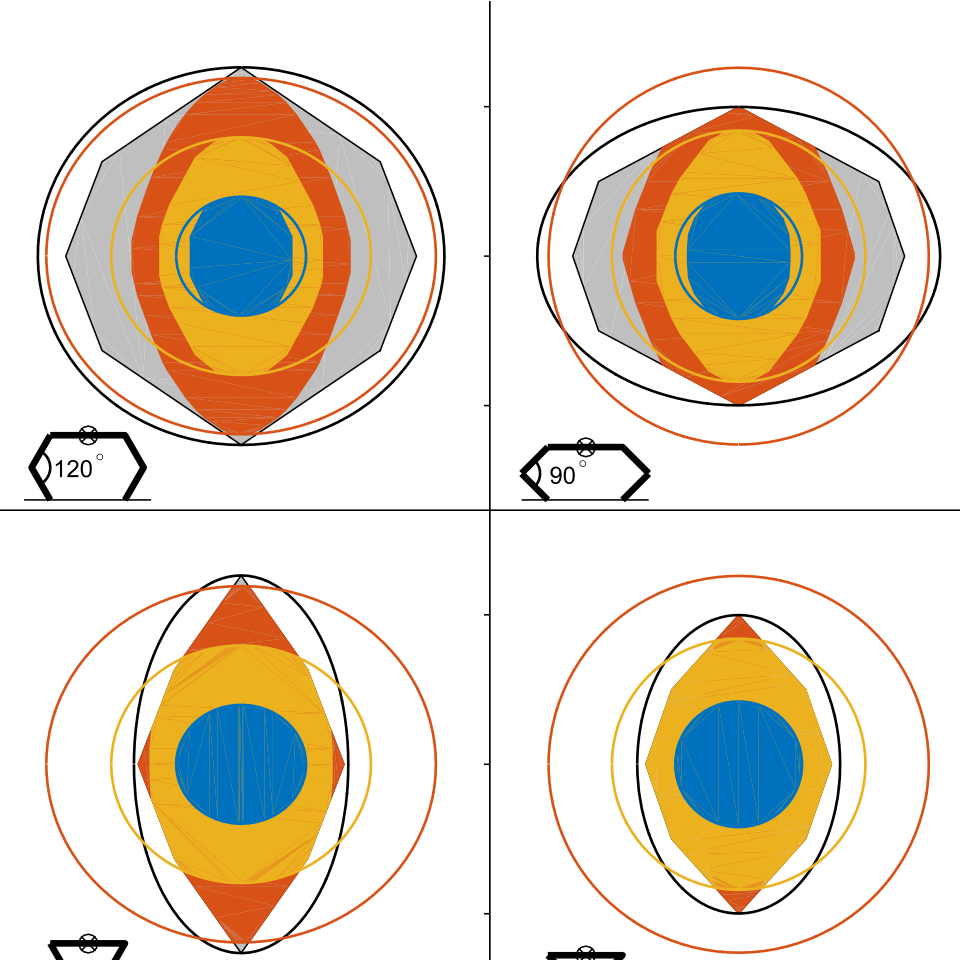
Azad, Morteza; Babič, Jan; Mistry, Michael
Effects of the weighting matrix on dynamic manipulability of robots Journal Article
In: Autonomous Robots, vol. 43, no. 7, pp. 1867–1879, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Postural Balance | Links:
@article{Azad2019,
title = {Effects of the weighting matrix on dynamic manipulability of robots},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {http://link.springer.com/10.1007/s10514-018-09819-y},
doi = {10.1007/s10514-018-09819-y},
year = {2019},
date = {2019-02-01},
journal = {Autonomous Robots},
volume = {43},
number = {7},
pages = {1867--1879},
abstract = {Dynamic manipulability of robots is a well-known tool to analyze, measure and predict a robot's performance in executing different tasks. This tool provides a graphical representation and a set of metrics as outcomes of a mapping from joint torques to the acceleration space of any point of interest of a robot such as the end-effector or the center of mass. In this paper, we show that the weighting matrix, which is included in the aforementioned mapping, plays a crucial role in the results of the dynamic manipulability analysis. Therefore, finding proper values for this matrix is the key to achieve reliable results. This paper studies the importance of the weighting matrix for dynamic manipulability of robots, which is overlooked in the literature, and suggests two physically meaningful choices for that matrix. We also explain three different metrics, which can be extracted from the graphical representations (i.e. ellipsoids) of the dynamic manipulability analysis. The application of these metrics in measuring a robot's physical ability to accelerate its end-effector in various desired directions is discussed via two illustrative examples.},
keywords = {Human Motor Control, Optimal Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Dynamic manipulability of robots is a well-known tool to analyze, measure and predict a robot's performance in executing different tasks. This tool provides a graphical representation and a set of metrics as outcomes of a mapping from joint torques to the acceleration space of any point of interest of a robot such as the end-effector or the center of mass. In this paper, we show that the weighting matrix, which is included in the aforementioned mapping, plays a crucial role in the results of the dynamic manipulability analysis. Therefore, finding proper values for this matrix is the key to achieve reliable results. This paper studies the importance of the weighting matrix for dynamic manipulability of robots, which is overlooked in the literature, and suggests two physically meaningful choices for that matrix. We also explain three different metrics, which can be extracted from the graphical representations (i.e. ellipsoids) of the dynamic manipulability analysis. The application of these metrics in measuring a robot's physical ability to accelerate its end-effector in various desired directions is discussed via two illustrative examples.
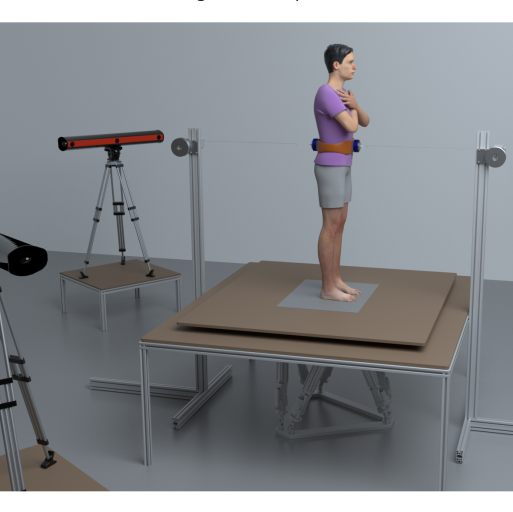
Kunavar, Tjaša; Čamernik, Jernej; Babič, Jan; Oztop, Erhan; Kawato, Mitsuo
Does danger of injury influence human motor adaptation? Proceedings Article
In: Workshop on Mechanism of Brain and Mind 2019, Rusutsu, Japan, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Sensorimotor Learning
@inproceedings{Kunavar2019a,
title = { Does danger of injury influence human motor adaptation?},
author = {Tja\v{s}a Kunavar and Jernej \v{C}amernik and Jan Babi\v{c} and Erhan Oztop and Mitsuo Kawato},
year = {2019},
date = {2019-01-06},
booktitle = {Workshop on Mechanism of Brain and Mind 2019},
address = {Rusutsu, Japan},
abstract = {Experimental paradigm for observing sensorimotor control was used to study human whole body motion. It made a step forward from arm-reaching studies to studying movements of the whole human body. Twenty male participants performed a series of squat to stand motions. Following a baseline block, backward perturbation to the centre of mass (COM) was applied by a pulling mechanism. Participants' aim was to successfully stand up. To assess adaptation of motion, the effect of perturbation was quantified using the trajectory area at every trial. Participants managed to gradually adapt to perturbation and significantly decrease the occurrence of failed trials by increasing their trajectory area. Preliminary results show that safety is an important part of motor adaptation process.},
keywords = {Human Motor Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Experimental paradigm for observing sensorimotor control was used to study human whole body motion. It made a step forward from arm-reaching studies to studying movements of the whole human body. Twenty male participants performed a series of squat to stand motions. Following a baseline block, backward perturbation to the centre of mass (COM) was applied by a pulling mechanism. Participants' aim was to successfully stand up. To assess adaptation of motion, the effect of perturbation was quantified using the trajectory area at every trial. Participants managed to gradually adapt to perturbation and significantly decrease the occurrence of failed trials by increasing their trajectory area. Preliminary results show that safety is an important part of motor adaptation process.

White, Olivier; Babič, Jan; Trenado, Carlos; Johannsen, Leif; Goswami, Nandu
The Promise of Stochastic Resonance in Falls Prevention Journal Article
In: Frontiers in Physiology, vol. 9, no. January, pp. 1–12, 2019, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning | Links:
@article{White2019,
title = {The Promise of Stochastic Resonance in Falls Prevention},
author = {Olivier White and Jan Babi\v{c} and Carlos Trenado and Leif Johannsen and Nandu Goswami},
url = {https://www.frontiersin.org/article/10.3389/fphys.2018.01865/full},
doi = {10.3389/fphys.2018.01865},
issn = {1664-042X},
year = {2019},
date = {2019-01-01},
journal = {Frontiers in Physiology},
volume = {9},
number = {January},
pages = {1--12},
abstract = {Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Multisensory integration is essential for maintenance of motor and cognitive abilities, thereby ensuring normal function and personal autonomy. Balance control is challenged during senescence or in motor disorders, leading to potential falls. Increased uncertainty in sensory signals is caused by a number of factors including noise, defined as a random and persistent disturbance that reduces the clarity of information. Counter-intuitively, noise can be beneficial in some conditions. Stochastic resonance is a mechanism whereby a particular level of noise actually enhances the response of non-linear systems to weak sensory signals. Here we review the effects of stochastic resonance on sensory modalities and systems directly involved in balance control. We highlight its potential for improving sensorimotor performance as well as cognitive and autonomic functions. These promising results demonstrate that stochastic resonance represents a flexible and non-invasive technique that can be applied to different modalities simultaneously. Finally we point out its benefits for a variety of scenarios including in ambulant elderly, skilled movements, sports and to patients with sensorimotor or autonomic dysfunctions.

Gorjan, Daša; Babič, Jan; Šarabon, Nejc; Potocanac, Zrinka
Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults Journal Article
In: Journal of Biomechanics, vol. 91, pp. 1–6, 2019, ISSN: 18732380.
Abstract | BibTeX | Tags: Kinematics, Muscle Mechanics, Postural Balance | Links:
@article{Gorjan2019,
title = {Small, movement dependent perturbations substantially alter postural control strategy in healthy young adults},
author = {Da\v{s}a Gorjan and Jan Babi\v{c} and Nejc \v{S}arabon and Zrinka Potocanac},
url = {http://www.sciencedirect.com/science/article/pii/S0021929018307292},
doi = {10.1016/j.jbiomech.2018.09.008},
issn = {18732380},
year = {2019},
date = {2019-01-01},
journal = {Journal of Biomechanics},
volume = {91},
pages = {1--6},
abstract = {Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p \< .001, RMS p ≤ .001, MPF p \< .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p \< .001), SD (p \< .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.},
keywords = {Kinematics, Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Postural control is commonly investigated by observing responses to perturbations. We developed a perturbation paradigm mimicking self-generated errors in weight shifting, which are a common cause of falling among older adults. Our aim was to determine the effects of this small, but complex, perturbation on postural sway of healthy young adults and evaluate the role of vision and cognition during movement dependent perturbations. Fifteen participants stood hip-width apart with their eyes open, closed and while performing two different cognitive tasks. Participants were continuously perturbed by medial-lateral (ML) support surface translations corresponding to, and hence doubling, their own center of mass sway. We analyzed the standard deviation (SD), root mean square (RMS), range, and mean power frequency (MPF) of center of pressure displacements. ML postural sway increased due to the perturbation (SD p ≤ .001, range p < .001, RMS p ≤ .001, MPF p < .001). Cognitive load increased the ML sway range (p = .048). Lack of vision increased ML MPF (p = .001) and anterior-posterior (AP) range (p < .001), SD (p < .001), and RMS (p = .001). Significant interaction of vision with the perturbation was found for the ML range (p = .045) and AP SD (p = .018). The perturbation specifically affected ML postural sway. Increased MPF is indicative of a postural control strategy change, which was insufficient for fully controlling the increased sway. Despite being small, this type of perturbation appears to be challenging for young adults.
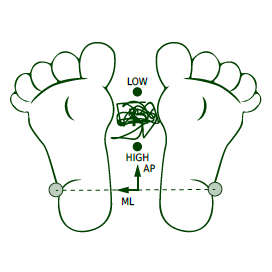
Čamernik, Jernej; Kezić, Sanja; Babič, Jan
Threat-related changes in postural control in virtual environments Proceedings Article
In: 2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book, pp. 393, Edinburgh, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Postural Balance
@inproceedings{\v{C}amernik2019a,
title = {Threat-related changes in postural control in virtual environments},
author = {Jernej \v{C}amernik and Sanja Kezi\'{c} and Jan Babi\v{c}},
year = {2019},
date = {2019-01-01},
booktitle = {2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book},
pages = {393},
address = {Edinburgh},
abstract = {Immersive virtual reality (VR) can be used as a tool to treat various medical conditions including psychiatric and motor control disorders. Since it enables a highly modifiable environment and difficulty, it has a large potential to be used as a research platform to study balance control. Otherwise hard to achieve extreme and dangerous experiences like standing on a very high ledge, can be easily achieved with the immersive VR within the research lab. Furthermore, it has been shown that the level of immersion in VR is highly determined by the capability of the system to deliver an inclusive, extensive, surrounding, vivid and matching illusion of reality to the senses of a participant. Therefore, we prepared an immersive VR environment, coupled with a robotic device to further enhance the level of immersion. With this setup we aimed to evaluate the threat related changes in postural control when using immersive VR with additional bodily gravity cues.},
keywords = {Human Motor Control, Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Immersive virtual reality (VR) can be used as a tool to treat various medical conditions including psychiatric and motor control disorders. Since it enables a highly modifiable environment and difficulty, it has a large potential to be used as a research platform to study balance control. Otherwise hard to achieve extreme and dangerous experiences like standing on a very high ledge, can be easily achieved with the immersive VR within the research lab. Furthermore, it has been shown that the level of immersion in VR is highly determined by the capability of the system to deliver an inclusive, extensive, surrounding, vivid and matching illusion of reality to the senses of a participant. Therefore, we prepared an immersive VR environment, coupled with a robotic device to further enhance the level of immersion. With this setup we aimed to evaluate the threat related changes in postural control when using immersive VR with additional bodily gravity cues.
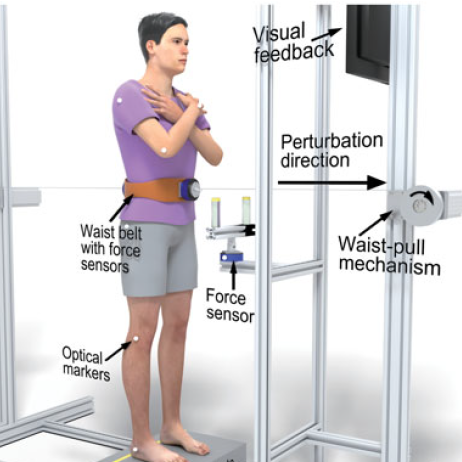
Čamernik, Jernej; Azad, Morteza; Peternel, Luka; Potočanac, Zrinka; Babič, Jan
Staying on your feet: the effectiveness of posture and handles in counteracting balance perturbation Journal Article
In: Ergonomics, vol. 62, no. 5, pp. 657–667, 2019, ISSN: 0014-0139.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Postural Balance | Links:
@article{\v{C}amernik2019b,
title = {Staying on your feet: the effectiveness of posture and handles in counteracting balance perturbation},
author = {Jernej \v{C}amernik and Morteza Azad and Luka Peternel and Zrinka Poto\v{c}anac and Jan Babi\v{c}},
url = {https://doi.org/10.1080/00140139.2018.1559363 https://www.tandfonline.com/doi/full/10.1080/00140139.2018.1559363},
doi = {10.1080/00140139.2018.1559363},
issn = {0014-0139},
year = {2019},
date = {2019-01-01},
journal = {Ergonomics},
volume = {62},
number = {5},
pages = {657--667},
publisher = {Taylor \& Francis},
abstract = {Stairways, public transport and inclined walkways are often considered as sites with higher likelihood of falls due to a sudden loss of balance. Such sites are usually marked with warning signs, equipped with non-slip surfaces and handles or handrails to avert or decrease this likelihood. Especially, handles are supposed to provide additional support in cases of a sudden loss of balance. However, the mechanisms of using handles for balance at different heights are not yet fully disclosed. We simulated full body perturbations by applying an anterior force to the waist and investigated effectiveness and mechanisms of balance recovery in five different postures: step stance and normal stance with or without holding handles at different heights. Results indicate that both step stance and holding handles at different vertical positions sufficiently assist balance recovery, compared to normal stance. While there was no significant effect of handle in CoM displacement, the shoulder height handle required the lowest handle force, indicating a difference in using the handle. Practitioner summary: To investigate handle use for balance recovery, we perturbed healthy young adults in different standing positions. Even though the use of different handles had a similar effect, the lowest forces were exerted on the shoulder height handle indicating a preferred handle position for balance recovery. Abbreviation: AP: antero-posterior; CNS: Central nervous system; CoM: Center of Mass; CoMmax: Maximal displacement of the center of mass; CoP: Center of pressure; FHmax: Maximal resultant force exerted on the handle; hFHmax: Maximal horizontal force exerted on the handle; vFHmax; Maximal vertical force exerted on the handle; M1-M8: Perturbation force magnitude.},
keywords = {Human Motor Control, Kinematics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Stairways, public transport and inclined walkways are often considered as sites with higher likelihood of falls due to a sudden loss of balance. Such sites are usually marked with warning signs, equipped with non-slip surfaces and handles or handrails to avert or decrease this likelihood. Especially, handles are supposed to provide additional support in cases of a sudden loss of balance. However, the mechanisms of using handles for balance at different heights are not yet fully disclosed. We simulated full body perturbations by applying an anterior force to the waist and investigated effectiveness and mechanisms of balance recovery in five different postures: step stance and normal stance with or without holding handles at different heights. Results indicate that both step stance and holding handles at different vertical positions sufficiently assist balance recovery, compared to normal stance. While there was no significant effect of handle in CoM displacement, the shoulder height handle required the lowest handle force, indicating a difference in using the handle. Practitioner summary: To investigate handle use for balance recovery, we perturbed healthy young adults in different standing positions. Even though the use of different handles had a similar effect, the lowest forces were exerted on the shoulder height handle indicating a preferred handle position for balance recovery. Abbreviation: AP: antero-posterior; CNS: Central nervous system; CoM: Center of Mass; CoMmax: Maximal displacement of the center of mass; CoP: Center of pressure; FHmax: Maximal resultant force exerted on the handle; hFHmax: Maximal horizontal force exerted on the handle; vFHmax; Maximal vertical force exerted on the handle; M1-M8: Perturbation force magnitude.
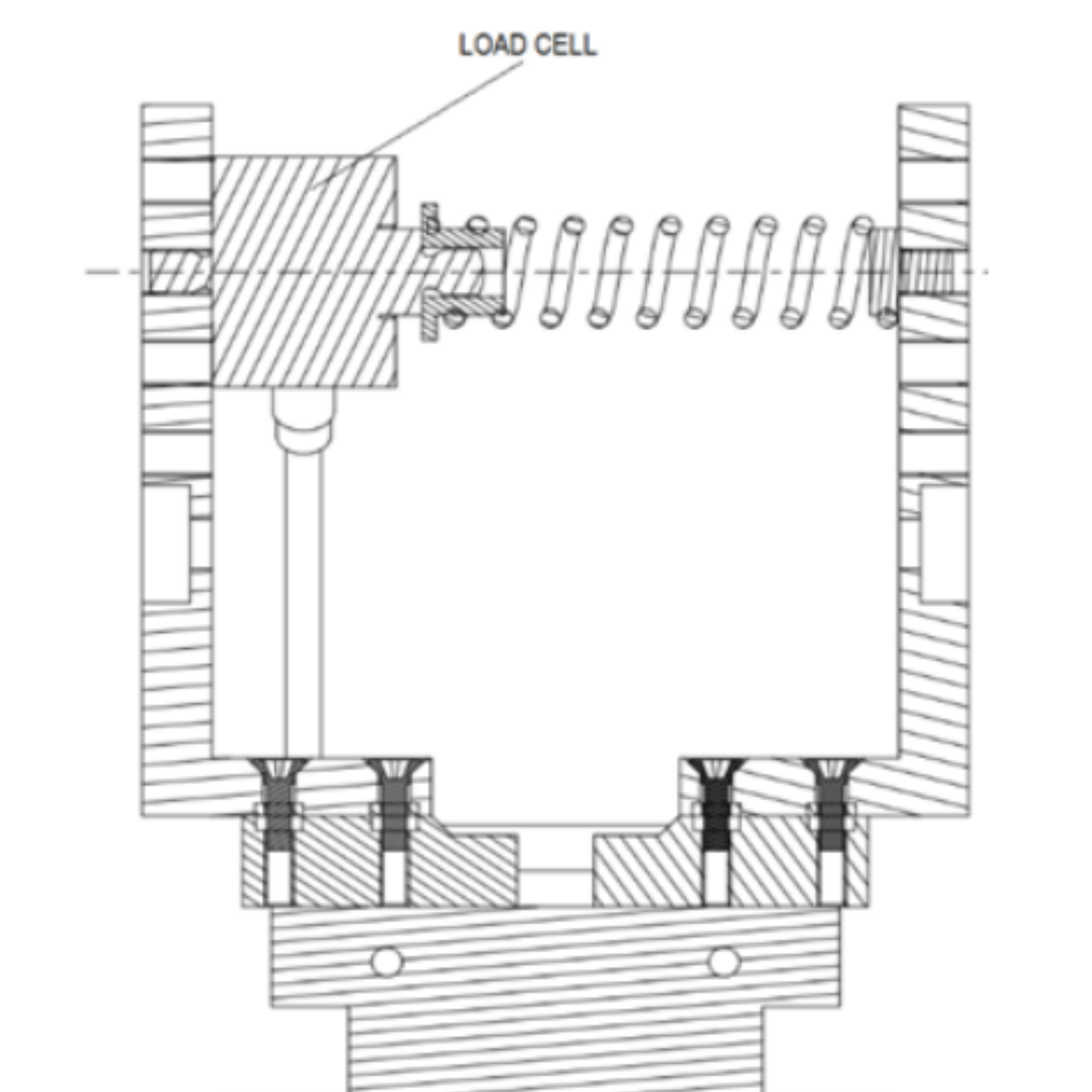
Romeo, Rocco A; Fiorio, Luca; Avila-Mireles, Edwin Johnatan; Cannella, Ferdinando; Metta, Giorgio; Pucci, Daniele
Closed-loop Force Control of a Pneumatic Gripper Actuated by Two Pressure Regulators Journal Article
In: IEEE International Conference on Intelligent Robots and Systems, pp. 7157-7162, 2019, ISSN: 21530866.
Abstract | BibTeX | Tags: Force Control | Links:
@article{Romeo2019,
title = {Closed-loop Force Control of a Pneumatic Gripper Actuated by Two Pressure Regulators},
author = {Rocco A Romeo and Luca Fiorio and Edwin Johnatan Avila-Mireles and Ferdinando Cannella and Giorgio Metta and Daniele Pucci},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=8968226},
doi = {10.1109/IROS40897.2019.8968226},
issn = {21530866},
year = {2019},
date = {2019-01-01},
journal = {IEEE International Conference on Intelligent Robots and Systems},
pages = {7157-7162},
abstract = {Robotic arms can perform grasping actions thanks to their 'dexteorus' part, i.e. the gripper. Among the various categories, nowadays pneumatic grippers became the most employed in industry, as they have low cost and little bulkiness. Despite their simplicity, controlling the force applied by these grippers is not straightforward due to the dependence of such a force on the air pressure in the gripper chambers. As a result, it is still tricky to implement closed-loop force control for pneumatic grippers. This paper intends to deliver a control scheme relying on the force measurement to control pneumatic grippers. The force might be measured through a commercial sensor (e.g. a load cell) and fed back to close the control loop. This includes a calibration which maps the force-pressure relation taking into account both desired force and length of the gripper fingers. The control scheme exploits two different pressure regulators to precisely adjust the air pressure inside the gripper chambers (i.e. opening and closing chambers). To this aim, a quadratic programming algorithm is employed. The control scheme performance revealed to be good: results will be shown in terms of gripper response to sinusoidal and step inputs, along with the pressure-force characterization.},
keywords = {Force Control},
pubstate = {published},
tppubtype = {article}
}
Robotic arms can perform grasping actions thanks to their 'dexteorus' part, i.e. the gripper. Among the various categories, nowadays pneumatic grippers became the most employed in industry, as they have low cost and little bulkiness. Despite their simplicity, controlling the force applied by these grippers is not straightforward due to the dependence of such a force on the air pressure in the gripper chambers. As a result, it is still tricky to implement closed-loop force control for pneumatic grippers. This paper intends to deliver a control scheme relying on the force measurement to control pneumatic grippers. The force might be measured through a commercial sensor (e.g. a load cell) and fed back to close the control loop. This includes a calibration which maps the force-pressure relation taking into account both desired force and length of the gripper fingers. The control scheme exploits two different pressure regulators to precisely adjust the air pressure inside the gripper chambers (i.e. opening and closing chambers). To this aim, a quadratic programming algorithm is employed. The control scheme performance revealed to be good: results will be shown in terms of gripper response to sinusoidal and step inputs, along with the pressure-force characterization.
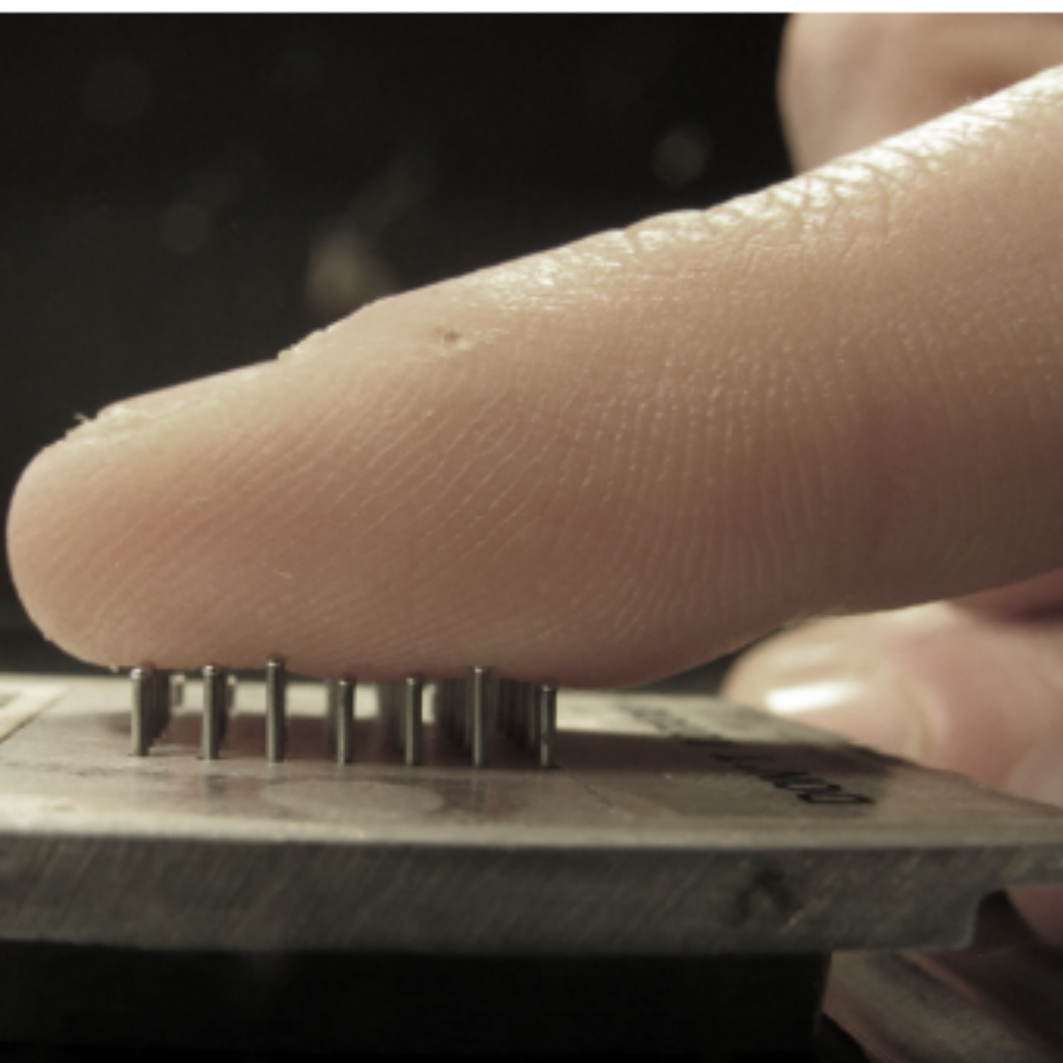
Avila-Mireles, Edwin Johnatan; Abidi, Haider; D'Imperio, Mariapaola; Scaccia, Massimiliano; Liberini, Paolo; Caldwell, Darwin G.; Cannella, Ferdinando
Study of Patients Self-Training Influence on Peripheral Neuropathies Diseases Diagnosis through D.I.T.A Device Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, pp. 5435-5438, 2019, ISSN: 1557170X.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Avila-Mireles2019,
title = {Study of Patients Self-Training Influence on Peripheral Neuropathies Diseases Diagnosis through D.I.T.A Device},
author = {Edwin Johnatan Avila-Mireles and Haider Abidi and Mariapaola D'Imperio and Massimiliano Scaccia and Paolo Liberini and Darwin G. Caldwell and Ferdinando Cannella},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=8856599},
doi = {10.1109/EMBC.2019.8856599},
issn = {1557170X},
year = {2019},
date = {2019-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
pages = {5435-5438},
publisher = {IEEE},
abstract = {In our daily life, the sight and the sense of touch play a fundamental role in objects recognitions. This process is helped by the experience: if a subject has already seen or already touched an object in the past, he will recognize it more easily in the future. Following this assumption, the authors of this paper wanted to investigate if the experience can influence the results of a clinical examination where the subject has an active role. The attention was focused on the peripheral neuropathies diagnosis since they require an accurate assessment of several parameters including the tactile sensitivity trend. In other words, if the tests encompass an active role of the subjects, one of the main uncertainties is the self-training that influences the subject responses. This work focuses on the study of this self-training using the D.I.T.A device (Dynamic Investigation Test-rig on hAptics). Results clearly show a fundamental role of priming during 'haptic modality': expert subjects, previously experienced with the tests, demonstrated better recognition of the encountered stimuli, compared to novices. Moreover, the results show that the maximum difference between the two groups of subjects is in the first part of the test. An ANOVA analysis was carried out to demonstrate that also the errors between the pins-arrays are affected by the priming.},
keywords = {Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In our daily life, the sight and the sense of touch play a fundamental role in objects recognitions. This process is helped by the experience: if a subject has already seen or already touched an object in the past, he will recognize it more easily in the future. Following this assumption, the authors of this paper wanted to investigate if the experience can influence the results of a clinical examination where the subject has an active role. The attention was focused on the peripheral neuropathies diagnosis since they require an accurate assessment of several parameters including the tactile sensitivity trend. In other words, if the tests encompass an active role of the subjects, one of the main uncertainties is the self-training that influences the subject responses. This work focuses on the study of this self-training using the D.I.T.A device (Dynamic Investigation Test-rig on hAptics). Results clearly show a fundamental role of priming during 'haptic modality': expert subjects, previously experienced with the tests, demonstrated better recognition of the encountered stimuli, compared to novices. Moreover, the results show that the maximum difference between the two groups of subjects is in the first part of the test. An ANOVA analysis was carried out to demonstrate that also the errors between the pins-arrays are affected by the priming.

Šarabon, Nejc; Kozinc, Žiga; Babič, Jan; Marković, Goran
Effect of rowing ergometer compliance on biomechanical and physiological indicators during simulated 2,000-metre race Journal Article
In: Journal of Sports Science and Medicine, vol. 18, pp. 264–270, 2019.
Abstract | BibTeX | Tags: Ergonomy, Neuromusculoskeletal Modelling, Sport
@article{Sarabon2019,
title = {Effect of rowing ergometer compliance on biomechanical and physiological indicators during simulated 2,000-metre race},
author = {Nejc \v{S}arabon and \v{Z}iga Kozinc and Jan Babi\v{c} and Goran Markovi\'{c}},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
journal = {Journal of Sports Science and Medicine},
volume = {18},
pages = {264--270},
abstract = {This study compared biomechanical characteristics and physiological responses during rowing on three devices: (i) stable ergometer (STE), (ii) transversally compliant ergometer (TCE) and (iii) frontally compliant ergometer (FCE). Eleven young competitive rowers completed a 2000 meter simulated race under each of the ergometer conditions in a randomized order. Stroke rate, average force, power output, velocity and amplitude of the handle and stretcher or seat, heart rate and blood lactate were measured at 500 m intervals. Force and power at the stretcher were significantly lower (p \< 0.03) for TCE, while stroke rate and velocities of the handle and the seat were higher (p \< 0.01). No significant differences were observed between STE and FCE in biomechanical parameters. The lowest rowing performance was observed in FCE (p = 0.007), and was accompanied with the highest average heart rate (p = 0.031). Our findings indicate that in TCE, rowers modified their technique, but were able to maintain physiological strain and performance. In contrast, FCE had no effect on rowing biomechanics, but decreased rowing performance and increased physiological strain. It seems plausible that transversal, but not frontal compliance, elicited a biomechanical technique that might reduce the discrepancy between a rowing ergometer and on-water rowing.},
keywords = {Ergonomy, Neuromusculoskeletal Modelling, Sport},
pubstate = {published},
tppubtype = {article}
}
This study compared biomechanical characteristics and physiological responses during rowing on three devices: (i) stable ergometer (STE), (ii) transversally compliant ergometer (TCE) and (iii) frontally compliant ergometer (FCE). Eleven young competitive rowers completed a 2000 meter simulated race under each of the ergometer conditions in a randomized order. Stroke rate, average force, power output, velocity and amplitude of the handle and stretcher or seat, heart rate and blood lactate were measured at 500 m intervals. Force and power at the stretcher were significantly lower (p < 0.03) for TCE, while stroke rate and velocities of the handle and the seat were higher (p < 0.01). No significant differences were observed between STE and FCE in biomechanical parameters. The lowest rowing performance was observed in FCE (p = 0.007), and was accompanied with the highest average heart rate (p = 0.031). Our findings indicate that in TCE, rowers modified their technique, but were able to maintain physiological strain and performance. In contrast, FCE had no effect on rowing biomechanics, but decreased rowing performance and increased physiological strain. It seems plausible that transversal, but not frontal compliance, elicited a biomechanical technique that might reduce the discrepancy between a rowing ergometer and on-water rowing.
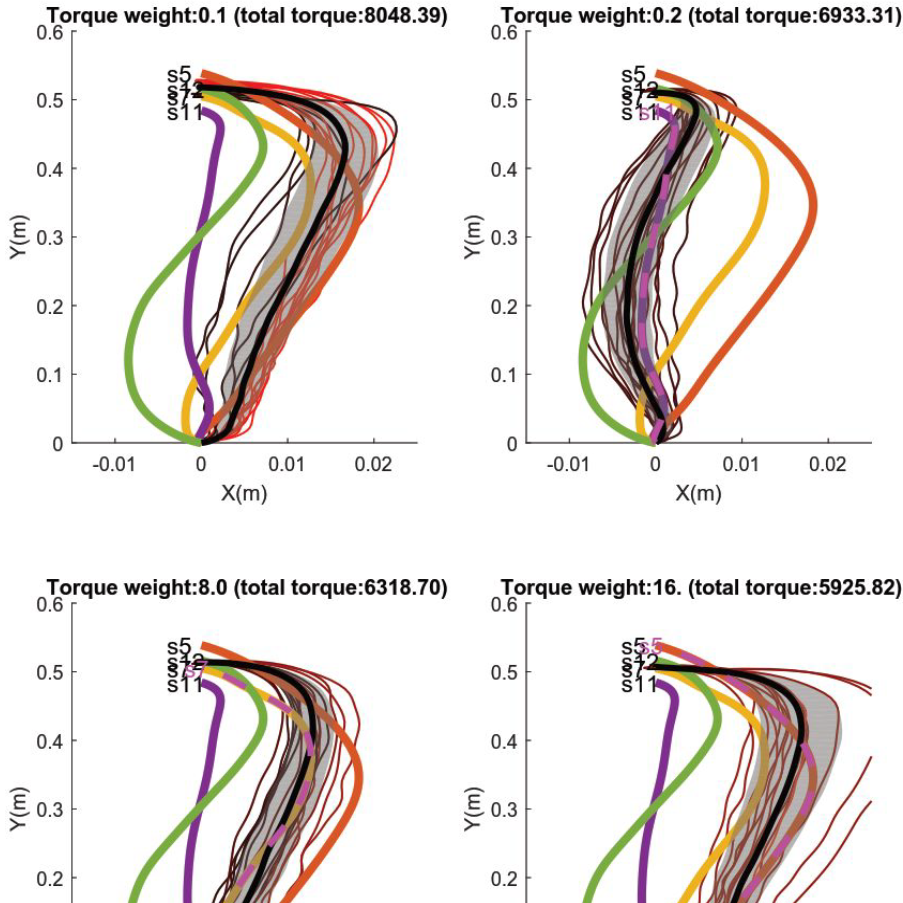
Arditi, Emir; Čamernik, Jernej; Babič, Jan; Ugur, Emre; Nagai, Yukie; Oztop, Erhan
Explorations on inverse reinforcement learning for the analysis of sensorimotor data Proceedings Article
In: Winter Workshop on Mechanism of Brain and Mind 2019, Rusutsu, 9.-11.1. 2019, Rusutsu, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Machine Learning, Sensorimotor Learning
@inproceedings{Arditi2019,
title = {Explorations on inverse reinforcement learning for the analysis of sensorimotor data},
author = {Emir Arditi and Jernej \v{C}amernik and Jan Babi\v{c} and Emre Ugur and Yukie Nagai and Erhan Oztop},
year = {2019},
date = {2019-01-01},
booktitle = {Winter Workshop on Mechanism of Brain and Mind 2019, Rusutsu, 9.-11.1. 2019},
address = {Rusutsu},
abstract = {We set out to explore whether recent Reinforcement Learning methods can serve as a computational tool for investigating optimality principles of motor control and cognitive decision making mechanisms of the brain. For this purpose, we have targeted two different tasks. One includes full body motion which involves possibility of injury and fall; whereas the other involves playing a simple computer game requiring prediction and fast decision making. If we can recover optimality principles employed by the brain for various control and decision making tasks, we can analyse experimental data with less bias, and hope to gain more insights than possible with classical methods.},
keywords = {Human Motor Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We set out to explore whether recent Reinforcement Learning methods can serve as a computational tool for investigating optimality principles of motor control and cognitive decision making mechanisms of the brain. For this purpose, we have targeted two different tasks. One includes full body motion which involves possibility of injury and fall; whereas the other involves playing a simple computer game requiring prediction and fast decision making. If we can recover optimality principles employed by the brain for various control and decision making tasks, we can analyse experimental data with less bias, and hope to gain more insights than possible with classical methods.

Gorjan, Daša; Bellicha, Angelina; Čamernik, Jernej; Bachta, Wael; Babič, Jan
Postural control during induced stabilization of the center of mass and light touch Proceedings Article
In: 2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book, pp. 572–573, Edinburgh, 2019.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance
@inproceedings{Gorjan2019b,
title = {Postural control during induced stabilization of the center of mass and light touch},
author = {Da\v{s}a Gorjan and Angelina Bellicha and Jernej \v{C}amernik and Wael Bachta and Jan Babi\v{c}},
year = {2019},
date = {2019-01-01},
booktitle = {2019 ISPRG World Congress, June 30 to July 4, Edinburgh, Scotland : abstract book},
pages = {572--573},
address = {Edinburgh},
abstract = {Conference poster},
keywords = {Human Motor Control, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Conference poster
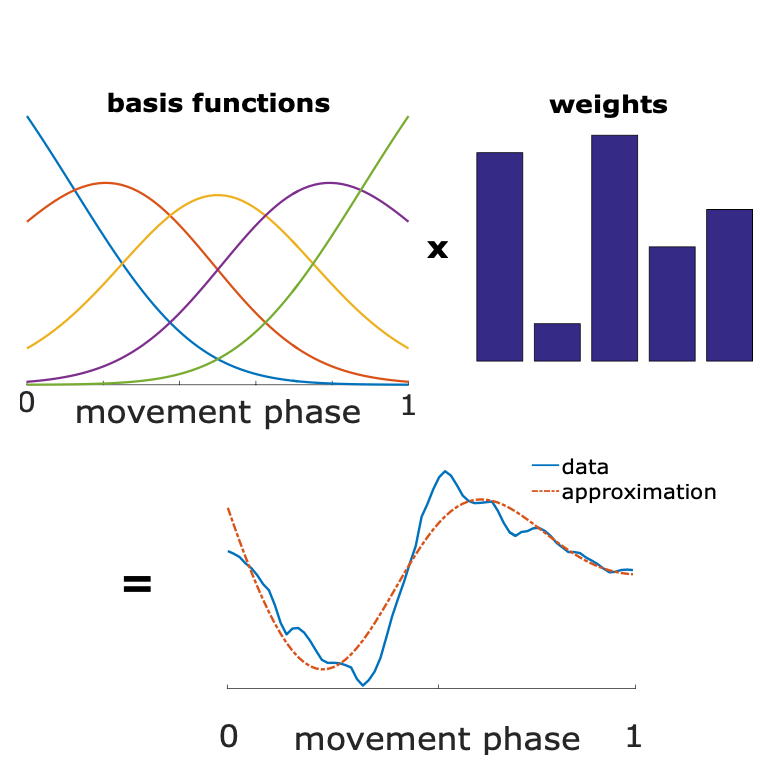
Bobek, Urban; Rueckert, Elmar; Jamšek, Marko; Barišić, Saša; Babič, Jan
Combining Foot Placement Prediction with Obstacle Detection to Detect Tripping Proceedings Article
In: Žemva, Andrej; Trost, Andrej (Ed.): Proceedings of the Twenty-eighth Electrotechnical and Computer Science Conference ERK 2019, pp. 110–113, Portorož, Slovenia, 2019, ISSN: 2591-0442.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling | Links:
@inproceedings{Bobek2019,
title = {Combining Foot Placement Prediction with Obstacle Detection to Detect Tripping},
author = {Urban Bobek and Elmar Rueckert and Marko Jam\v{s}ek and Sa\v{s}a Bari\v{s}i\'{c} and Jan Babi\v{c}},
editor = {Andrej \v{Z}emva and Andrej Trost},
url = {https://erk.fe.uni-lj.si/2019/program},
issn = {2591-0442},
year = {2019},
date = {2019-01-01},
booktitle = {Proceedings of the Twenty-eighth Electrotechnical and Computer Science Conference ERK 2019},
pages = {110--113},
address = {Portoro\v{z}, Slovenia},
abstract = {Tripping is a major cause of fall related injuries, especialy among the elderly population. Some research has been done on the mechanics of tripping and strategies to gain balance afterwards. But what if you could detect a potential trip in advance and possibly prevent it? We pro- pose a system that involves detecting obstacles in front of the user and a method to predict whether they will hit it.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
Tripping is a major cause of fall related injuries, especialy among the elderly population. Some research has been done on the mechanics of tripping and strategies to gain balance afterwards. But what if you could detect a potential trip in advance and possibly prevent it? We pro- pose a system that involves detecting obstacles in front of the user and a method to predict whether they will hit it.
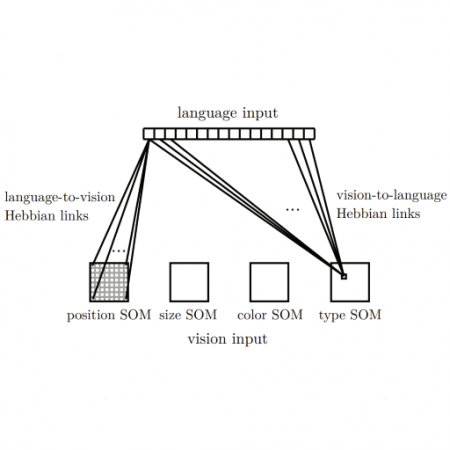
Fele, Benjamin; Takác, Martin
A connectionist model of acquisition of noun phrases with syntactic bootstrapping Proceedings Article
In: Kognícia a umelý život 2019, pp. 31-32, 2019, ISBN: 978-80-223-4720-4.
Abstract | BibTeX | Tags: AI | Links:
@inproceedings{fele2019connectionist,
title = {A connectionist model of acquisition of noun phrases with syntactic bootstrapping},
author = {Benjamin Fele and Martin Tak\'{a}c},
url = {http://cogsci.fmph.uniba.sk/kuz2019/files/zbornik/fele-takac.pdf},
isbn = {978-80-223-4720-4},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
booktitle = {Kogn\'{i}cia a umel\'{y} \v{z}ivot 2019},
pages = {31-32},
abstract = {We present a model of acquisition of noun phrases as descriptions of objects in a grounded setting. The model uses cross-situational learning to acquire mappings between words and sensory properties represented in self-organising maps. We also explore syntactic bootstrapping\textemdashusing the syntactic knowledge to help meaning acquisition and vice versa. The model can reliably reconstruct inputs and is applicable in real-world scenarios.},
keywords = {AI},
pubstate = {published},
tppubtype = {inproceedings}
}
We present a model of acquisition of noun phrases as descriptions of objects in a grounded setting. The model uses cross-situational learning to acquire mappings between words and sensory properties represented in self-organising maps. We also explore syntactic bootstrapping—using the syntactic knowledge to help meaning acquisition and vice versa. The model can reliably reconstruct inputs and is applicable in real-world scenarios.
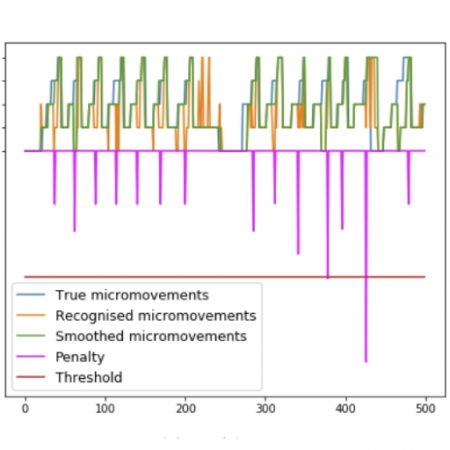
Luštrek, Mitja; Fele, Benjamin; Reščič, Nina; Janko, Vito
Counting bites with a smart watch Proceedings Article
In: Slovenian Conference on Artificial Intelligence: proceedings of the 22nd International Multiconference Information Society-IS, pp. 49–52, 2019.
Abstract | BibTeX | Tags: AI | Links:
@inproceedings{luvstrek2019counting,
title = {Counting bites with a smart watch},
author = {Mitja Lu\v{s}trek and Benjamin Fele and Nina Re\v{s}\v{c}i\v{c} and Vito Janko},
url = {http://ai.ijs.si/MitjaL/documents/Counting_bites_with_a_smart_watch-IS-19.pdf},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
booktitle = {Slovenian Conference on Artificial Intelligence: proceedings of the 22nd International Multiconference Information Society-IS},
pages = {49--52},
abstract = {The work described in this paper is a part of the WellCo project, which is developing a virtual coach for healthy lifestyle. An important aspect of a healthy lifestyle is nutrition, and knowing as much as possible about the users’ current nutrition can contribute to better coaching. We therefore set out to count the number of times the users take food to their mouths (bites) using smartwatch sensors. This enables identifying the meals as well as estimating the caloric intake and the speed of eating. We compare three approaches: two that rely on classical machine learning and hidden Markov models, and one that uses deep learning. The F-scores of the approaches range from 0.63 to 0.91, and the percentages of miscounted bites from 6.9 % to 10.7 %, with a different approach scoring best on each metric.},
keywords = {AI},
pubstate = {published},
tppubtype = {inproceedings}
}
The work described in this paper is a part of the WellCo project, which is developing a virtual coach for healthy lifestyle. An important aspect of a healthy lifestyle is nutrition, and knowing as much as possible about the users’ current nutrition can contribute to better coaching. We therefore set out to count the number of times the users take food to their mouths (bites) using smartwatch sensors. This enables identifying the meals as well as estimating the caloric intake and the speed of eating. We compare three approaches: two that rely on classical machine learning and hidden Markov models, and one that uses deep learning. The F-scores of the approaches range from 0.63 to 0.91, and the percentages of miscounted bites from 6.9 % to 10.7 %, with a different approach scoring best on each metric.
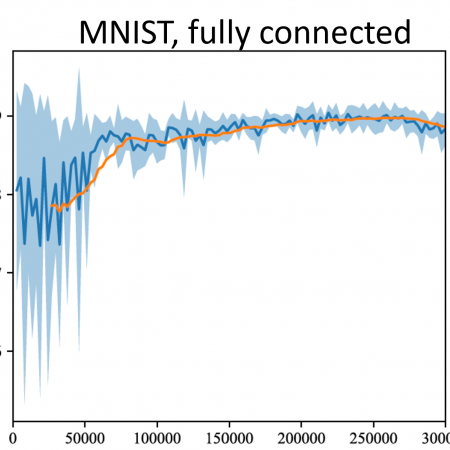
Fele, Benjamin
Dynamic Determination of Appropriate Training Instances Using Reinforcement Learning Proceedings Article
In: MEi: CogSci Conference 2019, pp. 23, 2019, ISBN: 978-80-223-4740-2.
@inproceedings{fele2019dynamic,
title = {Dynamic Determination of Appropriate Training Instances Using Reinforcement Learning},
author = {Benjamin Fele},
url = {https://www.meicogsci.eu/downloads/MEiCogSci_Conference_Proceedings_2019.pdf},
isbn = {978-80-223-4740-2},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
booktitle = {MEi: CogSci Conference 2019},
pages = {23},
keywords = {AI},
pubstate = {published},
tppubtype = {inproceedings}
}
2018
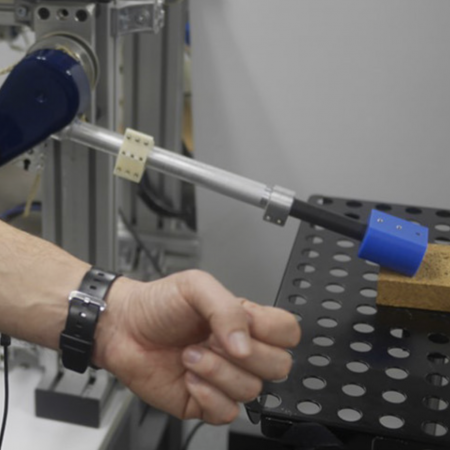
Teramae, Tatsuya; Ishihara, Koji; Babič, Jan; Morimoto, Jun; Oztop, Erhan
Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots Journal Article
In: Frontiers in Neurorobotics, vol. 12, pp. 71, 2018, ISSN: 1662-5218.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Teramae2018,
title = {Human-In-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots},
author = {Tatsuya Teramae and Koji Ishihara and Jan Babi\v{c} and Jun Morimoto and Erhan Oztop},
url = {https://www.frontiersin.org/article/10.3389/fnbot.2018.00071/full},
doi = {10.3389/fnbot.2018.00071},
issn = {1662-5218},
year = {2018},
date = {2018-11-01},
journal = {Frontiers in Neurorobotics},
volume = {12},
pages = {71},
publisher = {Frontiers},
abstract = {Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Pneumatically actuated muscles provide a low cost, lightweight and high power-to-weight ratio solution for many robotic applications. In addition, the antagonist pair configuration for robotic arms make it open to biologically inspired control approaches. In spite of these advantages, they have not been widely adopted in human-in-the-loop control and learning applications. In this study, we propose a biologically inspired multimodal human-in-the-loop control system for driving a one degree-of-freedom robot, and realize the task of hammering a nail into a wood block under human control. We analyze the human sensorimotor learning in this system through a set of experiments, and show that effective autonomous hammering skill can be readily obtained through the developed human-robot interface. The results indicate that a human-in-the-loop learning setup with anthropomorphically valid multi-modal human-robot interface leads to fast learning, thus can be used to effectively derive autonomous robot skills for ballistic motor tasks that require continuous modulation of impedance.
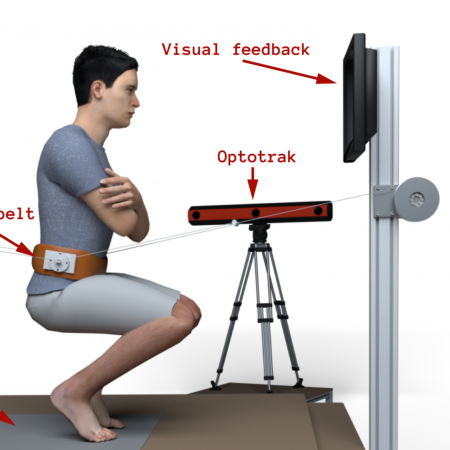
Čamernik, Jernej; Oztop, Erhan; Babič, Jan
Understanding Human Adaptation in Squat-to-Stand movements Proceedings Article
In: 2018 Türkiye Robotbilim Konferansi, TORK 2018, pp. 245–247, Istanbul, 2018.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning
@inproceedings{Camernik2018,
title = {Understanding Human Adaptation in Squat-to-Stand movements},
author = {Jernej \v{C}amernik and Erhan Oztop and Jan Babi\v{c}},
year = {2018},
date = {2018-01-01},
booktitle = {2018 T\"{u}rkiye Robotbilim Konferansi, TORK 2018},
pages = {245--247},
address = {Istanbul},
abstract = {We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We designed an experimental paradigm to repli- cate force field experiments in reaching studies by using whole-body motion and applying force controlled perturbations directly to the subject's center of mass. With this specific exper- imental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to the danger of falling and injury. Here we describe the developed methodology and present preliminary results from an ongoing study. It is expected that the obtained whole body control and adaptation principles will find application in humanoid robots and exoskeletons.
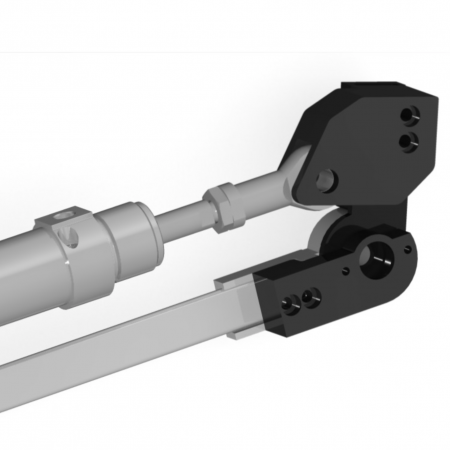
Jamšek, Marko; Babič, Jan
Design and preliminary testing of a pneumatic exoskeleton for walking assistance Proceedings Article
In: 27th International Electrotechnical and Computer Science Conference ERK 2018, pp. 159–162, 2018.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@inproceedings{Jamsek2018,
title = {Design and preliminary testing of a pneumatic exoskeleton for walking assistance},
author = {Marko Jam\v{s}ek and Jan Babi\v{c}},
url = {https://erk.fe.uni-lj.si/2018/program.php},
year = {2018},
date = {2018-01-01},
urldate = {2018-01-01},
booktitle = {27th International Electrotechnical and Computer Science Conference ERK 2018},
pages = {159--162},
abstract = {Tripping is one of the major causes of falls in elderly people. Injuries that originate from falls usually have se- vere consequences on their quality of life. The best so- lution for this problem is prevention of such traumatic events which proves to be a challenge in the current state of elderly care. This is why we are in an urgent need of developing new solutions that could help in the preven- tion of falls and fall related injuries in this ever increas- ing part of our entire population. One possible preven- tive solution could be the use of assistive devices such as exoskeletons. In this work we present a design of a pneumatic exoskeleton for walking assistance primarily designed as a platform to study active control solutions for preventing falls caused by tripping. We also present a preliminary evaluation of the exoskeleton capabilities on affecting the gait characteristics of a subject during walking.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {inproceedings}
}
Tripping is one of the major causes of falls in elderly people. Injuries that originate from falls usually have se- vere consequences on their quality of life. The best so- lution for this problem is prevention of such traumatic events which proves to be a challenge in the current state of elderly care. This is why we are in an urgent need of developing new solutions that could help in the preven- tion of falls and fall related injuries in this ever increas- ing part of our entire population. One possible preven- tive solution could be the use of assistive devices such as exoskeletons. In this work we present a design of a pneumatic exoskeleton for walking assistance primarily designed as a platform to study active control solutions for preventing falls caused by tripping. We also present a preliminary evaluation of the exoskeleton capabilities on affecting the gait characteristics of a subject during walking.
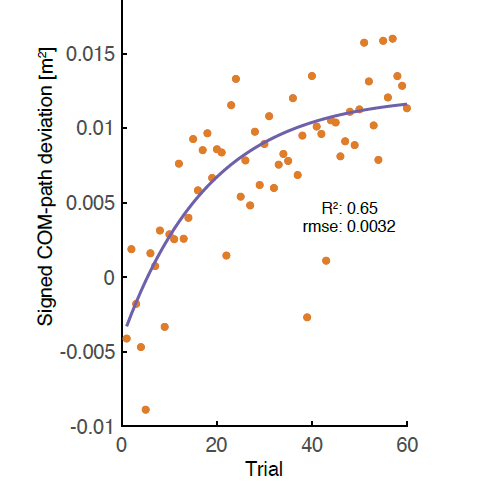
Čamernik, Jernej; Rueckert, Elmar; Oztop, Erhan; Babič, Jan
Configurable dynamical environment simulation platform for studies of whole- body motor control and learning Proceedings Article
In: Congress programme, 8th World Congress of Biomechanics, 8-12 July 2018, Dublin, Ireland, Dublin, 2018.
Abstract | BibTeX | Tags: Human Motor Control, Optimal Control, Sensorimotor Learning
@inproceedings{\v{C}amernik2018a,
title = {Configurable dynamical environment simulation platform for studies of whole- body motor control and learning},
author = {Jernej \v{C}amernik and Elmar Rueckert and Erhan Oztop and Jan Babi\v{c}},
year = {2018},
date = {2018-01-01},
booktitle = {Congress programme, 8th World Congress of Biomechanics, 8-12 July 2018, Dublin, Ireland},
address = {Dublin},
abstract = {We propose an experimental paradigm with which we aim to replicate force field experiments in reaching studies by using full body motion and applying force controlled perturbation directly to the subject’s centre-of-mass. With our specific experimental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to danger of falling and injury. The two main components of our setup include a custom made force-controlled pulling mechanism and a 6 degrees-of-freedom position controlled Stewart platform. Both devices can be used either individually or simultaneously for inducing full body perturbations and/or reducing the effects of perturbation. To test our setup, we conducted a pilot study where subjects had to perform a series of squat-to-stand movements. By methodologically applying perturbations directly to their centre-of-mass, we created an environment where danger and energy consumption is critical. Preliminary results show that our experimental setup can be used for directly studying full-body motor control and learning.},
keywords = {Human Motor Control, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose an experimental paradigm with which we aim to replicate force field experiments in reaching studies by using full body motion and applying force controlled perturbation directly to the subject’s centre-of-mass. With our specific experimental setup, we even make a step forward from conventional setups and expose the sensorimotor control mechanisms and adaptations to danger of falling and injury. The two main components of our setup include a custom made force-controlled pulling mechanism and a 6 degrees-of-freedom position controlled Stewart platform. Both devices can be used either individually or simultaneously for inducing full body perturbations and/or reducing the effects of perturbation. To test our setup, we conducted a pilot study where subjects had to perform a series of squat-to-stand movements. By methodologically applying perturbations directly to their centre-of-mass, we created an environment where danger and energy consumption is critical. Preliminary results show that our experimental setup can be used for directly studying full-body motor control and learning.

Romano, Francesco; Nava, Gabriele; Azad, Morteza; Camernik, Jernej; Dafarra, Stefano; Dermy, Oriane; Latella, Claudia; Lazzaroni, Maria; Lober, Ryan; Lorenzini, Marta; Pucci, Daniele; Sigaud, Olivier; Traversaro, Silvio; Babič, Jan; Ivaldi, Serena; Mistry, Michael; Padois, Vincent; Nori, Francesco
The CoDyCo Project Achievements and Beyond: Toward Human Aware Whole-Body Controllers for Physical Human Robot Interaction Journal Article
In: IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 516–523, 2018, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@article{Romano2018,
title = {The CoDyCo Project Achievements and Beyond: Toward Human Aware Whole-Body Controllers for Physical Human Robot Interaction},
author = {Francesco Romano and Gabriele Nava and Morteza Azad and Jernej Camernik and Stefano Dafarra and Oriane Dermy and Claudia Latella and Maria Lazzaroni and Ryan Lober and Marta Lorenzini and Daniele Pucci and Olivier Sigaud and Silvio Traversaro and Jan Babi\v{c} and Serena Ivaldi and Michael Mistry and Vincent Padois and Francesco Nori},
url = {http://ieeexplore.ieee.org/document/8093992/},
doi = {10.1109/LRA.2017.2768126},
issn = {2377-3766},
year = {2018},
date = {2018-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {3},
number = {1},
pages = {516--523},
abstract = {The success of robots in real-world environments is largely dependent on their ability to interact with both humans and said environment.The FP7 EU project CoDyCo focused on the latter of these two challenges by exploiting both rigid and compliant contacts dynamics in the robot control problem. Regarding the former, to properly manage interaction dynamics on the robot control side, an estimation of the human behaviors and intentions is necessary. In this letter, we present the building blocks of such a human-in-the-loop controller, and validate them in both simulation and on the iCub humanoid robot using a human\textendashrobot interaction scenario. In this scenario, a human assists the robot in standing up from being seated on a bench.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
The success of robots in real-world environments is largely dependent on their ability to interact with both humans and said environment.The FP7 EU project CoDyCo focused on the latter of these two challenges by exploiting both rigid and compliant contacts dynamics in the robot control problem. Regarding the former, to properly manage interaction dynamics on the robot control side, an estimation of the human behaviors and intentions is necessary. In this letter, we present the building blocks of such a human-in-the-loop controller, and validate them in both simulation and on the iCub humanoid robot using a human–robot interaction scenario. In this scenario, a human assists the robot in standing up from being seated on a bench.

Šarabon, Nejc; Mekjavić, Igor B; Eiken, Ola; Babič, Jan
The Effect of Bed Rest and Hypoxic Environment on Postural Balance and Trunk Automatic (Re)Actions in Young Healthy Males Journal Article
In: Frontiers in Physiology, vol. 9, pp. 27, 2018, ISSN: 1664-042X.
Abstract | BibTeX | Tags: Muscle Mechanics, Postural Balance | Links:
@article{Sarabon2018,
title = {The Effect of Bed Rest and Hypoxic Environment on Postural Balance and Trunk Automatic (Re)Actions in Young Healthy Males},
author = {Nejc \v{S}arabon and Igor B Mekjavi\'{c} and Ola Eiken and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fphys.2018.00027/full},
doi = {10.3389/fphys.2018.00027},
issn = {1664-042X},
year = {2018},
date = {2018-01-01},
journal = {Frontiers in Physiology},
volume = {9},
pages = {27},
publisher = {Frontiers},
abstract = {Prolonged inactivity, such as bed rest induces several detrimental changes within a short timeframe. Impaired postural balance and responses of trunk muscles to (un)expected perturbations were both shown to be impaired after bed rest. Certain populations (e.g. astronauts) are exposed to hypoxic environment in addition to inactivity, similar to bed rest. While the isolated negative effects of hypoxia on postural balance have been observed before, no study to date has examined the combined effects of hypoxia and bed rest on postural balance or trunk muscle responses. In this study, we examined the effects of 21-day exposure to three conditions: (i) bed rest in hypoxic environment (HBR), (ii) bed rest in normoxic environment (NBR), and (iii) ambulatory hypoxic environment (HAMB). Fourteen healthy male subjects crossed over between conditions in a randomized order, with a 4 month break between conditions to ensure full recovery. Most body sway parameters indicated a similar deterioration of postural balance following both HBR and NBR. Similarly, both anticipatory and reactive responses of the trunk muscles (m. erector spinae and m. multifidus) were impaired after HBR and NBR to a similar degree and mostly unchanged after HAMB. Certain body sway parameters were impaired after HAMB, confirming that hypoxia alone can undermine postural balance. On the other hand, some trunk responses were improved after HAMB. In conclusion, the results of our study confirmed previous findings on negative effects of bed rest, but showed little or no additional effect of hypoxia during bed rest. Physical activity during bed rest is encouraged to preserve neuromuscular functions of the trunk. While the HBR condition in our study resembled conditions during space missions, our results could be relevant to other populations, such as patients with pulmonary diseases exposed to bed rest.},
keywords = {Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Prolonged inactivity, such as bed rest induces several detrimental changes within a short timeframe. Impaired postural balance and responses of trunk muscles to (un)expected perturbations were both shown to be impaired after bed rest. Certain populations (e.g. astronauts) are exposed to hypoxic environment in addition to inactivity, similar to bed rest. While the isolated negative effects of hypoxia on postural balance have been observed before, no study to date has examined the combined effects of hypoxia and bed rest on postural balance or trunk muscle responses. In this study, we examined the effects of 21-day exposure to three conditions: (i) bed rest in hypoxic environment (HBR), (ii) bed rest in normoxic environment (NBR), and (iii) ambulatory hypoxic environment (HAMB). Fourteen healthy male subjects crossed over between conditions in a randomized order, with a 4 month break between conditions to ensure full recovery. Most body sway parameters indicated a similar deterioration of postural balance following both HBR and NBR. Similarly, both anticipatory and reactive responses of the trunk muscles (m. erector spinae and m. multifidus) were impaired after HBR and NBR to a similar degree and mostly unchanged after HAMB. Certain body sway parameters were impaired after HAMB, confirming that hypoxia alone can undermine postural balance. On the other hand, some trunk responses were improved after HAMB. In conclusion, the results of our study confirmed previous findings on negative effects of bed rest, but showed little or no additional effect of hypoxia during bed rest. Physical activity during bed rest is encouraged to preserve neuromuscular functions of the trunk. While the HBR condition in our study resembled conditions during space missions, our results could be relevant to other populations, such as patients with pulmonary diseases exposed to bed rest.
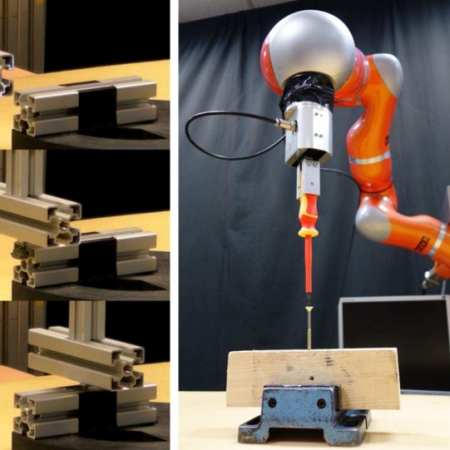
Peternel, Luka; Petrič, Tadej; Babič, Jan
Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation Journal Article
In: Autonomous Robots, vol. 42, no. 1, pp. 1–17, 2018, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Force Control, Human-in-the-Loop Control | Links:
@article{Peternel2018,
title = {Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-017-9635-z},
doi = {10.1007/s10514-017-9635-z},
issn = {0929-5593},
year = {2018},
date = {2018-01-01},
journal = {Autonomous Robots},
volume = {42},
number = {1},
pages = {1--17},
publisher = {Springer US},
abstract = {We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.},
keywords = {Compliance and Impedance Control, Force Control, Human-in-the-Loop Control},
pubstate = {published},
tppubtype = {article}
}
We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.

Petrič, Tadej; Cevzar, Mišel; Babič, Jan
Shared Control for Human-Robot Cooperative Manipulation Tasks Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 787–796, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@incollection{Petric2018,
title = {Shared Control for Human-Robot Cooperative Manipulation Tasks},
author = {Tadej Petri\v{c} and Mi\v{s}el Cevzar and Jan Babi\v{c}},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_83},
doi = {10.1007/978-3-319-61276-8_83},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {787--796},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.},
keywords = {Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.
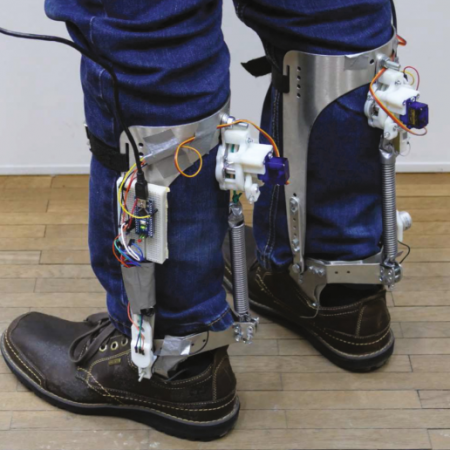
Dežman, Miha; Babič, Jan; Gams, Andrej
Qualitative Assessment of a Clutch-Actuated Ankle Exoskeleton Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 778–786, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Muscle Mechanics | Links:
@incollection{Dezman2018,
title = {Qualitative Assessment of a Clutch-Actuated Ankle Exoskeleton},
author = {Miha De\v{z}man and Jan Babi\v{c} and Andrej Gams},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_82},
doi = {10.1007/978-3-319-61276-8_82},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {778--786},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Among the growing number of different exoskeletons, passive and quasi-passive solutions hold the upper-hand compared to powered solutions in price, accessibility, complexity, weight and user acceptance. This paper evaluates a modification of an originally passive ankle ex- oskeleton with an active clutch, making it quasi-passive. We developed an electric quasi-passive clutch to improve the performance of the orig- inal exoskeleton design, with the aim of mitigating the problems on the clutch engagement timing and user physiological variability. In order to evaluate the exoskeleton and the clutch operation, we performed a study where 7 users wore the exoskeleton and performed trial walks. Qualita- tive user feedback that focused on the device comfort, users perception of exoskeletons effect and smoothness of the clutch operation was col- lected, along with quantitative data on clutch operation during walking on a flat surface. Results show improved and more reliable exoskeleton clutch operation which was also expressed in qualitative user feedback.},
keywords = {Exoskeleton Design and Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {incollection}
}
Among the growing number of different exoskeletons, passive and quasi-passive solutions hold the upper-hand compared to powered solutions in price, accessibility, complexity, weight and user acceptance. This paper evaluates a modification of an originally passive ankle ex- oskeleton with an active clutch, making it quasi-passive. We developed an electric quasi-passive clutch to improve the performance of the orig- inal exoskeleton design, with the aim of mitigating the problems on the clutch engagement timing and user physiological variability. In order to evaluate the exoskeleton and the clutch operation, we performed a study where 7 users wore the exoskeleton and performed trial walks. Qualita- tive user feedback that focused on the device comfort, users perception of exoskeletons effect and smoothness of the clutch operation was col- lected, along with quantitative data on clutch operation during walking on a flat surface. Results show improved and more reliable exoskeleton clutch operation which was also expressed in qualitative user feedback.

Cevzar, Mišel; Petrič, Tadej; Babič, Jan
Open Source EMG Device for Controlling a Robotic Hand Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 797–804, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Machine Learning, Muscle Mechanics | Links:
@incollection{Cevzar2018,
title = {Open Source EMG Device for Controlling a Robotic Hand},
author = {Mi\v{s}el Cevzar and Tadej Petri\v{c} and Jan Babi\v{c}},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_84},
doi = {10.1007/978-3-319-61276-8_84},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {797--804},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Off-the-shelf electronic market is large, diverse and easily accessible by many. Credit card size computers (example: Raspberry Pi) or micro-controller boards (example: Arduino) can be used for learning how to code and how to control embedded systems. Nevertheless, there is a lack of off-the-shelf, open source devices that would enable us to learn about and make use of human signal processing. An example of such a device is an electromyograph (EMG). In this paper we investigated, if an EMG device could fulfill the aforementioned gap. EMG device we used for conducting our experiment was a five channel open source EMG Arduino shield. The performance of the device was evaluated on three healthy male subjects. They were instructed to perform basic finger movements which we classified and executed on the robotic hand. The EMG signal classification was performed using a Support Vector Machine (SVM) algorithm. In our experimental setup the average EMG signal classification accuracy was 78.29%. This we believe demonstrates there are EMG devices on the market today that provide access to cost effective prototyping and learning about EMG signals.},
keywords = {Machine Learning, Muscle Mechanics},
pubstate = {published},
tppubtype = {incollection}
}
Off-the-shelf electronic market is large, diverse and easily accessible by many. Credit card size computers (example: Raspberry Pi) or micro-controller boards (example: Arduino) can be used for learning how to code and how to control embedded systems. Nevertheless, there is a lack of off-the-shelf, open source devices that would enable us to learn about and make use of human signal processing. An example of such a device is an electromyograph (EMG). In this paper we investigated, if an EMG device could fulfill the aforementioned gap. EMG device we used for conducting our experiment was a five channel open source EMG Arduino shield. The performance of the device was evaluated on three healthy male subjects. They were instructed to perform basic finger movements which we classified and executed on the robotic hand. The EMG signal classification was performed using a Support Vector Machine (SVM) algorithm. In our experimental setup the average EMG signal classification accuracy was 78.29%. This we believe demonstrates there are EMG devices on the market today that provide access to cost effective prototyping and learning about EMG signals.
2017
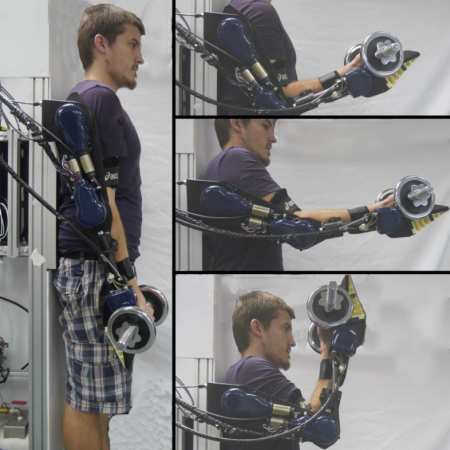
Goljat, Rok; Babič, Jan; Petrič, Tadej; Peternel, Luka; Morimoto, Jun
Power-augmentation control approach for arm exoskeleton based on human muscular manipulability Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 5929–5934, IEEE, 2017, ISSN: 10504729.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Goljat2017,
title = {Power-augmentation control approach for arm exoskeleton based on human muscular manipulability},
author = {Rok Goljat and Jan Babi\v{c} and Tadej Petri\v{c} and Luka Peternel and Jun Morimoto},
url = {https://ieeexplore.ieee.org/document/7989698/},
doi = {10.1109/ICRA.2017.7989698},
issn = {10504729},
year = {2017},
date = {2017-05-01},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {5929--5934},
publisher = {IEEE},
abstract = {The paper presents a novel control method for the arm exoskeletons that takes into account the muscular force manipulability of the human arm. In contrast to classical controllers that provide assistance without considering the biomechanical properties of the human arm, we propose a control method that takes into account the configuration of the arm and the direction of the motion to effectively compensate the anisotropic property of the muscular manipulability of the human arm. Consequently, the proposed control method effectively maintains a spherical endpoint manipulability in the entire workspace of the arm. As a result, the proposed method allows the human using the exoskeleton to efficiently perform tasks in arm configurations that are normally unsuitable due to the low manipulability. We evaluated the proposed approach by a preliminary experimental study where a subject wearing a 2 DOF arm-exoskeleton had to move a 4 kg weight between several locations. The results of our study demonstrate that the proposed approach effectively augments the ability of human motor control to perform tasks equally well in the whole arm workspace that include configurations with low intrinsic manipulability.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper presents a novel control method for the arm exoskeletons that takes into account the muscular force manipulability of the human arm. In contrast to classical controllers that provide assistance without considering the biomechanical properties of the human arm, we propose a control method that takes into account the configuration of the arm and the direction of the motion to effectively compensate the anisotropic property of the muscular manipulability of the human arm. Consequently, the proposed control method effectively maintains a spherical endpoint manipulability in the entire workspace of the arm. As a result, the proposed method allows the human using the exoskeleton to efficiently perform tasks in arm configurations that are normally unsuitable due to the low manipulability. We evaluated the proposed approach by a preliminary experimental study where a subject wearing a 2 DOF arm-exoskeleton had to move a 4 kg weight between several locations. The results of our study demonstrate that the proposed approach effectively augments the ability of human motor control to perform tasks equally well in the whole arm workspace that include configurations with low intrinsic manipulability.
Azad, Morteza; Babič, Jan; Mistry, Michael
Dynamic manipulability of the center of mass: A tool to study, analyse and measure physical ability of robots Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 3484–3490, IEEE, 2017, ISBN: 978-1-5090-4633-1.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2017,
title = {Dynamic manipulability of the center of mass: A tool to study, analyse and measure physical ability of robots},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {https://ieeexplore.ieee.org/document/7989398/},
doi = {10.1109/ICRA.2017.7989398},
isbn = {978-1-5090-4633-1},
year = {2017},
date = {2017-05-01},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {3484--3490},
publisher = {IEEE},
abstract = {This paper introduces dynamic manipulability of the center of mass (CoM) as a metric to measure robots' phys- ical abilities to accelerate their CoMs in different directions. By decomposing the effects of velocity dependent constraints, such as unilateral contacts and friction cones, CoM dynamic manipulability is defined as a velocity independent metric which depends only on robot's configuration and inertial parameters. Thus, this metric is independent of any choice of controller and expresses only physical abilities of robots. This important property makes the proposed metric a proper tool to study, analyse and design current and future robots. The outcome of the CoM dynamic manipulability analysis in this paper is an ellipsoid in the CoM acceleration space which graphically shows accessible points due to the unit weighted norm of joint torques. Physical meanings and concepts of two reasonable choices for the weighting matrix, which is used in the weighted norm of joint torques, are discussed and illustrative examples are presented. Since the proposed metric measures physical ability to accelerate the CoM, it is claimed to be a suitable tool to study balance ability of legged robots.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper introduces dynamic manipulability of the center of mass (CoM) as a metric to measure robots' phys- ical abilities to accelerate their CoMs in different directions. By decomposing the effects of velocity dependent constraints, such as unilateral contacts and friction cones, CoM dynamic manipulability is defined as a velocity independent metric which depends only on robot's configuration and inertial parameters. Thus, this metric is independent of any choice of controller and expresses only physical abilities of robots. This important property makes the proposed metric a proper tool to study, analyse and design current and future robots. The outcome of the CoM dynamic manipulability analysis in this paper is an ellipsoid in the CoM acceleration space which graphically shows accessible points due to the unit weighted norm of joint torques. Physical meanings and concepts of two reasonable choices for the weighting matrix, which is used in the weighted norm of joint torques, are discussed and illustrative examples are presented. Since the proposed metric measures physical ability to accelerate the CoM, it is claimed to be a suitable tool to study balance ability of legged robots.
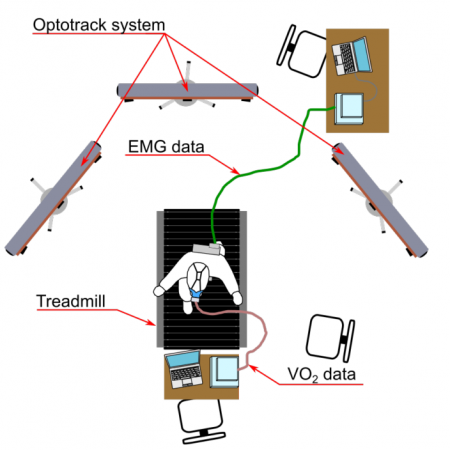
Dežman, Miha; Debevec, Tadej; Babič, Jan; Gams, Andrej
Effects of Passive Ankle Exoskeleton on Human Energy Expenditure: Pilot Evaluation Book Section
In: Advances in Intelligent Systems and Computing, vol. 540, pp. 491–498, Springer, 2017, ISSN: 21945357.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{Dezman2017,
title = {Effects of Passive Ankle Exoskeleton on Human Energy Expenditure: Pilot Evaluation},
author = {Miha De\v{z}man and Tadej Debevec and Jan Babi\v{c} and Andrej Gams},
url = {http://link.springer.com/10.1007/978-3-319-49058-8_53},
doi = {10.1007/978-3-319-49058-8_53},
issn = {21945357},
year = {2017},
date = {2017-01-01},
booktitle = {Advances in Intelligent Systems and Computing},
volume = {540},
pages = {491--498},
publisher = {Springer},
abstract = {Exoskeletons can be utilized for rehabilitation purposes as well as for assistance and augmentation of motion of patients with disabilities, workers, elderly and even healthy people. Compared to powered solutions, unpowered passive exoskeletons have been shown to have significantly higher chances of end user acceptance, because of simpler design, no complex electronics and potentially lower cost. In this paper we present the results of a flat walking test using an unpowered passive ankle exoskeleton. Important exoskeleton aspects such as ergonomics, comfort, and robust design are outlined and areas for improvement are highlighted. The paper also presents the results of the evaluation of the exoskeleton device in a pilot study, where its physiological effects are assessed for four participants via measurements of oxygen consumption and EMG muscle activity during five 10-min walking sessions under different conditions. Results show that significant metabolic cost reduction can only be achieved with a proper mechanism spring selection.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Exoskeletons can be utilized for rehabilitation purposes as well as for assistance and augmentation of motion of patients with disabilities, workers, elderly and even healthy people. Compared to powered solutions, unpowered passive exoskeletons have been shown to have significantly higher chances of end user acceptance, because of simpler design, no complex electronics and potentially lower cost. In this paper we present the results of a flat walking test using an unpowered passive ankle exoskeleton. Important exoskeleton aspects such as ergonomics, comfort, and robust design are outlined and areas for improvement are highlighted. The paper also presents the results of the evaluation of the exoskeleton device in a pilot study, where its physiological effects are assessed for four participants via measurements of oxygen consumption and EMG muscle activity during five 10-min walking sessions under different conditions. Results show that significant metabolic cost reduction can only be achieved with a proper mechanism spring selection.
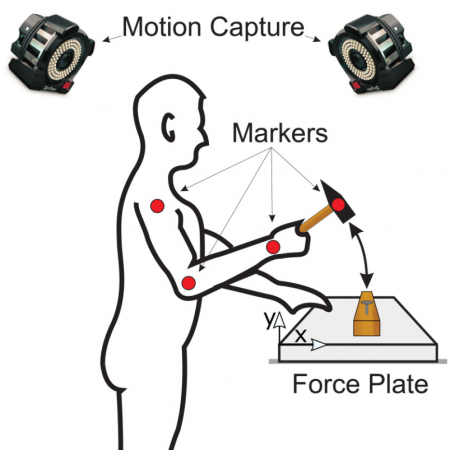
Petrič, Tadej; Simpson, Cole S; Ude, Aleš; Ijspeert, Auke J
Hammering Does Not Fit Fitts' Law Journal Article
In: Frontiers in Computational Neuroscience, vol. 11, no. May, pp. 1–12, 2017, ISSN: 1662-5188.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control | Links:
@article{Petric2017b,
title = {Hammering Does Not Fit Fitts' Law},
author = {Tadej Petri\v{c} and Cole S Simpson and Ale\v{s} Ude and Auke J Ijspeert},
url = {http://journal.frontiersin.org/article/10.3389/fncom.2017.00045/full},
doi = {10.3389/fncom.2017.00045},
issn = {1662-5188},
year = {2017},
date = {2017-01-01},
journal = {Frontiers in Computational Neuroscience},
volume = {11},
number = {May},
pages = {1--12},
abstract = {While movement is essential to human wellbeing, we are still unable to reproduce the deftness and robustness of human movement in automatons or completely restore function to individuals with many types of motor impairment. To better understand how the human nervous system plans and controls movements, neuromechanists employ simple tasks such as upper extremity reaches and isometric force tasks. However, these simple tasks rarely consider impacts and may not capture aspects of motor control that arise from real-world complexity. Here we compared existing models of motor control with the results of a periodic targeted impact task extended from Bernstein's seminal work: hammering a nail into wood. We recorded impact forces and kinematics from 10 subjects hammering at different frequencies and with hammers with different physical properties (mass and face area). We found few statistical differences in most measures between different types of hammer, demonstrating human robustness to minor changes in dynamics. Because human motor control is thought to obey optimality principles, we also developed a feedforward optimal simulation with a neuromechanically inspired cost function that reproduces the experimental data. However, Fitts' Law, which relates movement time to distance traveled and target size, did not match our experimental data. We therefore propose a new model in which the distance moved is a logarithmic function of the time to move that yields better results (R2 ≥ 0.99 compared to R2 ≥ 0.88). These results support the argument that humans control movement in an optimal way, but suggest that Fitts' Law may not generalize to periodic impact tasks.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
While movement is essential to human wellbeing, we are still unable to reproduce the deftness and robustness of human movement in automatons or completely restore function to individuals with many types of motor impairment. To better understand how the human nervous system plans and controls movements, neuromechanists employ simple tasks such as upper extremity reaches and isometric force tasks. However, these simple tasks rarely consider impacts and may not capture aspects of motor control that arise from real-world complexity. Here we compared existing models of motor control with the results of a periodic targeted impact task extended from Bernstein's seminal work: hammering a nail into wood. We recorded impact forces and kinematics from 10 subjects hammering at different frequencies and with hammers with different physical properties (mass and face area). We found few statistical differences in most measures between different types of hammer, demonstrating human robustness to minor changes in dynamics. Because human motor control is thought to obey optimality principles, we also developed a feedforward optimal simulation with a neuromechanically inspired cost function that reproduces the experimental data. However, Fitts' Law, which relates movement time to distance traveled and target size, did not match our experimental data. We therefore propose a new model in which the distance moved is a logarithmic function of the time to move that yields better results (R2 ≥ 0.99 compared to R2 ≥ 0.88). These results support the argument that humans control movement in an optimal way, but suggest that Fitts' Law may not generalize to periodic impact tasks.
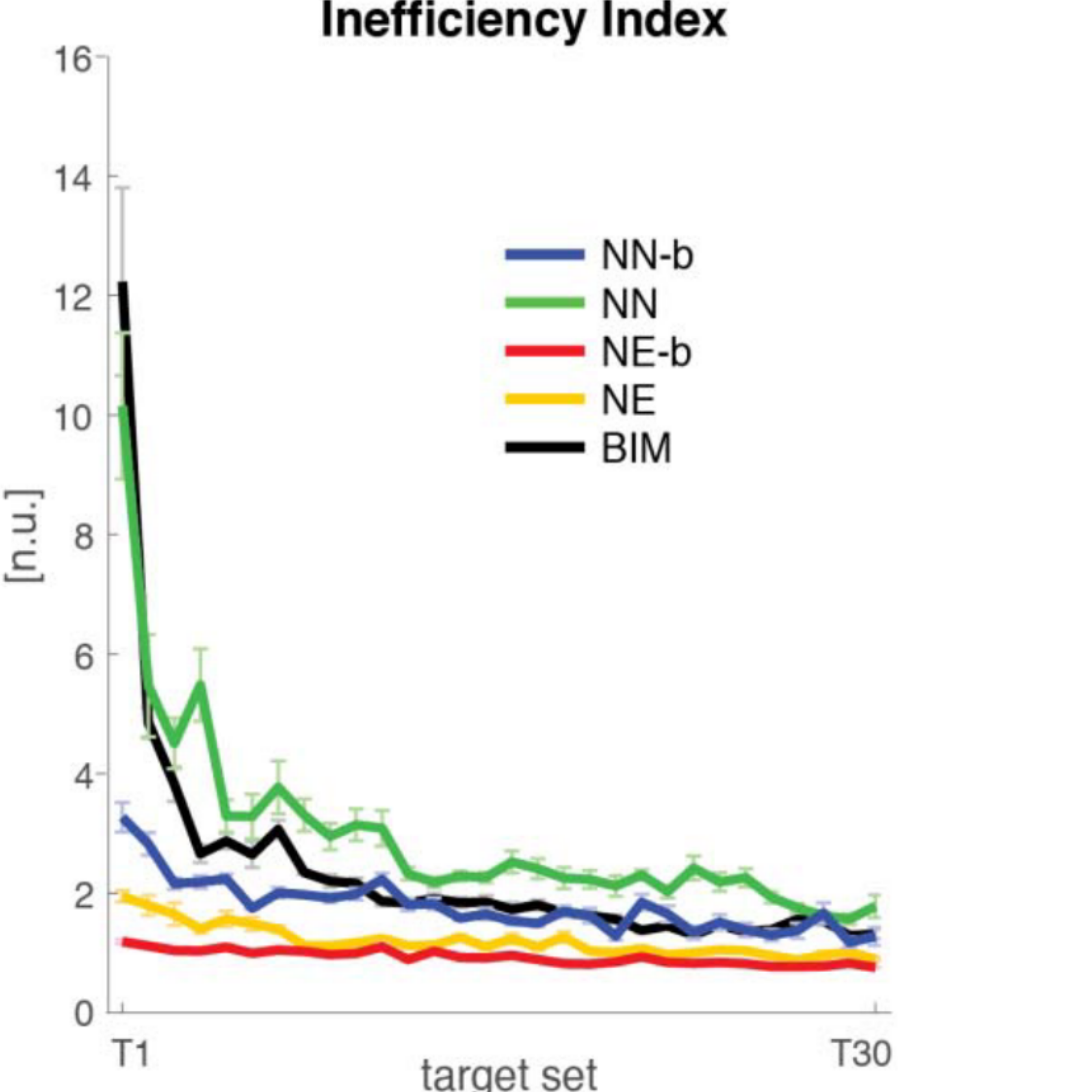
Avila-Mireles, Edwin Johnatan; Zenzeri, Jacopo; Squeri, Valentina; Morasso, Pietro; Santis, Dalia De
Skill learning and skill transfer mediated by cooperative haptic interaction Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, no. 7, pp. 832-843, 2017, ISSN: 15344320.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2017b,
title = {Skill learning and skill transfer mediated by cooperative haptic interaction},
author = {Edwin Johnatan Avila-Mireles and Jacopo Zenzeri and Valentina Squeri and Pietro Morasso and Dalia {De Santis}},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7921690; volume = 25},
doi = {10.1109/TNSRE.2017.2700839},
issn = {15344320},
year = {2017},
date = {2017-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
number = {7},
pages = {832-843},
abstract = {It is known that physical coupling between two subjects may be advantageous in joint tasks. However, little is known about how two people mutually exchange information to exploit the coupling. Therefore we adopted a reversed, novel perspective to the standard one that focuses on the ability of physically coupled subjects to adapt to cooperative contexts that require negotiating a common plan: we investigated how training in pairs on a novel task affects the development of motor skills of each of the interacting partners. The task involved reaching movements in an unstable dynamic environment using a bilateral non-linear elastic tool that could be used bimanually or dyadically. The main result is that training with an expert leads to the greatest performance in the joint task. However, the performance in the individual test is strongly affected by the initial skill level of the partner. Moreover, practicing with a peer rather than an expert appears to be more advantageous for a naive; and motor skills can be transferred to a bimanual context, after training with an expert, only if the non-expert subject had prior experience of the dynamics of the novel task.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
It is known that physical coupling between two subjects may be advantageous in joint tasks. However, little is known about how two people mutually exchange information to exploit the coupling. Therefore we adopted a reversed, novel perspective to the standard one that focuses on the ability of physically coupled subjects to adapt to cooperative contexts that require negotiating a common plan: we investigated how training in pairs on a novel task affects the development of motor skills of each of the interacting partners. The task involved reaching movements in an unstable dynamic environment using a bilateral non-linear elastic tool that could be used bimanually or dyadically. The main result is that training with an expert leads to the greatest performance in the joint task. However, the performance in the individual test is strongly affected by the initial skill level of the partner. Moreover, practicing with a peer rather than an expert appears to be more advantageous for a naive; and motor skills can be transferred to a bimanual context, after training with an expert, only if the non-expert subject had prior experience of the dynamics of the novel task.
Padois, Vincent; Ivaldi, Serena; Babič, Jan; Mistry, Michael; Peters, Jan; Nori, Francesco
Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project Journal Article
In: Robotics and Autonomous Systems, vol. 90, pp. 97–117, 2017, ISSN: 09218890.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@article{Padois2017,
title = {Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project},
author = {Vincent Padois and Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Jan Peters and Francesco Nori},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889016304845},
doi = {10.1016/j.robot.2016.08.017},
issn = {09218890},
year = {2017},
date = {2017-01-01},
journal = {Robotics and Autonomous Systems},
volume = {90},
pages = {97--117},
abstract = {Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, forthcoming robotic research needs to investigate the principles governing whole-body motion and coordination with contact dynamics. There is a need to investigate the principles of motion and coordination of physical interaction, including the aspects related to unpredictability. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement. Last but not least, theoretical results needs to be validated in real-world scenarios with humanoid robots engaged in whole-body goal-directed tasks. Robots should be capable of exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilising assistive physical interaction from humans. The work presented in this paper presents state-of-the-art in these domains as well as some recent advances made within the framework of the CoDyCo European project.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, forthcoming robotic research needs to investigate the principles governing whole-body motion and coordination with contact dynamics. There is a need to investigate the principles of motion and coordination of physical interaction, including the aspects related to unpredictability. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement. Last but not least, theoretical results needs to be validated in real-world scenarios with humanoid robots engaged in whole-body goal-directed tasks. Robots should be capable of exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilising assistive physical interaction from humans. The work presented in this paper presents state-of-the-art in these domains as well as some recent advances made within the framework of the CoDyCo European project.
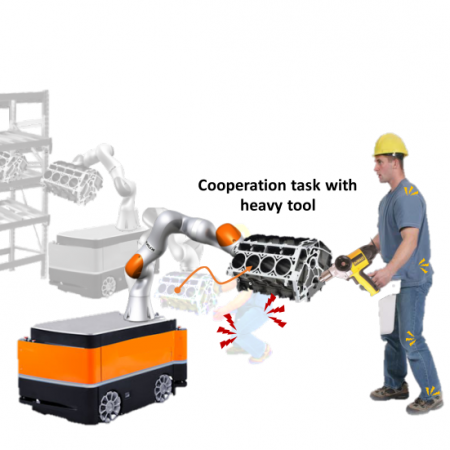
Peternel, Luka; Kim, Wansoo; Babič, Jan; Ajoudani, Arash
Towards ergonomic control of human-robot co-manipulation and handover Proceedings Article
In: 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), pp. 55–60, IEEE, Birmingham, 2017, ISBN: 978-1-5386-4678-6.
Abstract | BibTeX | Tags: Ergonomy, Physical Human Robot Interaction | Links:
@inproceedings{Peternel2017a,
title = {Towards ergonomic control of human-robot co-manipulation and handover},
author = {Luka Peternel and Wansoo Kim and Jan Babi\v{c} and Arash Ajoudani},
url = {http://ieeexplore.ieee.org/document/8239537/},
doi = {10.1109/HUMANOIDS.2017.8239537},
isbn = {978-1-5386-4678-6},
year = {2017},
date = {2017-01-01},
booktitle = {2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids)},
pages = {55--60},
publisher = {IEEE},
address = {Birmingham},
abstract = {In this paper, we propose a novel method for the control of human-robot co-manipulation that takes into account the ergonomic requirements for the human co-worker. The robot uses a whole-body dynamic model of the human to optimise for the position of the co-manipulation task in the workspace. In this configuration, the overloading joint torques, i.e. the effects of an external load in human body joints, are minimised. In addition, the optimisation process includes several constraints, such as human arm manipulability properties, to ensure that the human has a good manipulation capacity in the given configuration. The main advantage of this approach is that the robot can potentially help to reduce the work-related strain and increase the productivity of the human co-worker. In addition, the on-line estimation of the overloading joint torques does not require an external force plate or sensor insoles. We validated the proposed method with experiments in two co-manipulation tasks: human using a device to polish an object that is delivered by the robot and a human-robot object handover. The results show that the proposed method is successful in achieving the ergonomic conditions for the human during},
keywords = {Ergonomy, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper, we propose a novel method for the control of human-robot co-manipulation that takes into account the ergonomic requirements for the human co-worker. The robot uses a whole-body dynamic model of the human to optimise for the position of the co-manipulation task in the workspace. In this configuration, the overloading joint torques, i.e. the effects of an external load in human body joints, are minimised. In addition, the optimisation process includes several constraints, such as human arm manipulability properties, to ensure that the human has a good manipulation capacity in the given configuration. The main advantage of this approach is that the robot can potentially help to reduce the work-related strain and increase the productivity of the human co-worker. In addition, the on-line estimation of the overloading joint torques does not require an external force plate or sensor insoles. We validated the proposed method with experiments in two co-manipulation tasks: human using a device to polish an object that is delivered by the robot and a human-robot object handover. The results show that the proposed method is successful in achieving the ergonomic conditions for the human during
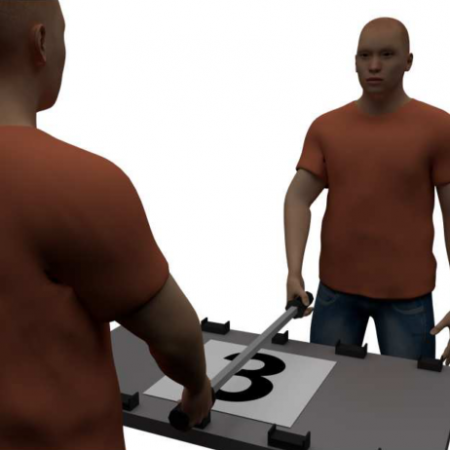
Petrič, Tadej; Cevzar, Mišel; Babič, Jan
Utilizing speed-accuracy trade-off models for human-robot coadaptation during cooperative groove fitting task Proceedings Article
In: 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), pp. 107–112, IEEE, Birmingham, 2017, ISBN: 978-1-5386-4678-6.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction | Links:
@inproceedings{Petric2017,
title = {Utilizing speed-accuracy trade-off models for human-robot coadaptation during cooperative groove fitting task},
author = {Tadej Petri\v{c} and Mi\v{s}el Cevzar and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/8239544/},
doi = {10.1109/HUMANOIDS.2017.8239544},
isbn = {978-1-5386-4678-6},
year = {2017},
date = {2017-01-01},
booktitle = {2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids)},
pages = {107--112},
publisher = {IEEE},
address = {Birmingham},
abstract = {What are the benefits of performing a task with other partners in a physically interactive manipulation task setups? By utilizing a novel human motor learning paradigm, where two individuals are aware of each other and their hands are physically connected through an object, we investigated how each partner adapts his/her motor behavior. We first analyzed performance of twenty subjects on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested efficiency and accuracy of performing the task in two different scenarios: a) one human alone \textendash twenty subjects; b) two humans cooperating \textendash ten pairs. We observed that the task performance during cooperative manipulation of an object does not follow any rules, i.e. either both partners get worse, or both get better, or one partner get and one get worse. By exploiting this properties, we propose a novel control algorithm for robots in physically interactive and cooperative human-robot setups, where the robot adapts to the performance of his/hers partner. This way, it allows the human partner to improve his/hers task performance. The results show that the proposed approach can successfully adapt and match motion of the human partner, and thereby enable the human partner to improve his/her motor skills. After adaption, the human coupled with a robotic partner, can perform the task faster.},
keywords = {Human Motor Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
What are the benefits of performing a task with other partners in a physically interactive manipulation task setups? By utilizing a novel human motor learning paradigm, where two individuals are aware of each other and their hands are physically connected through an object, we investigated how each partner adapts his/her motor behavior. We first analyzed performance of twenty subjects on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested efficiency and accuracy of performing the task in two different scenarios: a) one human alone – twenty subjects; b) two humans cooperating – ten pairs. We observed that the task performance during cooperative manipulation of an object does not follow any rules, i.e. either both partners get worse, or both get better, or one partner get and one get worse. By exploiting this properties, we propose a novel control algorithm for robots in physically interactive and cooperative human-robot setups, where the robot adapts to the performance of his/hers partner. This way, it allows the human partner to improve his/hers task performance. The results show that the proposed approach can successfully adapt and match motion of the human partner, and thereby enable the human partner to improve his/her motor skills. After adaption, the human coupled with a robotic partner, can perform the task faster.

Rijcke, Laura De; Näf, Matthias; Rodriguez-Guerrero, Carlos; Graimann, Bernhard; Houdijk, Han; van Dieën, Jaap; Mombaur, Katja; Russold, Michael; Sarabon, Nejc; Babič, Jan; Lefeber, Dirk
SPEXOR: Towards a Passive Spinal Exoskeleton Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, vol. 16, pp. 325–329, Springer International Publishing, 2017, ISBN: 978-3-319-46531-9.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{DeRijcke2017,
title = {SPEXOR: Towards a Passive Spinal Exoskeleton},
author = {Laura {De Rijcke} and Matthias N\"{a}f and Carlos Rodriguez-Guerrero and Bernhard Graimann and Han Houdijk and Jaap van Die\"{e}n and Katja Mombaur and Michael Russold and Nejc Sarabon and Jan Babi\v{c} and Dirk Lefeber},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_53},
doi = {10.1007/978-3-319-46532-6_53},
isbn = {978-3-319-46531-9},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
volume = {16},
pages = {325--329},
publisher = {Springer International Publishing},
abstract = {Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In this part of the SPEXOR project we will fill this gap and design a novel, passive spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In this part of the SPEXOR project we will fill this gap and design a novel, passive spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.
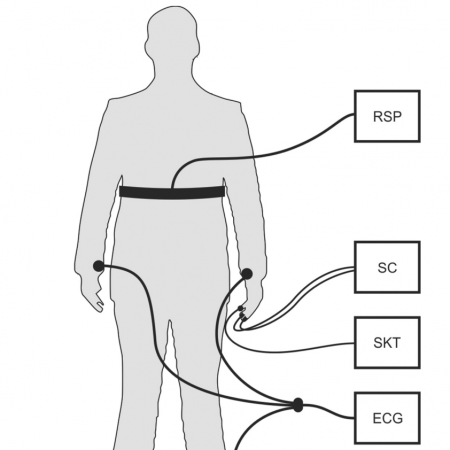
Frelih, Nina Gržinič; Podlesek, Anja; Babič, Jan; Geršak, Gregor
Evaluation of psychological effects on human postural stability Journal Article
In: Measurement, vol. 98, pp. 186–191, 2017, ISSN: 02632241.
Abstract | BibTeX | Tags: Postural Balance | Links:
@article{GrzinicFrelih2017,
title = {Evaluation of psychological effects on human postural stability},
author = {Nina {Gr\v{z}ini\v{c} Frelih} and Anja Podlesek and Jan Babi\v{c} and Gregor Ger\v{s}ak},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0263224116306844},
doi = {10.1016/j.measurement.2016.11.039},
issn = {02632241},
year = {2017},
date = {2017-01-01},
journal = {Measurement},
volume = {98},
pages = {186--191},
abstract = {Human postural stability is commonly assessed by a set of posturographic tests during quiet upright standing. Numerous studies extend these tests with cognitive and mental tasks where various physiological and biomechanical sensors are used in combination with a force plate. The aim of our study was to determine whether psychological effects of sensor attachment and the awareness of the subject being measured could influence the posturographic tests performed using the force plate. An experiment was performed where complete data from 51 participants (13 women and 38 men) were obtained in four different conditions. Posturographic tests were performed either with eyes open or eyes closed, and either with biomedical instrumentation sensors attached or not attached. The results indicate that the presence of biomedical instrumentation sensors had a statistically significant impact on the centre of pressure path length and ellipse area as well as on the perceived difficulty of the task and its pleasantness. We conclude that the attachment of sensors on the body of the participants during biomechanical experiments significantly affects the perception of the experimental situation and alters the output of posturographic tests. It is therefore important to appropriately take into account the possible effects of psychological strain (such as the awareness of being measured) in the experimental design and in the interpretation of the results.},
keywords = {Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Human postural stability is commonly assessed by a set of posturographic tests during quiet upright standing. Numerous studies extend these tests with cognitive and mental tasks where various physiological and biomechanical sensors are used in combination with a force plate. The aim of our study was to determine whether psychological effects of sensor attachment and the awareness of the subject being measured could influence the posturographic tests performed using the force plate. An experiment was performed where complete data from 51 participants (13 women and 38 men) were obtained in four different conditions. Posturographic tests were performed either with eyes open or eyes closed, and either with biomedical instrumentation sensors attached or not attached. The results indicate that the presence of biomedical instrumentation sensors had a statistically significant impact on the centre of pressure path length and ellipse area as well as on the perceived difficulty of the task and its pleasantness. We conclude that the attachment of sensors on the body of the participants during biomechanical experiments significantly affects the perception of the experimental situation and alters the output of posturographic tests. It is therefore important to appropriately take into account the possible effects of psychological strain (such as the awareness of being measured) in the experimental design and in the interpretation of the results.
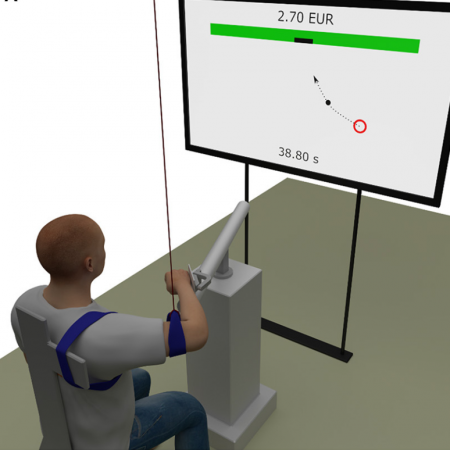
Peternel, Luka; Sigaud, Olivier; Babič, Jan
Unifying Speed-Accuracy Trade-Off and Cost-Benefit Trade-Off in Human Reaching Movements Journal Article
In: Frontiers in Human Neuroscience, vol. 11, pp. 615, 2017, ISSN: 1662-5161.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control | Links:
@article{Peternel2017b,
title = {Unifying Speed-Accuracy Trade-Off and Cost-Benefit Trade-Off in Human Reaching Movements},
author = {Luka Peternel and Olivier Sigaud and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fnhum.2017.00615/full},
doi = {10.3389/fnhum.2017.00615},
issn = {1662-5161},
year = {2017},
date = {2017-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {11},
pages = {615},
abstract = {Two basic trade-offs interact while our brain decides how to move our body. First, with the cost-benefit trade-off, the brain trades between the importance of moving faster toward a target that is more rewarding and the increased muscular cost resulting from a faster movement. Second, with the speed-accuracy trade-off, the brain trades between how accurate the movement needs to be and the time it takes to achieve such accuracy. So far, these two trade-offs have been well studied in isolation, despite their obvious interdependence. To overcome this limitation, we propose a new model that is able to simultaneously account for both trade-offs. The model assumes that the central nervous system maximizes the expected utility resulting from the potential reward and the cost over the repetition of many movements, taking into account the probability to miss the target. The resulting model is able to account for both the speed-accuracy and the cost-benefit trade-offs. To validate the proposed hypothesis, we confront the properties of the computational model to data from an experimental study where subjects have to reach for targets by performing arm movements in a horizontal plane. The results qualitatively show that the proposed model successfully accounts for both cost-benefit and speed-accuracy trade-offs.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Two basic trade-offs interact while our brain decides how to move our body. First, with the cost-benefit trade-off, the brain trades between the importance of moving faster toward a target that is more rewarding and the increased muscular cost resulting from a faster movement. Second, with the speed-accuracy trade-off, the brain trades between how accurate the movement needs to be and the time it takes to achieve such accuracy. So far, these two trade-offs have been well studied in isolation, despite their obvious interdependence. To overcome this limitation, we propose a new model that is able to simultaneously account for both trade-offs. The model assumes that the central nervous system maximizes the expected utility resulting from the potential reward and the cost over the repetition of many movements, taking into account the probability to miss the target. The resulting model is able to account for both the speed-accuracy and the cost-benefit trade-offs. To validate the proposed hypothesis, we confront the properties of the computational model to data from an experimental study where subjects have to reach for targets by performing arm movements in a horizontal plane. The results qualitatively show that the proposed model successfully accounts for both cost-benefit and speed-accuracy trade-offs.
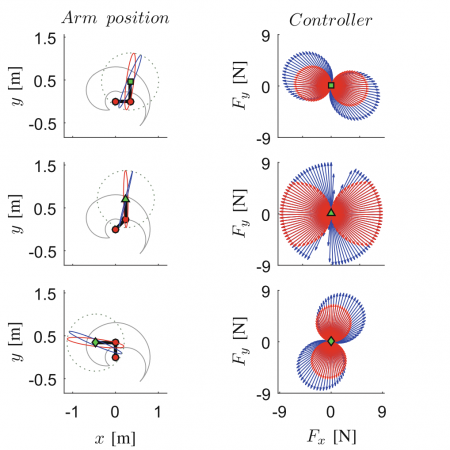
Goljat, Rok; Petrič, Tadej; Babič, Jan
Upper Limb Exoskeleton Control for Isotropic Sensitivity of Human Arm Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, vol. 16, pp. 433–437, Springer International Publishing, 2017, ISBN: 978-3-319-46531-9.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@incollection{Goljat2017a,
title = {Upper Limb Exoskeleton Control for Isotropic Sensitivity of Human Arm},
author = {Rok Goljat and Tadej Petri\v{c} and Jan Babi\v{c}},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_71},
doi = {10.1007/978-3-319-46532-6_71},
isbn = {978-3-319-46531-9},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
volume = {16},
pages = {433--437},
publisher = {Springer International Publishing},
abstract = {Most of today's assistive devices are controlled to provide uniform assis- tance irrespectively from the configuration of the human arm and the direction of the movement. We propose an innovative control method for arm exoskeletons that takes into account both of these parameters and compensates the anisotropic property of the force manipulability measure, intrinsic to the biomechanics of the human arm. To test our controller we designed a set of reaching tasks where the subjects had to carry two different loads to targets at five different locations and of two different sizes. Reaching times and trajectories were analysed for the evaluation of the controller. Through the analysis of the average reaching times we found that our method suc- cessfully enhances the motion while the analysis of the average maximal deviation from the ideal trajectories showed that our method does not induce any additional dynamic behaviour to the user.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {incollection}
}
Most of today's assistive devices are controlled to provide uniform assis- tance irrespectively from the configuration of the human arm and the direction of the movement. We propose an innovative control method for arm exoskeletons that takes into account both of these parameters and compensates the anisotropic property of the force manipulability measure, intrinsic to the biomechanics of the human arm. To test our controller we designed a set of reaching tasks where the subjects had to carry two different loads to targets at five different locations and of two different sizes. Reaching times and trajectories were analysed for the evaluation of the controller. Through the analysis of the average reaching times we found that our method suc- cessfully enhances the motion while the analysis of the average maximal deviation from the ideal trajectories showed that our method does not induce any additional dynamic behaviour to the user.
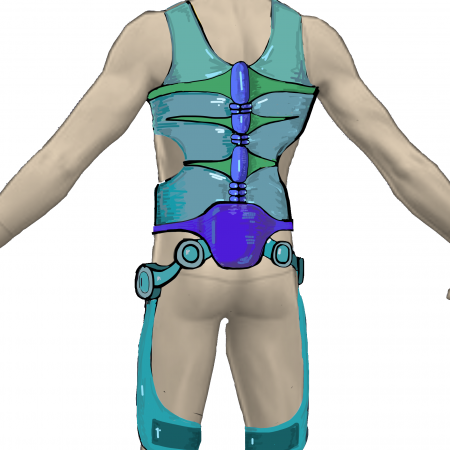
Babič, Jan; Mombaur, Katja; Lefeber, Dirk; van Dieën, Jaap; Graimann, Bernhard; Russold, Michael; Šarabon, Nejc; Houdijk, Han
SPEXOR: Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, pp. 311–315, Springer International Publishing, 2017.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{Babic2017,
title = {SPEXOR: Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration},
author = {Jan Babi\v{c} and Katja Mombaur and Dirk Lefeber and Jaap van Die\"{e}n and Bernhard Graimann and Michael Russold and Nejc \v{S}arabon and Han Houdijk},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_51},
doi = {10.1007/978-3-319-46532-6_51},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
pages = {311--315},
publisher = {Springer International Publishing},
abstract = {Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In the SPEXOR project we will fill this gap and design a novel spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In the SPEXOR project we will fill this gap and design a novel spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.

Potočanac, Zrinka; Goljat, Rok; Babič, Jan
A robotic system for delivering novel real-time, movement dependent perturbations Journal Article
In: Gait & Posture, vol. 58, pp. 386–389, 2017, ISSN: 09666362.
Abstract | BibTeX | Tags: Human Motor Control, Postural Balance, Robot Design | Links:
@article{Potocanac2017,
title = {A robotic system for delivering novel real-time, movement dependent perturbations},
author = {Zrinka Poto\v{c}anac and Rok Goljat and Jan Babi\v{c}},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0966636217308949},
doi = {10.1016/j.gaitpost.2017.08.038},
issn = {09666362},
year = {2017},
date = {2017-01-01},
journal = {Gait \& Posture},
volume = {58},
pages = {386--389},
abstract = {Perturbations are often used to study movement control and balance, especially in the context of falling. Most often, discrete perturbations defined prior to the experiment are used to mimic external disturbances to balance. However, the largest proportion of falls is due to self-generated errors in weight shifting. Inspired by self-generated weight shifting errors, we created a novel, continuous mediolateral perturbation proportional to subjects' mediolateral center of mass movement with minimal delays. This perturbation was delivered by a robotic platform controlled by a real time Matlab Simulink model using kinematic data from a marker positioned at subjects' L5 as input. Fifteen healthy young adults stood as still as possible atop the robotic platform with their eyes closed. We evaluated the performance of the perturbation in terms of accuracy and delay relative to the input signal by using cross-correlations. The perturbations were accurate (r = −0.984), with delays of 154 ms. Such systematic perturbation significantly affected mediolateral sway, increasing its range (from 5.56 ± 3.72 to 9.58 ± 4.83 mm},
keywords = {Human Motor Control, Postural Balance, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Perturbations are often used to study movement control and balance, especially in the context of falling. Most often, discrete perturbations defined prior to the experiment are used to mimic external disturbances to balance. However, the largest proportion of falls is due to self-generated errors in weight shifting. Inspired by self-generated weight shifting errors, we created a novel, continuous mediolateral perturbation proportional to subjects' mediolateral center of mass movement with minimal delays. This perturbation was delivered by a robotic platform controlled by a real time Matlab Simulink model using kinematic data from a marker positioned at subjects' L5 as input. Fifteen healthy young adults stood as still as possible atop the robotic platform with their eyes closed. We evaluated the performance of the perturbation in terms of accuracy and delay relative to the input signal by using cross-correlations. The perturbations were accurate (r = −0.984), with delays of 154 ms. Such systematic perturbation significantly affected mediolateral sway, increasing its range (from 5.56 ± 3.72 to 9.58 ± 4.83 mm
2016
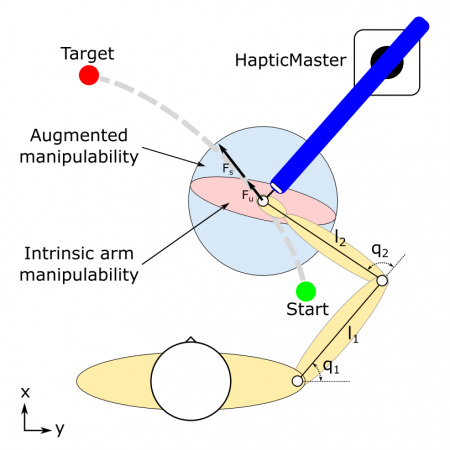
Petrič, Tadej; Goljat, Rok; Babič, Jan
Augmentation of human arm motor control by isotropic force manipulability Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 696–701, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Petric2016a,
title = {Augmentation of human arm motor control by isotropic force manipulability},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759128/},
doi = {10.1109/IROS.2016.7759128},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-10-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {696--701},
publisher = {IEEE},
address = {Daejeon},
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.
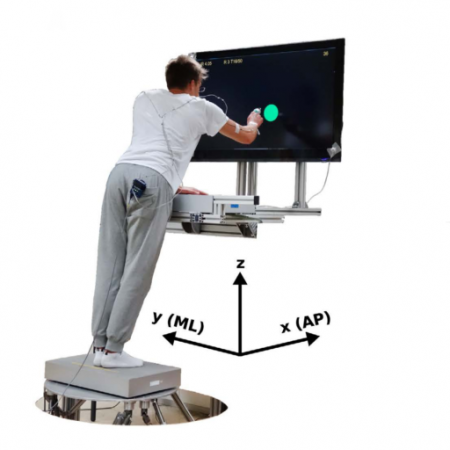
Rueckert, Elmar; Čamernik, Jernej; Peters, Jan; Babič, Jan
Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control Journal Article
In: Scientific Reports, vol. 6, no. 1, pp. 28455, 2016, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning | Links:
@article{Rueckert2016,
title = {Probabilistic Movement Models Show that Postural Control Precedes and Predicts Volitional Motor Control},
author = {Elmar Rueckert and Jernej \v{C}amernik and Jan Peters and Jan Babi\v{c}},
url = {http://www.nature.com/articles/srep28455},
doi = {10.1038/srep28455},
issn = {2045-2322},
year = {2016},
date = {2016-09-01},
journal = {Scientific Reports},
volume = {6},
number = {1},
pages = {28455},
publisher = {Nature Publishing Group},
abstract = {Human motor skill learning is driven by the necessity to adapt to new situations. While supportive contacts are essential for many tasks, little is known about their impact on motor learning. To study the effect of contacts an innovative full-body experimental paradigm was established. The task of the subjects was to reach for a distant target while postural stability could only be maintained by establishing an additional supportive hand contact. To examine adaptation, non-trivial postural perturbations of the subjects' support base were systematically introduced. A novel probabilistic trajectory model approach was employed to analyze the correlation between the motions of both arms and the trunk. We found that subjects adapted to the perturbations by establishing target dependent hand contacts. Moreover, we found that the trunk motion adapted significantly faster than the motion of the arms. However, the most striking finding was that observations of the initial phase of the left arm or trunk motion (100-400 ms) were sufficient to faithfully predict the complete movement of the right arm. Overall, our results suggest that the goal-directed arm movements determine the supportive arm motions and that the motion of heavy body parts adapts faster than the light arms.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Optimal Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Human motor skill learning is driven by the necessity to adapt to new situations. While supportive contacts are essential for many tasks, little is known about their impact on motor learning. To study the effect of contacts an innovative full-body experimental paradigm was established. The task of the subjects was to reach for a distant target while postural stability could only be maintained by establishing an additional supportive hand contact. To examine adaptation, non-trivial postural perturbations of the subjects' support base were systematically introduced. A novel probabilistic trajectory model approach was employed to analyze the correlation between the motions of both arms and the trunk. We found that subjects adapted to the perturbations by establishing target dependent hand contacts. Moreover, we found that the trunk motion adapted significantly faster than the motion of the arms. However, the most striking finding was that observations of the initial phase of the left arm or trunk motion (100-400 ms) were sufficient to faithfully predict the complete movement of the right arm. Overall, our results suggest that the goal-directed arm movements determine the supportive arm motions and that the motion of heavy body parts adapts faster than the light arms.

Ivaldi, Serena; Babič, Jan; Mistry, Michael; Murphy, Robin
Special issue on whole-body control of contacts and dynamics for humanoid robots Journal Article
In: Autonomous Robots, vol. 40, no. 3, pp. 425–428, 2016, ISSN: 0929-5593.
BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion, Force Control | Links:
@article{Ivaldi2016,
title = {Special issue on whole-body control of contacts and dynamics for humanoid robots},
author = {Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Robin Murphy},
url = {http://link.springer.com/10.1007/s10514-016-9545-5},
doi = {10.1007/s10514-016-9545-5},
issn = {0929-5593},
year = {2016},
date = {2016-03-01},
journal = {Autonomous Robots},
volume = {40},
number = {3},
pages = {425--428},
keywords = {Compliance and Impedance Control, Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
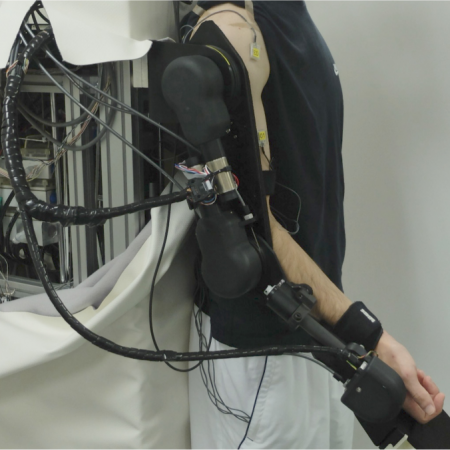
Peternel, Luka; Noda, Tomoyuki; Petrič, Tadej; Ude, Aleš; Morimoto, Jun; Babič, Jan
Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation Journal Article
In: PLOS ONE, vol. 11, no. 2, pp. e0148942, 2016, ISSN: 1932-6203.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Muscle Mechanics | Links:
@article{Peternel2016b,
title = {Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation},
author = {Luka Peternel and Tomoyuki Noda and Tadej Petri\v{c} and Ale\v{s} Ude and Jun Morimoto and Jan Babi\v{c}},
editor = {Dingguo Zhang},
url = {http://dx.plos.org/10.1371/journal.pone.0148942},
doi = {10.1371/journal.pone.0148942},
issn = {1932-6203},
year = {2016},
date = {2016-02-01},
journal = {PLOS ONE},
volume = {11},
number = {2},
pages = {e0148942},
abstract = {In this paper we propose an exoskeleton control method for adaptive learning of assistive joint torque profiles in periodic tasks. We use human muscle activity as feedback to adapt the assistive joint torque behaviour in a way that the muscle activity is minimised. The user can then relax while the exoskeleton takes over the task execution. If the task is altered and the existing assistive behaviour becomes inadequate, the exoskeleton gradually adapts to the new task execution so that the increased muscle activity caused by the new desired task can be reduced. The advantage of the proposed method is that it does not require biomechanical or dynamical models. Our proposed learning system uses Dynamical Movement Primitives (DMPs) as a trajectory generator and parameters of DMPs are modulated using Locally Weighted Regression. Then, the learning system is combined with adaptive oscillators that determine the phase and frequency of motion according to measured Electromyography (EMG) signals. We tested the method with real robot experiments where subjects wearing an elbow exoskeleton had to move an object of an unknown mass according to a predefined reference motion. We further evaluated the proposed approach on a whole-arm exoskeleton to show that it is able to adaptively derive assistive torques even for multiple-joint motion.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Muscle Mechanics},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose an exoskeleton control method for adaptive learning of assistive joint torque profiles in periodic tasks. We use human muscle activity as feedback to adapt the assistive joint torque behaviour in a way that the muscle activity is minimised. The user can then relax while the exoskeleton takes over the task execution. If the task is altered and the existing assistive behaviour becomes inadequate, the exoskeleton gradually adapts to the new task execution so that the increased muscle activity caused by the new desired task can be reduced. The advantage of the proposed method is that it does not require biomechanical or dynamical models. Our proposed learning system uses Dynamical Movement Primitives (DMPs) as a trajectory generator and parameters of DMPs are modulated using Locally Weighted Regression. Then, the learning system is combined with adaptive oscillators that determine the phase and frequency of motion according to measured Electromyography (EMG) signals. We tested the method with real robot experiments where subjects wearing an elbow exoskeleton had to move an object of an unknown mass according to a predefined reference motion. We further evaluated the proposed approach on a whole-arm exoskeleton to show that it is able to adaptively derive assistive torques even for multiple-joint motion.
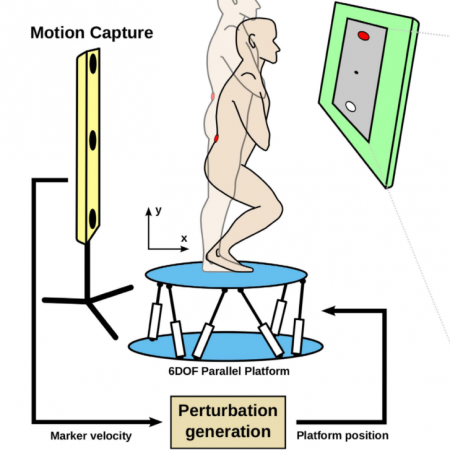
Babič, Jan; Oztop, Erhan; Kawato, Mitsuo
Human motor adaptation in whole body motion Journal Article
In: Scientific Reports, vol. 6, no. 1, pp. 32868, 2016, ISSN: 2045-2322.
Abstract | BibTeX | Tags: Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning | Links:
@article{Babic2016,
title = {Human motor adaptation in whole body motion},
author = {Jan Babi\v{c} and Erhan Oztop and Mitsuo Kawato},
url = {http://www.nature.com/articles/srep32868},
doi = {10.1038/srep32868},
issn = {2045-2322},
year = {2016},
date = {2016-01-01},
journal = {Scientific Reports},
volume = {6},
number = {1},
pages = {32868},
publisher = {Nature Publishing Group},
abstract = {The main role of the sensorimotor system of an organism is to increase the survival of the species. Therefore, to understand the adaptation and optimality mechanisms of motor control, it is necessary to study the sensorimotor system in terms of ecological fitness. We designed an experimental paradigm that exposed sensorimotor system to risk of injury. We studied human subjects performing uncon- strained squat-to-stand movements that were systematically subjected to non-trivial perturbation. We found that subjects adapted by actively compensating the perturbations, converging to movements that were different from their normal unperturbed squat-to-stand movements. Furthermore, the adapted movements had clear intrinsic inter-subject differences which could be explained by different adapta- tion strategies employed by the subjects. These results suggest that classical optimality measures of physical energy and task satisfaction should be seen as part of a hierarchical organization of optimality with safety being at the highest level. Therefore, in addition to physical energy and task fulfillment, the risk of injury and other possible costs such as neural computational overhead have to be considered when analyzing human movement.},
keywords = {Human Motor Control, Neuromusculoskeletal Modelling, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
The main role of the sensorimotor system of an organism is to increase the survival of the species. Therefore, to understand the adaptation and optimality mechanisms of motor control, it is necessary to study the sensorimotor system in terms of ecological fitness. We designed an experimental paradigm that exposed sensorimotor system to risk of injury. We studied human subjects performing uncon- strained squat-to-stand movements that were systematically subjected to non-trivial perturbation. We found that subjects adapted by actively compensating the perturbations, converging to movements that were different from their normal unperturbed squat-to-stand movements. Furthermore, the adapted movements had clear intrinsic inter-subject differences which could be explained by different adapta- tion strategies employed by the subjects. These results suggest that classical optimality measures of physical energy and task satisfaction should be seen as part of a hierarchical organization of optimality with safety being at the highest level. Therefore, in addition to physical energy and task fulfillment, the risk of injury and other possible costs such as neural computational overhead have to be considered when analyzing human movement.
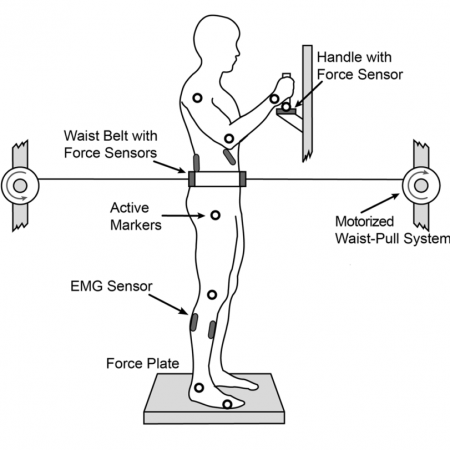
Čamernik, Jernej; Potočanac, Zrinka; Peternel, Luka; Babič, Jan
Holding a Handle for Balance during Continuous Postural Perturbations—Immediate and Transitionary Effects on Whole Body Posture Journal Article
In: Frontiers in Human Neuroscience, vol. 10, pp. 486, 2016, ISSN: 1662-5161.
Abstract | BibTeX | Tags: Ergonomy, Postural Balance, Sensorimotor Learning | Links:
@article{Camernik2016,
title = {Holding a Handle for Balance during Continuous Postural Perturbations\textemdashImmediate and Transitionary Effects on Whole Body Posture},
author = {Jernej \v{C}amernik and Zrinka Poto\v{c}anac and Luka Peternel and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fnhum.2016.00486},
doi = {10.3389/fnhum.2016.00486},
issn = {1662-5161},
year = {2016},
date = {2016-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {10},
pages = {486},
publisher = {Frontiers},
abstract = {When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.},
keywords = {Ergonomy, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.
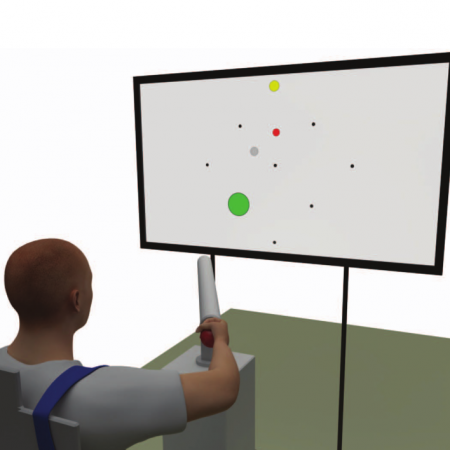
Petrič, Tadej; Goljat, Rok; Babič, Jan
Cooperative human-robot control based on Fitts' law Proceedings Article
In: 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pp. 345–350, IEEE, Cancun, 2016, ISBN: 978-1-5090-4718-5.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@inproceedings{Petric2016b,
title = {Cooperative human-robot control based on Fitts' law},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7803299/},
doi = {10.1109/HUMANOIDS.2016.7803299},
isbn = {978-1-5090-4718-5},
year = {2016},
date = {2016-01-01},
booktitle = {2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids)},
pages = {345--350},
publisher = {IEEE},
address = {Cancun},
abstract = {Many studies on human motor control have exam- ined how humans move the arms. A well known phenomenon known as the Fitts' law describes the trade-off between the speed of motion and its accuracy. In robotics, many studies were performed, and different control methods were proposed, for robots working in well structured environments. Neverthe- less, the cooperation between humans and robots remains a challenging task that is highly relevant for robots aiming to work together with humans in non-structured environments. In this paper we propose a novel method for on-line adap- tation of robotic trajectories, where humans and robots are autonomous agents coupled through physical interaction, for example through manipulated object. Within the proposed framework, the robot adapts to the human motion through the sensory feedback by taking into account the Fitts' law where the user specific behavior is estimated using a recursive least square updates. The movement trajectories are represented by the Dynamic Movement Primitives, where the adaptation relies on the Iterative Learning Controller framework. The proposed approach was evaluated by a cooperative human robot arm- reaching task on a plane. We tested the accuracy and efficiency of the proposed method, showed its relevance and demonstrated that the proposed approach fully adapts to the human motor control and maintains the desired accuracy of the movement.},
keywords = {Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Many studies on human motor control have exam- ined how humans move the arms. A well known phenomenon known as the Fitts' law describes the trade-off between the speed of motion and its accuracy. In robotics, many studies were performed, and different control methods were proposed, for robots working in well structured environments. Neverthe- less, the cooperation between humans and robots remains a challenging task that is highly relevant for robots aiming to work together with humans in non-structured environments. In this paper we propose a novel method for on-line adap- tation of robotic trajectories, where humans and robots are autonomous agents coupled through physical interaction, for example through manipulated object. Within the proposed framework, the robot adapts to the human motion through the sensory feedback by taking into account the Fitts' law where the user specific behavior is estimated using a recursive least square updates. The movement trajectories are represented by the Dynamic Movement Primitives, where the adaptation relies on the Iterative Learning Controller framework. The proposed approach was evaluated by a cooperative human robot arm- reaching task on a plane. We tested the accuracy and efficiency of the proposed method, showed its relevance and demonstrated that the proposed approach fully adapts to the human motor control and maintains the desired accuracy of the movement.
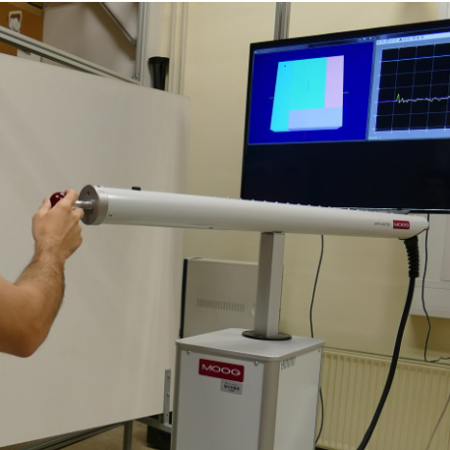
Peternel, Luka; Oztop, Erhan; Babič, Jan
A shared control method for online human-in-the-loop robot learning based on Locally Weighted Regression Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3900–3906, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Peternel2016,
title = {A shared control method for online human-in-the-loop robot learning based on Locally Weighted Regression},
author = {Luka Peternel and Erhan Oztop and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759574/},
doi = {10.1109/IROS.2016.7759574},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-01-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {3900--3906},
publisher = {IEEE},
address = {Daejeon},
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.
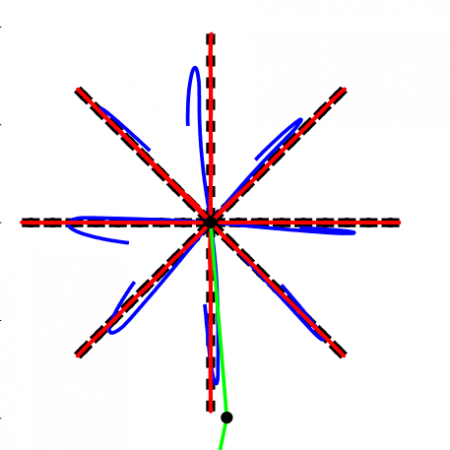
Petrič, Tadej; Ude, Aleš; Ijspeert, Auke J
Autonomous Learning of Internal Dynamic Models for Reaching Tasks Book Section
In: Borangiu, Theodor (Ed.): Advances in Intelligent Systems and Computing, vol. 371, pp. 439–447, Springer, 2016, ISSN: 21945357.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Machine Learning | Links:
@incollection{Petric2016c,
title = {Autonomous Learning of Internal Dynamic Models for Reaching Tasks},
author = {Tadej Petri\v{c} and Ale\v{s} Ude and Auke J Ijspeert},
editor = {Theodor Borangiu},
url = {http://link.springer.com/10.1007/978-3-319-21290-6_44},
doi = {10.1007/978-3-319-21290-6_44},
issn = {21945357},
year = {2016},
date = {2016-01-01},
booktitle = {Advances in Intelligent Systems and Computing},
volume = {371},
pages = {439--447},
publisher = {Springer},
abstract = {The paper addresses the problem of learning internal task-specific dynamic models for a reaching task. Using task-specific dynamic models is crucial for achieving both high tracking accuracy and compliant behaviour, which improves safety concerns while working in unstructured environment or with humans. The proposed approach uses programming by demonstration to learn new task-related movements encoded as Compliant Movement Primitives (CMPs). CMPs are a combination of position trajectories encoded in a form of Dynamic Movement Primitives (DMPs) and corresponding task-specific Torque Primitives (TPs) encoded as a linear combination of kernel functions. Unlike the DMPs, TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability we propose a novel method which autonomously learns task-specific TPs, based on a given kinematic trajectory in DMPs.},
keywords = {Compliance and Impedance Control, Human Motor Control, Machine Learning},
pubstate = {published},
tppubtype = {incollection}
}
The paper addresses the problem of learning internal task-specific dynamic models for a reaching task. Using task-specific dynamic models is crucial for achieving both high tracking accuracy and compliant behaviour, which improves safety concerns while working in unstructured environment or with humans. The proposed approach uses programming by demonstration to learn new task-related movements encoded as Compliant Movement Primitives (CMPs). CMPs are a combination of position trajectories encoded in a form of Dynamic Movement Primitives (DMPs) and corresponding task-specific Torque Primitives (TPs) encoded as a linear combination of kernel functions. Unlike the DMPs, TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability we propose a novel method which autonomously learns task-specific TPs, based on a given kinematic trajectory in DMPs.
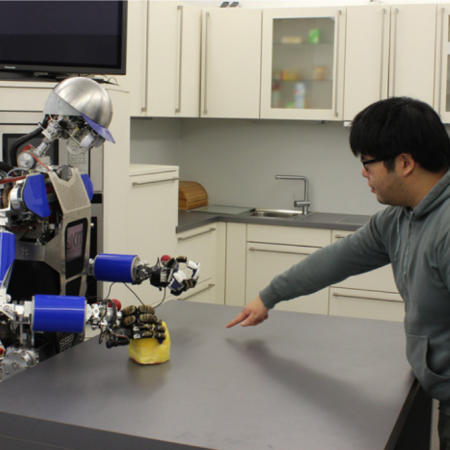
Gams, Andrej; Petrič, Tadej; Do, Martin; Nemec, Bojan; Morimoto, Jun; Asfour, Tamim; Ude, Aleš
Adaptation and coaching of periodic motion primitives through physical and visual interaction Journal Article
In: Robotics and Autonomous Systems, vol. 75, pp. 340–351, 2016, ISSN: 09218890.
Abstract | BibTeX | Tags: Dynamic Motion, Force Control | Links:
@article{Gams2016,
title = {Adaptation and coaching of periodic motion primitives through physical and visual interaction},
author = {Andrej Gams and Tadej Petri\v{c} and Martin Do and Bojan Nemec and Jun Morimoto and Tamim Asfour and Ale\v{s} Ude},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889015001992},
doi = {10.1016/j.robot.2015.09.011},
issn = {09218890},
year = {2016},
date = {2016-01-01},
journal = {Robotics and Autonomous Systems},
volume = {75},
pages = {340--351},
publisher = {Elsevier B.V.},
abstract = {In this paper we propose and evaluate a control system to (1) learn and (2) adapt robot motion for continuous non-rigid contact with the environment. We present the approach in the context of wiping surfaces with robots. Our approach is based on learning by demonstration. First an initial periodic motion, covering the essence of the wiping task, is transferred from a human to a robot. The system extracts and learns one period of motion. Once the user/demonstrator is content with the motion, the robot seeks and establishes contact with a given surface, maintaining a predefined force of contact through force feedback. The shape of the surface is encoded for the complete period of motion, but the robot can adapt to a different surface, perturbations or obstacles. The novelty stems from the fact that the feedforward component is learned and encoded in a dynamic movement primitive. By using the feedforward component, the feedback component is greatly reduced if not completely canceled. Finally, if the user is not satisfied with the periodic pattern, he/she can change parts of motion through predefined gestures or through physical contact in a manner of a tutor or a coach. The complete system thus allows not only a transfer of motion, but a transfer of motion with matching correspondences, i.e. wiping motion is constrained to maintain physical contact with the surface to be wiped. The interface for both learning and adaptation is simple and intuitive and allows for fast and reliable knowledge transfer to the robot. Simulated and real world results in the application domain of wiping a surface are presented on three different robotic platforms. Results of the three robotic platforms, namely a 7 degree-of-freedom Kuka LWR-4 robot, the ARMAR-IIIa humanoid platform and the Sarcos CB-i humanoid robot, depict different methods of adaptation to the environment and coaching.},
keywords = {Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose and evaluate a control system to (1) learn and (2) adapt robot motion for continuous non-rigid contact with the environment. We present the approach in the context of wiping surfaces with robots. Our approach is based on learning by demonstration. First an initial periodic motion, covering the essence of the wiping task, is transferred from a human to a robot. The system extracts and learns one period of motion. Once the user/demonstrator is content with the motion, the robot seeks and establishes contact with a given surface, maintaining a predefined force of contact through force feedback. The shape of the surface is encoded for the complete period of motion, but the robot can adapt to a different surface, perturbations or obstacles. The novelty stems from the fact that the feedforward component is learned and encoded in a dynamic movement primitive. By using the feedforward component, the feedback component is greatly reduced if not completely canceled. Finally, if the user is not satisfied with the periodic pattern, he/she can change parts of motion through predefined gestures or through physical contact in a manner of a tutor or a coach. The complete system thus allows not only a transfer of motion, but a transfer of motion with matching correspondences, i.e. wiping motion is constrained to maintain physical contact with the surface to be wiped. The interface for both learning and adaptation is simple and intuitive and allows for fast and reliable knowledge transfer to the robot. Simulated and real world results in the application domain of wiping a surface are presented on three different robotic platforms. Results of the three robotic platforms, namely a 7 degree-of-freedom Kuka LWR-4 robot, the ARMAR-IIIa humanoid platform and the Sarcos CB-i humanoid robot, depict different methods of adaptation to the environment and coaching.
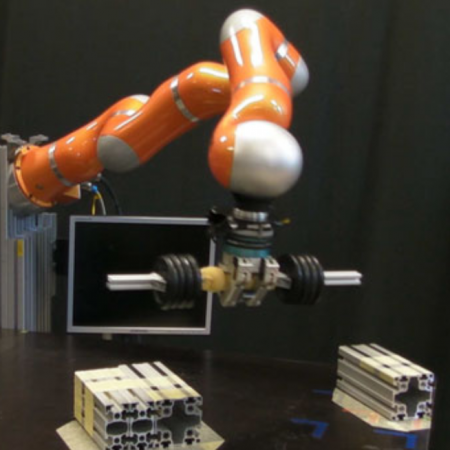
Deniša, Miha; Gams, Andrej; Ude, Aleš; Petrič, Tadej
Learning Compliant Movement Primitives Through Demonstration and Statistical Generalization Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 21, no. 5, pp. 2581–2594, 2016, ISSN: 1083-4435.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Machine Learning | Links:
@article{Denisa2016,
title = {Learning Compliant Movement Primitives Through Demonstration and Statistical Generalization},
author = {Miha Deni\v{s}a and Andrej Gams and Ale\v{s} Ude and Tadej Petri\v{c}},
url = {http://ieeexplore.ieee.org/document/7360201/},
doi = {10.1109/TMECH.2015.2510165},
issn = {1083-4435},
year = {2016},
date = {2016-01-01},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {21},
number = {5},
pages = {2581--2594},
abstract = {In this paper, we address the problem of simultaneously achieving low trajectory tracking errors and compliant control without using explicit mathematical models of task dynamics. To achieve this goal, we propose a new movement representation called compliant movement primitives (CMPs), which encodes position trajectory and associated torque profiles and can be learned from a single user demonstration. With the proposed control framework, the robot can remain compliant and consequently safe for humans sharing its workspace, even if high trajectory tracking accuracy is required. We developed a statistical learning approach that can use a database of existing CMPs and compute new ones, adapted for novel task variations. The proposed approach was evaluated on a Kuka LWR-4 robot performing 1) a discrete pick-and-place task with objects of varying weight and 2) a periodic handle turning operation. The evaluation of the discrete task showed a 15-fold decrease of the tracking error while exhibiting compliant behavior compared to the standard feedback control approach. It also indicated no significant rise in the tracking error while using generalized primitives computed by the statistical learning method. With respect to unforeseen collisions, the proposed approach resulted in a 75% drop of contact forces compared to standard feedback control. The periodic task demonstrated on-line use of the proposed approach to accomplish a task of handle turning.},
keywords = {Compliance and Impedance Control, Machine Learning},
pubstate = {published},
tppubtype = {article}
}
In this paper, we address the problem of simultaneously achieving low trajectory tracking errors and compliant control without using explicit mathematical models of task dynamics. To achieve this goal, we propose a new movement representation called compliant movement primitives (CMPs), which encodes position trajectory and associated torque profiles and can be learned from a single user demonstration. With the proposed control framework, the robot can remain compliant and consequently safe for humans sharing its workspace, even if high trajectory tracking accuracy is required. We developed a statistical learning approach that can use a database of existing CMPs and compute new ones, adapted for novel task variations. The proposed approach was evaluated on a Kuka LWR-4 robot performing 1) a discrete pick-and-place task with objects of varying weight and 2) a periodic handle turning operation. The evaluation of the discrete task showed a 15-fold decrease of the tracking error while exhibiting compliant behavior compared to the standard feedback control approach. It also indicated no significant rise in the tracking error while using generalized primitives computed by the statistical learning method. With respect to unforeseen collisions, the proposed approach resulted in a 75% drop of contact forces compared to standard feedback control. The periodic task demonstrated on-line use of the proposed approach to accomplish a task of handle turning.
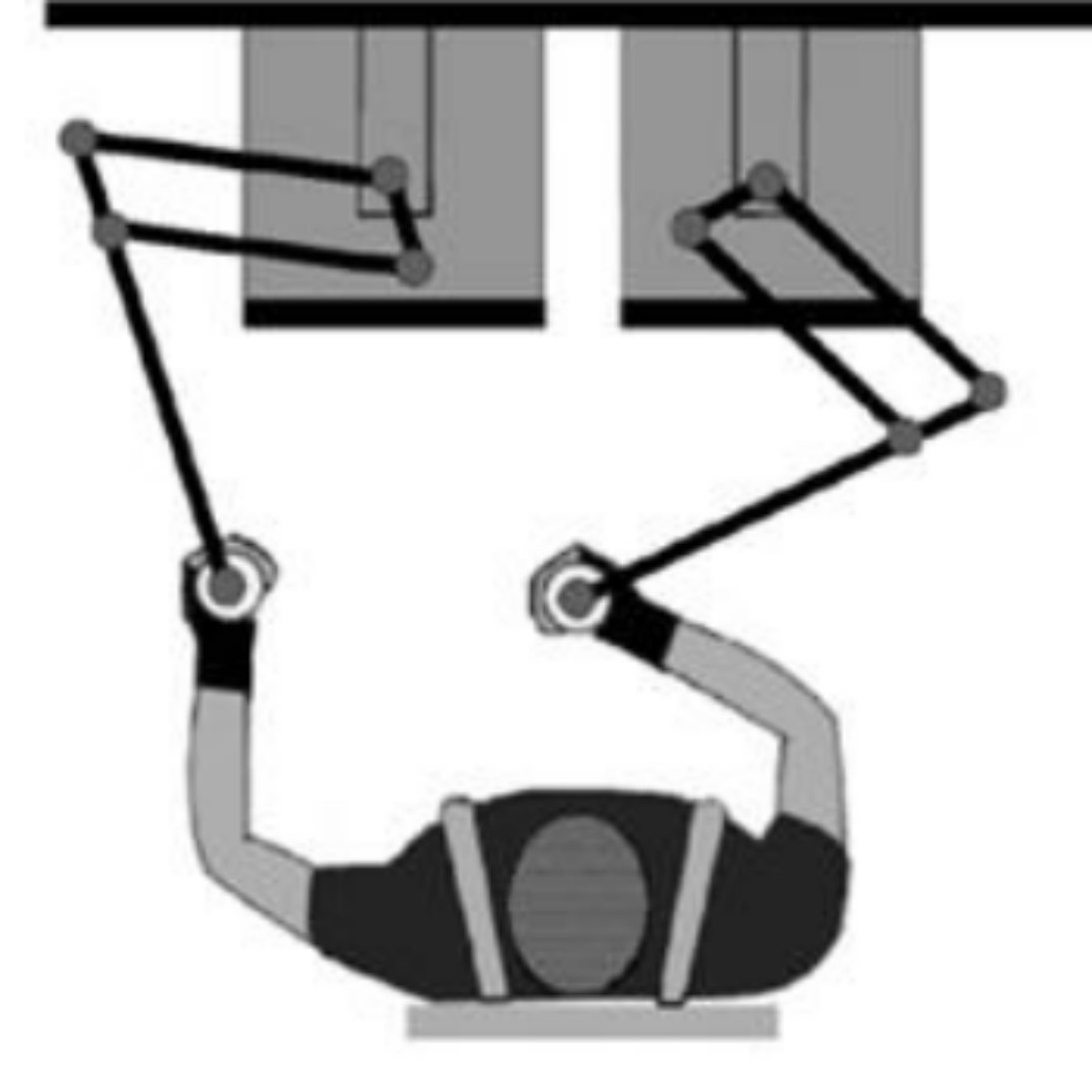
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Morasso, Pietro; Zenzeri, Jacopo
Transferring knowledge during dyadic interaction: The role of the expert in the learning process Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2016-Octob, pp. 2149-2152, 2016, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2016g,
title = {Transferring knowledge during dyadic interaction: The role of the expert in the learning process},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7591154},
doi = {10.1109/EMBC.2016.7591154},
issn = {1557170X},
year = {2016},
date = {2016-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2016-Octob},
pages = {2149-2152},
abstract = {Physical interaction between man and machines is increasing the interest of the research as well as the industrial community. It is known that physical coupling between active persons can be beneficial and increase the performance of the dyad compared to an individual. However, the factors that may result in performance benefits are still poorly understood. The aim of this work is to investigate how the different initial skill levels of the interacting partners influence the learning of a stabilization task. Twelve subjects, divided in two groups, trained in couples in a joint stabilization task. In the first group the couples were composed of two naive, while in the second a naive was trained together with an expert. Results show that training with an expert results in the greatest performance in the joint task. However, this benefit is not transferred to the individual when performing the same task bimanually.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Physical interaction between man and machines is increasing the interest of the research as well as the industrial community. It is known that physical coupling between active persons can be beneficial and increase the performance of the dyad compared to an individual. However, the factors that may result in performance benefits are still poorly understood. The aim of this work is to investigate how the different initial skill levels of the interacting partners influence the learning of a stabilization task. Twelve subjects, divided in two groups, trained in couples in a joint stabilization task. In the first group the couples were composed of two naive, while in the second a naive was trained together with an expert. Results show that training with an expert results in the greatest performance in the joint task. However, this benefit is not transferred to the individual when performing the same task bimanually.
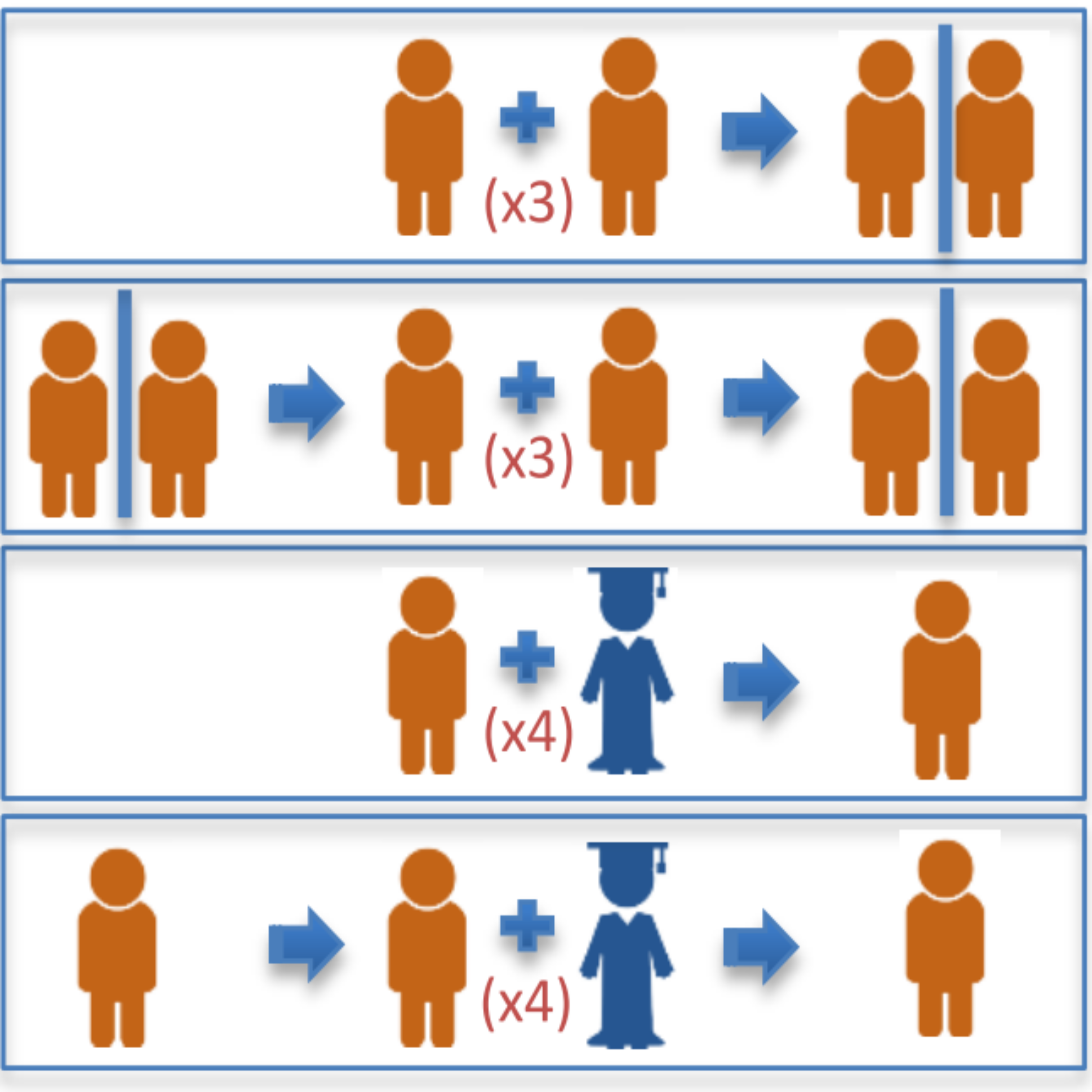
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Skill transfer and generalization after robot - mediated dyadic training Journal Article
In: Human Friendly Robotics, no. Human - Robot Interaction, pp. 1-6, 2016.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning
@article{Avila-Mireles2016h,
title = {Skill transfer and generalization after robot - mediated dyadic training},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
year = {2016},
date = {2016-01-01},
journal = {Human Friendly Robotics},
number = {Human - Robot Interaction},
pages = {1-6},
abstract = {Several studies have investigated how the interaction between two people or between a person and a robot can be harnessed to improve the skills of the partners. Indeed, solving a task as a dyad can lead the individual to perform better than by himself. The goal of this work is to investigate how the skill level of the partner and different interactive conditions affect learning of a novel task. In particular we considered the case of partners with different initial skill level (na\"{i}ve or experts) and the influence of prior individual practice. Twenty two subjects trained in a joint stabilization task for 4 days. On the last day we tested their ability to perform the same task individually. The results show that training with a skilled partner, despite bringing to a faster learning in the joint task, does not facilitate skill transfer in the absence of individual prior practice. This suggests that the physical coupling with an expert partner may interfere with learning due to the formation of a non-veridical internal representation of the task},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Several studies have investigated how the interaction between two people or between a person and a robot can be harnessed to improve the skills of the partners. Indeed, solving a task as a dyad can lead the individual to perform better than by himself. The goal of this work is to investigate how the skill level of the partner and different interactive conditions affect learning of a novel task. In particular we considered the case of partners with different initial skill level (naïve or experts) and the influence of prior individual practice. Twenty two subjects trained in a joint stabilization task for 4 days. On the last day we tested their ability to perform the same task individually. The results show that training with a skilled partner, despite bringing to a faster learning in the joint task, does not facilitate skill transfer in the absence of individual prior practice. This suggests that the physical coupling with an expert partner may interfere with learning due to the formation of a non-veridical internal representation of the task
2015
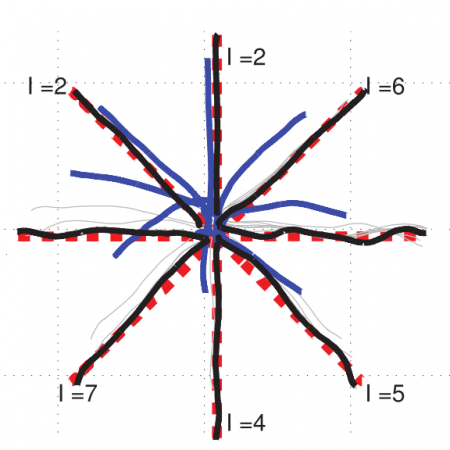
Petrič, Tadej; Colasanto, Luca; Gams, Andrej; Ude, Aleš; Ijspeert, Auke J
Bio-inspired learning and database expansion of Compliant Movement Primitives Proceedings Article
In: 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), pp. 346–351, IEEE, Seoul, 2015, ISSN: 21640580.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics, Machine Learning | Links:
@inproceedings{Petric2015,
title = {Bio-inspired learning and database expansion of Compliant Movement Primitives},
author = {Tadej Petri\v{c} and Luca Colasanto and Andrej Gams and Ale\v{s} Ude and Auke J Ijspeert},
url = {http://ieeexplore.ieee.org/document/7363573/},
doi = {10.1109/HUMANOIDS.2015.7363573},
issn = {21640580},
year = {2015},
date = {2015-11-01},
booktitle = {2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids)},
pages = {346--351},
publisher = {IEEE},
address = {Seoul},
abstract = {The paper addresses the problem of learning torque primitives - the torques associated to a kinematic trajectory, and required in order to accurately track this kinematic trajectory. Learning torque primitives, which can be interpreted as internal dynamic models, is crucial to achieve at the same time (1) high tracking accuracy and (2) compliant behaviour. The latter improves the safety concerns of working in unstructured environments or with humans. In the proposed approach, first learning by demonstration is used to obtain the kinematic trajectories, which are encoded in the form of Dynamic Movement Primitives (DMPs). These are combined with the corresponding task-specific Torque Primitives (TPs), and together they form new task-related compliant movements, denoted as Compliant Movement Primitives (CMPs). Unlike the DMPs, the TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability, we propose a novel method which can autonomously learn task-specific Torque Primitives (TPs) associated to given kinematic trajectories in the form of DMPs. The proposed algorithm is completely autonomous, and can be used to rapidly generate and expand the database of CMPs motions. Since the CMPs are parameterized, statistical generalisation can be used to obtain an initial TP estimate of a new CMP motion. Thereby, the learning rate of new CMPs can be significantly improved. The evaluation of the proposed approach on a humanoid robot CoMan performing reaching task shows fast TP acquisition and accurate generalization estimates in real-world scenarios.},
keywords = {Compliance and Impedance Control, Kinematics, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper addresses the problem of learning torque primitives - the torques associated to a kinematic trajectory, and required in order to accurately track this kinematic trajectory. Learning torque primitives, which can be interpreted as internal dynamic models, is crucial to achieve at the same time (1) high tracking accuracy and (2) compliant behaviour. The latter improves the safety concerns of working in unstructured environments or with humans. In the proposed approach, first learning by demonstration is used to obtain the kinematic trajectories, which are encoded in the form of Dynamic Movement Primitives (DMPs). These are combined with the corresponding task-specific Torque Primitives (TPs), and together they form new task-related compliant movements, denoted as Compliant Movement Primitives (CMPs). Unlike the DMPs, the TPs cannot be directly acquired from user demonstrations. Inspired by the human sensorimotor learning ability, we propose a novel method which can autonomously learn task-specific Torque Primitives (TPs) associated to given kinematic trajectories in the form of DMPs. The proposed algorithm is completely autonomous, and can be used to rapidly generate and expand the database of CMPs motions. Since the CMPs are parameterized, statistical generalisation can be used to obtain an initial TP estimate of a new CMP motion. Thereby, the learning rate of new CMPs can be significantly improved. The evaluation of the proposed approach on a humanoid robot CoMan performing reaching task shows fast TP acquisition and accurate generalization estimates in real-world scenarios.
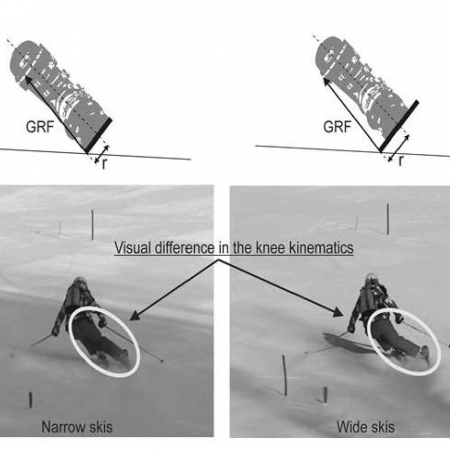
Zorko, Martin; Nemec, Bojan; Babič, Jan; Lešnik, Blaž; Supej, Matej
The Waist Width of Skis Influences the Kinematics of the Knee Joint in Alpine Skiing. Journal Article
In: Journal of sports science & medicine, vol. 14, no. 3, pp. 606–19, 2015, ISSN: 1303-2968.
Abstract | BibTeX | Tags: Human Motor Control, Sport | Links:
@article{Zorko2015a,
title = {The Waist Width of Skis Influences the Kinematics of the Knee Joint in Alpine Skiing.},
author = {Martin Zorko and Bojan Nemec and Jan Babi\v{c} and Bla\v{z} Le\v{s}nik and Matej Supej},
url = {https://www.jssm.org/hfabst.php?id=jssm-14-606.xml},
issn = {1303-2968},
year = {2015},
date = {2015-01-01},
journal = {Journal of sports science \& medicine},
volume = {14},
number = {3},
pages = {606--19},
abstract = {Recently alpine skis with a wider waist width, which medially shifts the contact between the ski edge and the snow while turning, have appeared on the market. The aim of this study was to determine the knee joint kinematics during turning while using skis of different waist widths (65mm, 88mm, 110mm). Six highly skilled skiers performed ten turns on a predefined course (similar to a giant slalom course). The relation of femur and tibia in the sagital, frontal and coronal planes was captured by using an inertial motion capture suit, and Global Navigation Satellite System was used to determine the skiers' trajectories. With respect of the outer ski the knee joint flexion, internal rotation and abduction significantly decreased with the increase of the ski waist width for the greatest part of the ski turn. The greatest abduction with the narrow ski and the greatest external rotation (lowest internal rotation) with the wide ski are probably the reflection of two different strategies of coping the biomechanical requirements in the ski turn. These changes in knee kinematics were most probably due to an active adaptation of the skier to the changed biomechanical conditions using wider skis. The results indicated that using skis with large waist widths on hard, frozen surfaces could bring the knee joint unfavorably closer to the end of the range of motion in transversal and frontal planes as well as potentially increasing the risk of degenerative knee injuries. Key pointsThe change in the skis' waist width caused a change in the knee joint movement strategies, which had a tendency to adapt the skier to different biomechanical conditions.The use of wider skis or, in particular, skis with a large waist width, on a hard or frozen surface, could unfavourably bring the knee joint closer to the end of range of motion in transversal and frontal planes as well as may potentially increase the risk of degenerative knee injuries.The overall results of the abduction and internal rotation in respect to turn radii and ground reaction forces indicated that the knee joint movements are likely one of the key points in alpine skiing techniques. However, the skiing equipment used can still significantly influence the movement strategy.},
keywords = {Human Motor Control, Sport},
pubstate = {published},
tppubtype = {article}
}
Recently alpine skis with a wider waist width, which medially shifts the contact between the ski edge and the snow while turning, have appeared on the market. The aim of this study was to determine the knee joint kinematics during turning while using skis of different waist widths (65mm, 88mm, 110mm). Six highly skilled skiers performed ten turns on a predefined course (similar to a giant slalom course). The relation of femur and tibia in the sagital, frontal and coronal planes was captured by using an inertial motion capture suit, and Global Navigation Satellite System was used to determine the skiers' trajectories. With respect of the outer ski the knee joint flexion, internal rotation and abduction significantly decreased with the increase of the ski waist width for the greatest part of the ski turn. The greatest abduction with the narrow ski and the greatest external rotation (lowest internal rotation) with the wide ski are probably the reflection of two different strategies of coping the biomechanical requirements in the ski turn. These changes in knee kinematics were most probably due to an active adaptation of the skier to the changed biomechanical conditions using wider skis. The results indicated that using skis with large waist widths on hard, frozen surfaces could bring the knee joint unfavorably closer to the end of the range of motion in transversal and frontal planes as well as potentially increasing the risk of degenerative knee injuries. Key pointsThe change in the skis' waist width caused a change in the knee joint movement strategies, which had a tendency to adapt the skier to different biomechanical conditions.The use of wider skis or, in particular, skis with a large waist width, on a hard or frozen surface, could unfavourably bring the knee joint closer to the end of range of motion in transversal and frontal planes as well as may potentially increase the risk of degenerative knee injuries.The overall results of the abduction and internal rotation in respect to turn radii and ground reaction forces indicated that the knee joint movements are likely one of the key points in alpine skiing techniques. However, the skiing equipment used can still significantly influence the movement strategy.

Peternel, Luka; Petrič, Tadej; Babič, Jan
Human-in-the-loop approach for teaching robot assembly tasks using impedance control interface Proceedings Article
In: 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 1497–1502, IEEE, Seattle, 2015, ISSN: 10504729.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Peternel2015a,
title = {Human-in-the-loop approach for teaching robot assembly tasks using impedance control interface},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7139387/},
doi = {10.1109/ICRA.2015.7139387},
issn = {10504729},
year = {2015},
date = {2015-01-01},
booktitle = {2015 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1497--1502},
publisher = {IEEE},
address = {Seattle},
abstract = {In this paper we propose a human-in-the-loop approach for teaching robots how to solve part assembly tasks. In the proposed setup the human tutor controls the robot through a haptic interface and a hand-held impedance control interface. The impedance control interface is based on a linear spring-return potentiometer that maps the button position to the robot arm stiffness. This setup allows the tutor to modulate the robot compliance based on the given task requirements. The demonstrated motion and stiffness trajectories are encoded using Dynamical Movement Primitives and learnt using Locally Weight Regression. To validate the proposed approach we performed experiments using Kuka Light Weight Robot and HapticMaster robot. The task of the experiment was to teach the robot how to perform an assembly task involving sliding a bolt fitting inside a groove in order to mount two parts together. Different stiffness was required in different stages of the task execution to accommodate the interaction of the robot with the environment and possible human-robot cooperation.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a human-in-the-loop approach for teaching robots how to solve part assembly tasks. In the proposed setup the human tutor controls the robot through a haptic interface and a hand-held impedance control interface. The impedance control interface is based on a linear spring-return potentiometer that maps the button position to the robot arm stiffness. This setup allows the tutor to modulate the robot compliance based on the given task requirements. The demonstrated motion and stiffness trajectories are encoded using Dynamical Movement Primitives and learnt using Locally Weight Regression. To validate the proposed approach we performed experiments using Kuka Light Weight Robot and HapticMaster robot. The task of the experiment was to teach the robot how to perform an assembly task involving sliding a bolt fitting inside a groove in order to mount two parts together. Different stiffness was required in different stages of the task execution to accommodate the interaction of the robot with the environment and possible human-robot cooperation.

Gorjanc, Jurij; Morrison, Shawnda; McDonnell, Adam; Babič, Jan; Mekjavić, Igor B
Koroška 8000: digit responses to cold stress following himalayan expedition to broadpeak, Pakistan (8051 m) Journal Article
In: Extreme Physiology & Medicine, vol. 4, no. Suppl 1, pp. A43, 2015, ISSN: 2046-7648.
Abstract | BibTeX | Tags: Sport | Links:
@article{Gorjanc2015,
title = {Koro\v{s}ka 8000: digit responses to cold stress following himalayan expedition to broadpeak, Pakistan (8051 m)},
author = {Jurij Gorjanc and Shawnda Morrison and Adam McDonnell and Jan Babi\v{c} and Igor B Mekjavi\'{c}},
url = {http://extremephysiolmed.biomedcentral.com/articles/10.1186/2046-7648-4-S1-A43},
doi = {10.1186/2046-7648-4-S1-A43},
issn = {2046-7648},
year = {2015},
date = {2015-01-01},
journal = {Extreme Physiology \& Medicine},
volume = {4},
number = {Suppl 1},
pages = {A43},
abstract = {We investigated the effects chronic hypobaric hypoxia exposure would have on alpinists' physiological adapta- tions, including: aerobic fitness, body composition, haema- tological variables and digit perfusion responses to cold stress, performed before and immediately after a 35 day high altitude climbing expedition.},
keywords = {Sport},
pubstate = {published},
tppubtype = {article}
}
We investigated the effects chronic hypobaric hypoxia exposure would have on alpinists' physiological adapta- tions, including: aerobic fitness, body composition, haema- tological variables and digit perfusion responses to cold stress, performed before and immediately after a 35 day high altitude climbing expedition.
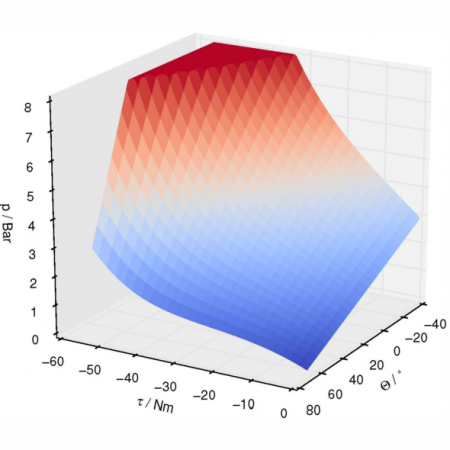
Peternel, Luka; Ugurlu, Barkan; Babič, Jan; Morimoto, Jun
Assessments on the improved modelling for pneumatic artificial muscle actuators Proceedings Article
In: 2015 International Conference on Advanced Robotics (ICAR), pp. 34–39, IEEE, Istanbul, 2015, ISBN: 978-1-4673-7509-2.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Muscle Mechanics | Links:
@inproceedings{Peternel2015b,
title = {Assessments on the improved modelling for pneumatic artificial muscle actuators},
author = {Luka Peternel and Barkan Ugurlu and Jan Babi\v{c} and Jun Morimoto},
url = {http://ieeexplore.ieee.org/document/7251430/},
doi = {10.1109/ICAR.2015.7251430},
isbn = {978-1-4673-7509-2},
year = {2015},
date = {2015-01-01},
booktitle = {2015 International Conference on Advanced Robotics (ICAR)},
pages = {34--39},
publisher = {IEEE},
address = {Istanbul},
abstract = {In this paper, we present an analysis regarding the pneumatic air muscle modelling, with a particular emphasis on the exoskeleton robot control. We propose two calibration approaches for obtaining the model identification data. We used the measurement data acquired from the proposed approaches to identify different mathematical models of pneumatic muscles. These models specified the necessary muscle control pressure for the desired muscle force at a given muscle length value. We compared the performance between the different types of models identified by either of the calibration method. The identified model with the lowest validation error was implemented in pneumatic muscle control for an elbow exoskeleton system. As a result, the system exhibited satisfactory torque and position control tasks, adequately validating the proposed approach.},
keywords = {Exoskeleton Design and Control, Muscle Mechanics},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper, we present an analysis regarding the pneumatic air muscle modelling, with a particular emphasis on the exoskeleton robot control. We propose two calibration approaches for obtaining the model identification data. We used the measurement data acquired from the proposed approaches to identify different mathematical models of pneumatic muscles. These models specified the necessary muscle control pressure for the desired muscle force at a given muscle length value. We compared the performance between the different types of models identified by either of the calibration method. The identified model with the lowest validation error was implemented in pneumatic muscle control for an elbow exoskeleton system. As a result, the system exhibited satisfactory torque and position control tasks, adequately validating the proposed approach.
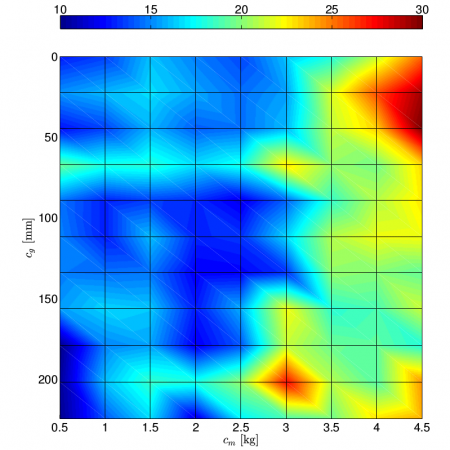
Deniša, Miha; Gams, Andrej; Ude, Aleš; Petrič, Tadej
Generalization of discrete Compliant Movement Primitives Proceedings Article
In: 2015 International Conference on Advanced Robotics (ICAR), pp. 565–572, IEEE, Istanbul, 2015, ISBN: 978-1-4673-7509-2.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Optimal Control | Links:
@inproceedings{Denisa2015,
title = {Generalization of discrete Compliant Movement Primitives},
author = {Miha Deni\v{s}a and Andrej Gams and Ale\v{s} Ude and Tadej Petri\v{c}},
url = {http://ieeexplore.ieee.org/document/7251512/},
doi = {10.1109/ICAR.2015.7251512},
isbn = {978-1-4673-7509-2},
year = {2015},
date = {2015-01-01},
booktitle = {2015 International Conference on Advanced Robotics (ICAR)},
number = {1},
pages = {565--572},
publisher = {IEEE},
address = {Istanbul},
abstract = {This paper addresses the problem of achieving high robot compliance while maintaining low tracking error without the use of dynamical models. The proposed approach uses programing by demonstration to learn new task related compliant movement. The presented Compliant Movement Primitives are a combination of 1) position trajectories, gained through human demonstration and encoded as Dynamical Movement Primitives and 2) corresponding torque trajectories encoded as a linear combination of radial basis functions. A set of example Compliant Movement Primitives is used with statistical generalization in order to execute previously unexplored tasks inside the training space. The proposed control approach and generalization was evaluated with a discrete pick-and-place task on a Kuka LWR robot. The evaluation showed a major decrease in tracking error compared to a classic feedback approach and no significant rise in tracking error while using generalized Compliant Movement Primitives.},
keywords = {Compliance and Impedance Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper addresses the problem of achieving high robot compliance while maintaining low tracking error without the use of dynamical models. The proposed approach uses programing by demonstration to learn new task related compliant movement. The presented Compliant Movement Primitives are a combination of 1) position trajectories, gained through human demonstration and encoded as Dynamical Movement Primitives and 2) corresponding torque trajectories encoded as a linear combination of radial basis functions. A set of example Compliant Movement Primitives is used with statistical generalization in order to execute previously unexplored tasks inside the training space. The proposed control approach and generalization was evaluated with a discrete pick-and-place task on a Kuka LWR robot. The evaluation showed a major decrease in tracking error compared to a classic feedback approach and no significant rise in tracking error while using generalized Compliant Movement Primitives.
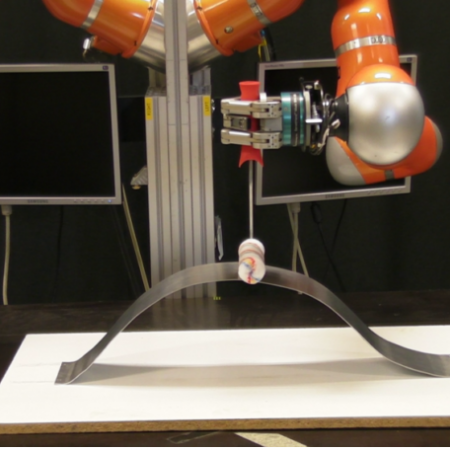
Nemec, Bojan; Petrič, Tadej; Ude, Aleš
Force adaptation with recursive regression Iterative Learning Controller Proceedings Article
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2835–2841, IEEE, Hamburg, 2015, ISBN: 978-1-4799-9994-1.
Abstract | BibTeX | Tags: Force Control, Machine Learning | Links:
@inproceedings{Nemec2015,
title = {Force adaptation with recursive regression Iterative Learning Controller},
author = {Bojan Nemec and Tadej Petri\v{c} and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/7353767/},
doi = {10.1109/IROS.2015.7353767},
isbn = {978-1-4799-9994-1},
year = {2015},
date = {2015-01-01},
booktitle = {2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {2835--2841},
publisher = {IEEE},
address = {Hamburg},
abstract = {In this paper we exploit Iterative Learning Controllers (ILC) schemes in force adaptation tasks. We propose to encode the control signal with Radial Basis Functions (RBF), which enhances the robustness of the ILC scheme and allows to vary the execution speed of the learned motion. For that a novel control scheme is proposed, which updates the feedforward compensation signals based on current iteration cycle signals in contrast to the standard ILC, which uses signals from the previous iteration cycle. This reduces the computational burden and enhances the adaptation speed. Stability of the proposed control law is analysed and discussed. The proposed approach is evaluated in simulation and on a Kuka Light Weight Robot Arm where the task was to perform force-based surface following with both discrete and periodic movements.},
keywords = {Force Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we exploit Iterative Learning Controllers (ILC) schemes in force adaptation tasks. We propose to encode the control signal with Radial Basis Functions (RBF), which enhances the robustness of the ILC scheme and allows to vary the execution speed of the learned motion. For that a novel control scheme is proposed, which updates the feedforward compensation signals based on current iteration cycle signals in contrast to the standard ILC, which uses signals from the previous iteration cycle. This reduces the computational burden and enhances the adaptation speed. Stability of the proposed control law is analysed and discussed. The proposed approach is evaluated in simulation and on a Kuka Light Weight Robot Arm where the task was to perform force-based surface following with both discrete and periodic movements.
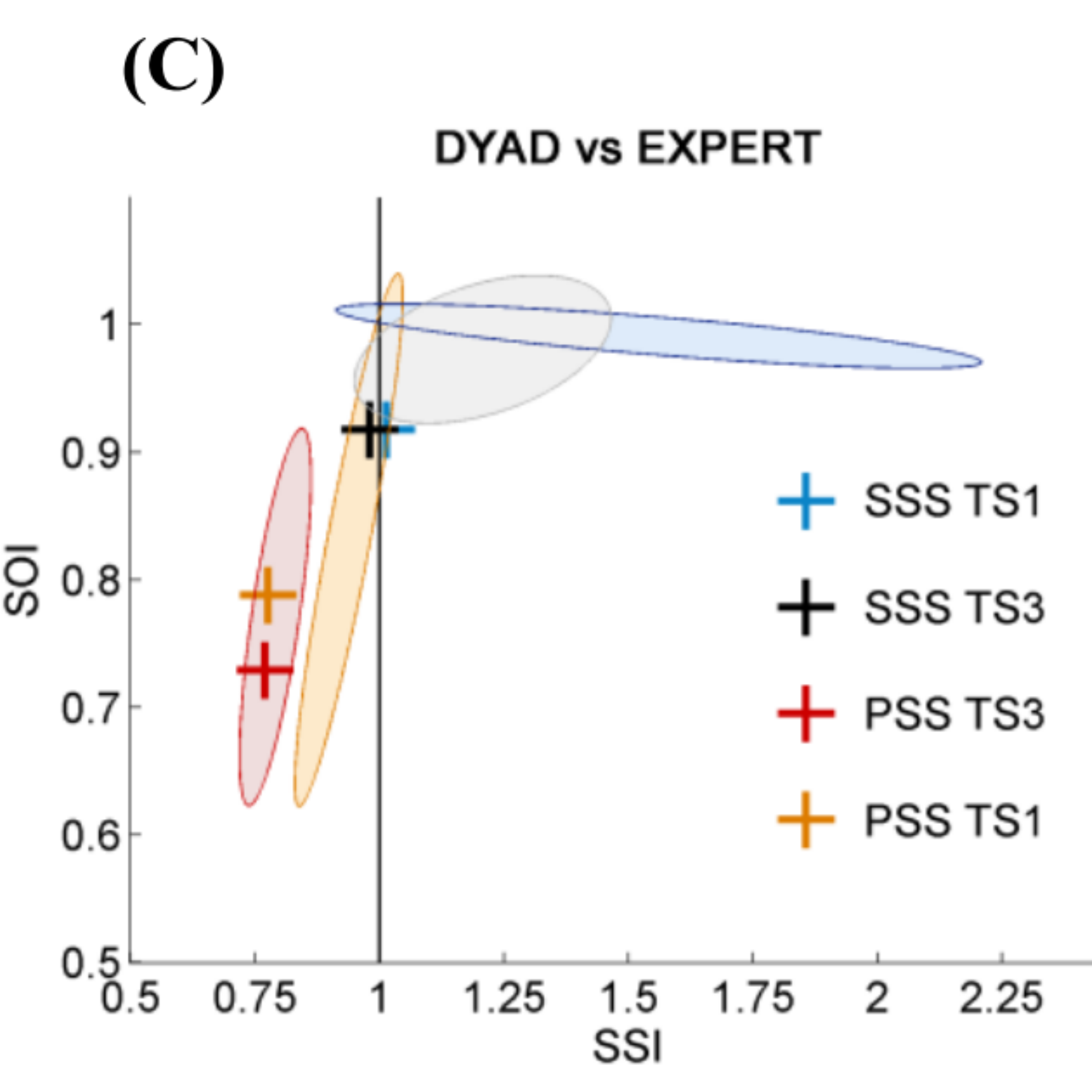
Santis, Dalia De; Avila-Mireles, Edwin Johnatan; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Dealing with instability in bimanual and collaborative tasks Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2015-Novem, no. i, pp. 1417-1420, 2015, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{DeSantis2015a,
title = {Dealing with instability in bimanual and collaborative tasks},
author = {Dalia {De Santis} and Edwin Johnatan Avila-Mireles and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7318635},
doi = {10.1109/EMBC.2015.7318635},
issn = {1557170X},
year = {2015},
date = {2015-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2015-Novem},
number = {i},
pages = {1417-1420},
publisher = {IEEE},
abstract = {In the context of unstable tasks, whenever the dynamics of the interaction are unknown, our ability to control an object depends on the predictability of the sensory feedback generated from the physical coupling at the interface with the object. In the case of physical human-human interaction, the haptic sensory feedback plays a primary role in the construction of a shared motor plan, being the channel for the mutual sharing of intentions. The present work addresses the issue of strategy selection in contexts in which instability is arising both from the environment, i.e. controlling a compliant object subject to nonlinear forces, and from the interaction with a partner, i.e. carrying out a bimanual balancing task in the presence of disturbing force-fields.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In the context of unstable tasks, whenever the dynamics of the interaction are unknown, our ability to control an object depends on the predictability of the sensory feedback generated from the physical coupling at the interface with the object. In the case of physical human-human interaction, the haptic sensory feedback plays a primary role in the construction of a shared motor plan, being the channel for the mutual sharing of intentions. The present work addresses the issue of strategy selection in contexts in which instability is arising both from the environment, i.e. controlling a compliant object subject to nonlinear forces, and from the interaction with a partner, i.e. carrying out a bimanual balancing task in the presence of disturbing force-fields.
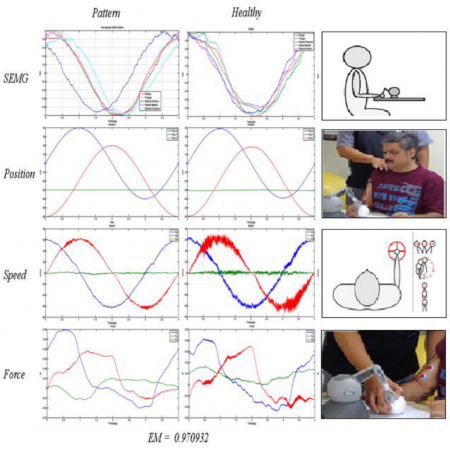
Avila-Mireles, Edwin Johnatan; Ruiz-sánchez, Francisco J
Haptically Induced EMG Patterns for Upper Limb Neuromuscular Evaluation Journal Article
In: Proceedings of 17th International Conference of the Engineering in Medicine and Biology Society, vol. 43, pp. 2012, 2015.
Abstract | BibTeX | Tags: Physical Human Robot Interaction, Sensorimotor Learning
@article{Avila-Mireles2015a,
title = {Haptically Induced EMG Patterns for Upper Limb Neuromuscular Evaluation},
author = {Edwin Johnatan Avila-Mireles and Francisco J Ruiz-s\'{a}nchez},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Proceedings of 17th International Conference of the Engineering in Medicine and Biology Society},
volume = {43},
pages = {2012},
abstract = {In this paper, we present the upper-limb sEMG signals induced by a kinesthetic stimulation, provided by a haptic device in a guiding mode, with cyclic movements on the transverse plane. We show the existence of common patterns of muscular activation in healthy volunteers describing the desired sequence of signals to produce an appropriated and coordinated movement. These patterns introduce physiological information about the etiology of the movement, and a mean to improve the assessment of the neuromuscular state in a patient.},
keywords = {Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In this paper, we present the upper-limb sEMG signals induced by a kinesthetic stimulation, provided by a haptic device in a guiding mode, with cyclic movements on the transverse plane. We show the existence of common patterns of muscular activation in healthy volunteers describing the desired sequence of signals to produce an appropriated and coordinated movement. These patterns introduce physiological information about the etiology of the movement, and a mean to improve the assessment of the neuromuscular state in a patient.
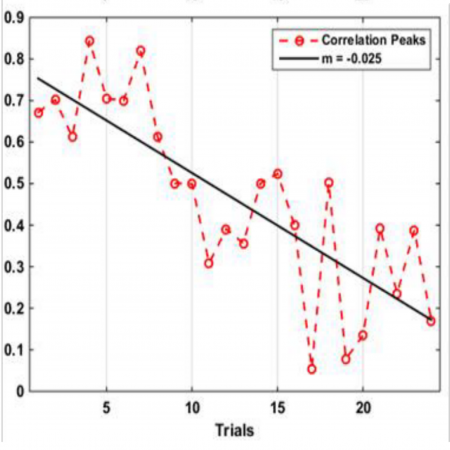
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Motor control strategies in the bimanual stabilization of an unstable virtual tool Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2015-Novem, pp. 3472-3475, 2015, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2015b,
title = {Motor control strategies in the bimanual stabilization of an unstable virtual tool},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7319140},
doi = {10.1109/EMBC.2015.7319140},
issn = {1557170X},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2015-Novem},
pages = {3472-3475},
abstract = {Previous works have shown that, when dealing with instabilities in a bimanual manipulation paradigm, humans modulate the stiffness of the arms according to feedforward or feedback mechanisms as a function of the dynamics of the task. The aim of this work is to complement these results getting insights on how the CNS controls the muscles to achieve the stabilization goal in the two aforementioned control strategies. Surface EMG was recorded from 13 muscles of each arm and trunk while three expert subjects performed bimanual balancing of a virtual underactuated tool immersed in an unstable force-field. Results suggest the existence of an intermittent muscle ensemble recruitment that follows two distinct activation patterns, namely synchronous co-contractions and independent activations. The observed EMG patterns were independent of the motor control strategy applied in the task. These findings therefore suggest the existence of separate control strategies for the tool stabilization and the control of hand movements at the muscular level during a bimanual postural task.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Previous works have shown that, when dealing with instabilities in a bimanual manipulation paradigm, humans modulate the stiffness of the arms according to feedforward or feedback mechanisms as a function of the dynamics of the task. The aim of this work is to complement these results getting insights on how the CNS controls the muscles to achieve the stabilization goal in the two aforementioned control strategies. Surface EMG was recorded from 13 muscles of each arm and trunk while three expert subjects performed bimanual balancing of a virtual underactuated tool immersed in an unstable force-field. Results suggest the existence of an intermittent muscle ensemble recruitment that follows two distinct activation patterns, namely synchronous co-contractions and independent activations. The observed EMG patterns were independent of the motor control strategy applied in the task. These findings therefore suggest the existence of separate control strategies for the tool stabilization and the control of hand movements at the muscular level during a bimanual postural task.
Avila-Mireles, Edwin Johnatan; Ruiz-Sánchez, Francisco J; García-Salazar, Octavio
EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation Proceedings Article
In: 2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2015, 2015.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@inproceedings{Avila-Mireles2015bb,
title = {EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation},
author = {Edwin Johnatan Avila-Mireles and Francisco J Ruiz-S\'{a}nchez and Octavio Garc\'{i}a-Salazar},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7357984},
doi = {10.1109/ICEEE.2015.7357984},
year = {2015},
date = {2015-01-01},
booktitle = {2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2015},
abstract = {Robotic devices have been used successfully in assisted rehabilitation to increase, in continuity and intensity, the effects of neuromuscular stimulation. However, information resulting from the Patient-Robot interaction is not yet analyzed for diagnosis purposes. The neuromuscular reaction to a controlled stimulation, measured in terms of physiologic and mechanic variables, can be used to establish a common causal relation in healthy people to be used as a reference to evaluate the state of a patient, and thus, reinforce or reconsider its treatment. In this paper, we analyze the upper limb EMG patterns induced kinesthetically by uniform and cyclic trajectories using a haptic interface, and we show the existence of common patterns in healthy volunteers and how these patterns together with the mechanical response, can be used as a reference in diagnosis by means of a Similitude Index; we describe the EMG signals considered in this work, the experimental conditions to induce their activation patterns, and we discuss about some experimental results obtained with healthy volunteers and stroke patients.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Robotic devices have been used successfully in assisted rehabilitation to increase, in continuity and intensity, the effects of neuromuscular stimulation. However, information resulting from the Patient-Robot interaction is not yet analyzed for diagnosis purposes. The neuromuscular reaction to a controlled stimulation, measured in terms of physiologic and mechanic variables, can be used to establish a common causal relation in healthy people to be used as a reference to evaluate the state of a patient, and thus, reinforce or reconsider its treatment. In this paper, we analyze the upper limb EMG patterns induced kinesthetically by uniform and cyclic trajectories using a haptic interface, and we show the existence of common patterns in healthy volunteers and how these patterns together with the mechanical response, can be used as a reference in diagnosis by means of a Similitude Index; we describe the EMG signals considered in this work, the experimental conditions to induce their activation patterns, and we discuss about some experimental results obtained with healthy volunteers and stroke patients.
2014
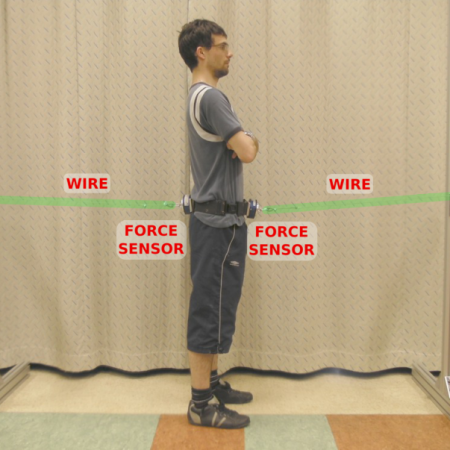
Peternel, Luka; Babič, Jan
Switchable task-priority framework for combining human-demonstrated and inverse kinematics tasks Proceedings Article
In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), pp. 542–547, IEEE, Bali, 2014, ISBN: 978-1-4799-7397-2.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Peternel2014a,
title = {Switchable task-priority framework for combining human-demonstrated and inverse kinematics tasks},
author = {Luka Peternel and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/7090387/},
doi = {10.1109/ROBIO.2014.7090387},
isbn = {978-1-4799-7397-2},
year = {2014},
date = {2014-12-01},
booktitle = {2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014)},
pages = {542--547},
publisher = {IEEE},
address = {Bali},
abstract = {We propose an approach that combines human demonstrated posture-control skill defined by the motion in the lower limb joints with an inverse kinematics solution of an arbitrary hand motion. The posture-control skill for humanoid robot was obtained through the human-in-the-loop teaching approach. The collected data during the teaching phase was used to approximate functional relation between the state of the robot's centre-of-pressure and the appropriate motion in the joints of the leg. The motion of the robot's hand was prescribed using the inverse kinematic solution. The posture-control skill and the motion of the hand were combined together using the task priority resolution strategy. We tested our approach with an experiment where the humanoid robot had to spin a spindle device with the hand and simultaneously maintain balance in the presence of external perturbations. In addition, we propose an upgrade that allows switching of control over the leg joints between arm task and posture-control task.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose an approach that combines human demonstrated posture-control skill defined by the motion in the lower limb joints with an inverse kinematics solution of an arbitrary hand motion. The posture-control skill for humanoid robot was obtained through the human-in-the-loop teaching approach. The collected data during the teaching phase was used to approximate functional relation between the state of the robot's centre-of-pressure and the appropriate motion in the joints of the leg. The motion of the robot's hand was prescribed using the inverse kinematic solution. The posture-control skill and the motion of the hand were combined together using the task priority resolution strategy. We tested our approach with an experiment where the humanoid robot had to spin a spindle device with the hand and simultaneously maintain balance in the presence of external perturbations. In addition, we propose an upgrade that allows switching of control over the leg joints between arm task and posture-control task.
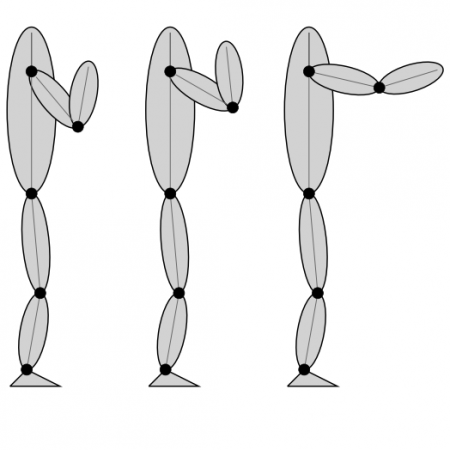
Azad, Morteza; Babič, Jan; Mistry, Michael
Effects of hand contact on the stability of a planar humanoid with a momentum based controller Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 348–353, IEEE, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Kinematics, Neuromusculoskeletal Modelling, Postural Balance | Links:
@inproceedings{Azad2014,
title = {Effects of hand contact on the stability of a planar humanoid with a momentum based controller},
author = {Morteza Azad and Jan Babi\v{c} and Michael Mistry},
url = {http://ieeexplore.ieee.org/document/7041383/},
doi = {10.1109/HUMANOIDS.2014.7041383},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-11-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {348--353},
publisher = {IEEE},
abstract = {This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.},
keywords = {Kinematics, Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper studies the effects of hand contact force on the stability of a planar humanoid robot while translational perturbations are applied to its foot. A momentum based controller is used to control the robot's motion during the perturbations. Simulation results show that the displacements of the center of pressure (CoP) of the foot decrease substantially when there is a supportive contact between the hand and the environment. The simulation results of the CoP displacements and handle forces also conform with the results of the ex- periments on human subjects with different positions of the hand contact. This conformity shows that the momentum based controller adequately models human behaviour in contact with the environment during a balancing motion.
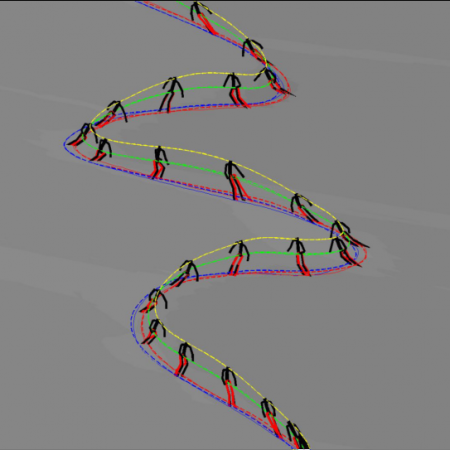
Nemec, Bojan; Petrič, Tadej; Babič, Jan; Supej, Matej
Estimation of Alpine Skier Posture Using Machine Learning Techniques Journal Article
In: Sensors, vol. 14, no. 10, pp. 18898–18914, 2014, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Machine Learning, Postural Balance, Sport | Links:
@article{Nemec2014,
title = {Estimation of Alpine Skier Posture Using Machine Learning Techniques},
author = {Bojan Nemec and Tadej Petri\v{c} and Jan Babi\v{c} and Matej Supej},
url = {https://www.mdpi.com/1424-8220/14/10/18898},
doi = {10.3390/s141018898},
issn = {1424-8220},
year = {2014},
date = {2014-10-01},
journal = {Sensors},
volume = {14},
number = {10},
pages = {18898--18914},
abstract = {High precision Global Navigation Satellite System (GNSS) measurements are becoming more and more popular in alpine skiing due to the relatively undemanding setup and excellent performance. However, GNSS provides only single-point measurements that are defined with the antenna placed typically behind the skier's neck. A key issue is how to estimate other more relevant parameters of the skier's body, like the center of mass (COM) and ski trajectories. Previously, these parameters were estimated by modeling the skier's body with an inverted-pendulum model that oversimplified the skier's body. In this study, we propose two machine learning methods that overcome this shortcoming and estimate COM and skis trajectories based on a more faithful approximation of the skier's body with nine degrees-of-freedom. The first method utilizes a well-established approach of artificial neural networks, while the second method is based on a state-of-the-art statistical generalization method. Both methods were evaluated using the reference measurements obtained on a typical giant slalom course and compared with the inverted-pendulum method. Our results outperform the results of commonly used inverted-pendulum methods and demonstrate the applicability of machine learning techniques in biomechanical measurements of alpine skiing.},
keywords = {Machine Learning, Postural Balance, Sport},
pubstate = {published},
tppubtype = {article}
}
High precision Global Navigation Satellite System (GNSS) measurements are becoming more and more popular in alpine skiing due to the relatively undemanding setup and excellent performance. However, GNSS provides only single-point measurements that are defined with the antenna placed typically behind the skier's neck. A key issue is how to estimate other more relevant parameters of the skier's body, like the center of mass (COM) and ski trajectories. Previously, these parameters were estimated by modeling the skier's body with an inverted-pendulum model that oversimplified the skier's body. In this study, we propose two machine learning methods that overcome this shortcoming and estimate COM and skis trajectories based on a more faithful approximation of the skier's body with nine degrees-of-freedom. The first method utilizes a well-established approach of artificial neural networks, while the second method is based on a state-of-the-art statistical generalization method. Both methods were evaluated using the reference measurements obtained on a typical giant slalom course and compared with the inverted-pendulum method. Our results outperform the results of commonly used inverted-pendulum methods and demonstrate the applicability of machine learning techniques in biomechanical measurements of alpine skiing.
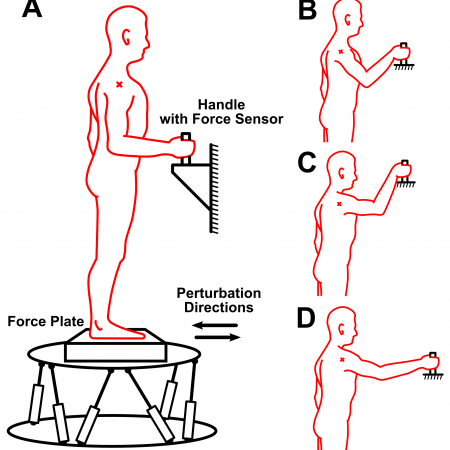
Babič, Jan; Petrič, Tadej; Peternel, Luka; Šarabon, Nejc
Effects of supportive hand contact on reactive postural control during support perturbations Journal Article
In: Gait & Posture, vol. 40, no. 3, pp. 441–446, 2014, ISSN: 09666362.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2014,
title = {Effects of supportive hand contact on reactive postural control during support perturbations},
author = {Jan Babi\v{c} and Tadej Petri\v{c} and Luka Peternel and Nejc \v{S}arabon},
url = {http://www.sciencedirect.com/science/article/pii/S096663621400544X},
doi = {10.1016/j.gaitpost.2014.05.012},
issn = {09666362},
year = {2014},
date = {2014-01-01},
journal = {Gait \& Posture},
volume = {40},
number = {3},
pages = {441--446},
abstract = {There are many everyday situations in which a supportive hand contact is required for an individual to counteract various postural perturbations. By emulating situations when balance of an individual is challenged, we examined functional role of supportive hand contact at different locations where balance of an individual was perturbed by translational perturbations of the support surface. We examined the effects of handle location, perturbation direction and perturbation intensity on the postural control and the forces generated in the handle. There were significantly larger centre-of-pressure (CoP) displacements for perturbations in posterior direction than for perturbations in anterior direction. Besides, the perturbation intensity significantly affected the peak CoP displacement in both perturbation directions. However, the position of the handle had no effects on the peak CoP displacement. On the contrary, there were significant effects of perturbation direction, perturbation intensity and handle position on the maximal force in the handle. The effect of the handle position was significant for the perturbations in posterior direction where the lowest maximal forces were recorded in the handle located at the shoulder height. They were comparable to the forces in the handle at eye height and significantly lower than the forces in the handle located either lower or further away from the shoulder. In summary, our results indicate that although the location of a supportive hand contact has no effect on the peak CoP displacement of healthy individuals, it affects the forces that an individual needs to exert on the handle in order to counteract support perturbations.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
There are many everyday situations in which a supportive hand contact is required for an individual to counteract various postural perturbations. By emulating situations when balance of an individual is challenged, we examined functional role of supportive hand contact at different locations where balance of an individual was perturbed by translational perturbations of the support surface. We examined the effects of handle location, perturbation direction and perturbation intensity on the postural control and the forces generated in the handle. There were significantly larger centre-of-pressure (CoP) displacements for perturbations in posterior direction than for perturbations in anterior direction. Besides, the perturbation intensity significantly affected the peak CoP displacement in both perturbation directions. However, the position of the handle had no effects on the peak CoP displacement. On the contrary, there were significant effects of perturbation direction, perturbation intensity and handle position on the maximal force in the handle. The effect of the handle position was significant for the perturbations in posterior direction where the lowest maximal forces were recorded in the handle located at the shoulder height. They were comparable to the forces in the handle at eye height and significantly lower than the forces in the handle located either lower or further away from the shoulder. In summary, our results indicate that although the location of a supportive hand contact has no effect on the peak CoP displacement of healthy individuals, it affects the forces that an individual needs to exert on the handle in order to counteract support perturbations.

Peternel, Luka; Petrič, Tadej; Oztop, Erhan; Babič, Jan
Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach Journal Article
In: Autonomous Robots, vol. 36, no. 1-2, pp. 123–136, 2014, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@article{Peternel2014b,
title = {Teaching robots to cooperate with humans in dynamic manipulation tasks based on multi-modal human-in-the-loop approach},
author = {Luka Peternel and Tadej Petri\v{c} and Erhan Oztop and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-013-9361-0},
doi = {10.1007/s10514-013-9361-0},
issn = {0929-5593},
year = {2014},
date = {2014-01-01},
journal = {Autonomous Robots},
volume = {36},
number = {1-2},
pages = {123--136},
abstract = {We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
We propose an approach to efficiently teach robots how to perform dynamic manipulation tasks in cooperation with a human partner. The approach utilises human sensorimotor learning ability where the human tutor controls the robot through a multi-modal interface to make it perform the desired task. During the tutoring, the robot simultaneously learns the action policy of the tutor and through time gains full autonomy. We demonstrate our approach by an experiment where we taught a robot how to perform a wood sawing task with a human partner using a two-person cross-cut saw. The challenge of this experiment is that it requires precise coordination of the robot's motion and compliance according to the partner's actions. To transfer the sawing skill from the tutor to the robot we used Locally Weighted Regression for trajectory generalisation, and adaptive oscillators for adaptation of the robot to the partner's motion.
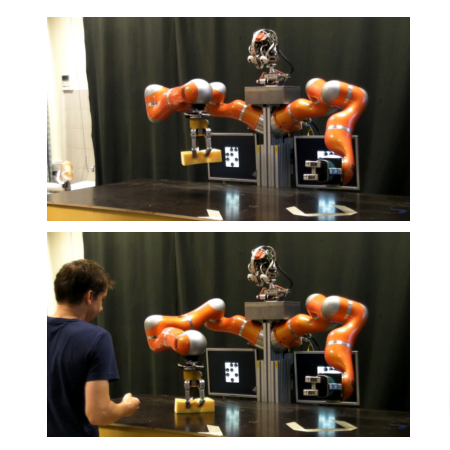
Gams, Andrej; Petrič, Tadej; Nemec, Bojan; Ude, Aleš
Learning and adaptation of periodic motion primitives based on force feedback and human coaching interaction Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 166–171, IEEE, Madrid, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Force Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Gams2014,
title = {Learning and adaptation of periodic motion primitives based on force feedback and human coaching interaction},
author = {Andrej Gams and Tadej Petri\v{c} and Bojan Nemec and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=7041354},
doi = {10.1109/HUMANOIDS.2014.7041354},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-01-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {166--171},
publisher = {IEEE},
address = {Madrid},
abstract = {Dynamic movement primitives (DMP) allow efficient learning and control of complex robot behaviors for both periodic and discrete point-to-point movements either in joint or Cartesian space. They also allow efficient modulation by changing of parameters. In this paper we introduce and evaluate the means of adapting periodic DMP trajectories with respect to force feedback. We simultaneously consider two aspects: 1) adaptation of whole trajectories to comply with the constraints set by the environment; and 2) partially modifying the trajectories during the execution based on human intervention to improve the task performance. The latter can either be force-based, i. e. through physical contact, or through predefined gestures. By intervening when necessary the human acts as a tutor, instructing the robot how to modify the trajectory and bypassing the need to learn new trajectories by autonomous exploration. We introduce the approach in the context of wiping a surface, where the robot first has to acquire and maintain contact, and where later the human tutor modifies the originally learned trajectory in order to achieve the desired robot behavior. We present simulation and real world results of wiping a surface with a Kuka 7 degree-of-freedom LWR robot.},
keywords = {Force Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Dynamic movement primitives (DMP) allow efficient learning and control of complex robot behaviors for both periodic and discrete point-to-point movements either in joint or Cartesian space. They also allow efficient modulation by changing of parameters. In this paper we introduce and evaluate the means of adapting periodic DMP trajectories with respect to force feedback. We simultaneously consider two aspects: 1) adaptation of whole trajectories to comply with the constraints set by the environment; and 2) partially modifying the trajectories during the execution based on human intervention to improve the task performance. The latter can either be force-based, i. e. through physical contact, or through predefined gestures. By intervening when necessary the human acts as a tutor, instructing the robot how to modify the trajectory and bypassing the need to learn new trajectories by autonomous exploration. We introduce the approach in the context of wiping a surface, where the robot first has to acquire and maintain contact, and where later the human tutor modifies the originally learned trajectory in order to achieve the desired robot behavior. We present simulation and real world results of wiping a surface with a Kuka 7 degree-of-freedom LWR robot.
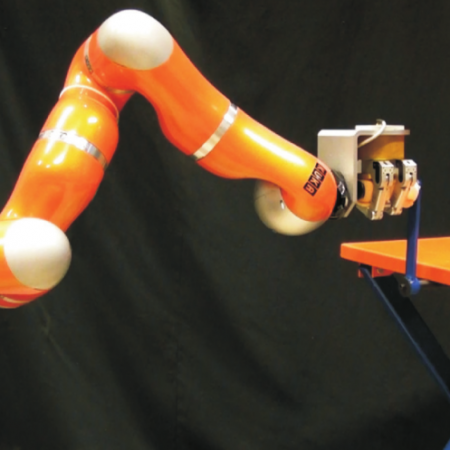
Petrič, Tadej; Gams, Andrej; Žlajpah, Leon; Ude, Aleš; Morimoto, Jun
Online approach for altering robot behaviors based on human in the loop coaching gestures Proceedings Article
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 4770–4776, IEEE, Hong Kong, 2014, ISSN: 10504729.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Optimal Control | Links:
@inproceedings{Petric2014a,
title = {Online approach for altering robot behaviors based on human in the loop coaching gestures},
author = {Tadej Petri\v{c} and Andrej Gams and Leon \v{Z}lajpah and Ale\v{s} Ude and Jun Morimoto},
url = {http://ieeexplore.ieee.org/document/6907557/},
doi = {10.1109/ICRA.2014.6907557},
issn = {10504729},
year = {2014},
date = {2014-01-01},
booktitle = {2014 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {4770--4776},
publisher = {IEEE},
address = {Hong Kong},
abstract = {The creation and adaptation of motor behaviors is an important capability for autonomous robots. In this paper we propose an approach for altering existing robot behaviors online, where a human coach interactively changes the robot motion to achieve the desired outcome. Using hand gestures, the human coach can specify the desired modifications to the previously acquired behavior. To preserve a natural posture while performing the task, the movement is encoded in the robot's joint space using periodic dynamic movement primitives. The coaching gestures are mapped to the robot joint space via robot Jacobian and used to create a virtual force field affecting the movement. A recursive least squares technique is used to modify the existing movement with respect to the virtual force field. The proposed approach was evaluated on a simulated three degrees of freedom planar robot and on a real humanoid robot, where human coaching gestures were captured by an RGB-D sensor. Although our focus was on rhythmic movements, the developed approach is also applicable to discrete (point-to-point) movements.},
keywords = {Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
The creation and adaptation of motor behaviors is an important capability for autonomous robots. In this paper we propose an approach for altering existing robot behaviors online, where a human coach interactively changes the robot motion to achieve the desired outcome. Using hand gestures, the human coach can specify the desired modifications to the previously acquired behavior. To preserve a natural posture while performing the task, the movement is encoded in the robot's joint space using periodic dynamic movement primitives. The coaching gestures are mapped to the robot joint space via robot Jacobian and used to create a virtual force field affecting the movement. A recursive least squares technique is used to modify the existing movement with respect to the virtual force field. The proposed approach was evaluated on a simulated three degrees of freedom planar robot and on a real humanoid robot, where human coaching gestures were captured by an RGB-D sensor. Although our focus was on rhythmic movements, the developed approach is also applicable to discrete (point-to-point) movements.
2013
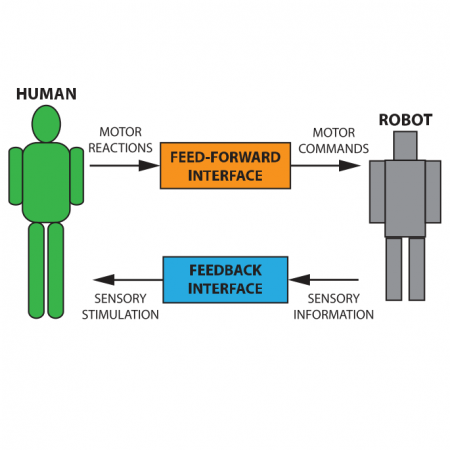
Peternel, Luka; Babič, Jan
Learning of compliant human–robot interaction using full-body haptic interface Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 1003–1012, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Peternel2013b,
title = {Learning of compliant human\textendashrobot interaction using full-body haptic interface},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.808305},
doi = {10.1080/01691864.2013.808305},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {1003--1012},
publisher = {Taylor \& Francis},
abstract = {We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.
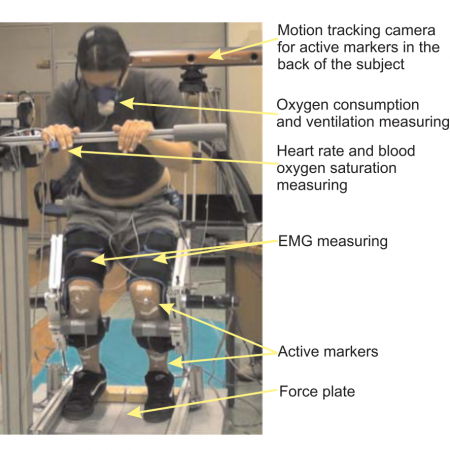
Petrič, Tadej; Gams, Andrej; Debevec, Tadej; Žlajpah, Leon; Babič, Jan
Control approaches for robotic knee exoskeleton and their effects on human motion Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 993–1002, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Petric2013a,
title = {Control approaches for robotic knee exoskeleton and their effects on human motion},
author = {Tadej Petri\v{c} and Andrej Gams and Tadej Debevec and Leon \v{Z}lajpah and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.804164},
doi = {10.1080/01691864.2013.804164},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {993--1002},
publisher = {Taylor \& Francis},
abstract = {In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics. In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics. In this paper we compare three noninvasive control methods for a robotic knee exoskeleton and asses their kinematic influences on the repetitive squatting motions of able-bodied human subjects. The motion of the subjects wearing the knee exoskeleton was also compared to the motion of the subjects performing the same task without using the assistance of the knee exoskeleton. We chose the squatting motion because it approximates common movements with high metabolic cost, such as standing up from a chair and ascending or descending the stairs. Beside the two classical robotic control approaches, i.e. the position control and the gravity compensation, we propose a method that is based on a single adaptive frequency oscillator combined with an adaptive Fourier series in a feedback loop. The method can extract frequency and phase of an arbitrary periodic signal in real-time. This method is particularly appropriate for controlling novel robotic assisting devices since it does not require complex signal sensing or user calibration. The results show that the total knee torque was increased while using the exoskeleton device compared to the squatting without the assistance of the exoskeleton device. In effect, there were significant kinematic adaptations observed when the exoskleton device assisted the motion of the subjects. However, no significant kinematic differences were found between different control methods. We conclude that an assistive device can augment the abilities of the able-bodied humans in the targeted joints (i.e. the joints provided with additional mechanical power) but, on the other hand, significantly alters whole body kinematics.
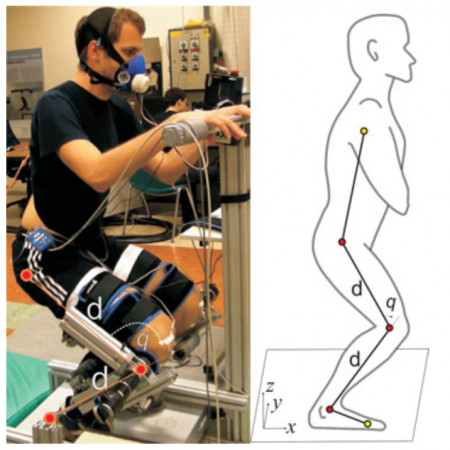
Gams, Andrej; Petrič, Tadej; Debevec, Tadej; Babič, Jan
Effects of Robotic Knee Exoskeleton on Human Energy Expenditure Journal Article
In: IEEE Transactions on Biomedical Engineering, vol. 60, no. 6, pp. 1636–1644, 2013, ISSN: 0018-9294.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Gams2013,
title = {Effects of Robotic Knee Exoskeleton on Human Energy Expenditure},
author = {Andrej Gams and Tadej Petri\v{c} and Tadej Debevec and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6414598/},
doi = {10.1109/TBME.2013.2240682},
issn = {0018-9294},
year = {2013},
date = {2013-06-01},
journal = {IEEE Transactions on Biomedical Engineering},
volume = {60},
number = {6},
pages = {1636--1644},
abstract = {A number of studies discuss the design and control of various exoskeleton mechanisms, yet relatively few address the effect on the energy expenditure of the user. In this paper, we discuss the effect of a performance augmenting exoskeleton on the metabolic cost of an able-bodied user/pilot during periodic squatting. We investigated whether an exoskeleton device will significantly reduce the metabolic cost and what is the influence of the chosen device control strategy. By measuring oxygen consumption, minute ventilation, heart rate, blood oxygenation, and muscle EMG during 5-min squatting series, at one squat every 2 s, we show the effects of using a prototype robotic knee exoskeleton under three different noninvasive control approaches: gravity compensation approach, position-based approach, and a novel oscillator-based approach. The latter proposes a novel control that ensures synchronization of the device and the user. Statistically significant decrease in physiological responses can be observed when using the robotic knee exoskeleton under gravity compensation and oscillator-based control. On the other hand, the effects of position-based control were not significant in all parameters although all approaches significantly reduced the energy expenditure during squatting.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
A number of studies discuss the design and control of various exoskeleton mechanisms, yet relatively few address the effect on the energy expenditure of the user. In this paper, we discuss the effect of a performance augmenting exoskeleton on the metabolic cost of an able-bodied user/pilot during periodic squatting. We investigated whether an exoskeleton device will significantly reduce the metabolic cost and what is the influence of the chosen device control strategy. By measuring oxygen consumption, minute ventilation, heart rate, blood oxygenation, and muscle EMG during 5-min squatting series, at one squat every 2 s, we show the effects of using a prototype robotic knee exoskeleton under three different noninvasive control approaches: gravity compensation approach, position-based approach, and a novel oscillator-based approach. The latter proposes a novel control that ensures synchronization of the device and the user. Statistically significant decrease in physiological responses can be observed when using the robotic knee exoskeleton under gravity compensation and oscillator-based control. On the other hand, the effects of position-based control were not significant in all parameters although all approaches significantly reduced the energy expenditure during squatting.
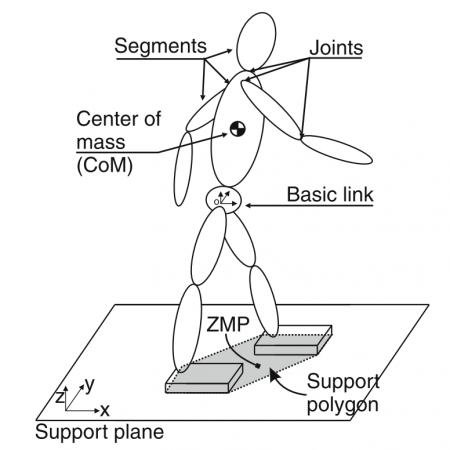
Petrič, Tadej; Gams, Andrej; Babič, Jan; Žlajpah, Leon
Reflexive stability control framework for humanoid robots Journal Article
In: Autonomous Robots, vol. 34, no. 4, pp. 347–361, 2013, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Postural Balance | Links:
@article{Petric2013,
title = {Reflexive stability control framework for humanoid robots},
author = {Tadej Petri\v{c} and Andrej Gams and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {http://link.springer.com/10.1007/s10514-013-9329-0},
doi = {10.1007/s10514-013-9329-0},
issn = {0929-5593},
year = {2013},
date = {2013-01-01},
journal = {Autonomous Robots},
volume = {34},
number = {4},
pages = {347--361},
abstract = {In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose a general control framework for ensuring stability of humanoid robots, determined through a normalized zero-moment-point (ZMP). The proposed method is based on the modified prioritized kinematic control, which allows smooth and continuous transition between priorities. This, as long as the selected criterion is met, allows arbitrary joint movement of a robot without any regard of the consequential movement of the ZMP. On the other hand, it constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has a higher priority than the desired, conscious movement. The transition between the two is smooth and reversible. Furthermore, the switching is encapsulated in a single modified prioritized task control equation. We demonstrate the properties of the algorithm on two human-inspired robots developed in our laboratory; a human-inspired leg-robot used for imitating human movement and a skiing robot.
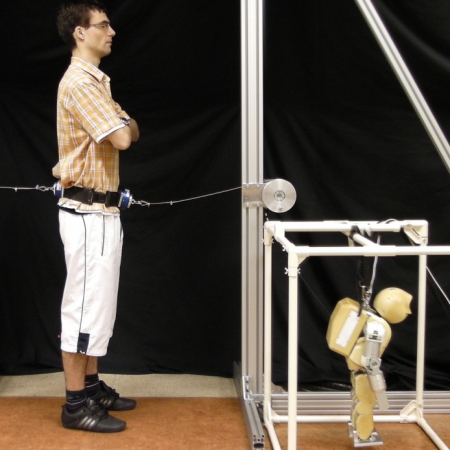
Peternel, Luka; Babič, Jan
Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability Proceedings Article
In: 2013 IEEE International Conference on Robotics and Automation, pp. 5329–5334, IEEE, Karlsruhe, 2013, ISBN: 978-1-4673-5643-5.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning | Links:
@inproceedings{Peternel2013a,
title = {Humanoid robot posture-control learning in real-time based on human sensorimotor learning ability},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6631340/},
doi = {10.1109/ICRA.2013.6631340},
isbn = {978-1-4673-5643-5},
year = {2013},
date = {2013-01-01},
booktitle = {2013 IEEE International Conference on Robotics and Automation},
pages = {5329--5334},
publisher = {IEEE},
address = {Karlsruhe},
abstract = {In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.},
keywords = {Human-in-the-Loop Control, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a system capable of teaching humanoid robots new skills in real-time. The system aims to simplify the robot control and to provide a natural and intuitive interaction between the human and the robot. The key element of the system is exploitation of the human sensorimotor learning ability where a human demonstrator learns how to operate a robot in the same fashion as humans adapt to various everyday tasks. Another key aspect of the proposed system is that the robot learns the task simultaneously while the human is operating the robot. This enables the control of the robot to be gradually transferred from the human to the robot during the demonstration. The control is transferred based on the accuracy of the imitated task. We demonstrated our approach using an experiment where a human demonstrator taught a humanoid robot how to maintain the postural stability in the presence of the perturbations. To provide the appropriate feedback information of the robot's postural stability to the human sensorimotor system, we utilized a custom-built haptic interface. To absorb the demonstrated skill by the robot, we used Locally Weighted Projection Regression machine learning method. A novel approach was implemented to gradually transfer the control responsibility from the human to the incrementally built autonomous robot controller.
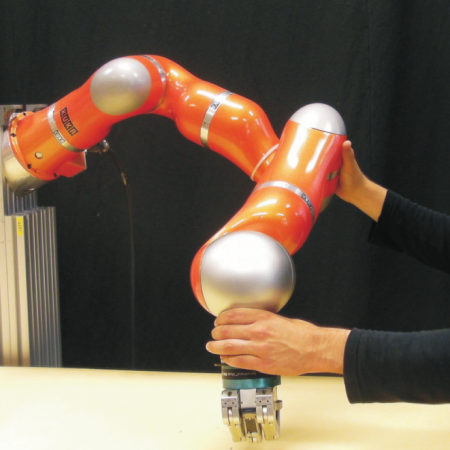
Deniša, Miha; Petrič, Tadej; Asfour, Tamim; Ude, Aleš
Synthesizing compliant reaching movements by searching a database of example trajectories Proceedings Article
In: 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), pp. 540–546, IEEE, Atlanta, 2013, ISBN: 978-1-4799-2617-6.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Kinematics | Links:
@inproceedings{Denisa2013,
title = {Synthesizing compliant reaching movements by searching a database of example trajectories},
author = {Miha Deni\v{s}a and Tadej Petri\v{c} and Tamim Asfour and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/7030026/},
doi = {10.1109/HUMANOIDS.2013.7030026},
isbn = {978-1-4799-2617-6},
year = {2013},
date = {2013-01-01},
booktitle = {2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids)},
pages = {540--546},
publisher = {IEEE},
address = {Atlanta},
abstract = {We address the problem of generating new com- pliant reaching movements by searching a structured database of example trajectories. The proposed control framework is a multi-step process, where in the first step a human tutor teaches the robot how to perform a set of example reaching movements. In the second step, the recorded motion trajectories are executed with different velocities using a high gain feedback controller, for the purpose of learning corresponding torque control signals. The commanded torques are measured and stored together with the trajectory data. This data is organized in a hierarchical, graph-like structure, thereby providing the basis for search for new compliant trajectories, which can consist of parts of the previously acquired example movements. The proposed approach can construct a complete representation for newly discovered movements, including the feedforward torque commands. Finally, in the last step, the motion is executed using a low gain feedback controller and the associated feedforward torque signal. This ensures sufficient tracking accuracy and at the same time compliant behavior, which allows smooth interaction with the environment and is safe for cooperative task execution with humans. The usefulness of the proposed method was shown on a Kuka LWR robot.},
keywords = {Compliance and Impedance Control, Kinematics},
pubstate = {published},
tppubtype = {inproceedings}
}
We address the problem of generating new com- pliant reaching movements by searching a structured database of example trajectories. The proposed control framework is a multi-step process, where in the first step a human tutor teaches the robot how to perform a set of example reaching movements. In the second step, the recorded motion trajectories are executed with different velocities using a high gain feedback controller, for the purpose of learning corresponding torque control signals. The commanded torques are measured and stored together with the trajectory data. This data is organized in a hierarchical, graph-like structure, thereby providing the basis for search for new compliant trajectories, which can consist of parts of the previously acquired example movements. The proposed approach can construct a complete representation for newly discovered movements, including the feedforward torque commands. Finally, in the last step, the motion is executed using a low gain feedback controller and the associated feedforward torque signal. This ensures sufficient tracking accuracy and at the same time compliant behavior, which allows smooth interaction with the environment and is safe for cooperative task execution with humans. The usefulness of the proposed method was shown on a Kuka LWR robot.

Petrič, Tadej; Žlajpah, Leon
Smooth continuous transition between tasks on a kinematic control level: Obstacle avoidance as a control problem Journal Article
In: Robotics and Autonomous Systems, vol. 61, no. 9, pp. 948–959, 2013, ISSN: 09218890.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Optimal Control | Links:
@article{Petric2013c,
title = {Smooth continuous transition between tasks on a kinematic control level: Obstacle avoidance as a control problem},
author = {Tadej Petri\v{c} and Leon \v{Z}lajpah},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889013000833},
doi = {10.1016/j.robot.2013.04.019},
issn = {09218890},
year = {2013},
date = {2013-01-01},
journal = {Robotics and Autonomous Systems},
volume = {61},
number = {9},
pages = {948--959},
publisher = {Elsevier B.V.},
abstract = {Kinematically redundant robots allow simultaneous execution of several tasks with different priorities. Beside the main task, obstacle avoidance is one commonly used subtask. The ability to avoid obstacles is especially important when the robot is working in a human environment. In this paper, we propose a novel control method for kinematically redundant robots, where we focus on a smooth, continuous transition between different tasks. The method is based on a new and very simple null-space formulation. Sufficient conditions for the tasks design are given using the Lyapunov-based stability discussion. The effectiveness of the proposed control method is demonstrated by simulation and on a real robot. Pros and cons of the proposed method and the comparison with other control methods are also discussed.},
keywords = {Human-in-the-Loop Control, Optimal Control},
pubstate = {published},
tppubtype = {article}
}
Kinematically redundant robots allow simultaneous execution of several tasks with different priorities. Beside the main task, obstacle avoidance is one commonly used subtask. The ability to avoid obstacles is especially important when the robot is working in a human environment. In this paper, we propose a novel control method for kinematically redundant robots, where we focus on a smooth, continuous transition between different tasks. The method is based on a new and very simple null-space formulation. Sufficient conditions for the tasks design are given using the Lyapunov-based stability discussion. The effectiveness of the proposed control method is demonstrated by simulation and on a real robot. Pros and cons of the proposed method and the comparison with other control methods are also discussed.
2012
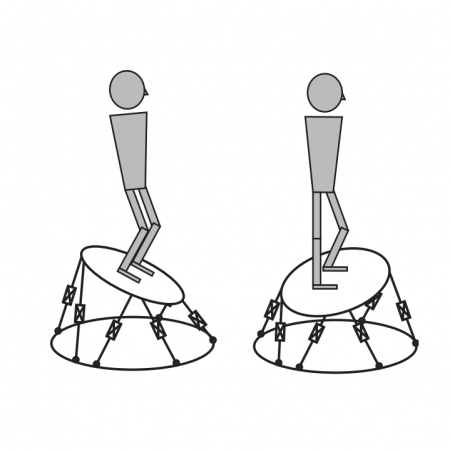
Babič, Jan; Škorja, Goran
Analysis of musculoskeletal system responses to pertrubations during standing posture Journal Article
In: Elektrotehniski Vestnik/Electrotechnical Review, vol. 79, no. 1-2, pp. 7–12, 2012, ISSN: 00135852.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2012,
title = {Analysis of musculoskeletal system responses to pertrubations during standing posture},
author = {Jan Babi\v{c} and Goran \v{S}korja},
url = {http://ev.fe.uni-lj.si/1-2-2012/Babic.pdf},
issn = {00135852},
year = {2012},
date = {2012-01-01},
journal = {Elektrotehniski Vestnik/Electrotechnical Review},
volume = {79},
number = {1-2},
pages = {7--12},
abstract = {The purpose of the study is to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. We used an enhanced experimental approach compared to the traditionally used methods in the previous studies by other researchers where the support surface beneath the subject's feet randomly perturbed the equilibrium. Instead of a predetermined motion of the support surface that would cause the perturbation of the subject's equilibrium, we perturbed the equilibrium by a Stewart parallel platform. Mounted on the platform, a force plate was recording the motion of the centre-of-mass projection during the experiment. This setup enabled the subjects to actively control the orientation of the parallel platform by shifting the position of their centre-of-mass during the experiment. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses to the visual stimuli. Compared to the results of the previous studies, muscular activities during the stretch and proprioceptive reflex are more equally distributed in all directions. Based on the motion of the subjects that we recorded using the motion capture system, we determined whether the muscles were stretching or extending during the responses to the perturbations. We also show the effectiveness of the muscles to compensate the perturbations in different directions.},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The purpose of the study is to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. We used an enhanced experimental approach compared to the traditionally used methods in the previous studies by other researchers where the support surface beneath the subject's feet randomly perturbed the equilibrium. Instead of a predetermined motion of the support surface that would cause the perturbation of the subject's equilibrium, we perturbed the equilibrium by a Stewart parallel platform. Mounted on the platform, a force plate was recording the motion of the centre-of-mass projection during the experiment. This setup enabled the subjects to actively control the orientation of the parallel platform by shifting the position of their centre-of-mass during the experiment. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses to the visual stimuli. Compared to the results of the previous studies, muscular activities during the stretch and proprioceptive reflex are more equally distributed in all directions. Based on the motion of the subjects that we recorded using the motion capture system, we determined whether the muscles were stretching or extending during the responses to the perturbations. We also show the effectiveness of the muscles to compensate the perturbations in different directions.
2011

Babič, Jan
Utilization of human sensorimotor learning capacity for obtaining novel robot behaviours: 2-DOF ball balancing on a parallel platform Proceedings Article
In: 2011 IEEE International Conference on Robotics and Biomimetics, pp. 1778–1782, IEEE, Karon Beach, 2011, ISBN: 978-1-4577-2138-0.
Abstract | BibTeX | Tags: Ergonomy, Machine Learning, Sensorimotor Learning | Links:
@inproceedings{Babic2011a,
title = {Utilization of human sensorimotor learning capacity for obtaining novel robot behaviours: 2-DOF ball balancing on a parallel platform},
author = {Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6181547/},
doi = {10.1109/ROBIO.2011.6181547},
isbn = {978-1-4577-2138-0},
year = {2011},
date = {2011-12-01},
booktitle = {2011 IEEE International Conference on Robotics and Biomimetics},
pages = {1778--1782},
publisher = {IEEE},
address = {Karon Beach},
abstract = {We propose a novel method for acquiring robot skill synthesis that exploits human capability to learn and to control complex tools and devices. The basic idea is to consider the target robotic system as a complex tool akin a computer mouse or a car that can be intuitively controlled by a human. Once the human learns how to control the robotic system effortlessly, the target behaviour can be obtained by the human on the robot through practice. The successful execution of the desired task by the human via the robot implies that the required control commands have been discovered by the human, and can subsequently be used for designing controller that operate autonomously. In this article, we demonstrate this idea by presenting a 2-DOF ball balancing task on a parallel platform obtained with the proposed method.},
keywords = {Ergonomy, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose a novel method for acquiring robot skill synthesis that exploits human capability to learn and to control complex tools and devices. The basic idea is to consider the target robotic system as a complex tool akin a computer mouse or a car that can be intuitively controlled by a human. Once the human learns how to control the robotic system effortlessly, the target behaviour can be obtained by the human on the robot through practice. The successful execution of the desired task by the human via the robot implies that the required control commands have been discovered by the human, and can subsequently be used for designing controller that operate autonomously. In this article, we demonstrate this idea by presenting a 2-DOF ball balancing task on a parallel platform obtained with the proposed method.
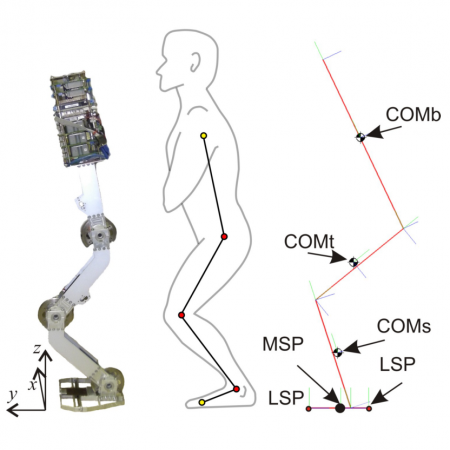
Gams, Andrej; Petrič, Tadej; Babič, Jan; Žlajpah, Leon; Ude, Aleš
Constraining movement imitation with reflexive behavior: Robot squatting Proceedings Article
In: 2011 11th IEEE-RAS International Conference on Humanoid Robots, pp. 294–299, IEEE, Bled, 2011, ISBN: 978-1-61284-868-6.
Abstract | BibTeX | Tags: Dynamic Motion, Postural Balance | Links:
@inproceedings{Gams2011,
title = {Constraining movement imitation with reflexive behavior: Robot squatting},
author = {Andrej Gams and Tadej Petri\v{c} and Jan Babi\v{c} and Leon \v{Z}lajpah and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/6100816/},
doi = {10.1109/Humanoids.2011.6100816},
isbn = {978-1-61284-868-6},
year = {2011},
date = {2011-10-01},
booktitle = {2011 11th IEEE-RAS International Conference on Humanoid Robots},
pages = {294--299},
publisher = {IEEE},
address = {Bled},
abstract = {Direct imitation of human movement with a hu- manoid robot, which has a similar kinematic structure, does not guarantee a successful completion of the task because of different dynamical properties. Our research starts by showing how to apply a generalization algorithm to extract the desired movement primitives from multiple human demonstrations. The emphasis of the paper is on a method that constrains the extracted movement primitives when mapping them to a robot, taking into account a critical criterion of the task. As a practical example we study the stability of a robot, which is determined through a normalized zero-moment-point. Our approach is based on prioritized task control and allows direct movement transfer as long as the selected criterion is met. It only constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has higher priority than the desired, conscious movement. We demonstrate the properties of the algorithm on a real, human- inspired leg robot developed in our laboratory.},
keywords = {Dynamic Motion, Postural Balance},
pubstate = {published},
tppubtype = {inproceedings}
}
Direct imitation of human movement with a hu- manoid robot, which has a similar kinematic structure, does not guarantee a successful completion of the task because of different dynamical properties. Our research starts by showing how to apply a generalization algorithm to extract the desired movement primitives from multiple human demonstrations. The emphasis of the paper is on a method that constrains the extracted movement primitives when mapping them to a robot, taking into account a critical criterion of the task. As a practical example we study the stability of a robot, which is determined through a normalized zero-moment-point. Our approach is based on prioritized task control and allows direct movement transfer as long as the selected criterion is met. It only constrains the movement when the criterion approaches a critical condition. The critical condition thus triggers a reflexive, subconscious behavior, which has higher priority than the desired, conscious movement. We demonstrate the properties of the algorithm on a real, human- inspired leg robot developed in our laboratory.
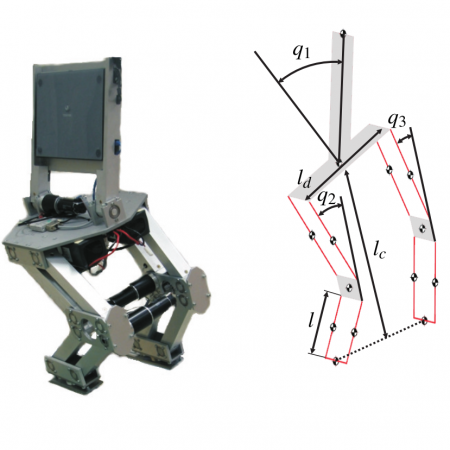
Petrič, Tadej; Nemec, Bojan; Babič, Jan; Žlajpah, Leon
Multilayer control of skiing robot Proceedings Article
In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4832–4837, IEEE, San Francisco, 2011, ISBN: 978-1-61284-454-1.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion | Links:
@inproceedings{Petric2011,
title = {Multilayer control of skiing robot},
author = {Tadej Petri\v{c} and Bojan Nemec and Jan Babi\v{c} and Leon \v{Z}lajpah},
url = {https://ieeexplore.ieee.org/document/6094546/},
doi = {10.1109/IROS.2011.6048154},
isbn = {978-1-61284-454-1},
year = {2011},
date = {2011-09-01},
booktitle = {2011 IEEE/RSJ International Conference on Intelligent Robots and Systems},
pages = {4832--4837},
publisher = {IEEE},
address = {San Francisco},
abstract = {In this paper we propose a novel method for ensuring stability of a skiing robot on a previously unknown ski slope. The method is based on a null-space velocity control algorithm, which is essential for achieving good behavior of redundant robotic systems. Using the pseudo-inverse, the task and the null-space motions are decoupled. For the skiing robot, the primary task is stability, the secondary task is the direction and the third task is the pose of the robot. The dynamic stability index of the skiing robot is defined with the normalized zero moment point. We demonstrated the effectiveness of the proposed method both in simulation in the virtual reality environment as well as on the real robot.},
keywords = {Compliance and Impedance Control, Dynamic Motion},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel method for ensuring stability of a skiing robot on a previously unknown ski slope. The method is based on a null-space velocity control algorithm, which is essential for achieving good behavior of redundant robotic systems. Using the pseudo-inverse, the task and the null-space motions are decoupled. For the skiing robot, the primary task is stability, the secondary task is the direction and the third task is the pose of the robot. The dynamic stability index of the skiing robot is defined with the normalized zero moment point. We demonstrated the effectiveness of the proposed method both in simulation in the virtual reality environment as well as on the real robot.
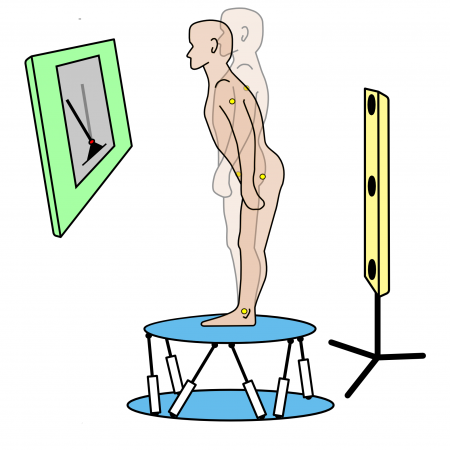
Babič, Jan; Hale, Joshua; Oztop, Erhan
Human sensorimotor learning for humanoid robot skill synthesis Journal Article
In: Adaptive Behavior, vol. 19, no. 4, pp. 250–263, 2011, ISSN: 1059-7123.
Abstract | BibTeX | Tags: Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning | Links:
@article{Babic2011b,
title = {Human sensorimotor learning for humanoid robot skill synthesis},
author = {Jan Babi\v{c} and Joshua Hale and Erhan Oztop},
url = {http://journals.sagepub.com/doi/10.1177/1059712311411112},
doi = {10.1177/1059712311411112},
issn = {1059-7123},
year = {2011},
date = {2011-01-01},
journal = {Adaptive Behavior},
volume = {19},
number = {4},
pages = {250--263},
abstract = {Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.},
keywords = {Dynamic Motion, Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are very skilled at learning new control tasks, and in particular, the use of novel tools. In this article we propose a paradigm that utilizes this sensorimotor learning capacity to obtain robot behaviors, which would otherwise require manual programming by experts. The concept is to consider the target robot platform as a tool to be controlled intuitively by a human. The human is therefore provided with an interface designed to make the control of the robot intuitive, and learns to perform a given task using the robot. This is akin to the stage where a beginner learns to drive a car. After human learning, the skilled control of the robot is used to build an autonomous controller so that the robot can perform the task without human guidance. We demonstrate the feasibility of this proposal for humanoid robot skill synthesis by showing how a statically stable reaching skill can be obtained by means of this framework. In addition, we analyze the feedback interface component of this paradigm by examining a dynamics task, in which a human learns to use the motion of the body to control the posture of an inverted pendulum that approximates a humanoid robot, so that it stays upright.
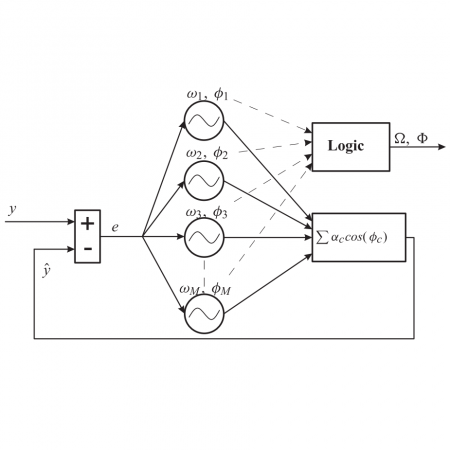
Petrič, Tadej; Gams, Andrej; Ijspeert, Auke J; Žlajpah, Leon
On-line frequency adaptation and movement imitation for rhythmic robotic tasks Journal Article
In: The International Journal of Robotics Research, vol. 30, no. 14, pp. 1775–1788, 2011, ISSN: 0278-3649.
Abstract | BibTeX | Tags: Dynamic Motion, Kinematics | Links:
@article{Petric2011a,
title = {On-line frequency adaptation and movement imitation for rhythmic robotic tasks},
author = {Tadej Petri\v{c} and Andrej Gams and Auke J Ijspeert and Leon \v{Z}lajpah},
url = {http://journals.sagepub.com/doi/10.1177/0278364911421511},
doi = {10.1177/0278364911421511},
issn = {0278-3649},
year = {2011},
date = {2011-01-01},
journal = {The International Journal of Robotics Research},
volume = {30},
number = {14},
pages = {1775--1788},
abstract = {In this paper we present a novel method to obtain the basic frequency of an unknown periodic signal with an arbitrary waveform, which can work online with no additional signal processing or logical operations. The method originates from non-linear dynamical systems for frequency extraction, which are based on adaptive frequency oscillators in a feedback loop. In previous work, we had developed a method that could extract separate frequency components by using several adaptive frequency oscillators in a loop, but that method required a logical algorithm to identify the basic frequency. The novel method presented here uses a Fourier series representation in the feedback loop combined with a single oscillator. In this way it can extract the frequency and the phase of an unknown periodic signal in real time and without any additional signal processing or preprocessing. The method determines the Fourier series coefficients and can be used for dynamic Fourier series implementation. The proposed method can be used for the control of rhythmic robotic tasks, where only the extraction of the basic frequency is crucial. For demonstration several highly non-linear and dynamic periodic robotic tasks are shown, including also a task where an electromyography (EMG) signal is used in a feedback loop.},
keywords = {Dynamic Motion, Kinematics},
pubstate = {published},
tppubtype = {article}
}
In this paper we present a novel method to obtain the basic frequency of an unknown periodic signal with an arbitrary waveform, which can work online with no additional signal processing or logical operations. The method originates from non-linear dynamical systems for frequency extraction, which are based on adaptive frequency oscillators in a feedback loop. In previous work, we had developed a method that could extract separate frequency components by using several adaptive frequency oscillators in a loop, but that method required a logical algorithm to identify the basic frequency. The novel method presented here uses a Fourier series representation in the feedback loop combined with a single oscillator. In this way it can extract the frequency and the phase of an unknown periodic signal in real time and without any additional signal processing or preprocessing. The method determines the Fourier series coefficients and can be used for dynamic Fourier series implementation. The proposed method can be used for the control of rhythmic robotic tasks, where only the extraction of the basic frequency is crucial. For demonstration several highly non-linear and dynamic periodic robotic tasks are shown, including also a task where an electromyography (EMG) signal is used in a feedback loop.
2010
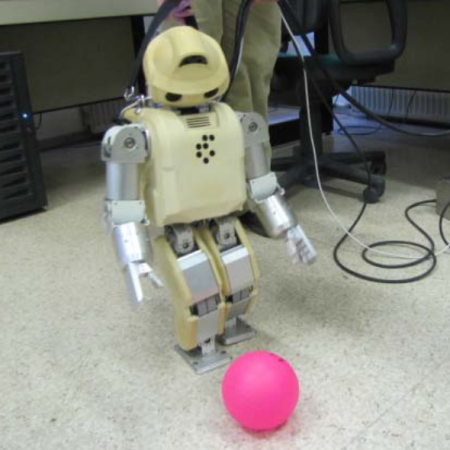
Kos, Andrej; Babič, Jan
Programming and control of humanoid robot football playing tasks Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 115–118, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Dynamic Motion | Links:
@inproceedings{Kos2010,
title = {Programming and control of humanoid robot football playing tasks},
author = {Andrej Kos and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/5524600/},
doi = {10.1109/RAAD.2010.5524600},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-06-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {115--118},
publisher = {IEEE},
address = {Budapest},
abstract = {The goal of our research was to create an application which could be used to program the humanoid robot with tasks needed to play football. The design of our system enables us to program sequential tasks. The tasks are constructed from a programmed logic interface and pre-programmed motions. This system is easy to use and can be adapted to perform different tasks. Because of its characteristics the system was used to demonstrate basic concepts of mobile humanoid robots to students.},
keywords = {Dynamic Motion},
pubstate = {published},
tppubtype = {inproceedings}
}
The goal of our research was to create an application which could be used to program the humanoid robot with tasks needed to play football. The design of our system enables us to program sequential tasks. The tasks are constructed from a programmed logic interface and pre-programmed motions. This system is easy to use and can be adapted to perform different tasks. Because of its characteristics the system was used to demonstrate basic concepts of mobile humanoid robots to students.

Škorja, Goran; Babič, Jan
Implementation of the three degrees-of-freedom parallel platform in human posture analysis Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 321–326, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Postural Balance, Robot Design | Links:
@inproceedings{Skorja2010a,
title = {Implementation of the three degrees-of-freedom parallel platform in human posture analysis},
author = {Goran \v{S}korja and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/5524566/},
doi = {10.1109/RAAD.2010.5524566},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-06-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {321--326},
publisher = {IEEE},
address = {Budapest},
abstract = {The purpose of this study was to implement a three degrees-of-freedom inclining parallel platform to provide postural perturbations for examining human balance during the standing posture. The inclining parallel platform was capable of generating random rotation disturbances in sixteen different directions. By measuring the projection of the subject's centre of mass with a force plate mounted on top of the parallel platform, we had the ability to control the parallel platform rotation in a real time.},
keywords = {Postural Balance, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
The purpose of this study was to implement a three degrees-of-freedom inclining parallel platform to provide postural perturbations for examining human balance during the standing posture. The inclining parallel platform was capable of generating random rotation disturbances in sixteen different directions. By measuring the projection of the subject's centre of mass with a force plate mounted on top of the parallel platform, we had the ability to control the parallel platform rotation in a real time.
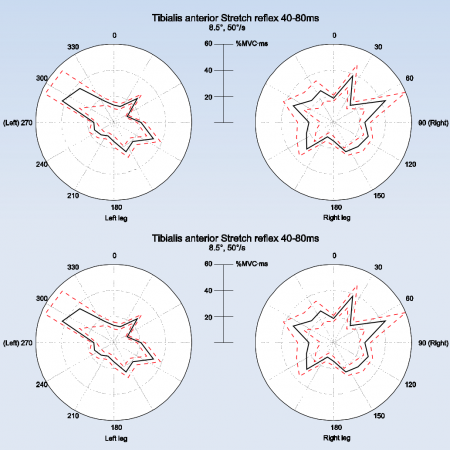
Škorja, Goran; Babič, Jan
Postural Control Analysis during Angular Perturbations of the Support Surface Book Section
In: Lim, Chwee T; Goh, James C H (Ed.): IFMBE Proceedings, vol. 31 IFMBE, pp. 969–972, Springer, 2010, ISSN: 16800737.
Abstract | BibTeX | Tags: Muscle Mechanics, Postural Balance | Links:
@incollection{Skorja2010,
title = {Postural Control Analysis during Angular Perturbations of the Support Surface},
author = {Goran \v{S}korja and Jan Babi\v{c}},
editor = {Chwee T Lim and James C H Goh},
url = {http://link.springer.com/10.1007/978-3-642-14515-5_247},
doi = {10.1007/978-3-642-14515-5_247},
issn = {16800737},
year = {2010},
date = {2010-01-01},
booktitle = {IFMBE Proceedings},
volume = {31 IFMBE},
pages = {969--972},
publisher = {Springer},
abstract = {The purpose of the study was to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. Instead of a simple tilting platform to induce rotational perturbations of the support surface used in the previous studies, we used a Stewart parallel platform with an integrated force platform that enabled the subjects to actively control the orientation of the platform by shifting their centre of mass position. In contrast to the previous studies where the muscular responses had no effect on the motion of the subject and were in some sense isometric responses, our reported muscular responses result in the motion of the subject's body and are therefore a better approximation to the real-world situations. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses based on the visual stimuli. We also showed the effectiveness of the muscles to counter the perturbations in different directions. The results show that the perturbations in anterior-posterior direction were compensated more efficiently than the perturbations in medial-lateral direction.},
keywords = {Muscle Mechanics, Postural Balance},
pubstate = {published},
tppubtype = {incollection}
}
The purpose of the study was to examine the muscular responses of healthy adult subjects to support surface rotations in pitch and roll planes. Instead of a simple tilting platform to induce rotational perturbations of the support surface used in the previous studies, we used a Stewart parallel platform with an integrated force platform that enabled the subjects to actively control the orientation of the platform by shifting their centre of mass position. In contrast to the previous studies where the muscular responses had no effect on the motion of the subject and were in some sense isometric responses, our reported muscular responses result in the motion of the subject's body and are therefore a better approximation to the real-world situations. Using polar diagrams, we show the responses of four muscle groups during the stretch and proprioceptive reflex and the muscular responses based on the visual stimuli. We also showed the effectiveness of the muscles to counter the perturbations in different directions. The results show that the perturbations in anterior-posterior direction were compensated more efficiently than the perturbations in medial-lateral direction.
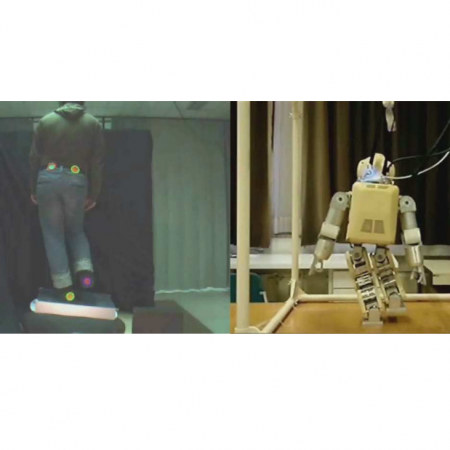
Babič, Jan; Hajdinjak, Blaž; Oztop, Erhan
Robot Skill Synthesis Through Human Visuo-Motor Learning - Humanoid Robot Statically-stable Reaching and In-place Stepping Proceedings Article
In: Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pp. 212–215, SciTePress - Science and and Technology Publications, Funchal, 2010, ISBN: 978-989-8425-00-3.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Babic2010,
title = {Robot Skill Synthesis Through Human Visuo-Motor Learning - Humanoid Robot Statically-stable Reaching and In-place Stepping},
author = {Jan Babi\v{c} and Bla\v{z} Hajdinjak and Erhan Oztop},
url = {http://www.scitepress.org/DigitalLibrary/Link.aspx?doi=10.5220/0002937502120215},
doi = {10.5220/0002937502120215},
isbn = {978-989-8425-00-3},
year = {2010},
date = {2010-01-01},
booktitle = {Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics},
volume = {2},
pages = {212--215},
publisher = {SciTePress - Science and and Technology Publications},
address = {Funchal},
abstract = {To achieve a desirable motion of the humanoid robots we propose a framework for robot skill-synthesis that is based on human visuo-motor learning capacity. The basic idea is to consider the humanoid robot as a tool that is intuitively controlled by a human demonstrator. Once the effortless control of the humanoid robot has been achieved, the desired behavior of the humanoid robot is obtained through practice. The successful execution of the desired motion by the human demonstrator is afterwards used for the design of motion controllers that operate autonomously. In the paper we describe our idea by presenting a couple of robot skills obtained by the proposed framework.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
To achieve a desirable motion of the humanoid robots we propose a framework for robot skill-synthesis that is based on human visuo-motor learning capacity. The basic idea is to consider the humanoid robot as a tool that is intuitively controlled by a human demonstrator. Once the effortless control of the humanoid robot has been achieved, the desired behavior of the humanoid robot is obtained through practice. The successful execution of the desired motion by the human demonstrator is afterwards used for the design of motion controllers that operate autonomously. In the paper we describe our idea by presenting a couple of robot skills obtained by the proposed framework.
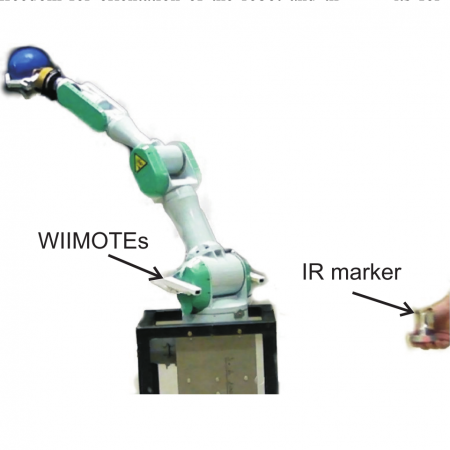
Gams, Andrej; Petrič, Tadej; Žlajpah, Leon; Ude, Aleš
Optimizing parameters of trajectory representation for movement generalization: robotic throwing Proceedings Article
In: 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010), pp. 161–166, IEEE, Budapest, 2010, ISBN: 978-1-4244-6885-0.
Abstract | BibTeX | Tags: Dynamic Motion, Optimal Control | Links:
@inproceedings{Gams2010,
title = {Optimizing parameters of trajectory representation for movement generalization: robotic throwing},
author = {Andrej Gams and Tadej Petri\v{c} and Leon \v{Z}lajpah and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/5524592/},
doi = {10.1109/RAAD.2010.5524592},
isbn = {978-1-4244-6885-0},
year = {2010},
date = {2010-01-01},
booktitle = {19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010)},
pages = {161--166},
publisher = {IEEE},
address = {Budapest},
abstract = {For effective use of learning by imitation with a robot, it is necessary that the robot can adapt to the current state of the external world. This paper describes an optimization approach that enables the generation of a new motion trajectory, which accomplishes the task in a given situation, based on a library of example movements. New movements are generated by applying statistical methods, where the current state of the world is utilized as query into the library. Dynamic movement primitives are employed as the underlying motor representation. The main contribution of this paper is the optimization of dynamic movement primitives with respect to the kernel function positions and over the entire set of demonstrated movements. We applied the algorithm to a robotic throwing task, where the location of the target is determined by a stereo vision system, which can detect infrared markers. The vision system uses two Nintendo WIIMOTEs for cameras.},
keywords = {Dynamic Motion, Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
For effective use of learning by imitation with a robot, it is necessary that the robot can adapt to the current state of the external world. This paper describes an optimization approach that enables the generation of a new motion trajectory, which accomplishes the task in a given situation, based on a library of example movements. New movements are generated by applying statistical methods, where the current state of the world is utilized as query into the library. Dynamic movement primitives are employed as the underlying motor representation. The main contribution of this paper is the optimization of dynamic movement primitives with respect to the kernel function positions and over the entire set of demonstrated movements. We applied the algorithm to a robotic throwing task, where the location of the target is determined by a stereo vision system, which can detect infrared markers. The vision system uses two Nintendo WIIMOTEs for cameras.
2009
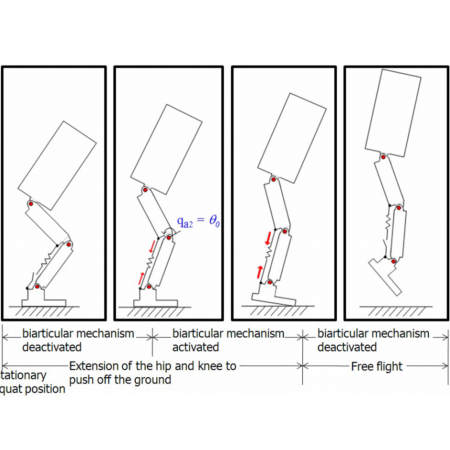
Babič, Jan; Lim, Bokman; Omrčen, Damir; Lenarčič, Jadran; Park, Frank C
A Biarticulated Robotic Leg for Jumping Movements: Theory and Experiments Journal Article
In: Journal of Mechanisms and Robotics, vol. 1, no. 1, pp. 011013, 2009, ISSN: 19424302.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@article{Babic2009,
title = {A Biarticulated Robotic Leg for Jumping Movements: Theory and Experiments},
author = {Jan Babi\v{c} and Bokman Lim and Damir Omr\v{c}en and Jadran Lenar\v{c}i\v{c} and Frank C Park},
url = {http://mechanismsrobotics.asmedigitalcollection.asme.org/article.aspx?articleid=1484860},
doi = {10.1115/1.2963028},
issn = {19424302},
year = {2009},
date = {2009-01-01},
journal = {Journal of Mechanisms and Robotics},
volume = {1},
number = {1},
pages = {011013},
abstract = {This paper investigates the extent to which biarticular actuation mechanisms\textemdashspring-driven redundant actuation schemes that extend over two joints, similar in function to biarticular muscles found in legged animals\textemdashimprove the performance of jumping and other fast explosive robot movements. Robust numerical optimization algorithms that take into account the complex dynamics of both the redundantly actuated system and frictional contact forces are developed. We then quantitatively evaluate the gains in vertical jumping vis-\`{a}-vis monoarticular and biarticular joint actuation schemes and examine the effects of spring stiffness and activation angle on overall jump performance. Both numerical simulations and experiments with a hardware prototype of a biarticular legged robot are reported.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {article}
}
This paper investigates the extent to which biarticular actuation mechanisms—spring-driven redundant actuation schemes that extend over two joints, similar in function to biarticular muscles found in legged animals—improve the performance of jumping and other fast explosive robot movements. Robust numerical optimization algorithms that take into account the complex dynamics of both the redundantly actuated system and frictional contact forces are developed. We then quantitatively evaluate the gains in vertical jumping vis-à-vis monoarticular and biarticular joint actuation schemes and examine the effects of spring stiffness and activation angle on overall jump performance. Both numerical simulations and experiments with a hardware prototype of a biarticular legged robot are reported.
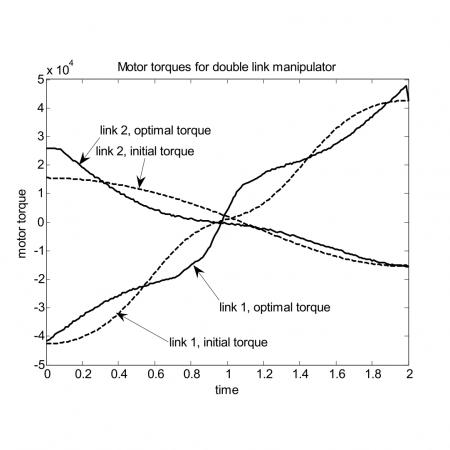
Lenart, Lado; Babič, Jan; Kušar, Janez
Direct use of functional gradients and linear programming in optimal control Proceedings Article
In: Štirn, Lidija Zadnik; Žerovnik, Janez; Drobne, Samo; Lisec, Anka (Ed.): Proceedings of the 10th International Symposium on Operational Research in Slovenia, SOR 2009, pp. 289–298, Nova Gorica, 2009, ISBN: 9789616165303.
Abstract | BibTeX | Tags: Optimal Control
@inproceedings{Lenart2009,
title = {Direct use of functional gradients and linear programming in optimal control},
author = {Lado Lenart and Jan Babi\v{c} and Janez Ku\v{s}ar},
editor = {Lidija {Zadnik \v{S}tirn} and Janez \v{Z}erovnik and Samo Drobne and Anka Lisec},
isbn = {9789616165303},
year = {2009},
date = {2009-01-01},
booktitle = {Proceedings of the 10th International Symposium on Operational Research in Slovenia, SOR 2009},
pages = {289--298},
address = {Nova Gorica},
abstract = {In the paper techniques for writing simple, transparent and effective programs for solving some problems in optimal control are presented. The calculation of functional gradients is the background for the fixed-time problems. The terminal function can be constant or else it has to be minimized. The direct algorithm is based on Euler discretization of a dynamic system and object functional. The discretized system is linearized. Then the best solution is searched using linear programming iteratively. The advantage of this algorithm is that the constraints in the control and state variables reduce the computational complexity of a non constraint problem. Typical examples illustrate the use of the described formalism. All solutions are validated with other methods.},
keywords = {Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
In the paper techniques for writing simple, transparent and effective programs for solving some problems in optimal control are presented. The calculation of functional gradients is the background for the fixed-time problems. The terminal function can be constant or else it has to be minimized. The direct algorithm is based on Euler discretization of a dynamic system and object functional. The discretized system is linearized. Then the best solution is searched using linear programming iteratively. The advantage of this algorithm is that the constraints in the control and state variables reduce the computational complexity of a non constraint problem. Typical examples illustrate the use of the described formalism. All solutions are validated with other methods.
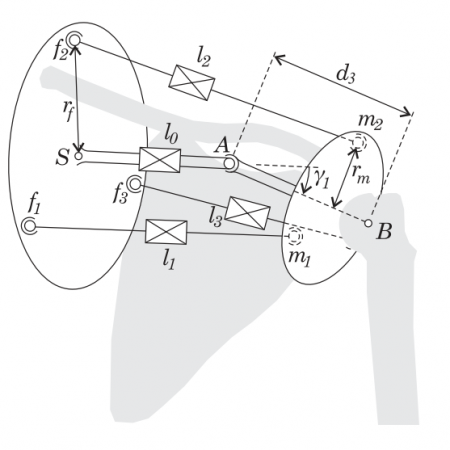
Lenarčič, Jadran; Žlajpah, Leon; Nemec, Bojan; Ude, Aleš; Babič, Jan; Omrčen, Damir; Mekjavić, Igor B
Recent Advances in Intelligent Robots at J. Stefan Institute Book Section
In: Rudas, Imre J; Fodor, János; Kacprzyk, Janusz (Ed.): Studies in Computational Intelligence, vol. 243, pp. 235–245, Springer, 2009, ISSN: 1860949X.
Abstract | BibTeX | Tags: | Links:
@incollection{Lenarcic2009,
title = {Recent Advances in Intelligent Robots at J. Stefan Institute},
author = {Jadran Lenar\v{c}i\v{c} and Leon \v{Z}lajpah and Bojan Nemec and Ale\v{s} Ude and Jan Babi\v{c} and Damir Omr\v{c}en and Igor B Mekjavi\'{c}},
editor = {Imre J Rudas and J\'{a}nos Fodor and Janusz Kacprzyk},
url = {http://link.springer.com/10.1007/978-3-642-03737-5_17},
doi = {10.1007/978-3-642-03737-5_17},
issn = {1860949X},
year = {2009},
date = {2009-01-01},
booktitle = {Studies in Computational Intelligence},
volume = {243},
pages = {235--245},
publisher = {Springer},
abstract = {This paper presents an overview of the recent robotics research and technology development of advanced robot systems at the J. Stefan Institute in Ljubljana, Slovenia. The presented projects integrate knowledge from different fields of robotics, automation and biocybernetics bringing into life completely new design and control concepts and approaches. Applications are seen in industrial and service robotics and in particular in the development of future humanoid robots.},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
This paper presents an overview of the recent robotics research and technology development of advanced robot systems at the J. Stefan Institute in Ljubljana, Slovenia. The presented projects integrate knowledge from different fields of robotics, automation and biocybernetics bringing into life completely new design and control concepts and approaches. Applications are seen in industrial and service robotics and in particular in the development of future humanoid robots.
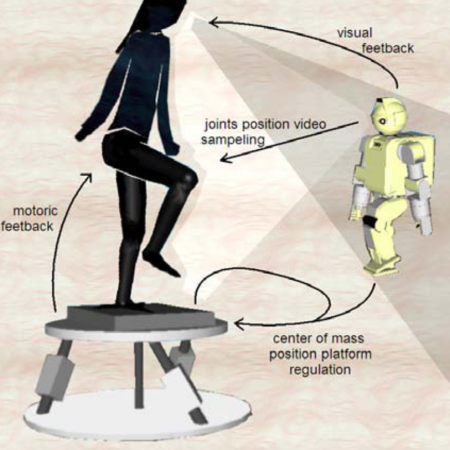
Hajdinjak, Blaž; Babič, Jan; Oztop, Erhan
Improving balance regulation in visuo-motor control for humanoid robots Proceedings Article
In: 2009 24th International Symposium on Computer and Information Sciences, pp. 405–408, IEEE, Guzelyut, 2009, ISBN: 978-1-4244-5021-3.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Sensorimotor Learning | Links:
@inproceedings{Hajdinjak2009,
title = {Improving balance regulation in visuo-motor control for humanoid robots},
author = {Bla\v{z} Hajdinjak and Jan Babi\v{c} and Erhan Oztop},
url = {http://ieeexplore.ieee.org/document/5291801/},
doi = {10.1109/ISCIS.2009.5291801},
isbn = {978-1-4244-5021-3},
year = {2009},
date = {2009-01-01},
booktitle = {2009 24th International Symposium on Computer and Information Sciences},
pages = {405--408},
publisher = {IEEE},
address = {Guzelyut},
abstract = {We know various strategies toward teaching and controlling humanoid robots. Some refer to direct joint or tip control and others use more intuitive approach such as mimicking human motion in a certain task. This kind of robot control, where a robot is considered a tool, controlled by a human demonstrator, is called visuo-motion control. In this paper, we present an improved approach to overcome a problem of balance in visuo-motor control of humanoid robots.},
keywords = {Human-in-the-Loop Control, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We know various strategies toward teaching and controlling humanoid robots. Some refer to direct joint or tip control and others use more intuitive approach such as mimicking human motion in a certain task. This kind of robot control, where a robot is considered a tool, controlled by a human demonstrator, is called visuo-motion control. In this paper, we present an improved approach to overcome a problem of balance in visuo-motor control of humanoid robots.
2008
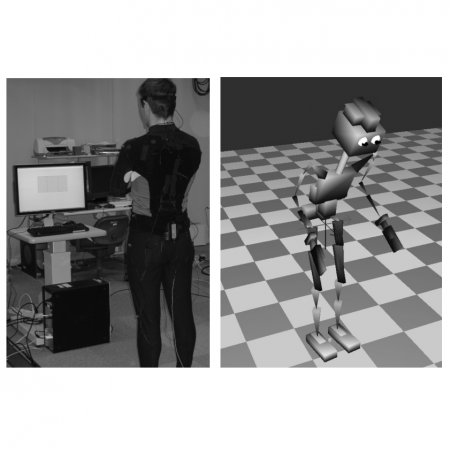
Oztop, Erhan; Babič, Jan; Hale, Joshua; Cheng, Gordon; Kawato, Mitsuo
From Biologically Realistic Imitation to Robot Teaching Via Human Motor Learning Book Section
In: Ishikawa, Masumi; Doya, Kenji; Miyamoto, Hiroyuki; Yamakawa, Takeshi (Ed.): Neural Information Processing, vol. 4985, pp. 214–221, Springer, Berlin, 2008, ISSN: 0302-9743.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning | Links:
@incollection{Oztop2008,
title = {From Biologically Realistic Imitation to Robot Teaching Via Human Motor Learning},
author = {Erhan Oztop and Jan Babi\v{c} and Joshua Hale and Gordon Cheng and Mitsuo Kawato},
editor = {Masumi Ishikawa and Kenji Doya and Hiroyuki Miyamoto and Takeshi Yamakawa},
url = {http://link.springer.com/10.1007/978-3-540-69162-4_23},
doi = {10.1007/978-3-540-69162-4_23},
issn = {0302-9743},
year = {2008},
date = {2008-01-01},
booktitle = {Neural Information Processing},
volume = {4985},
pages = {214--221},
publisher = {Springer},
address = {Berlin},
series = {Lecture Notes in Computer Science},
abstract = {Understanding mechanisms of imitation is a complex task in both human sciences and robotics. On the one hand, one can build systems that analyze observed motion, map it to their own body, and produce the motor commands to needed to achieve the inferred motion using engineering techniques. On the other hand, one can model the neural circuits involved in action observation and production in minute detail and hope that imitation will be an emergent property of the system. However if the goal is to build robots capable of skillful actions, midway solutions appear to be more appropriate. In this direction, we first introduce a conceptually biologically realistic neural network that can learn to imitate hand postures, either with the help of a teacher or by self-observation. Then we move to a paradigm we have recently proposed, where robot skill synthesis is achieved by exploiting the human capacity to learn novel control tasks.},
keywords = {Human-in-the-Loop Control, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
Understanding mechanisms of imitation is a complex task in both human sciences and robotics. On the one hand, one can build systems that analyze observed motion, map it to their own body, and produce the motor commands to needed to achieve the inferred motion using engineering techniques. On the other hand, one can model the neural circuits involved in action observation and production in minute detail and hope that imitation will be an emergent property of the system. However if the goal is to build robots capable of skillful actions, midway solutions appear to be more appropriate. In this direction, we first introduce a conceptually biologically realistic neural network that can learn to imitate hand postures, either with the help of a teacher or by self-observation. Then we move to a paradigm we have recently proposed, where robot skill synthesis is achieved by exploiting the human capacity to learn novel control tasks.
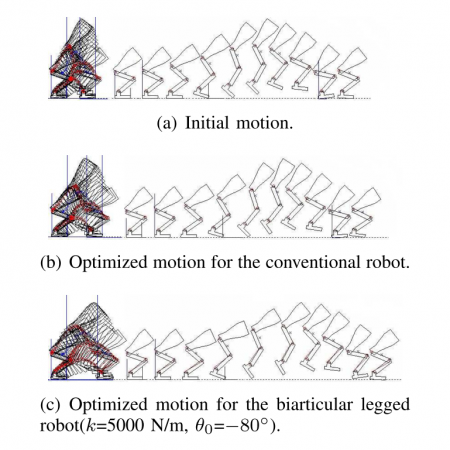
Lim, Bokman; Babič, Jan; Park, Frank C
Optimal jumps for biarticular legged robots Proceedings Article
In: 2008 IEEE International Conference on Robotics and Automation, pp. 226–231, IEEE, Pasadena, 2008, ISBN: 978-1-4244-1646-2.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@inproceedings{Lim2008,
title = {Optimal jumps for biarticular legged robots},
author = {Bokman Lim and Jan Babi\v{c} and Frank C Park},
url = {http://ieeexplore.ieee.org/document/4543213/},
doi = {10.1109/ROBOT.2008.4543213},
isbn = {978-1-4244-1646-2},
year = {2008},
date = {2008-01-01},
booktitle = {2008 IEEE International Conference on Robotics and Automation},
pages = {226--231},
publisher = {IEEE},
address = {Pasadena},
abstract = {This paper investigates the extent to which biar- ticular actuation mechanisms\textemdashantagonistic actuation schemes with spring stiffness that extend over two joints, similar in function to biarticular muscles found in legged animals\textemdash improve the performance of jumping and other fast explosive robot movements. Robust gradient-based optimization algo- rithms that take into account the dynamic properties and various contact and actuator constraints of biarticular systems are developed. We then quantitatively evaluate the gains in jumping vis-` a-vis conventional joint actuation schemes.We also examine the effects of biarticular link stiffness and link mass distributions on the jumping performance of the biarticular mechanism.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper investigates the extent to which biar- ticular actuation mechanisms—antagonistic actuation schemes with spring stiffness that extend over two joints, similar in function to biarticular muscles found in legged animals— improve the performance of jumping and other fast explosive robot movements. Robust gradient-based optimization algo- rithms that take into account the dynamic properties and various contact and actuator constraints of biarticular systems are developed. We then quantitatively evaluate the gains in jumping vis-` a-vis conventional joint actuation schemes.We also examine the effects of biarticular link stiffness and link mass distributions on the jumping performance of the biarticular mechanism.

Babič, Jan
Biarticular legged robot: Design and experiments Proceedings Article
In: 2008 IEEE International Conference on Robotics and Biomimetics, pp. 155–159, IEEE, Bangkok, 2008, ISBN: 978-1-4244-2678-2.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@inproceedings{Babic2008,
title = {Biarticular legged robot: Design and experiments},
author = {Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/4912996/},
doi = {10.1109/ROBIO.2009.4912996},
isbn = {978-1-4244-2678-2},
year = {2008},
date = {2008-01-01},
booktitle = {2008 IEEE International Conference on Robotics and Biomimetics},
pages = {155--159},
publisher = {IEEE},
address = {Bangkok},
abstract = {In the paper we describe the design process of a biarticular legged robotic system inspired by the anatomic properties or the human body and report the vertical jump experiments performed by the hardware prototype of the robot. We describe the starting points and the requirements that follow from the biomechanical properties of the human leg. Then we describe the CAD model of the robot and the construction of the real robotic system. Afterwards we show in detail the development of the dynamic model needed for simulation of the jump and for the control of the real robot. The vertical jump experiments are presented and analyzed in the last section.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {inproceedings}
}
In the paper we describe the design process of a biarticular legged robotic system inspired by the anatomic properties or the human body and report the vertical jump experiments performed by the hardware prototype of the robot. We describe the starting points and the requirements that follow from the biomechanical properties of the human leg. Then we describe the CAD model of the robot and the construction of the real robotic system. Afterwards we show in detail the development of the dynamic model needed for simulation of the jump and for the control of the real robot. The vertical jump experiments are presented and analyzed in the last section.
2007
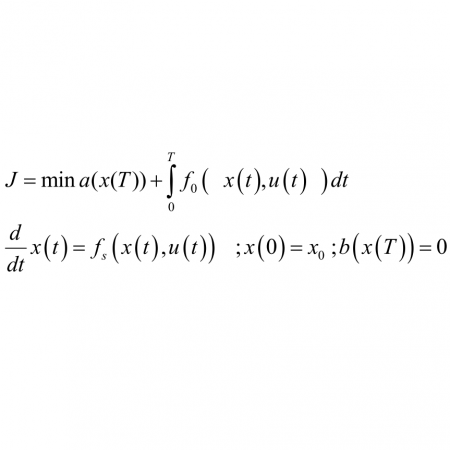
Lenart, Lado; Babič, Jan; Kušar, Janez
Some mixed algorithms in optimal control Proceedings Article
In: Štirn, Lidija Zadnik; Drobne, Samo (Ed.): Proceedings of the 8th International Symposium on Operational Research in Slovenia, SOR 2007, pp. 185–190, Nova Gorica, 2007.
Abstract | BibTeX | Tags: Optimal Control
@inproceedings{Lenart2007,
title = {Some mixed algorithms in optimal control},
author = {Lado Lenart and Jan Babi\v{c} and Janez Ku\v{s}ar},
editor = {Lidija {Zadnik \v{S}tirn} and Samo Drobne},
year = {2007},
date = {2007-01-01},
booktitle = {Proceedings of the 8th International Symposium on Operational Research in Slovenia, SOR 2007},
volume = {1},
pages = {185--190},
address = {Nova Gorica},
abstract = {The algorithms for optimal control system are generally split into two solution classes. The first class uses methods to directly cope with the Hamilton-Jacoby-Bellman equation (HJBE). The second class solves HJBE after transforming it into canonical system of ordinary differential equations (ODE) with split boundary values problem (BVP), also called dual point problem. Among a great number of direct methods the principles of collocation and Galerkins error estimation principle are highly interesting. The canonical equations seem to be practically the more standard way of solution, even if one has to solve two-point problem.},
keywords = {Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
The algorithms for optimal control system are generally split into two solution classes. The first class uses methods to directly cope with the Hamilton-Jacoby-Bellman equation (HJBE). The second class solves HJBE after transforming it into canonical system of ordinary differential equations (ODE) with split boundary values problem (BVP), also called dual point problem. Among a great number of direct methods the principles of collocation and Galerkins error estimation principle are highly interesting. The canonical equations seem to be practically the more standard way of solution, even if one has to solve two-point problem.
2006

Babič, Jan; Lenarčič, Jadran
Optimization of biarticular gastrocnemious muscle in humanoid jumping robot simulation Journal Article
In: International Journal of Humanoid Robotics, vol. 3, no. 2, pp. 219–234, 2006, ISSN: 0219-8436.
Abstract | BibTeX | Tags: Biarticular Muscle, Dynamic Motion, Robot Design | Links:
@article{Babic2006,
title = {Optimization of biarticular gastrocnemious muscle in humanoid jumping robot simulation},
author = {Jan Babi\v{c} and Jadran Lenar\v{c}i\v{c}},
url = {http://www.worldscientific.com/doi/abs/10.1142/S0219843606000722},
doi = {10.1142/S0219843606000722},
issn = {0219-8436},
year = {2006},
date = {2006-01-01},
journal = {International Journal of Humanoid Robotics},
volume = {3},
number = {2},
pages = {219--234},
abstract = {We propose a new human inspired structure of the lower extremity mechanism by which a humanoid robot will be able to efficiently perform fast movements such as running and jumping. We build a dynamic model of the humanoid robot which includes an elastic model of the biarticular muscle gastrocnemius and determine the role of the biarticular muscles and the elastic tendons in performing the vertical jump. We demonstrate that biarticular links contribute a great deal to the performance of the vertical jump. We also show that timing of the biarticular link activation and stiffness of the biarticular link influence the height of the jump considerably.},
keywords = {Biarticular Muscle, Dynamic Motion, Robot Design},
pubstate = {published},
tppubtype = {article}
}
We propose a new human inspired structure of the lower extremity mechanism by which a humanoid robot will be able to efficiently perform fast movements such as running and jumping. We build a dynamic model of the humanoid robot which includes an elastic model of the biarticular muscle gastrocnemius and determine the role of the biarticular muscles and the elastic tendons in performing the vertical jump. We demonstrate that biarticular links contribute a great deal to the performance of the vertical jump. We also show that timing of the biarticular link activation and stiffness of the biarticular link influence the height of the jump considerably.
2005
Lenart, Lado; Babič, Jan
Dynamic programming in control Proceedings Article
In: Štirn, Lidija Zadnik; Drobne, Samo (Ed.): Proceedings of the 8th International Symposium on Operational Research in Slovenia, SOR 2005, pp. 63–68, Nova Gorica, 2005, ISBN: 9616165208 | 9789616165204.
Abstract | BibTeX | Tags: Optimal Control
@inproceedings{Lenart2005,
title = {Dynamic programming in control},
author = {Lado Lenart and Jan Babi\v{c}},
editor = {Lidija {Zadnik \v{S}tirn} and Samo Drobne},
isbn = {9616165208 | 9789616165204},
year = {2005},
date = {2005-01-01},
booktitle = {Proceedings of the 8th International Symposium on Operational Research in Slovenia, SOR 2005},
pages = {63--68},
address = {Nova Gorica},
abstract = {The use of dynamic programming (DP) in control systems is based on a relation between the Hamilton-Jacoby-Bellman equation (HJBE) and the DP. Without calculating costate variables in canonical HJBE system equations, the iteration algorithm is shown to get solution in minimizing a series of control variables.},
keywords = {Optimal Control},
pubstate = {published},
tppubtype = {inproceedings}
}
The use of dynamic programming (DP) in control systems is based on a relation between the Hamilton-Jacoby-Bellman equation (HJBE) and the DP. Without calculating costate variables in canonical HJBE system equations, the iteration algorithm is shown to get solution in minimizing a series of control variables.
2004
Babič, Jan; Lenarčič, Jadran
In vivo determination of triceps surae muscle-tendon complex viscoelastic properties Journal Article
In: European Journal of Applied Physiology, vol. 92, no. 4-5, pp. 477–84, 2004, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Biarticular Muscle, Muscle Mechanics, Neuromusculoskeletal Modelling | Links:
@article{Babic2004,
title = {In vivo determination of triceps surae muscle-tendon complex viscoelastic properties},
author = {Jan Babi\v{c} and Jadran Lenar\v{c}i\v{c}},
url = {http://link.springer.com/10.1007/s00421-004-1107-4},
doi = {10.1007/s00421-004-1107-4},
issn = {1439-6319},
year = {2004},
date = {2004-01-01},
journal = {European Journal of Applied Physiology},
volume = {92},
number = {4-5},
pages = {477--84},
abstract = {Viscoelastic properties of muscles and tendons have an important influence on human motion performance. Proper determination of these properties is essential in the analysis and modelling of human motion dynamics. The purpose of our study was to develop a method for in vivo determination of the viscoelastic properties of the entire triceps surae muscle-tendon complex (MTC) including the gastrocnemius. Ten trained male subjects participated in this study. The measurement procedure consisted of two parts: soleus and Achilles tendon stiffness and viscosity were determined in the first part while the gastrocnemius stiffness and viscosity were determined in the second part. The measurement device and the procedure have been designed in such a manner that as few human body segments move as possible during the measurement. Thus, the measurement uncertainty due to the approximation of the properties of the human body segments was minimized. Triceps surae MTC viscoelastic properties of both legs were measured for each subject. There were no significant differences in viscoelastic coefficients for left and right lower extremities; however, there were noticeable differences between subjects. The soleus stiffness coefficient was greater than the gastrocnemius stiffness coefficient by 87.6 m(-1) in average. For all subjects, soleus viscosity was equal or greater than gastrocnemius viscosity. Values of viscoelastic parameters obtained by our method can be used in the analysis and modelling of human movement in situations where the knee joint is not necessarily flexed and there is coactivation of the soleus and the gastrocnemius.},
keywords = {Biarticular Muscle, Muscle Mechanics, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Viscoelastic properties of muscles and tendons have an important influence on human motion performance. Proper determination of these properties is essential in the analysis and modelling of human motion dynamics. The purpose of our study was to develop a method for in vivo determination of the viscoelastic properties of the entire triceps surae muscle-tendon complex (MTC) including the gastrocnemius. Ten trained male subjects participated in this study. The measurement procedure consisted of two parts: soleus and Achilles tendon stiffness and viscosity were determined in the first part while the gastrocnemius stiffness and viscosity were determined in the second part. The measurement device and the procedure have been designed in such a manner that as few human body segments move as possible during the measurement. Thus, the measurement uncertainty due to the approximation of the properties of the human body segments was minimized. Triceps surae MTC viscoelastic properties of both legs were measured for each subject. There were no significant differences in viscoelastic coefficients for left and right lower extremities; however, there were noticeable differences between subjects. The soleus stiffness coefficient was greater than the gastrocnemius stiffness coefficient by 87.6 m(-1) in average. For all subjects, soleus viscosity was equal or greater than gastrocnemius viscosity. Values of viscoelastic parameters obtained by our method can be used in the analysis and modelling of human movement in situations where the knee joint is not necessarily flexed and there is coactivation of the soleus and the gastrocnemius.
2001
Babič, Jan; Karčnik, Tomaž; Bajd, Tadej
Stability analysis of four-point walking Journal Article
In: Gait & Posture, vol. 14, no. 1, pp. 56–60, 2001, ISSN: 09666362.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Postural Balance | Links:
@article{Babic2001,
title = {Stability analysis of four-point walking},
author = {Jan Babi\v{c} and Toma\v{z} Kar\v{c}nik and Tadej Bajd},
url = {https://www.sciencedirect.com/science/article/pii/S0966636201001096},
doi = {10.1016/S0966-6362(01)00109-6},
issn = {09666362},
year = {2001},
date = {2001-01-01},
journal = {Gait \& Posture},
volume = {14},
number = {1},
pages = {56--60},
abstract = {The aim of the experiment reported here was to determine the static and dynamic stability of two-point stance phases when walking on hands and knees at different speeds. In addition, we defined the methods and predicted the consequences of including two-point stance phases into crutch assisted functional electrical stimulation (FES) walking. Crawling on hands and knees was performed at three speeds by five healthy male persons. With twelve joint-position markers placed on the subject, we determined two stability indices for every instant of gait. We analysed the peak values of these two indices during the two-point stance phases. The results indicate that we have to ensure the proper position of the centre of gravity to increase the speed of walking. To reach speeds, lower than 0.6 m/s, it is not necessary to include statically unstable phases. The shift of the centre of gravity towards and across the leading stability edge can result in getting into the dynamically unstable state. Considering the results we can effectively introduce two-point stance phases into crutch assisted FES walking and therefore increase the speed and energy effectiveness of walking},
keywords = {Neuromusculoskeletal Modelling, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
The aim of the experiment reported here was to determine the static and dynamic stability of two-point stance phases when walking on hands and knees at different speeds. In addition, we defined the methods and predicted the consequences of including two-point stance phases into crutch assisted functional electrical stimulation (FES) walking. Crawling on hands and knees was performed at three speeds by five healthy male persons. With twelve joint-position markers placed on the subject, we determined two stability indices for every instant of gait. We analysed the peak values of these two indices during the two-point stance phases. The results indicate that we have to ensure the proper position of the centre of gravity to increase the speed of walking. To reach speeds, lower than 0.6 m/s, it is not necessary to include statically unstable phases. The shift of the centre of gravity towards and across the leading stability edge can result in getting into the dynamically unstable state. Considering the results we can effectively introduce two-point stance phases into crutch assisted FES walking and therefore increase the speed and energy effectiveness of walking
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si