




2023
Dežman, Miha; Massardi, Stefano; Pinto-Fernandez, David; Grosu, Victor; Rodriguez-Guerrero, Carlos; Babič, Jan; Torricelli, Diego
A mechatronic leg replica to benchmark human–exoskeleton physical interactions Journal Article
In: Bioinspiration & Biomimetics, vol. 18, iss. 3, pp. 036009, 2023, ISSN: 1748-3182.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design | Links:
@article{dezman2023,
title = {A mechatronic leg replica to benchmark human\textendashexoskeleton physical interactions},
author = {Miha De\v{z}man and Stefano Massardi and David Pinto-Fernandez and Victor Grosu and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Diego Torricelli},
doi = {10.1088/1748-3190/accda8},
issn = {1748-3182},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Bioinspiration \& Biomimetics},
volume = {18},
issue = {3},
pages = {036009},
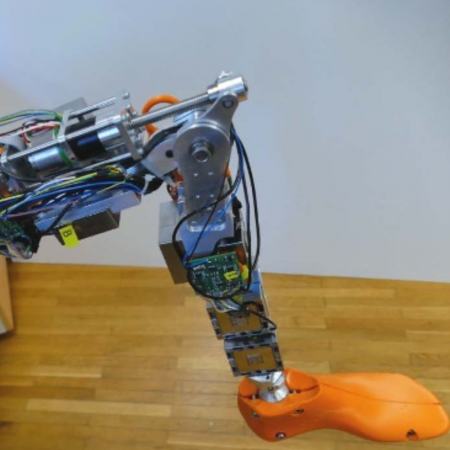
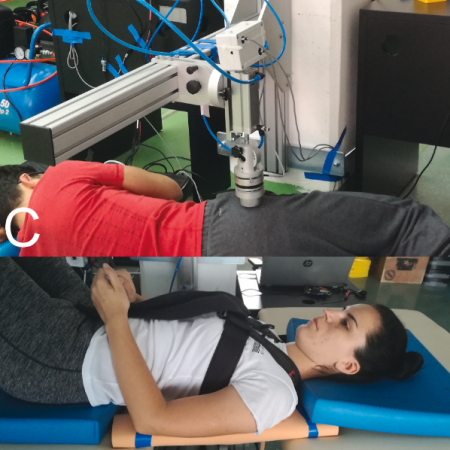
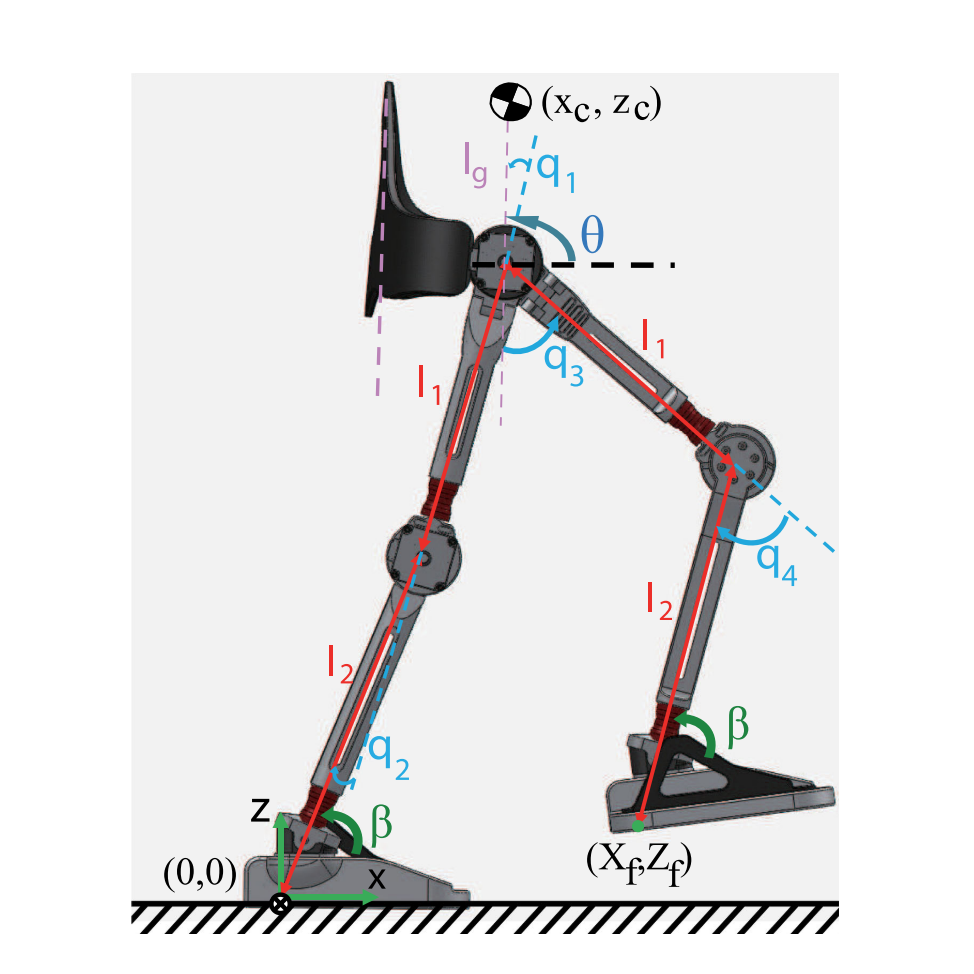
abstract = {Evaluating human\textendashexoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.},
keywords = {Exoskeleton Design and Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Robot Design},
pubstate = {published},
tppubtype = {article}
}
Evaluating human–exoskeleton interaction typically requires experiments with human subjects, which raises safety issues and entails time-consuming testing procedures. This paper presents a mechatronic replica of a human leg, which was designed to quantify physical interaction dynamics between exoskeletons and human limbs without the need for human testing. In the first part of this work, we present the mechanical, electronic, sensory system and software solutions integrated in our leg replica prototype. In the second part, we used the leg replica to test its interaction with two types of commercially available wearable devices, i.e. an active full leg exoskeleton and a passive knee orthosis. We ran basic test examples to demonstrate the functioning and benchmarking potential of the leg replica to assess the effects of joint misalignments on force transmission. The integrated force sensors embedded in the leg replica detected higher interaction forces in the misaligned scenario in comparison to the aligned one, in both active and passive modalities. The small standard deviation of force measurements across cycles demonstrates the potential of the leg replica as a standard test method for reproducible studies of human-exoskeleton physical interaction.
Díaz, María Alejandra; Voß, Matthias; Dillen, Arnau; Tassignon, Bruno; Flynn, Louis; Geeroms, Joost; Meeusen, Romain; Verstraten, Tom; Babič, Jan; Beckerle, Philipp; Pauw, Kevin De
Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human–Robot Interaction: A Systematic Review Journal Article
In: IEEE Transactions on Cybernetics, vol. 53, iss. 12, pp. 7483-7496, 2023, ISSN: 2168-2267.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Diaz2023b,
title = {Human-in-the-Loop Optimization of Wearable Robotic Devices to Improve Human\textendashRobot Interaction: A Systematic Review},
author = {Mar\'{i}a Alejandra D\'{i}az and Matthias Vo\ss and Arnau Dillen and Bruno Tassignon and Louis Flynn and Joost Geeroms and Romain Meeusen and Tom Verstraten and Jan Babi\v{c} and Philipp Beckerle and Kevin De Pauw},
url = {https://ieeexplore.ieee.org/document/9994612/},
doi = {10.1109/TCYB.2022.3224895},
issn = {2168-2267},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {IEEE Transactions on Cybernetics},
volume = {53},
issue = {12},
pages = {7483-7496},
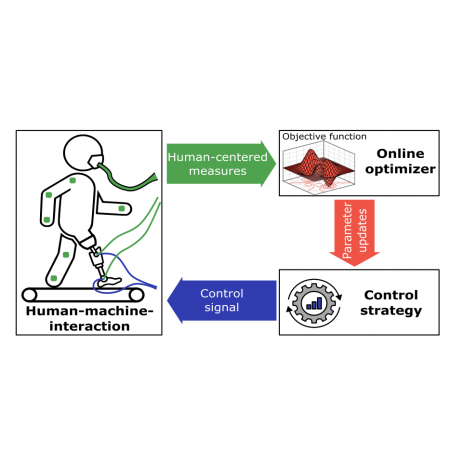
abstract = {This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human\textendashrobot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human\textendashmachine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.},
keywords = {Exoskeleton Design and Control, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
This article presents a systematic review on wear- able robotic devices that use human-in-the-loop optimization (HILO) strategies to improve human–robot interaction. A total of 46 HILO studies were identified and divided into upper and lower limb robotic devices. The main aspects from HILO were iden- tified, reviewed, and classified in four areas: 1) human–machine systems; 2) optimization methods; 3) control strategies; and 4) experimental protocols. A variety of objective functions (phys- iological, biomechanical, and subjective), optimization strategies, and optimized control parameters configurations used in differ- ent control strategies are presented and analyzed. An overview of experimental protocols is provided, including metrics, tasks, and conditions tested. Moreover, the relevance given to train- ing or adaptation periods was explored. We outline an HILO framework that includes current wearable robots, optimization strategies, objective functions, control strategies, and experimen- tal protocols. We conclude by highlighting current research gaps and defining future directions to improve the development of advanced HILO strategies in upper and lower limb wearable robots.
2022
Latella, Claudia; Tirupachuri, Yeshasvi; Tagliapietra, Luca; Rapetti, Lorenzo; Schirrmeister, Benjamin; Bornmann, Jonas; Gorjan, Dasa; Čamernik, Jernej; Maurice, Pauline; Fritzsche, Lars; Gonzalez-Vargas, Jose; Ivaldi, Serena; Babič, Jan; Nori, Francesco; Pucci, Daniele
Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 52, no. 5, pp. 1060–1068, 2022, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction | Links:
@article{Latella2022,
title = {Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton},
author = {Claudia Latella and Yeshasvi Tirupachuri and Luca Tagliapietra and Lorenzo Rapetti and Benjamin Schirrmeister and Jonas Bornmann and Dasa Gorjan and Jernej \v{C}amernik and Pauline Maurice and Lars Fritzsche and Jose Gonzalez-Vargas and Serena Ivaldi and Jan Babi\v{c} and Francesco Nori and Daniele Pucci},
url = {https://ieeexplore.ieee.org/document/9647004/},
doi = {10.1109/THMS.2021.3128892},
issn = {2168-2291},
year = {2022},
date = {2022-10-01},
urldate = {2022-10-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {52},
number = {5},
pages = {1060--1068},
publisher = {IEEE},
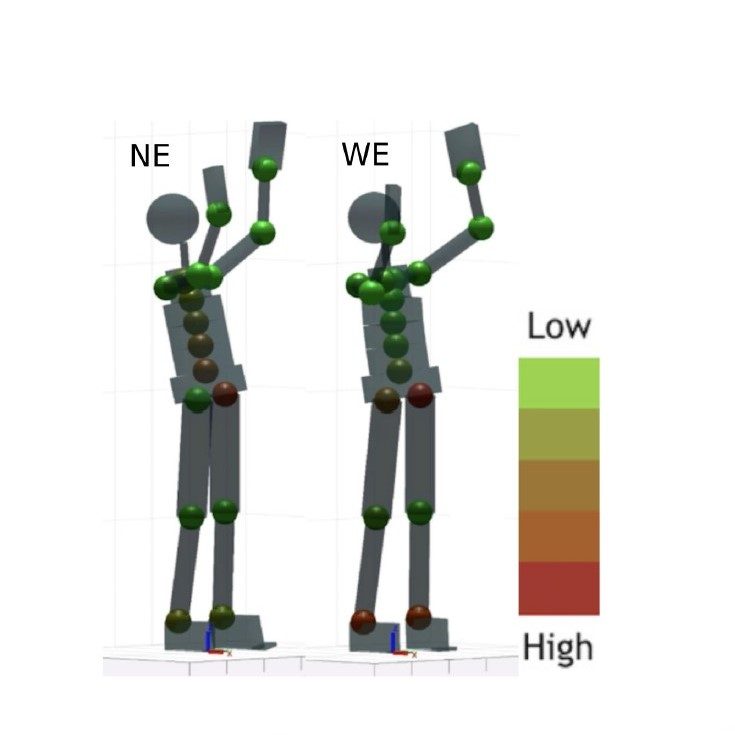
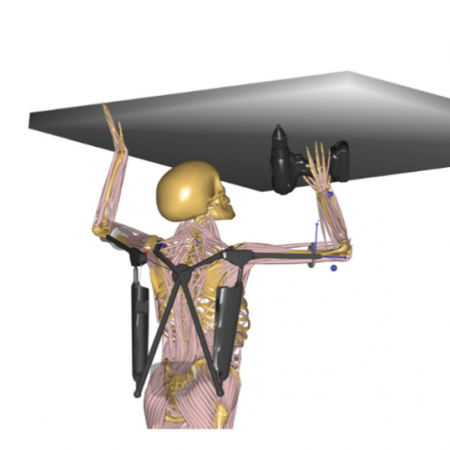
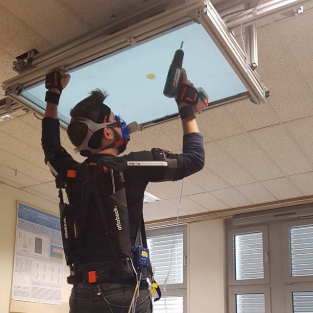
abstract = {Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.
Li, Yanan; Sena, Aran; Wang, Ziwei; Xing, Xueyan; Babič, Jan; Asseldonk, Edwin; Burdet, Etienne
A review on interaction control for contact robots through intent detection Journal Article
In: Progress in Biomedical Engineering, vol. 4, no. 3, pp. 032004, 2022, ISSN: 2516-1091.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Li2022,
title = {A review on interaction control for contact robots through intent detection},
author = {Yanan Li and Aran Sena and Ziwei Wang and Xueyan Xing and Jan Babi\v{c} and Edwin Asseldonk and Etienne Burdet},
url = {https://iopscience.iop.org/article/10.1088/2516-1091/ac8193},
doi = {10.1088/2516-1091/ac8193},
issn = {2516-1091},
year = {2022},
date = {2022-07-01},
urldate = {2022-07-01},
journal = {Progress in Biomedical Engineering},
volume = {4},
number = {3},
pages = {032004},
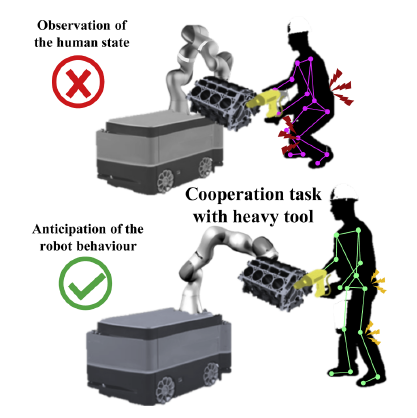
abstract = {Interaction control presents opportunities for contact robots physically interacting with their human user, such as assistance targeted to each human user, communication of goals to enable effective teamwork, and task-directed motion resistance in physical training and rehabilitation contexts. Here we review the burgeoning field of interaction control in the control theory and machine learning communities, by analysing the exchange of haptic information between the robot and its human user, and how they share the task effort. We first review the estimation and learning methods to predict the human user intent with the large uncertainty, variability and noise and limited observation of human motion. Based on this motion intent core, typical interaction control strategies are described using a homotopy of shared control parameters. Recent methods of haptic communication and game theory are then presented to consider the co-adaptation of human and robot control and yield versatile interactive control as observed between humans. Finally, the limitations of the presented state of the art are discussed and directions for future research are outlined.},
keywords = {Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Interaction control presents opportunities for contact robots physically interacting with their human user, such as assistance targeted to each human user, communication of goals to enable effective teamwork, and task-directed motion resistance in physical training and rehabilitation contexts. Here we review the burgeoning field of interaction control in the control theory and machine learning communities, by analysing the exchange of haptic information between the robot and its human user, and how they share the task effort. We first review the estimation and learning methods to predict the human user intent with the large uncertainty, variability and noise and limited observation of human motion. Based on this motion intent core, typical interaction control strategies are described using a homotopy of shared control parameters. Recent methods of haptic communication and game theory are then presented to consider the co-adaptation of human and robot control and yield versatile interactive control as observed between humans. Finally, the limitations of the presented state of the art are discussed and directions for future research are outlined.
Takahashi, Chie; Azad, Morteza; Rajasekaran, Vijaykumar; Babič, Jan; Mistry, Michael
Human Stiffness Perception and Learning in Interacting With Compliant Environments Journal Article
In: Frontiers in Neuroscience, vol. 16, no. June, pp. 1–13, 2022, ISSN: 1662-453X.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Takahashi2022,
title = {Human Stiffness Perception and Learning in Interacting With Compliant Environments},
author = {Chie Takahashi and Morteza Azad and Vijaykumar Rajasekaran and Jan Babi\v{c} and Michael Mistry},
url = {https://www.frontiersin.org/articles/10.3389/fnins.2022.841901/full},
doi = {10.3389/fnins.2022.841901},
issn = {1662-453X},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
journal = {Frontiers in Neuroscience},
volume = {16},
number = {June},
pages = {1--13},
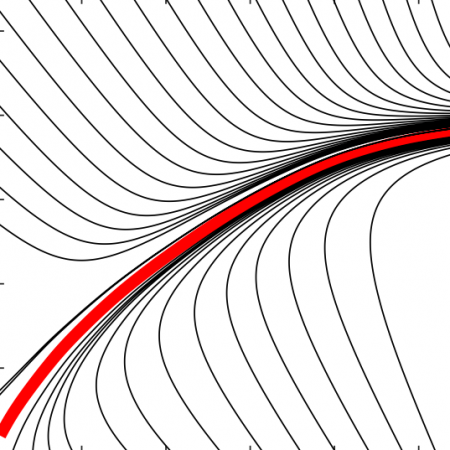
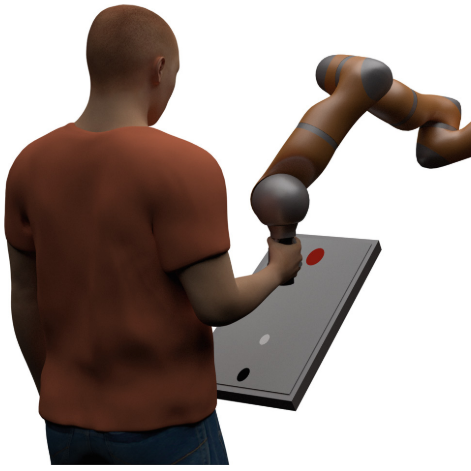
abstract = {Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.},
keywords = {Compliance and Impedance Control, Human Motor Control, Neuromusculoskeletal Modelling, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Humans are capable of adjusting their posture stably when interacting with a compliant surface. Their whole-body motion can be modulated in order to respond to the environment and reach to a stable state. In perceiving an uncertain external force, humans repetitively push it and learn how to produce a stable state. Research in human motor control has led to the hypothesis that the central nervous system integrates an internal model with sensory feedback in order to generate accurate movements. However, how the brain understands external force through exploration movements, and how humans accurately estimate a force from their experience of the force, is yet to be fully understood. To address these questions, we tested human behaviour in different stiffness profiles even though the force at the goal was the same. We generated one linear and two non-linear stiffness profiles, which required the same force at the target but different forces half-way to the target; we then measured the differences in the learning performance at the target and the differences in perception at the half-way point. Human subjects learned the stiffness profile through repetitive movements in reaching the target, and then indicated their estimation of half of the target value (position and force separately). This experimental design enabled us to probe how perception of the force experienced in different profiles affects the participants' estimations. We observed that the early parts of the learning curves were different for the three stiffness profiles. Secondly, the position estimates were accurate independent of the stiffness profile. The estimation in position was most likely influenced by the external environment rather than the profile itself. Interestingly, although visual information about the target had a large influence, we observed significant differences in accuracy of force estimation according to the stiffness profile.
Fritzsche, Lars; Gärtner, Christian; Spitzhirn, Michael; Galibarov, Pavel E; Damsgaard, Michael; Maurice, Pauline; Babič, Jan
Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results Proceedings Article
In: Black, Nancy L; Neumann, W Patrick; Noy, Ian (Ed.): Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), pp. 353–357, Springer International Publishing, Cham, 2022, ISBN: 978-3-030-74614-8.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction
@inproceedings{10.1007/978-3-030-74614-8_43,
title = {Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results},
author = {Lars Fritzsche and Christian G\"{a}rtner and Michael Spitzhirn and Pavel E Galibarov and Michael Damsgaard and Pauline Maurice and Jan Babi\v{c}},
editor = {Nancy L Black and W Patrick Neumann and Ian Noy},
isbn = {978-3-030-74614-8},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021)},
pages = {353--357},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.
2021
Jamšek, Marko; Kunavar, Tjaša; Bobek, Urban; Rueckert, Elmar; Babič, Jan
Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4417–4424, 2021, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction | Links:
@article{Jamsek2021,
title = {Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Urban Bobek and Elmar Rueckert and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/9387088/},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-07-01},
urldate = {2021-07-01},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {3},
pages = {4417--4424},
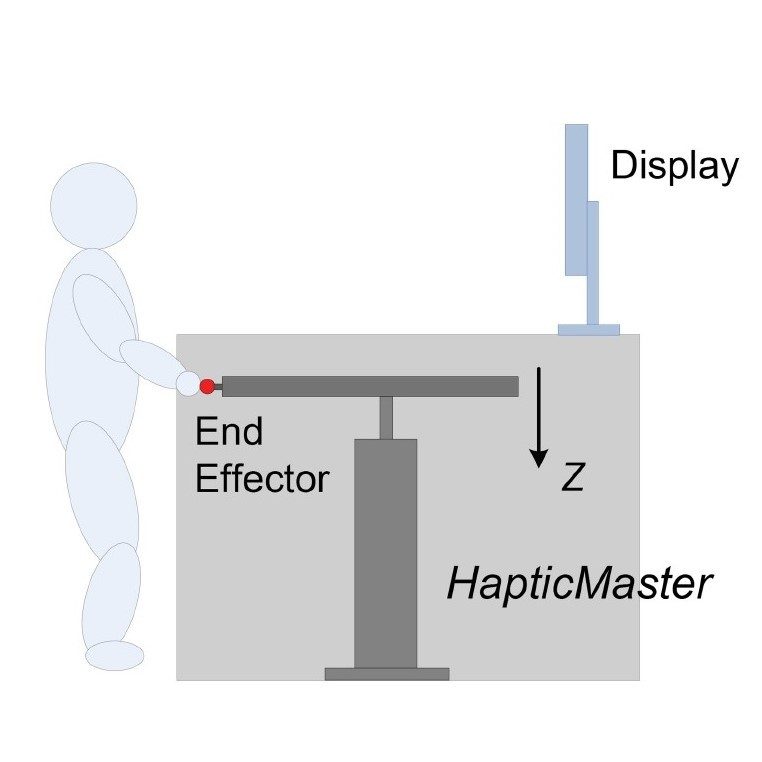
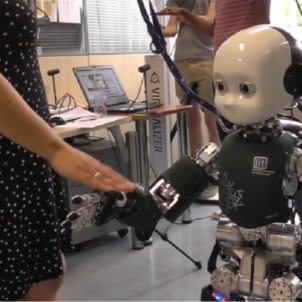
abstract = {There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.},
keywords = {Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.
Kim, Wansoo; Peternel, Luka; Lorenzini, Marta; Babič, Jan; Ajoudani, Arash
A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools Journal Article
In: Robotics and Computer-Integrated Manufacturing, vol. 68, pp. 102084, 2021, ISSN: 07365845.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Kim2021,
title = {A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools},
author = {Wansoo Kim and Luka Peternel and Marta Lorenzini and Jan Babi\v{c} and Arash Ajoudani},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0736584520302945},
doi = {10.1016/j.rcim.2020.102084},
issn = {07365845},
year = {2021},
date = {2021-04-01},
journal = {Robotics and Computer-Integrated Manufacturing},
volume = {68},
pages = {102084},
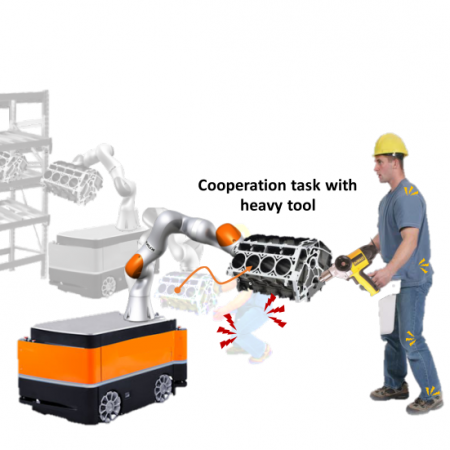
abstract = {In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.},
keywords = {Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.
Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
Human pressure tolerance and effects of different padding materials with implications for development of exoskeletons and similar devices Journal Article
In: Applied Ergonomics, vol. 93, 2021, ISSN: 18729126.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Kozinc2021,
title = {Human pressure tolerance and effects of different padding materials with implications for development of exoskeletons and similar devices},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.1016/j.apergo.2021.103379},
issn = {18729126},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Applied Ergonomics},
volume = {93},
abstract = {In this study, we assessed pressure tolerance in 16 healthy participants at the thigh, chest, and pelvic area, using different surfaces (1 cm2, 20 cm2 and different components, used in exoskeleton design), and the effects of different padding materials. Our results showed substantial variability in pressure tolerance among the participants, as well as lower pressure tolerance in females. Regarding the force applied with the exoskeleton components, male participants had higher discomfort threshold (230.3 ± 44.9 N compared to females (116.1 ± 24.6 N) in the chest area. For the applications with 20 cm2 surface, the males also showed higher pain threshold at the thigh (89.3 ± 41.8 N vs. 34.6 ± 27.2 N) and the pelvis (97.6 ± 37.0 N vs. 56.1 ± 29.5 N). All padding materials increased pressure tolerance for 10\textendash38% (p \< 0.001), but little differences between materials were observed.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this study, we assessed pressure tolerance in 16 healthy participants at the thigh, chest, and pelvic area, using different surfaces (1 cm2, 20 cm2 and different components, used in exoskeleton design), and the effects of different padding materials. Our results showed substantial variability in pressure tolerance among the participants, as well as lower pressure tolerance in females. Regarding the force applied with the exoskeleton components, male participants had higher discomfort threshold (230.3 ± 44.9 N compared to females (116.1 ± 24.6 N) in the chest area. For the applications with 20 cm2 surface, the males also showed higher pain threshold at the thigh (89.3 ± 41.8 N vs. 34.6 ± 27.2 N) and the pelvis (97.6 ± 37.0 N vs. 56.1 ± 29.5 N). All padding materials increased pressure tolerance for 10–38% (p < 0.001), but little differences between materials were observed.

Fritzsche, Lars; Galibarov, Pavel E.; Gartner, Christian; Bornmann, Jonas; Damsgaard, Michael; Wall, Rudolf; Schirrmeister, Benjamin; Gonzalez-Vargas, Jose; Pucci, Daniele; Maurice, Pauline; Ivaldi, Serena; Babič, Jan
Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System Journal Article
In: Wearable Technologies, vol. 2, 2021.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@article{Fritzsche2021,
title = {Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System},
author = {Lars Fritzsche and Pavel E. Galibarov and Christian Gartner and Jonas Bornmann and Michael Damsgaard and Rudolf Wall and Benjamin Schirrmeister and Jose Gonzalez-Vargas and Daniele Pucci and Pauline Maurice and Serena Ivaldi and Jan Babi\v{c}},
doi = {10.1017/wtc.2021.5},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Wearable Technologies},
volume = {2},
abstract = {IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.
2020
Elobaid, Mohamed; Hu, Yue; Romualdi, Giulio; Dafarra, Stefano; Babič, Jan; Pucci, Daniele
Telexistence and Teleoperation for Walking Humanoid Robots Book Section
In: Advances in Intelligent Systems and Computing, pp. 1106–1121, 2020, ISSN: 21945365.
Abstract | BibTeX | Tags: Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@incollection{Elobaid2020,
title = {Telexistence and Teleoperation for Walking Humanoid Robots},
author = {Mohamed Elobaid and Yue Hu and Giulio Romualdi and Stefano Dafarra and Jan Babi\v{c} and Daniele Pucci},
url = {http://link.springer.com/10.1007/978-3-030-29513-4_80 http://arxiv.org/abs/1809.01578 http://dx.doi.org/10.1007/978-3-030-29513-4_80},
doi = {10.1007/978-3-030-29513-4_80},
issn = {21945365},
year = {2020},
date = {2020-09-01},
booktitle = {Advances in Intelligent Systems and Computing},
pages = {1106--1121},
abstract = {This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.},
keywords = {Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {incollection}
}
This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.
Jamšek, Marko; Petrič, Tadej; Babič, Jan
Gaussian Mixture Models for Control of Quasi-Passive Spinal Exoskeletons Journal Article
In: Sensors, vol. 20, no. 9, pp. 2705, 2020, ISSN: 1424-8220.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Jamsek2020,
title = {Gaussian Mixture Models for Control of Quasi-Passive Spinal Exoskeletons},
author = {Marko Jam\v{s}ek and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {https://www.mdpi.com/711802 https://www.mdpi.com/1424-8220/20/9/2705},
doi = {10.3390/s20092705},
issn = {1424-8220},
year = {2020},
date = {2020-05-01},
urldate = {2020-05-01},
journal = {Sensors},
volume = {20},
number = {9},
pages = {2705},
publisher = {Multidisciplinary Digital Publishing Institute},
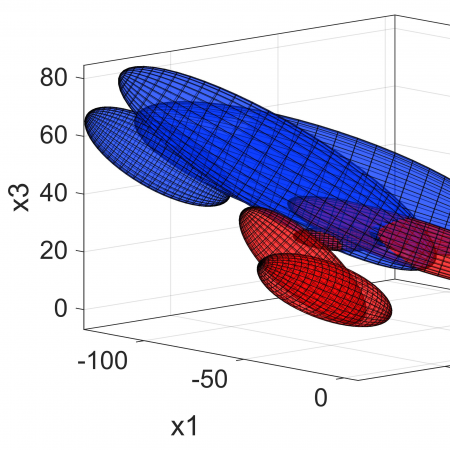
abstract = {Research and development of active and passive exoskeletons for preventing work related injuries has steadily increased in the last decade. Recently, new types of quasi-passive designs have been emerging. These exoskeletons use passive viscoelastic elements, such as springs and dampers, to provide support to the user, while using small actuators only to change the level of support or to disengage the passive elements. Control of such devices is still largely unexplored, especially the algorithms that predict the movement of the user, to take maximum advantage of the passive viscoelastic elements. To address this issue, we developed a new control scheme consisting of Gaussian mixture models (GMM) in combination with a state machine controller to identify and classify the movement of the user as early as possible and thus provide a timely control output for the quasi-passive spinal exoskeleton. In a leave-one-out cross-validation procedure, the overall accuracy for providing support to the user was 86 . 72 ± 0 . 86 % (mean ± s.d.) with a sensitivity and specificity of 97 . 46 ± 2 . 09 % and 83 . 15 ± 0 . 85 % respectively. The results of this study indicate that our approach is a promising tool for the control of quasi-passive spinal exoskeletons.},
keywords = {Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Research and development of active and passive exoskeletons for preventing work related injuries has steadily increased in the last decade. Recently, new types of quasi-passive designs have been emerging. These exoskeletons use passive viscoelastic elements, such as springs and dampers, to provide support to the user, while using small actuators only to change the level of support or to disengage the passive elements. Control of such devices is still largely unexplored, especially the algorithms that predict the movement of the user, to take maximum advantage of the passive viscoelastic elements. To address this issue, we developed a new control scheme consisting of Gaussian mixture models (GMM) in combination with a state machine controller to identify and classify the movement of the user as early as possible and thus provide a timely control output for the quasi-passive spinal exoskeleton. In a leave-one-out cross-validation procedure, the overall accuracy for providing support to the user was 86 . 72 ± 0 . 86 % (mean ± s.d.) with a sensitivity and specificity of 97 . 46 ± 2 . 09 % and 83 . 15 ± 0 . 85 % respectively. The results of this study indicate that our approach is a promising tool for the control of quasi-passive spinal exoskeletons.
Ugurlu, Barkan; Oshima, Hironori; Sariyildiz, Emre; Narikiyo, Tatsuo; Babič, Jan
Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 50, no. 2, pp. 144–153, 2020, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance | Links:
@article{Ugurlu2020,
title = {Active Compliance Control Reduces Upper Body Effort in Exoskeleton-Supported Walking},
author = {Barkan Ugurlu and Hironori Oshima and Emre Sariyildiz and Tatsuo Narikiyo and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8960446/},
doi = {10.1109/THMS.2019.2961969},
issn = {2168-2291},
year = {2020},
date = {2020-04-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {50},
number = {2},
pages = {144--153},
abstract = {This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.},
keywords = {Compliance and Impedance Control, Exoskeleton Design and Control, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
This article presents a locomotion controller for lower limb exoskeletons so as to enable the combined robot and user system to exhibit compliant walking characteristics when interacting with the environment. This is of critical importance to reduce the excessive ground reaction forces during the walking task execution with the aim of improved environmental interaction capabilities. In robot-aided walking support for paraplegics, the user has to actively use his/her upper limbs via crutches to ensure overall balance. By virtue of this requisite, several issues may particularly arise during touchdown instants, e.g., upper body orientation fluctuates, shoulder joints are subject to excessive loading, and arms may need to exert extra forces to counterbalance these effects. In order to reduce the upper body effort via compliant locomotion, the controller is designed to manage the force/position tradeoff by using an admittance controller in each joint. For proof of concept, a series of exoskeleton-aided walking experiments were conducted with the participation of nine healthy volunteers, four of whom additionally walked on an irregular surface for further performance evaluation. The results suggest that the proposed locomotion controller is advantageous over conventional high-gain position tracking in decreasing undesired oscillatory torso motion and total arm force, adequately reducing the required upper body effort.
![Wearable Robots: Taking a Leap From the Lab to the Real World [From the Guest Editors]](http://nbr.ijs.si/wp-content/uploads/2020/09/Rodriguez-Guerrero2020_image.png)
Rodriguez-Guerrero, Carlos; Babič, Jan; Novak, Domen
Wearable Robots: Taking a Leap From the Lab to the Real World [From the Guest Editors] Journal Article
In: IEEE Robotics & Automation Magazine, vol. 27, no. 1, pp. 20–21, 2020, ISSN: 1070-9932.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Rodriguez-Guerrero2020,
title = {Wearable Robots: Taking a Leap From the Lab to the Real World [From the Guest Editors]},
author = {Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Domen Novak},
url = {https://ieeexplore.ieee.org/document/9040485/},
doi = {10.1109/MRA.2020.2967004},
issn = {1070-9932},
year = {2020},
date = {2020-03-01},
journal = {IEEE Robotics \& Automation Magazine},
volume = {27},
number = {1},
pages = {20--21},
abstract = {The articles present a mix of mechanical design, control algorithms, and human-subject evaluations, thus providing insights into all aspects of wearable robotics for a varied engineering audience.},
keywords = {Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
The articles present a mix of mechanical design, control algorithms, and human-subject evaluations, thus providing insights into all aspects of wearable robotics for a varied engineering audience.

Baltrusch, Saskia J; van Dieen, Jaap H; Koopman, Axel S; Naf, Matthias; Rodriguez-Guerrero, Carlos; Babič, Jan; Houdijk, Han
SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting Journal Article
In: European Journal of Applied Physiology, vol. 120, no. 2, pp. 401–412, 2020, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Baltrusch2020,
title = {SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting},
author = {Saskia J Baltrusch and Jaap H van Dieen and Axel S Koopman and Matthias Naf and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Han Houdijk},
url = {http://link.springer.com/10.1007/s00421-019-04284-6},
doi = {10.1007/s00421-019-04284-6},
issn = {1439-6319},
year = {2020},
date = {2020-02-01},
journal = {European Journal of Applied Physiology},
volume = {120},
number = {2},
pages = {401--412},
abstract = {Besides mechanical loading of the back, physiological strain is an important risk factor for low-back pain. Recently a passive exoskeleton (SPEXOR) has been developed to reduce loading on the low back. We aimed to assess the effect of this device on metabolic cost of repetitive lifting. To explain potential effects, we assessed kinematics, mechanical joint work, and back muscle activity. We recruited ten male employees, working in the luggage handling department of an airline company and having ample experience with lifting tasks at work. Metabolic cost, kinematics, mechanical joint work and muscle activity were measured during a 5-min repetitive lifting task. Participants had to lift and lower a box of 10 kg from ankle height with and without the exoskeleton. Metabolic cost was significantly reduced by 18 % when wearing the exoskeleton. Kinematics did not change significantly, while muscle activity decreased by up to 16 %. The exoskeleton took over 18\textendash25 % of joint work at the hip and L5S1 joints. However, due to large variation in individual responses, we did not find a significant reduction of joint work around the individual joints. Wearing the SPEXOR exoskeleton decreased metabolic cost and might, therefore, reduce fatigue development and contribute to prevention of low-back pain during repetitive lifting tasks. Reduced metabolic cost can be explained by the exoskeleton substituting part of muscle work at the hip and L5S1 joints and consequently decreasing required back muscle activity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Besides mechanical loading of the back, physiological strain is an important risk factor for low-back pain. Recently a passive exoskeleton (SPEXOR) has been developed to reduce loading on the low back. We aimed to assess the effect of this device on metabolic cost of repetitive lifting. To explain potential effects, we assessed kinematics, mechanical joint work, and back muscle activity. We recruited ten male employees, working in the luggage handling department of an airline company and having ample experience with lifting tasks at work. Metabolic cost, kinematics, mechanical joint work and muscle activity were measured during a 5-min repetitive lifting task. Participants had to lift and lower a box of 10 kg from ankle height with and without the exoskeleton. Metabolic cost was significantly reduced by 18 % when wearing the exoskeleton. Kinematics did not change significantly, while muscle activity decreased by up to 16 %. The exoskeleton took over 18–25 % of joint work at the hip and L5S1 joints. However, due to large variation in individual responses, we did not find a significant reduction of joint work around the individual joints. Wearing the SPEXOR exoskeleton decreased metabolic cost and might, therefore, reduce fatigue development and contribute to prevention of low-back pain during repetitive lifting tasks. Reduced metabolic cost can be explained by the exoskeleton substituting part of muscle work at the hip and L5S1 joints and consequently decreasing required back muscle activity.
Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Daniele; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 1, pp. 152–164, 2020, ISSN: 1534-4320.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance | Links:
@article{Maurice2020b,
title = {Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Daniele Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8856265/},
doi = {10.1109/TNSRE.2019.2945368},
issn = {1534-4320},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
volume = {28},
number = {1},
pages = {152--164},
address = {Nancy},
abstract = {Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.
Leskovar, Rebeka Koprivšek; Čamernik, Jernej; Petrič, Tadej
Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two Book Section
In: Mechanisms and Machine Science, vol. 84, pp. 199–207, 2020, ISSN: 22110992.
Abstract | BibTeX | Tags: Human Motor Control, Kinematics, Physical Human Robot Interaction | Links:
@incollection{KropivsekLeskovar2020,
title = {Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two},
author = {Rebeka Kopriv\v{s}ek Leskovar and Jernej \v{C}amernik and Tadej Petri\v{c}},
url = {http://link.springer.com/10.1007/978-3-030-48989-2_22},
doi = {10.1007/978-3-030-48989-2_22},
issn = {22110992},
year = {2020},
date = {2020-01-01},
booktitle = {Mechanisms and Machine Science},
volume = {84},
pages = {199--207},
abstract = {In this paper we examine physical collaboration between two individuals using a dual-arm robot as a haptic interface. First, we design a haptic controller based on a virtual dynamic model of the robot arms. Then, we analyse dyadic human-human collaboration with a reaching task on a 2D plane, where the distance and size of the target changed randomly from a pool of nine reachable positions and sizes. Each subject performed the task individually and linked through the guided robot arms with a virtual model to perform the same task in collaboration. We evaluated both, individual and collaborative performances, based on Fitts' law, which describes the relation between the speed of motion and its accuracy. The results show that the Fitts' law applies to both, individual and collaborative tasks, with their performance improving when in collaboration.},
keywords = {Human Motor Control, Kinematics, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {incollection}
}
In this paper we examine physical collaboration between two individuals using a dual-arm robot as a haptic interface. First, we design a haptic controller based on a virtual dynamic model of the robot arms. Then, we analyse dyadic human-human collaboration with a reaching task on a 2D plane, where the distance and size of the target changed randomly from a pool of nine reachable positions and sizes. Each subject performed the task individually and linked through the guided robot arms with a virtual model to perform the same task in collaboration. We evaluated both, individual and collaborative performances, based on Fitts' law, which describes the relation between the speed of motion and its accuracy. The results show that the Fitts' law applies to both, individual and collaborative tasks, with their performance improving when in collaboration.
2019

Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Danielle; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Evaluation of PAEXO, a novel passive exoskeleton for overhead work Journal Article
In: Computer Methods in Biomechanics and Biomedical Engineering, vol. 22, no. sup1, pp. S448–S450, 2019, ISSN: 1025-5842.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Maurice2019a,
title = {Evaluation of PAEXO, a novel passive exoskeleton for overhead work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Danielle Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://doi.org/10.1080/10255842.2020.1714977 https://www.tandfonline.com/doi/full/10.1080/10255842.2020.1714977},
doi = {10.1080/10255842.2020.1714977},
issn = {1025-5842},
year = {2019},
date = {2019-10-01},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
volume = {22},
number = {sup1},
pages = {S448--S450},
publisher = {Taylor \& Francis},
abstract = {Assessment of physical, physiological, and psycho-logical aspects in the lab study suggest that PAEXO is a promising solution to reduce shoulder WMSDs among overhead workers. An inverse dynamics ana- lysis is being conducted to estimate joint torques from whole-body kinematics and ground reaction force to complement the present assessment. Data collected during field-testing with industrial workers are currently analyzed to evaluate the impact of PAEXO on real end-users.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Assessment of physical, physiological, and psycho-logical aspects in the lab study suggest that PAEXO is a promising solution to reduce shoulder WMSDs among overhead workers. An inverse dynamics ana- lysis is being conducted to estimate joint torques from whole-body kinematics and ground reaction force to complement the present assessment. Data collected during field-testing with industrial workers are currently analyzed to evaluate the impact of PAEXO on real end-users.
2018

Romano, Francesco; Nava, Gabriele; Azad, Morteza; Camernik, Jernej; Dafarra, Stefano; Dermy, Oriane; Latella, Claudia; Lazzaroni, Maria; Lober, Ryan; Lorenzini, Marta; Pucci, Daniele; Sigaud, Olivier; Traversaro, Silvio; Babič, Jan; Ivaldi, Serena; Mistry, Michael; Padois, Vincent; Nori, Francesco
The CoDyCo Project Achievements and Beyond: Toward Human Aware Whole-Body Controllers for Physical Human Robot Interaction Journal Article
In: IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 516–523, 2018, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@article{Romano2018,
title = {The CoDyCo Project Achievements and Beyond: Toward Human Aware Whole-Body Controllers for Physical Human Robot Interaction},
author = {Francesco Romano and Gabriele Nava and Morteza Azad and Jernej Camernik and Stefano Dafarra and Oriane Dermy and Claudia Latella and Maria Lazzaroni and Ryan Lober and Marta Lorenzini and Daniele Pucci and Olivier Sigaud and Silvio Traversaro and Jan Babi\v{c} and Serena Ivaldi and Michael Mistry and Vincent Padois and Francesco Nori},
url = {http://ieeexplore.ieee.org/document/8093992/},
doi = {10.1109/LRA.2017.2768126},
issn = {2377-3766},
year = {2018},
date = {2018-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {3},
number = {1},
pages = {516--523},
abstract = {The success of robots in real-world environments is largely dependent on their ability to interact with both humans and said environment.The FP7 EU project CoDyCo focused on the latter of these two challenges by exploiting both rigid and compliant contacts dynamics in the robot control problem. Regarding the former, to properly manage interaction dynamics on the robot control side, an estimation of the human behaviors and intentions is necessary. In this letter, we present the building blocks of such a human-in-the-loop controller, and validate them in both simulation and on the iCub humanoid robot using a human\textendashrobot interaction scenario. In this scenario, a human assists the robot in standing up from being seated on a bench.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
The success of robots in real-world environments is largely dependent on their ability to interact with both humans and said environment.The FP7 EU project CoDyCo focused on the latter of these two challenges by exploiting both rigid and compliant contacts dynamics in the robot control problem. Regarding the former, to properly manage interaction dynamics on the robot control side, an estimation of the human behaviors and intentions is necessary. In this letter, we present the building blocks of such a human-in-the-loop controller, and validate them in both simulation and on the iCub humanoid robot using a human–robot interaction scenario. In this scenario, a human assists the robot in standing up from being seated on a bench.

Petrič, Tadej; Cevzar, Mišel; Babič, Jan
Shared Control for Human-Robot Cooperative Manipulation Tasks Book Section
In: Ferraresi, Carlo; Quaglia, Giuseppe (Ed.): Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017, pp. 787–796, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-61276-8.
Abstract | BibTeX | Tags: Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@incollection{Petric2018,
title = {Shared Control for Human-Robot Cooperative Manipulation Tasks},
author = {Tadej Petri\v{c} and Mi\v{s}el Cevzar and Jan Babi\v{c}},
editor = {Carlo Ferraresi and Giuseppe Quaglia},
url = {http://link.springer.com/10.1007/978-3-319-61276-8_83},
doi = {10.1007/978-3-319-61276-8_83},
isbn = {978-3-319-61276-8},
year = {2018},
date = {2018-01-01},
booktitle = {Advances in Service and Industrial Robotics: Proceedings of the 26th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2017},
pages = {787--796},
publisher = {Springer International Publishing},
address = {Cham},
abstract = {In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.},
keywords = {Human Performance Augmentation, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {incollection}
}
In the past decade many studies on human motor control have investigated how humans are moving their arms. In robotics, these studies were usually used as a foundation for human-robot cooperation tasks. Nonetheless, the gap between human motor control and robot control remains challenging. In this paper we investigated, how human proprioceptive abilities could enhance performance of cooperative manipulative tasks, where humans and robots are autonomous agents coupled through physical interaction. In such setups, the robot movements are usually accurate but without the proprioceptive capabilities observed in humans. On the contrary, humans have well developed proprioceptive capabilities, but their movement accuracy is highly dependent on the speed of movement. In this paper we proposed an approach where we exploited the speed-accuracy trade-off model of a human together with the robotic partner. In this way the performance can be improved in a human-robot cooperative setup. The performance was analyzed on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested the accuracy and efficiency of performing the task. The results show that the proposed approach can successfully estimate human behavior and successfully perform the task.
2017
Padois, Vincent; Ivaldi, Serena; Babič, Jan; Mistry, Michael; Peters, Jan; Nori, Francesco
Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project Journal Article
In: Robotics and Autonomous Systems, vol. 90, pp. 97–117, 2017, ISSN: 09218890.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Physical Human Robot Interaction | Links:
@article{Padois2017,
title = {Whole-body multi-contact motion in humans and humanoids: Advances of the CoDyCo European project},
author = {Vincent Padois and Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Jan Peters and Francesco Nori},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889016304845},
doi = {10.1016/j.robot.2016.08.017},
issn = {09218890},
year = {2017},
date = {2017-01-01},
journal = {Robotics and Autonomous Systems},
volume = {90},
pages = {97--117},
abstract = {Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, forthcoming robotic research needs to investigate the principles governing whole-body motion and coordination with contact dynamics. There is a need to investigate the principles of motion and coordination of physical interaction, including the aspects related to unpredictability. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement. Last but not least, theoretical results needs to be validated in real-world scenarios with humanoid robots engaged in whole-body goal-directed tasks. Robots should be capable of exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilising assistive physical interaction from humans. The work presented in this paper presents state-of-the-art in these domains as well as some recent advances made within the framework of the CoDyCo European project.},
keywords = {Compliance and Impedance Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, forthcoming robotic research needs to investigate the principles governing whole-body motion and coordination with contact dynamics. There is a need to investigate the principles of motion and coordination of physical interaction, including the aspects related to unpredictability. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement. Last but not least, theoretical results needs to be validated in real-world scenarios with humanoid robots engaged in whole-body goal-directed tasks. Robots should be capable of exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilising assistive physical interaction from humans. The work presented in this paper presents state-of-the-art in these domains as well as some recent advances made within the framework of the CoDyCo European project.
Peternel, Luka; Kim, Wansoo; Babič, Jan; Ajoudani, Arash
Towards ergonomic control of human-robot co-manipulation and handover Proceedings Article
In: 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), pp. 55–60, IEEE, Birmingham, 2017, ISBN: 978-1-5386-4678-6.
Abstract | BibTeX | Tags: Ergonomy, Physical Human Robot Interaction | Links:
@inproceedings{Peternel2017a,
title = {Towards ergonomic control of human-robot co-manipulation and handover},
author = {Luka Peternel and Wansoo Kim and Jan Babi\v{c} and Arash Ajoudani},
url = {http://ieeexplore.ieee.org/document/8239537/},
doi = {10.1109/HUMANOIDS.2017.8239537},
isbn = {978-1-5386-4678-6},
year = {2017},
date = {2017-01-01},
booktitle = {2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids)},
pages = {55--60},
publisher = {IEEE},
address = {Birmingham},
abstract = {In this paper, we propose a novel method for the control of human-robot co-manipulation that takes into account the ergonomic requirements for the human co-worker. The robot uses a whole-body dynamic model of the human to optimise for the position of the co-manipulation task in the workspace. In this configuration, the overloading joint torques, i.e. the effects of an external load in human body joints, are minimised. In addition, the optimisation process includes several constraints, such as human arm manipulability properties, to ensure that the human has a good manipulation capacity in the given configuration. The main advantage of this approach is that the robot can potentially help to reduce the work-related strain and increase the productivity of the human co-worker. In addition, the on-line estimation of the overloading joint torques does not require an external force plate or sensor insoles. We validated the proposed method with experiments in two co-manipulation tasks: human using a device to polish an object that is delivered by the robot and a human-robot object handover. The results show that the proposed method is successful in achieving the ergonomic conditions for the human during},
keywords = {Ergonomy, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper, we propose a novel method for the control of human-robot co-manipulation that takes into account the ergonomic requirements for the human co-worker. The robot uses a whole-body dynamic model of the human to optimise for the position of the co-manipulation task in the workspace. In this configuration, the overloading joint torques, i.e. the effects of an external load in human body joints, are minimised. In addition, the optimisation process includes several constraints, such as human arm manipulability properties, to ensure that the human has a good manipulation capacity in the given configuration. The main advantage of this approach is that the robot can potentially help to reduce the work-related strain and increase the productivity of the human co-worker. In addition, the on-line estimation of the overloading joint torques does not require an external force plate or sensor insoles. We validated the proposed method with experiments in two co-manipulation tasks: human using a device to polish an object that is delivered by the robot and a human-robot object handover. The results show that the proposed method is successful in achieving the ergonomic conditions for the human during
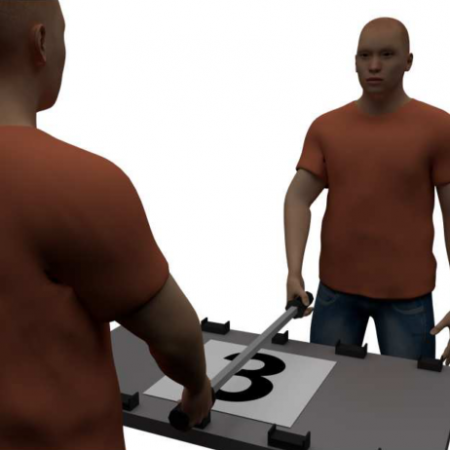
Petrič, Tadej; Cevzar, Mišel; Babič, Jan
Utilizing speed-accuracy trade-off models for human-robot coadaptation during cooperative groove fitting task Proceedings Article
In: 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), pp. 107–112, IEEE, Birmingham, 2017, ISBN: 978-1-5386-4678-6.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction | Links:
@inproceedings{Petric2017,
title = {Utilizing speed-accuracy trade-off models for human-robot coadaptation during cooperative groove fitting task},
author = {Tadej Petri\v{c} and Mi\v{s}el Cevzar and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/8239544/},
doi = {10.1109/HUMANOIDS.2017.8239544},
isbn = {978-1-5386-4678-6},
year = {2017},
date = {2017-01-01},
booktitle = {2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids)},
pages = {107--112},
publisher = {IEEE},
address = {Birmingham},
abstract = {What are the benefits of performing a task with other partners in a physically interactive manipulation task setups? By utilizing a novel human motor learning paradigm, where two individuals are aware of each other and their hands are physically connected through an object, we investigated how each partner adapts his/her motor behavior. We first analyzed performance of twenty subjects on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested efficiency and accuracy of performing the task in two different scenarios: a) one human alone \textendash twenty subjects; b) two humans cooperating \textendash ten pairs. We observed that the task performance during cooperative manipulation of an object does not follow any rules, i.e. either both partners get worse, or both get better, or one partner get and one get worse. By exploiting this properties, we propose a novel control algorithm for robots in physically interactive and cooperative human-robot setups, where the robot adapts to the performance of his/hers partner. This way, it allows the human partner to improve his/hers task performance. The results show that the proposed approach can successfully adapt and match motion of the human partner, and thereby enable the human partner to improve his/her motor skills. After adaption, the human coupled with a robotic partner, can perform the task faster.},
keywords = {Human Motor Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
What are the benefits of performing a task with other partners in a physically interactive manipulation task setups? By utilizing a novel human motor learning paradigm, where two individuals are aware of each other and their hands are physically connected through an object, we investigated how each partner adapts his/her motor behavior. We first analyzed performance of twenty subjects on a task where a long object, i.e. a pipe, needs to be manipulated into a groove with different tolerances. We tested efficiency and accuracy of performing the task in two different scenarios: a) one human alone – twenty subjects; b) two humans cooperating – ten pairs. We observed that the task performance during cooperative manipulation of an object does not follow any rules, i.e. either both partners get worse, or both get better, or one partner get and one get worse. By exploiting this properties, we propose a novel control algorithm for robots in physically interactive and cooperative human-robot setups, where the robot adapts to the performance of his/hers partner. This way, it allows the human partner to improve his/hers task performance. The results show that the proposed approach can successfully adapt and match motion of the human partner, and thereby enable the human partner to improve his/her motor skills. After adaption, the human coupled with a robotic partner, can perform the task faster.
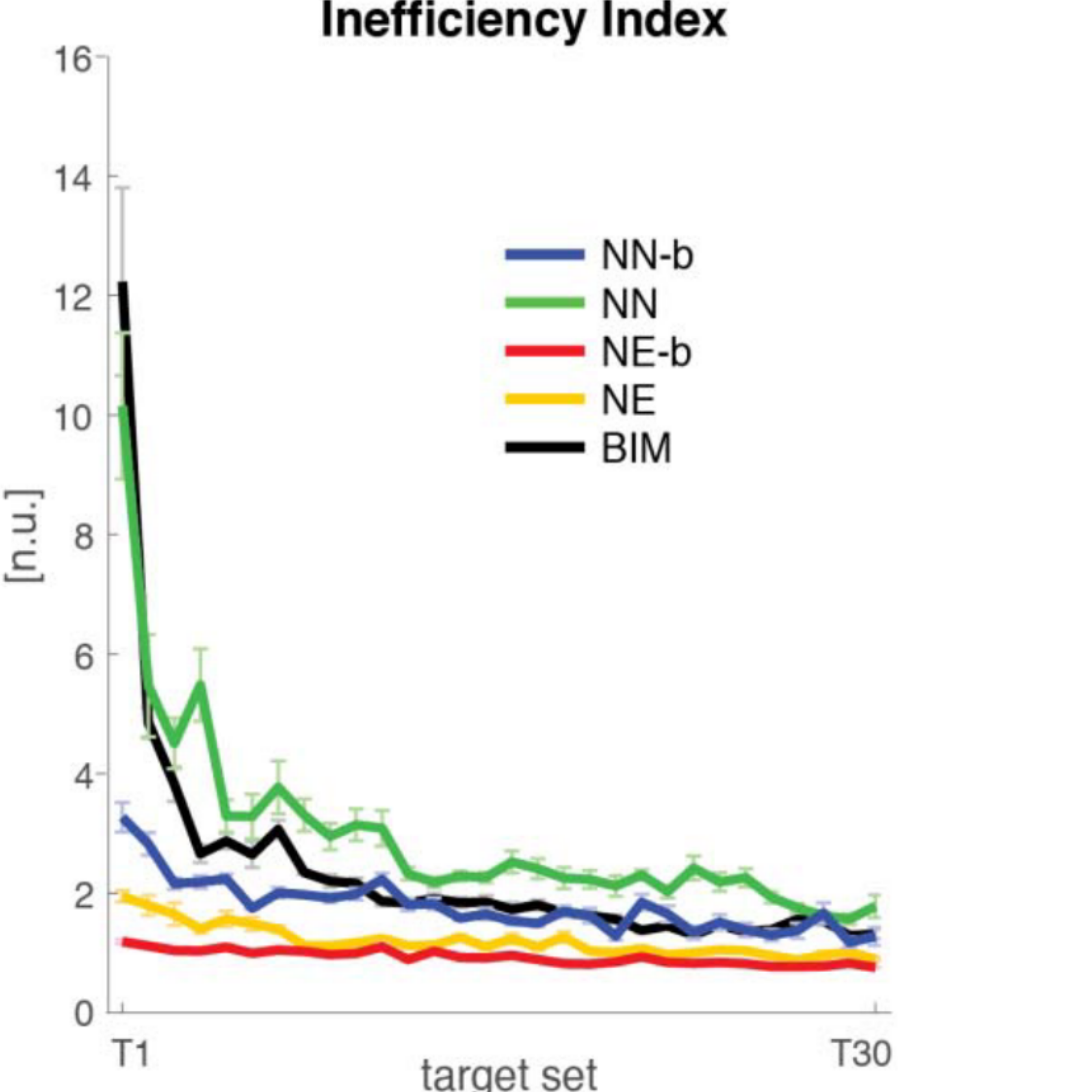
Avila-Mireles, Edwin Johnatan; Zenzeri, Jacopo; Squeri, Valentina; Morasso, Pietro; Santis, Dalia De
Skill learning and skill transfer mediated by cooperative haptic interaction Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, no. 7, pp. 832-843, 2017, ISSN: 15344320.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2017b,
title = {Skill learning and skill transfer mediated by cooperative haptic interaction},
author = {Edwin Johnatan Avila-Mireles and Jacopo Zenzeri and Valentina Squeri and Pietro Morasso and Dalia {De Santis}},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7921690; volume = 25},
doi = {10.1109/TNSRE.2017.2700839},
issn = {15344320},
year = {2017},
date = {2017-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
number = {7},
pages = {832-843},
abstract = {It is known that physical coupling between two subjects may be advantageous in joint tasks. However, little is known about how two people mutually exchange information to exploit the coupling. Therefore we adopted a reversed, novel perspective to the standard one that focuses on the ability of physically coupled subjects to adapt to cooperative contexts that require negotiating a common plan: we investigated how training in pairs on a novel task affects the development of motor skills of each of the interacting partners. The task involved reaching movements in an unstable dynamic environment using a bilateral non-linear elastic tool that could be used bimanually or dyadically. The main result is that training with an expert leads to the greatest performance in the joint task. However, the performance in the individual test is strongly affected by the initial skill level of the partner. Moreover, practicing with a peer rather than an expert appears to be more advantageous for a naive; and motor skills can be transferred to a bimanual context, after training with an expert, only if the non-expert subject had prior experience of the dynamics of the novel task.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
It is known that physical coupling between two subjects may be advantageous in joint tasks. However, little is known about how two people mutually exchange information to exploit the coupling. Therefore we adopted a reversed, novel perspective to the standard one that focuses on the ability of physically coupled subjects to adapt to cooperative contexts that require negotiating a common plan: we investigated how training in pairs on a novel task affects the development of motor skills of each of the interacting partners. The task involved reaching movements in an unstable dynamic environment using a bilateral non-linear elastic tool that could be used bimanually or dyadically. The main result is that training with an expert leads to the greatest performance in the joint task. However, the performance in the individual test is strongly affected by the initial skill level of the partner. Moreover, practicing with a peer rather than an expert appears to be more advantageous for a naive; and motor skills can be transferred to a bimanual context, after training with an expert, only if the non-expert subject had prior experience of the dynamics of the novel task.
2016
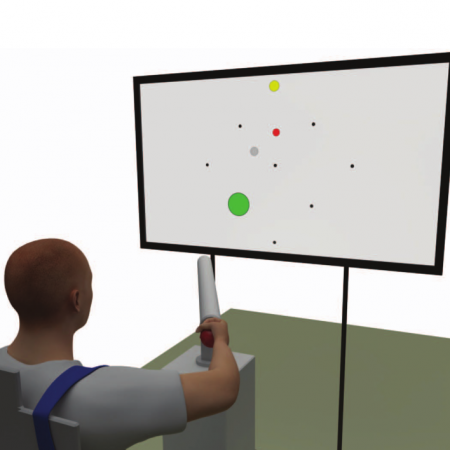
Petrič, Tadej; Goljat, Rok; Babič, Jan
Cooperative human-robot control based on Fitts' law Proceedings Article
In: 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), pp. 345–350, IEEE, Cancun, 2016, ISBN: 978-1-5090-4718-5.
Abstract | BibTeX | Tags: Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@inproceedings{Petric2016b,
title = {Cooperative human-robot control based on Fitts' law},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7803299/},
doi = {10.1109/HUMANOIDS.2016.7803299},
isbn = {978-1-5090-4718-5},
year = {2016},
date = {2016-01-01},
booktitle = {2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids)},
pages = {345--350},
publisher = {IEEE},
address = {Cancun},
abstract = {Many studies on human motor control have exam- ined how humans move the arms. A well known phenomenon known as the Fitts' law describes the trade-off between the speed of motion and its accuracy. In robotics, many studies were performed, and different control methods were proposed, for robots working in well structured environments. Neverthe- less, the cooperation between humans and robots remains a challenging task that is highly relevant for robots aiming to work together with humans in non-structured environments. In this paper we propose a novel method for on-line adap- tation of robotic trajectories, where humans and robots are autonomous agents coupled through physical interaction, for example through manipulated object. Within the proposed framework, the robot adapts to the human motion through the sensory feedback by taking into account the Fitts' law where the user specific behavior is estimated using a recursive least square updates. The movement trajectories are represented by the Dynamic Movement Primitives, where the adaptation relies on the Iterative Learning Controller framework. The proposed approach was evaluated by a cooperative human robot arm- reaching task on a plane. We tested the accuracy and efficiency of the proposed method, showed its relevance and demonstrated that the proposed approach fully adapts to the human motor control and maintains the desired accuracy of the movement.},
keywords = {Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Many studies on human motor control have exam- ined how humans move the arms. A well known phenomenon known as the Fitts' law describes the trade-off between the speed of motion and its accuracy. In robotics, many studies were performed, and different control methods were proposed, for robots working in well structured environments. Neverthe- less, the cooperation between humans and robots remains a challenging task that is highly relevant for robots aiming to work together with humans in non-structured environments. In this paper we propose a novel method for on-line adap- tation of robotic trajectories, where humans and robots are autonomous agents coupled through physical interaction, for example through manipulated object. Within the proposed framework, the robot adapts to the human motion through the sensory feedback by taking into account the Fitts' law where the user specific behavior is estimated using a recursive least square updates. The movement trajectories are represented by the Dynamic Movement Primitives, where the adaptation relies on the Iterative Learning Controller framework. The proposed approach was evaluated by a cooperative human robot arm- reaching task on a plane. We tested the accuracy and efficiency of the proposed method, showed its relevance and demonstrated that the proposed approach fully adapts to the human motor control and maintains the desired accuracy of the movement.
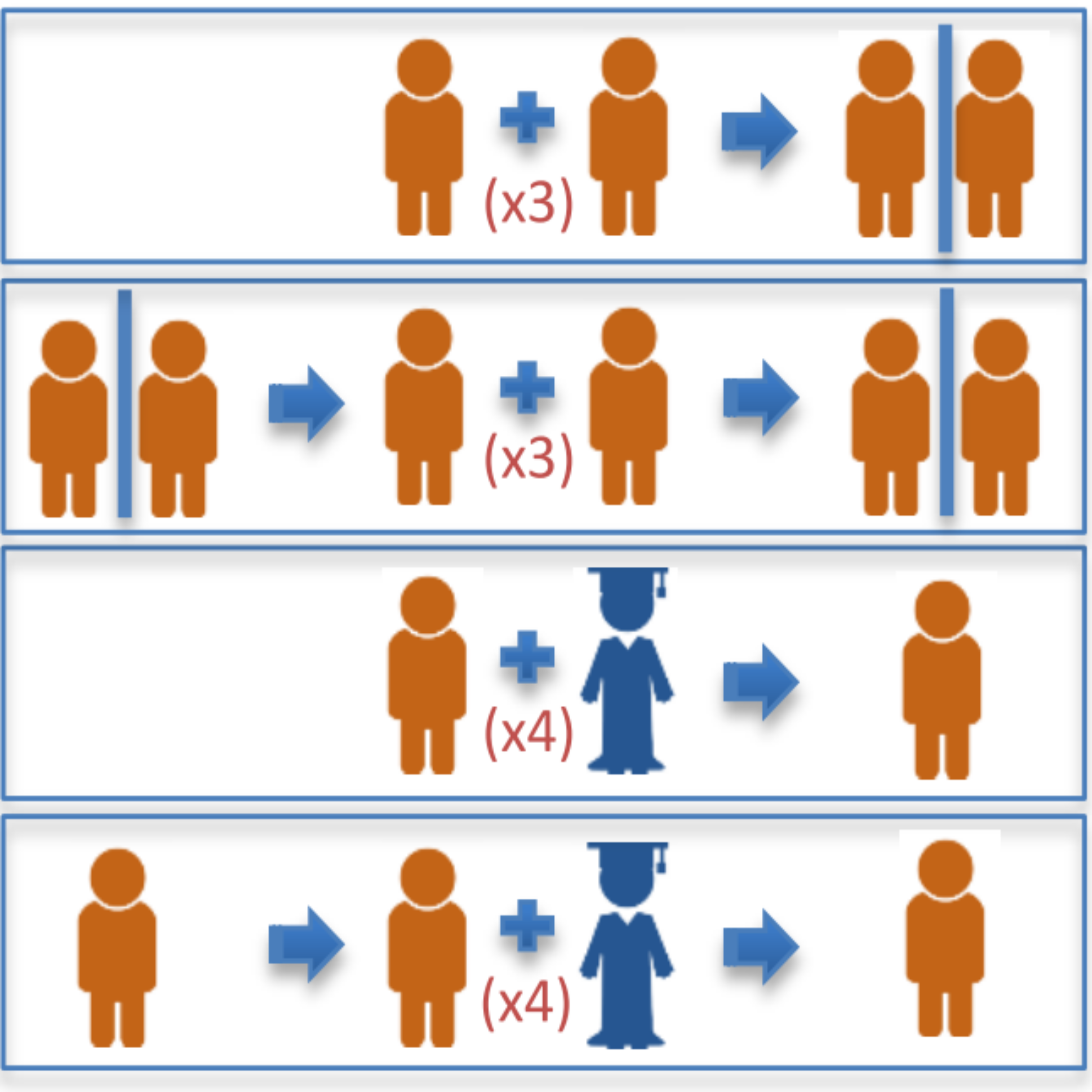
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Skill transfer and generalization after robot - mediated dyadic training Journal Article
In: Human Friendly Robotics, no. Human - Robot Interaction, pp. 1-6, 2016.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning
@article{Avila-Mireles2016h,
title = {Skill transfer and generalization after robot - mediated dyadic training},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
year = {2016},
date = {2016-01-01},
journal = {Human Friendly Robotics},
number = {Human - Robot Interaction},
pages = {1-6},
abstract = {Several studies have investigated how the interaction between two people or between a person and a robot can be harnessed to improve the skills of the partners. Indeed, solving a task as a dyad can lead the individual to perform better than by himself. The goal of this work is to investigate how the skill level of the partner and different interactive conditions affect learning of a novel task. In particular we considered the case of partners with different initial skill level (na\"{i}ve or experts) and the influence of prior individual practice. Twenty two subjects trained in a joint stabilization task for 4 days. On the last day we tested their ability to perform the same task individually. The results show that training with a skilled partner, despite bringing to a faster learning in the joint task, does not facilitate skill transfer in the absence of individual prior practice. This suggests that the physical coupling with an expert partner may interfere with learning due to the formation of a non-veridical internal representation of the task},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Several studies have investigated how the interaction between two people or between a person and a robot can be harnessed to improve the skills of the partners. Indeed, solving a task as a dyad can lead the individual to perform better than by himself. The goal of this work is to investigate how the skill level of the partner and different interactive conditions affect learning of a novel task. In particular we considered the case of partners with different initial skill level (naïve or experts) and the influence of prior individual practice. Twenty two subjects trained in a joint stabilization task for 4 days. On the last day we tested their ability to perform the same task individually. The results show that training with a skilled partner, despite bringing to a faster learning in the joint task, does not facilitate skill transfer in the absence of individual prior practice. This suggests that the physical coupling with an expert partner may interfere with learning due to the formation of a non-veridical internal representation of the task
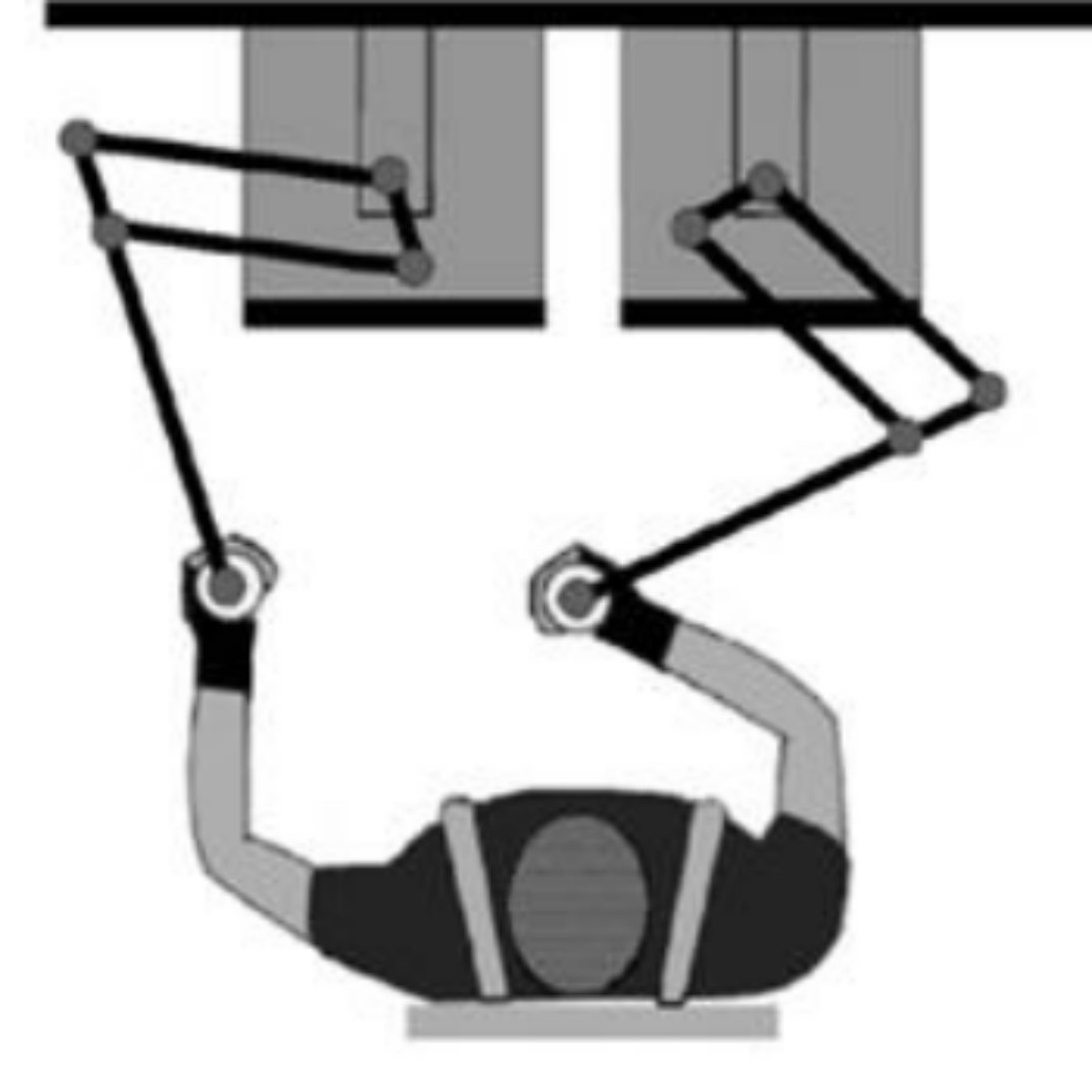
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Morasso, Pietro; Zenzeri, Jacopo
Transferring knowledge during dyadic interaction: The role of the expert in the learning process Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2016-Octob, pp. 2149-2152, 2016, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2016g,
title = {Transferring knowledge during dyadic interaction: The role of the expert in the learning process},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7591154},
doi = {10.1109/EMBC.2016.7591154},
issn = {1557170X},
year = {2016},
date = {2016-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2016-Octob},
pages = {2149-2152},
abstract = {Physical interaction between man and machines is increasing the interest of the research as well as the industrial community. It is known that physical coupling between active persons can be beneficial and increase the performance of the dyad compared to an individual. However, the factors that may result in performance benefits are still poorly understood. The aim of this work is to investigate how the different initial skill levels of the interacting partners influence the learning of a stabilization task. Twelve subjects, divided in two groups, trained in couples in a joint stabilization task. In the first group the couples were composed of two naive, while in the second a naive was trained together with an expert. Results show that training with an expert results in the greatest performance in the joint task. However, this benefit is not transferred to the individual when performing the same task bimanually.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Physical interaction between man and machines is increasing the interest of the research as well as the industrial community. It is known that physical coupling between active persons can be beneficial and increase the performance of the dyad compared to an individual. However, the factors that may result in performance benefits are still poorly understood. The aim of this work is to investigate how the different initial skill levels of the interacting partners influence the learning of a stabilization task. Twelve subjects, divided in two groups, trained in couples in a joint stabilization task. In the first group the couples were composed of two naive, while in the second a naive was trained together with an expert. Results show that training with an expert results in the greatest performance in the joint task. However, this benefit is not transferred to the individual when performing the same task bimanually.
2015
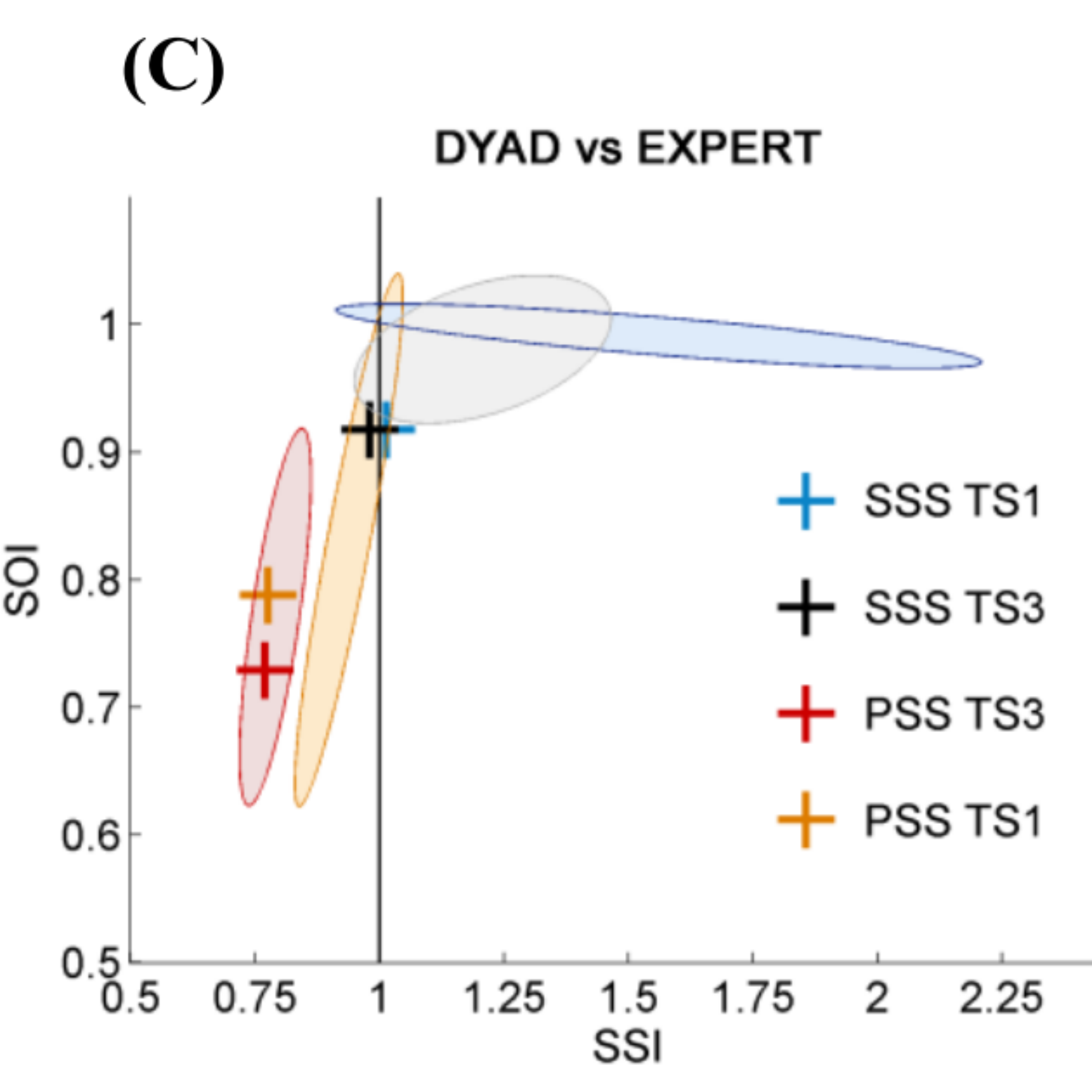
Santis, Dalia De; Avila-Mireles, Edwin Johnatan; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Dealing with instability in bimanual and collaborative tasks Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2015-Novem, no. i, pp. 1417-1420, 2015, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{DeSantis2015a,
title = {Dealing with instability in bimanual and collaborative tasks},
author = {Dalia {De Santis} and Edwin Johnatan Avila-Mireles and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7318635},
doi = {10.1109/EMBC.2015.7318635},
issn = {1557170X},
year = {2015},
date = {2015-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2015-Novem},
number = {i},
pages = {1417-1420},
publisher = {IEEE},
abstract = {In the context of unstable tasks, whenever the dynamics of the interaction are unknown, our ability to control an object depends on the predictability of the sensory feedback generated from the physical coupling at the interface with the object. In the case of physical human-human interaction, the haptic sensory feedback plays a primary role in the construction of a shared motor plan, being the channel for the mutual sharing of intentions. The present work addresses the issue of strategy selection in contexts in which instability is arising both from the environment, i.e. controlling a compliant object subject to nonlinear forces, and from the interaction with a partner, i.e. carrying out a bimanual balancing task in the presence of disturbing force-fields.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In the context of unstable tasks, whenever the dynamics of the interaction are unknown, our ability to control an object depends on the predictability of the sensory feedback generated from the physical coupling at the interface with the object. In the case of physical human-human interaction, the haptic sensory feedback plays a primary role in the construction of a shared motor plan, being the channel for the mutual sharing of intentions. The present work addresses the issue of strategy selection in contexts in which instability is arising both from the environment, i.e. controlling a compliant object subject to nonlinear forces, and from the interaction with a partner, i.e. carrying out a bimanual balancing task in the presence of disturbing force-fields.
Avila-Mireles, Edwin Johnatan; Ruiz-Sánchez, Francisco J; García-Salazar, Octavio
EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation Proceedings Article
In: 2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2015, 2015.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@inproceedings{Avila-Mireles2015bb,
title = {EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation},
author = {Edwin Johnatan Avila-Mireles and Francisco J Ruiz-S\'{a}nchez and Octavio Garc\'{i}a-Salazar},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7357984},
doi = {10.1109/ICEEE.2015.7357984},
year = {2015},
date = {2015-01-01},
booktitle = {2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2015},
abstract = {Robotic devices have been used successfully in assisted rehabilitation to increase, in continuity and intensity, the effects of neuromuscular stimulation. However, information resulting from the Patient-Robot interaction is not yet analyzed for diagnosis purposes. The neuromuscular reaction to a controlled stimulation, measured in terms of physiologic and mechanic variables, can be used to establish a common causal relation in healthy people to be used as a reference to evaluate the state of a patient, and thus, reinforce or reconsider its treatment. In this paper, we analyze the upper limb EMG patterns induced kinesthetically by uniform and cyclic trajectories using a haptic interface, and we show the existence of common patterns in healthy volunteers and how these patterns together with the mechanical response, can be used as a reference in diagnosis by means of a Similitude Index; we describe the EMG signals considered in this work, the experimental conditions to induce their activation patterns, and we discuss about some experimental results obtained with healthy volunteers and stroke patients.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Robotic devices have been used successfully in assisted rehabilitation to increase, in continuity and intensity, the effects of neuromuscular stimulation. However, information resulting from the Patient-Robot interaction is not yet analyzed for diagnosis purposes. The neuromuscular reaction to a controlled stimulation, measured in terms of physiologic and mechanic variables, can be used to establish a common causal relation in healthy people to be used as a reference to evaluate the state of a patient, and thus, reinforce or reconsider its treatment. In this paper, we analyze the upper limb EMG patterns induced kinesthetically by uniform and cyclic trajectories using a haptic interface, and we show the existence of common patterns in healthy volunteers and how these patterns together with the mechanical response, can be used as a reference in diagnosis by means of a Similitude Index; we describe the EMG signals considered in this work, the experimental conditions to induce their activation patterns, and we discuss about some experimental results obtained with healthy volunteers and stroke patients.
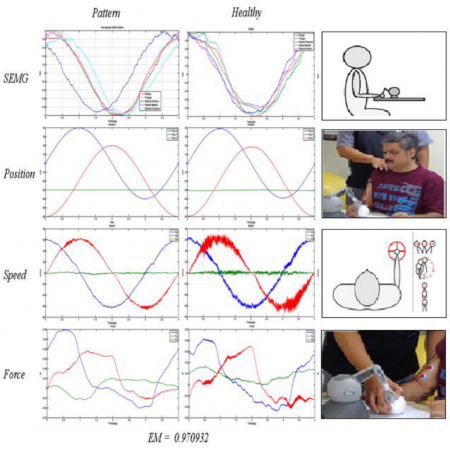
Avila-Mireles, Edwin Johnatan; Ruiz-sánchez, Francisco J
Haptically Induced EMG Patterns for Upper Limb Neuromuscular Evaluation Journal Article
In: Proceedings of 17th International Conference of the Engineering in Medicine and Biology Society, vol. 43, pp. 2012, 2015.
Abstract | BibTeX | Tags: Physical Human Robot Interaction, Sensorimotor Learning
@article{Avila-Mireles2015a,
title = {Haptically Induced EMG Patterns for Upper Limb Neuromuscular Evaluation},
author = {Edwin Johnatan Avila-Mireles and Francisco J Ruiz-s\'{a}nchez},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Proceedings of 17th International Conference of the Engineering in Medicine and Biology Society},
volume = {43},
pages = {2012},
abstract = {In this paper, we present the upper-limb sEMG signals induced by a kinesthetic stimulation, provided by a haptic device in a guiding mode, with cyclic movements on the transverse plane. We show the existence of common patterns of muscular activation in healthy volunteers describing the desired sequence of signals to produce an appropriated and coordinated movement. These patterns introduce physiological information about the etiology of the movement, and a mean to improve the assessment of the neuromuscular state in a patient.},
keywords = {Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
In this paper, we present the upper-limb sEMG signals induced by a kinesthetic stimulation, provided by a haptic device in a guiding mode, with cyclic movements on the transverse plane. We show the existence of common patterns of muscular activation in healthy volunteers describing the desired sequence of signals to produce an appropriated and coordinated movement. These patterns introduce physiological information about the etiology of the movement, and a mean to improve the assessment of the neuromuscular state in a patient.
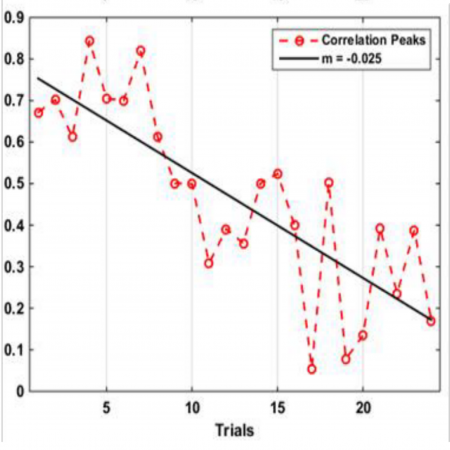
Avila-Mireles, Edwin Johnatan; Santis, Dalia De; Squeri, Valentina; Morasso, Pietro; Zenzeri, Jacopo
Motor control strategies in the bimanual stabilization of an unstable virtual tool Journal Article
In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, vol. 2015-Novem, pp. 3472-3475, 2015, ISSN: 1557170X.
Abstract | BibTeX | Tags: Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning | Links:
@article{Avila-Mireles2015b,
title = {Motor control strategies in the bimanual stabilization of an unstable virtual tool},
author = {Edwin Johnatan Avila-Mireles and Dalia {De Santis} and Valentina Squeri and Pietro Morasso and Jacopo Zenzeri},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=7319140},
doi = {10.1109/EMBC.2015.7319140},
issn = {1557170X},
year = {2015},
date = {2015-01-01},
urldate = {2015-01-01},
journal = {Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS},
volume = {2015-Novem},
pages = {3472-3475},
abstract = {Previous works have shown that, when dealing with instabilities in a bimanual manipulation paradigm, humans modulate the stiffness of the arms according to feedforward or feedback mechanisms as a function of the dynamics of the task. The aim of this work is to complement these results getting insights on how the CNS controls the muscles to achieve the stabilization goal in the two aforementioned control strategies. Surface EMG was recorded from 13 muscles of each arm and trunk while three expert subjects performed bimanual balancing of a virtual underactuated tool immersed in an unstable force-field. Results suggest the existence of an intermittent muscle ensemble recruitment that follows two distinct activation patterns, namely synchronous co-contractions and independent activations. The observed EMG patterns were independent of the motor control strategy applied in the task. These findings therefore suggest the existence of separate control strategies for the tool stabilization and the control of hand movements at the muscular level during a bimanual postural task.},
keywords = {Human Motor Control, Physical Human Robot Interaction, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
Previous works have shown that, when dealing with instabilities in a bimanual manipulation paradigm, humans modulate the stiffness of the arms according to feedforward or feedback mechanisms as a function of the dynamics of the task. The aim of this work is to complement these results getting insights on how the CNS controls the muscles to achieve the stabilization goal in the two aforementioned control strategies. Surface EMG was recorded from 13 muscles of each arm and trunk while three expert subjects performed bimanual balancing of a virtual underactuated tool immersed in an unstable force-field. Results suggest the existence of an intermittent muscle ensemble recruitment that follows two distinct activation patterns, namely synchronous co-contractions and independent activations. The observed EMG patterns were independent of the motor control strategy applied in the task. These findings therefore suggest the existence of separate control strategies for the tool stabilization and the control of hand movements at the muscular level during a bimanual postural task.
2013
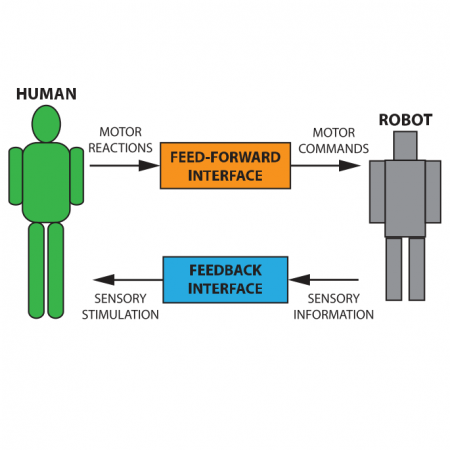
Peternel, Luka; Babič, Jan
Learning of compliant human–robot interaction using full-body haptic interface Journal Article
In: Advanced Robotics, vol. 27, no. 13, pp. 1003–1012, 2013, ISSN: 0169-1864.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Peternel2013b,
title = {Learning of compliant human\textendashrobot interaction using full-body haptic interface},
author = {Luka Peternel and Jan Babi\v{c}},
url = {http://www.tandfonline.com/doi/abs/10.1080/01691864.2013.808305},
doi = {10.1080/01691864.2013.808305},
issn = {0169-1864},
year = {2013},
date = {2013-09-01},
journal = {Advanced Robotics},
volume = {27},
number = {13},
pages = {1003--1012},
publisher = {Taylor \& Francis},
abstract = {We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.},
keywords = {Compliance and Impedance Control, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human. We present a novel approach where a human demonstrator can intuitively teach robot full-body skills. The aim of this approach is to exploit human sensorimotor ability to learn how to operate a humanoid robot in real time to perform tasks involving interaction with the environment. The human skill is then used to design a controller to autonomously control the robot. To provide the demonstrator with the robot?s state suitable for the full-body motion control, we developed a novel method that transforms robot?s sensory readings into feedback appropriate for the human. This method was implemented through a haptic interface that was designed to exert forces on the demonstrator?s centre of mass corresponding to the state of the robot?s centre of mass. To evaluate the feasibility of this approach, we performed an experiment where the human demonstrator taught the robot how to compliantly interact with another human. The results of the experiment showed that the proposed approach allowed the human to intuitively teach the robot how to compliantly interact with a human.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si