




2024

Tatarelli, Antonella; Babič, Jan; Casali, Carlo; Castiglia, Stefano Filippo; Chini, Giorgia; Ciancia, Rosanna; Cioffi, Ettore; Fiori, Lorenzo; Michieli, Mariagrazia; Montante, Barbara; Serrao, Mariano; Varrecchia, Tiwana; Ranavolo, Alberto
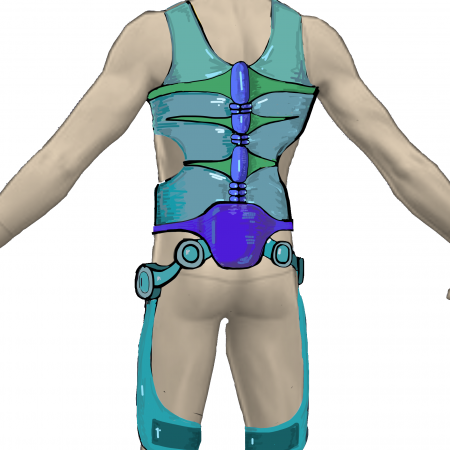
The Effect of a Wearable Assistive Trunk Exoskeleton on the Motor Coordination of People with Cerebellar Ataxia Journal Article
In: Applied Sciences, vol. 14, iss. 15, pp. 6537, 2024, ISSN: 2076-3417.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Postural Balance | Links:
@article{Tatarelli2024,
title = {The Effect of a Wearable Assistive Trunk Exoskeleton on the Motor Coordination of People with Cerebellar Ataxia},
author = {Antonella Tatarelli and Jan Babi\v{c} and Carlo Casali and Stefano Filippo Castiglia and Giorgia Chini and Rosanna Ciancia and Ettore Cioffi and Lorenzo Fiori and Mariagrazia Michieli and Barbara Montante and Mariano Serrao and Tiwana Varrecchia and Alberto Ranavolo},
doi = {10.3390/app14156537},
issn = {2076-3417},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Applied Sciences},
volume = {14},
issue = {15},
pages = {6537},
abstract = {The motor features of people with cerebellar ataxia suggest that locomotion is substantially impaired due to incoordination of the head, trunk, and limbs. The purpose of this study was to investigate how well a wearable soft passive exoskeleton worked for motor coordination in these patients. We used an optoelectronic system to examine the gait of nine ataxic people in three different conditions: without an exoskeleton and with two variants of the exoskeleton, one less and the other more flexible. We investigated kinematics using trunk ranges of motion, the displacement of the center of mass in the medio-lateral direction, and the parameters of mechanical energy consumption and recovery. Furthermore, we investigated the lower limb and trunk muscle coactivation. The results revealed a reduction of the medio-lateral sway of the center of mass, a more efficient behavior of the body in the antero-posterior direction, an energy expenditure optimization, a reduction of muscle coactivation and a better coordination between muscle activations. As a result, the findings laid the groundwork for the device to be used in the rehabilitation of individuals with cerebellar ataxia.},
keywords = {Ergonomy, Exoskeleton Design and Control, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
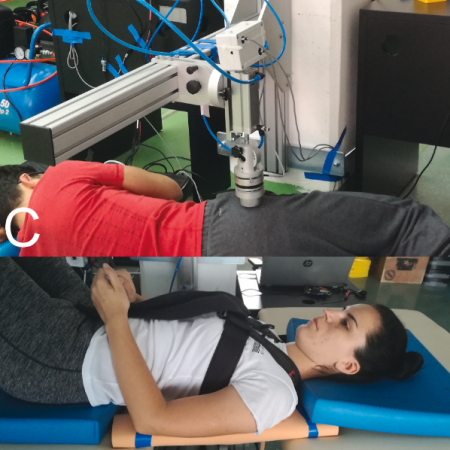
The motor features of people with cerebellar ataxia suggest that locomotion is substantially impaired due to incoordination of the head, trunk, and limbs. The purpose of this study was to investigate how well a wearable soft passive exoskeleton worked for motor coordination in these patients. We used an optoelectronic system to examine the gait of nine ataxic people in three different conditions: without an exoskeleton and with two variants of the exoskeleton, one less and the other more flexible. We investigated kinematics using trunk ranges of motion, the displacement of the center of mass in the medio-lateral direction, and the parameters of mechanical energy consumption and recovery. Furthermore, we investigated the lower limb and trunk muscle coactivation. The results revealed a reduction of the medio-lateral sway of the center of mass, a more efficient behavior of the body in the antero-posterior direction, an energy expenditure optimization, a reduction of muscle coactivation and a better coordination between muscle activations. As a result, the findings laid the groundwork for the device to be used in the rehabilitation of individuals with cerebellar ataxia.
2023
Massardi, Stefano; Pinto-Fernandez, David; Babič, Jan; Dežman, Miha; Trošt, Andrej; Grosu, Victor; Lefeber, Dirk; Rodriguez, Carlos; Bessler, Jule; Schaake, Leendert; Prange-Lasonder, Gerdienke; Veneman, Jan F.; Torricelli, Diego
Relevance of hazards in exoskeleton applications: a survey-based enquiry Journal Article
In: Journal of NeuroEngineering and Rehabilitation, vol. 20, iss. 1, pp. 68, 2023, ISSN: 1743-0003.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@article{Massardi2023,
title = {Relevance of hazards in exoskeleton applications: a survey-based enquiry},
author = {Stefano Massardi and David Pinto-Fernandez and Jan Babi\v{c} and Miha De\v{z}man and Andrej Tro\v{s}t and Victor Grosu and Dirk Lefeber and Carlos Rodriguez and Jule Bessler and Leendert Schaake and Gerdienke Prange-Lasonder and Jan F. Veneman and Diego Torricelli},
doi = {10.1186/s12984-023-01191-y},
issn = {1743-0003},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
journal = {Journal of NeuroEngineering and Rehabilitation},
volume = {20},
issue = {1},
pages = {68},
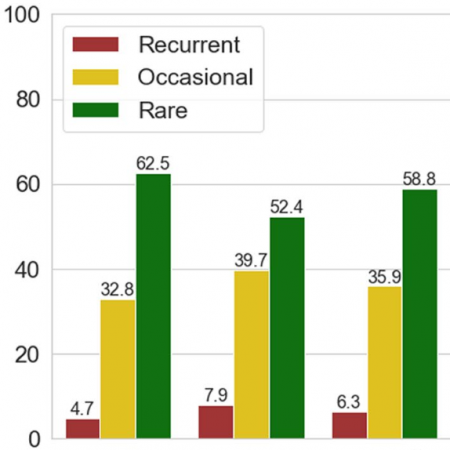
abstract = {Exoskeletons are becoming the reference technology for assistance and augmentation of human motor functions in a wide range of application domains. Unfortunately, the exponential growth of this sector has not been accompanied by a rigorous risk assessment (RA) process, which is necessary to identify the major aspects concerning the safety and impact of this new technology on humans. This situation may seriously hamper the market uptake of new products. This paper presents the results of a survey that was circulated to understand how hazards are considered by exoskeleton users, from research and industry perspectives. Our analysis aimed to identify the perceived occurrence and the impact of a sample of generic hazards, as well as to collect suggestions and general opinions from the respondents that can serve as a reference for more targeted RA. Our results identified a list of relevant hazards for exoskeletons. Among them, misalignments and unintended device motion were perceived as key aspects for exoskeletons’ safety. This survey aims to represent a first attempt in recording overall feedback from the community and contribute to future RAs and the identification of better mitigation strategies in the field.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {article}
}
Exoskeletons are becoming the reference technology for assistance and augmentation of human motor functions in a wide range of application domains. Unfortunately, the exponential growth of this sector has not been accompanied by a rigorous risk assessment (RA) process, which is necessary to identify the major aspects concerning the safety and impact of this new technology on humans. This situation may seriously hamper the market uptake of new products. This paper presents the results of a survey that was circulated to understand how hazards are considered by exoskeleton users, from research and industry perspectives. Our analysis aimed to identify the perceived occurrence and the impact of a sample of generic hazards, as well as to collect suggestions and general opinions from the respondents that can serve as a reference for more targeted RA. Our results identified a list of relevant hazards for exoskeletons. Among them, misalignments and unintended device motion were perceived as key aspects for exoskeletons’ safety. This survey aims to represent a first attempt in recording overall feedback from the community and contribute to future RAs and the identification of better mitigation strategies in the field.
2022
Latella, Claudia; Tirupachuri, Yeshasvi; Tagliapietra, Luca; Rapetti, Lorenzo; Schirrmeister, Benjamin; Bornmann, Jonas; Gorjan, Dasa; Čamernik, Jernej; Maurice, Pauline; Fritzsche, Lars; Gonzalez-Vargas, Jose; Ivaldi, Serena; Babič, Jan; Nori, Francesco; Pucci, Daniele
Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton Journal Article
In: IEEE Transactions on Human-Machine Systems, vol. 52, no. 5, pp. 1060–1068, 2022, ISSN: 2168-2291.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction | Links:
@article{Latella2022,
title = {Analysis of Human Whole-Body Joint Torques During Overhead Work With a Passive Exoskeleton},
author = {Claudia Latella and Yeshasvi Tirupachuri and Luca Tagliapietra and Lorenzo Rapetti and Benjamin Schirrmeister and Jonas Bornmann and Dasa Gorjan and Jernej \v{C}amernik and Pauline Maurice and Lars Fritzsche and Jose Gonzalez-Vargas and Serena Ivaldi and Jan Babi\v{c} and Francesco Nori and Daniele Pucci},
url = {https://ieeexplore.ieee.org/document/9647004/},
doi = {10.1109/THMS.2021.3128892},
issn = {2168-2291},
year = {2022},
date = {2022-10-01},
urldate = {2022-10-01},
journal = {IEEE Transactions on Human-Machine Systems},
volume = {52},
number = {5},
pages = {1060--1068},
publisher = {IEEE},
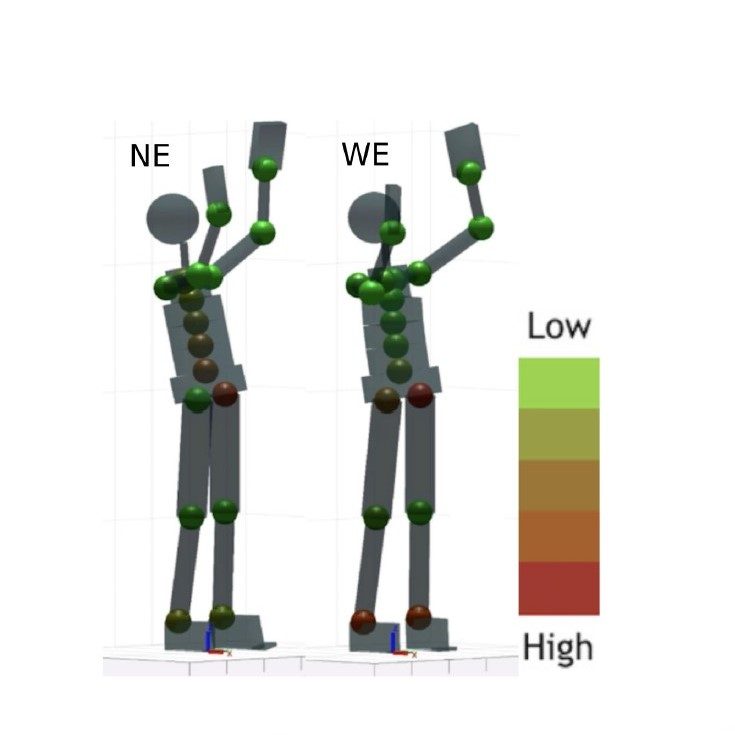
abstract = {Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
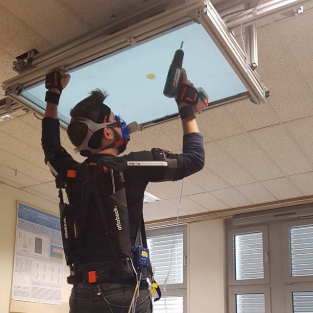
Overheadwork is classifiedas one of the major risk factors for the onset of shoulder work-related musculoskeletal disorders and muscle fatigue. Upper-limb exoskeletons can be used to assist workers during the execution of industrial overhead tasks to prevent such disorders. Twelve novice participants have been equipped with inertial and force/torque sensors to simultaneously estimate the whole-body kinematics and the joint torques (i.e., internal articular stress) by means of a probabilistic estimator, while performing an overhead task with a pointing tool. An evaluation has been performed to analyze the effect at the whole-body level by considering the conditions of wearing and not-wearing PAEXO, a passive exoskeleton for upper-limb support during overhead work. Results point out that PAEXO provides a reduction of the whole-body joint effort across the experimental task blocks (from 66% to 86%). Moreover, the analysis along with five different body areas shows that 1) the exoskeleton provides support at the human shoulders by reducing the joint effort at the targeted limbs, and 2) that part of the internal wrenches is intuitively transferred from the upper body to the thighs and legs, which is shown with an increment of the torques at the legs joints. The promising outcomes show that the probabilistic estimation algorithm can be used as a validation metric to quantitatively assess PAEXO performances, paving thus the way for the next challenging milestone, such as the optimization of the human joint torques via adaptive exoskeleton control.
Fritzsche, Lars; Gärtner, Christian; Spitzhirn, Michael; Galibarov, Pavel E; Damsgaard, Michael; Maurice, Pauline; Babič, Jan
Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results Proceedings Article
In: Black, Nancy L; Neumann, W Patrick; Noy, Ian (Ed.): Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), pp. 353–357, Springer International Publishing, Cham, 2022, ISBN: 978-3-030-74614-8.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction
@inproceedings{10.1007/978-3-030-74614-8_43,
title = {Assessing the Efficiency of Industrial Exoskeletons with Biomechanical Modelling -- Comparison of Experimental and Simulation Results},
author = {Lars Fritzsche and Christian G\"{a}rtner and Michael Spitzhirn and Pavel E Galibarov and Michael Damsgaard and Pauline Maurice and Jan Babi\v{c}},
editor = {Nancy L Black and W Patrick Neumann and Ian Noy},
isbn = {978-3-030-74614-8},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021)},
pages = {353--357},
publisher = {Springer International Publishing},
address = {Cham},
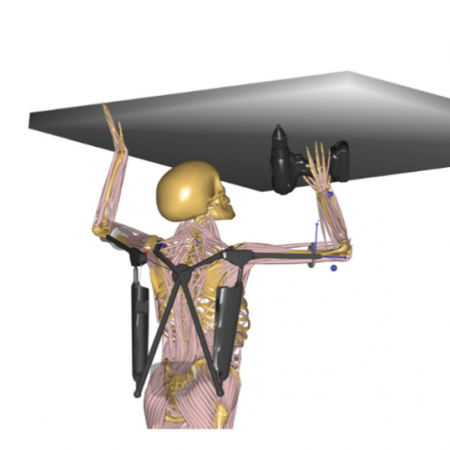
abstract = {Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
Exoskeletons are currently introduced for several industrial applications, but in many cases the efficiency of such devices in supporting heavy physical work has not been fully proved yet. Biomechanical simulation could considerably contribute to determining the efficiency of exoskeletons in various use cases with different user populations. In this paper we present an approach to extent laboratory and field studies by using the software AnyBody Modelling System. The biomechanical simulation is applied to the ``Paexo Shoulder'', a commercial exoskeleton provided by Ottobock. Results show that the exoskeleton substantially reduces muscle activation and joint reaction forces in the shoulder and does not increase activation or forces in the lumbar spine. Comparison with laboratory measurements show very similar results. This indicates that the simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons and thereby, supplements laboratory experiments and field tests during exoskeleton design and development.
2021
Kim, Wansoo; Peternel, Luka; Lorenzini, Marta; Babič, Jan; Ajoudani, Arash
A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools Journal Article
In: Robotics and Computer-Integrated Manufacturing, vol. 68, pp. 102084, 2021, ISSN: 07365845.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction | Links:
@article{Kim2021,
title = {A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools},
author = {Wansoo Kim and Luka Peternel and Marta Lorenzini and Jan Babi\v{c} and Arash Ajoudani},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0736584520302945},
doi = {10.1016/j.rcim.2020.102084},
issn = {07365845},
year = {2021},
date = {2021-04-01},
journal = {Robotics and Computer-Integrated Manufacturing},
volume = {68},
pages = {102084},
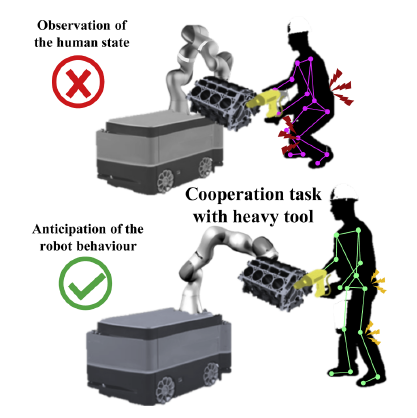
abstract = {In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.},
keywords = {Ergonomy, Human Performance Augmentation, Human-in-the-Loop Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this work, we present a novel control approach to human-robot collaboration that takes into account ergonomic aspects of the human co-worker during power tool operations. The method is primarily based on estimating and reducing the overloading torques in the human joints that are induced by the manipulated external load. The human overloading joint torques are estimated and monitored using a whole-body dynamic state model. The appropriate robot motion that brings the human into the suitable ergonomic working configuration is obtained by an optimisation method that minimises the overloading joint torques. The proposed optimisation process includes several constraints, such as the human arm muscular manipulability and safety of the collaborative task, to achieve a task-relevant optimised configuration. We validated the proposed method by a user study that involved a human-robot collaboration task, where the subjects operated a polishing machine on a part that was brought to them by the collaborative robot. A statistical analysis of ten subjects as an experimental evaluation of the proposed control framework is provided to demonstrate the potential of the proposed control framework in enabling ergonomic and task-optimised human-robot collaboration.
Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
Human pressure tolerance and effects of different padding materials with implications for development of exoskeletons and similar devices Journal Article
In: Applied Ergonomics, vol. 93, 2021, ISSN: 18729126.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Kozinc2021,
title = {Human pressure tolerance and effects of different padding materials with implications for development of exoskeletons and similar devices},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.1016/j.apergo.2021.103379},
issn = {18729126},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Applied Ergonomics},
volume = {93},
abstract = {In this study, we assessed pressure tolerance in 16 healthy participants at the thigh, chest, and pelvic area, using different surfaces (1 cm2, 20 cm2 and different components, used in exoskeleton design), and the effects of different padding materials. Our results showed substantial variability in pressure tolerance among the participants, as well as lower pressure tolerance in females. Regarding the force applied with the exoskeleton components, male participants had higher discomfort threshold (230.3 ± 44.9 N compared to females (116.1 ± 24.6 N) in the chest area. For the applications with 20 cm2 surface, the males also showed higher pain threshold at the thigh (89.3 ± 41.8 N vs. 34.6 ± 27.2 N) and the pelvis (97.6 ± 37.0 N vs. 56.1 ± 29.5 N). All padding materials increased pressure tolerance for 10\textendash38% (p \< 0.001), but little differences between materials were observed.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
In this study, we assessed pressure tolerance in 16 healthy participants at the thigh, chest, and pelvic area, using different surfaces (1 cm2, 20 cm2 and different components, used in exoskeleton design), and the effects of different padding materials. Our results showed substantial variability in pressure tolerance among the participants, as well as lower pressure tolerance in females. Regarding the force applied with the exoskeleton components, male participants had higher discomfort threshold (230.3 ± 44.9 N compared to females (116.1 ± 24.6 N) in the chest area. For the applications with 20 cm2 surface, the males also showed higher pain threshold at the thigh (89.3 ± 41.8 N vs. 34.6 ± 27.2 N) and the pelvis (97.6 ± 37.0 N vs. 56.1 ± 29.5 N). All padding materials increased pressure tolerance for 10–38% (p < 0.001), but little differences between materials were observed.

Fonda, Borut; Babič, Jan; Šarabon, Nejc
The medial‐lateral pedal force component correlates with q‐angle during steady‐state cycling at different workloads and cadences Journal Article
In: Applied Sciences (Switzerland), vol. 11, no. 3, pp. 1–8, 2021, ISSN: 20763417.
Abstract | BibTeX | Tags: Ergonomy, Human Performance Augmentation, Sport | Links:
@article{Fonda2021,
title = {The medial‐lateral pedal force component correlates with q‐angle during steady‐state cycling at different workloads and cadences},
author = {Borut Fonda and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/app11031004},
issn = {20763417},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Applied Sciences (Switzerland)},
volume = {11},
number = {3},
pages = {1--8},
abstract = {Leg movement during cycling is constrained to the pedal/crank path and predominantly occurs in a sagittal plane. Medial‐lateral force (FML) applied to the pedals is considered as a waste and does not contribute to the pedaling. The aim of this study was to examine the changes in FML across different cadences and workloads, and to examine the correlation with lateral knee movement (Q‐angle). Twenty‐two cyclists completed six trials at three workloads (2, 2.5 and 3 W/kg) and three cadences (75, 85, 95 rpm). Forces were recorded from the force pedal mounted to the left side. Absolute and normalized (to the peak total force) FML were compared across conditions and crosscorrelation with Q‐angle was calculated. Absolute FML was significantly different across cadences and workloads (p \< 0.05) with higher absolute FML at higher cadence. There was no significant difference in normalized FML across the three cadences. There was a significant decrease in normalized FML ($sim$10 N) at higher workloads. Statistically significant correlations were found between the FML and Q‐angle (R = 0.70\textendash0.77). The results demonstrate the link between the FML and Q‐ angle in healthy pain‐free cyclists during stationary cycling. It has also been observed that smaller normalized magnitude of the FML is present when the force effectiveness is increased.},
keywords = {Ergonomy, Human Performance Augmentation, Sport},
pubstate = {published},
tppubtype = {article}
}
Leg movement during cycling is constrained to the pedal/crank path and predominantly occurs in a sagittal plane. Medial‐lateral force (FML) applied to the pedals is considered as a waste and does not contribute to the pedaling. The aim of this study was to examine the changes in FML across different cadences and workloads, and to examine the correlation with lateral knee movement (Q‐angle). Twenty‐two cyclists completed six trials at three workloads (2, 2.5 and 3 W/kg) and three cadences (75, 85, 95 rpm). Forces were recorded from the force pedal mounted to the left side. Absolute and normalized (to the peak total force) FML were compared across conditions and crosscorrelation with Q‐angle was calculated. Absolute FML was significantly different across cadences and workloads (p < 0.05) with higher absolute FML at higher cadence. There was no significant difference in normalized FML across the three cadences. There was a significant decrease in normalized FML ($sim$10 N) at higher workloads. Statistically significant correlations were found between the FML and Q‐angle (R = 0.70–0.77). The results demonstrate the link between the FML and Q‐ angle in healthy pain‐free cyclists during stationary cycling. It has also been observed that smaller normalized magnitude of the FML is present when the force effectiveness is increased.

Kozinc, Žiga; Babič, Jan; Šarabon, Nejc
In: International Journal of Environmental Research and Public Health, vol. 18, no. 1, pp. 1–9, 2021, ISSN: 16604601.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Kozinc2021a,
title = {Comparison of subjective responses of low back pain patients and asymptomatic controls to use of spinal exoskeleton during simple load lifting tasks: A pilot study},
author = {\v{Z}iga Kozinc and Jan Babi\v{c} and Nejc \v{S}arabon},
doi = {10.3390/ijerph18010161},
issn = {16604601},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {International Journal of Environmental Research and Public Health},
volume = {18},
number = {1},
pages = {1--9},
abstract = {Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0\textendash10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
Spinal exoskeletons have been suggested as an approach for the prevention and rehabilitation of occupational low back pain (LBP). While the state-of-the-art exoskeletons were shown to substantially unload the back, user acceptance is still limited. Perceived discomfort and restriction of freedom of movement are commonly reported. In this pilot study, we explored the differences in subjective responses and user impressions to using passive spinal exoskeleton during a set of simple lifting tasks between LBP patients (n = 12) and asymptomatic individuals (n = 10). Visual analog scales (0–10) were used for all assessments. Overall, the results showed mostly similar responses or slightly more positive responses to the exoskeleton from LBP patients. Most notably, the LBP patients reported a statistically significant (p = 0.048) higher willingness to use the device daily (5.36 ± 4.05) compared to the control group (2.00 ± 1.85) and also gave the device a higher overall grade (6.58 ± 1.98 vs. 4.30 ± 2.26; p = 0.021). This study has demonstrated that individuals with current LBP responded more favorably to the use of the spinal exoskeleton for simple lifting tasks. This implies that current exoskeletons could be appropriate for LBP rehabilitation, but not preventions, as pain-free individuals are less willing to use such devices. Future studies should explore whether different exoskeleton designs could be more appropriate for people with no LBP issues.

Fritzsche, Lars; Galibarov, Pavel E.; Gartner, Christian; Bornmann, Jonas; Damsgaard, Michael; Wall, Rudolf; Schirrmeister, Benjamin; Gonzalez-Vargas, Jose; Pucci, Daniele; Maurice, Pauline; Ivaldi, Serena; Babič, Jan
Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System Journal Article
In: Wearable Technologies, vol. 2, 2021.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction | Links:
@article{Fritzsche2021,
title = {Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System},
author = {Lars Fritzsche and Pavel E. Galibarov and Christian Gartner and Jonas Bornmann and Michael Damsgaard and Rudolf Wall and Benjamin Schirrmeister and Jose Gonzalez-Vargas and Daniele Pucci and Pauline Maurice and Serena Ivaldi and Jan Babi\v{c}},
doi = {10.1017/wtc.2021.5},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {Wearable Technologies},
volume = {2},
abstract = {IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
IntroductionRecently, many industrial exoskeletons for supporting workers in heavy physical tasks have been developed. However, the efficiency of exoskeletons with regard to physical strain reduction has not been fully proved, yet. Several laboratory and field studies have been conducted, but still more data, that cannot be obtained solely by behavioral experiments, are needed to investigate effects on the human body.MethodsThis paper presents an approach to extend laboratory and field research with biomechanical simulations using the AnyBody Modeling System. Based on a dataset recorded in a laboratory experiment with 12 participants using the exoskeleton Paexo Shoulder in an overhead task, the same situation was reproduced in a virtual environment and analyzed with biomechanical simulation.ResultsSimulation results indicate that the exoskeleton substantially reduces muscle activity and joint reaction forces in relevant body areas. Deltoid muscle activity and glenohumeral joint forces in the shoulder were decreased between 54 and 87%. Simultanously, no increases of muscle activity and forces in other body areas were observed.DiscussionThis study demonstrates how a simulation framework could be used to evaluate changes in internal body loads as a result of wearing exoskeletons. Biomechanical simulation results widely agree with experimental measurements in the previous laboratory experiment and supplement such by providing an insight into effects on the human musculoskeletal system. They confirm that Paexo Shoulder is an effective device to reduce physical strain in overhead tasks. The framework can be extended with further parameters, allowing investigations for product design and evaluation.
2020
Koopman, Axel S; Naf, Matthias; Baltrusch, Saskia J; Kingma, Idsart; Rodriguez-Guerrero, Carlos; Babič, Jan; de Looze, Michiel P; van Dieen, Jaap H
Biomechanical evaluation of a new passive back support exoskeleton Journal Article
In: Journal of Biomechanics, vol. 105, pp. 109795, 2020, ISSN: 00219290.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@article{Koopman2020,
title = {Biomechanical evaluation of a new passive back support exoskeleton},
author = {Axel S Koopman and Matthias Naf and Saskia J Baltrusch and Idsart Kingma and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Michiel P de Looze and Jaap H van Dieen},
url = {https://linkinghub.elsevier.com/retrieve/pii/S0021929020302153},
doi = {10.1016/j.jbiomech.2020.109795},
issn = {00219290},
year = {2020},
date = {2020-05-01},
urldate = {2020-05-01},
journal = {Journal of Biomechanics},
volume = {105},
pages = {109795},
abstract = {The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13\textendash21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {article}
}
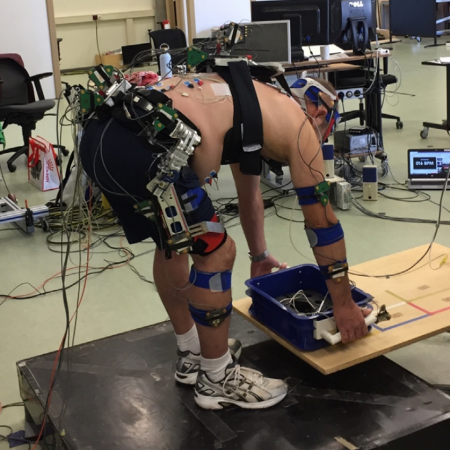
The number one cause of disability in the world is low-back pain, with mechanical loading as one of the major risk factors. To reduce mechanical loading, exoskeletons have been introduced in the workplace. Substantial reductions in back muscle activity were found when using the exoskeleton during static bending and manual materials handling. However, most exoskeletons only have one joint at hip level, resulting in loss of range of motion and shifting of the exoskeleton relative to the body. To address these issues, a new exoskeleton design has been developed and tested. The present study investigated the effect of the SPEXOR passive exoskeleton on compression forces, moments, muscle activity and kinematics during static bending at six hand heights and during lifting of a box of 10 kg from around ankle height using three techniques: Free, Squat and Stoop. For static bending, the exoskeleton reduced the compression force by 13–21 % depending on bending angle. Another effect of the exoskeleton was that participants substantially reduced lumbar flexion. While lifting, the exoskeleton reduced the peak compression force, on average, by 14 %. Lifting technique did not modify the effect of the exoskeleton such that the reduction in compression force was similar. In conclusion, substantial reductions in compression forces were found as a result of the support generated by the exoskeleton and changes in behavior when wearing the exoskeleton. For static bending, lumbar flexion was reduced with the exoskeleton, indicating reduced passive tissue strain. In addition, the reduced peak compression force could reduce the risk of compression induced tissue failure during lifting.

Baltrusch, Saskia J; van Dieen, Jaap H; Koopman, Axel S; Naf, Matthias; Rodriguez-Guerrero, Carlos; Babič, Jan; Houdijk, Han
SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting Journal Article
In: European Journal of Applied Physiology, vol. 120, no. 2, pp. 401–412, 2020, ISSN: 1439-6319.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Baltrusch2020,
title = {SPEXOR passive spinal exoskeleton decreases metabolic cost during symmetric repetitive lifting},
author = {Saskia J Baltrusch and Jaap H van Dieen and Axel S Koopman and Matthias Naf and Carlos Rodriguez-Guerrero and Jan Babi\v{c} and Han Houdijk},
url = {http://link.springer.com/10.1007/s00421-019-04284-6},
doi = {10.1007/s00421-019-04284-6},
issn = {1439-6319},
year = {2020},
date = {2020-02-01},
journal = {European Journal of Applied Physiology},
volume = {120},
number = {2},
pages = {401--412},
abstract = {Besides mechanical loading of the back, physiological strain is an important risk factor for low-back pain. Recently a passive exoskeleton (SPEXOR) has been developed to reduce loading on the low back. We aimed to assess the effect of this device on metabolic cost of repetitive lifting. To explain potential effects, we assessed kinematics, mechanical joint work, and back muscle activity. We recruited ten male employees, working in the luggage handling department of an airline company and having ample experience with lifting tasks at work. Metabolic cost, kinematics, mechanical joint work and muscle activity were measured during a 5-min repetitive lifting task. Participants had to lift and lower a box of 10 kg from ankle height with and without the exoskeleton. Metabolic cost was significantly reduced by 18 % when wearing the exoskeleton. Kinematics did not change significantly, while muscle activity decreased by up to 16 %. The exoskeleton took over 18\textendash25 % of joint work at the hip and L5S1 joints. However, due to large variation in individual responses, we did not find a significant reduction of joint work around the individual joints. Wearing the SPEXOR exoskeleton decreased metabolic cost and might, therefore, reduce fatigue development and contribute to prevention of low-back pain during repetitive lifting tasks. Reduced metabolic cost can be explained by the exoskeleton substituting part of muscle work at the hip and L5S1 joints and consequently decreasing required back muscle activity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Besides mechanical loading of the back, physiological strain is an important risk factor for low-back pain. Recently a passive exoskeleton (SPEXOR) has been developed to reduce loading on the low back. We aimed to assess the effect of this device on metabolic cost of repetitive lifting. To explain potential effects, we assessed kinematics, mechanical joint work, and back muscle activity. We recruited ten male employees, working in the luggage handling department of an airline company and having ample experience with lifting tasks at work. Metabolic cost, kinematics, mechanical joint work and muscle activity were measured during a 5-min repetitive lifting task. Participants had to lift and lower a box of 10 kg from ankle height with and without the exoskeleton. Metabolic cost was significantly reduced by 18 % when wearing the exoskeleton. Kinematics did not change significantly, while muscle activity decreased by up to 16 %. The exoskeleton took over 18–25 % of joint work at the hip and L5S1 joints. However, due to large variation in individual responses, we did not find a significant reduction of joint work around the individual joints. Wearing the SPEXOR exoskeleton decreased metabolic cost and might, therefore, reduce fatigue development and contribute to prevention of low-back pain during repetitive lifting tasks. Reduced metabolic cost can be explained by the exoskeleton substituting part of muscle work at the hip and L5S1 joints and consequently decreasing required back muscle activity.
Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Daniele; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work Journal Article
In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 1, pp. 152–164, 2020, ISSN: 1534-4320.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance | Links:
@article{Maurice2020b,
title = {Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Daniele Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/8856265/},
doi = {10.1109/TNSRE.2019.2945368},
issn = {1534-4320},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering},
volume = {28},
number = {1},
pages = {152--164},
address = {Nancy},
abstract = {Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.},
keywords = {Ergonomy, Exoskeleton Design and Control, Kinematics, Physical Human Robot Interaction, Postural Balance},
pubstate = {published},
tppubtype = {article}
}
Overhead work is a frequent cause of shoulder work-related musculoskeletal disorders. Exoskeletons offering arm support have the potential to reduce shoulder strain, without requiring large scale reorganization of the workspace. Assessment of such systems however requires to take multiple factors into consideration. This paper presents a thorough in-lab assessment of PAEXO, a novel passive exoskeleton for arm support during overhead work. A list of evaluation criteria and associated performance metrics is proposed to cover both objective and subjective effects of the exoskeleton, on the user and on the task being performed. These metrics are measured during a lab study, where 12 participants perform an overhead pointing task with and without the exoskeleton, while their physical, physiological and psychological states are monitored. Results show that using PAEXO reduces shoulder physical strain as well as global physiological strain, without increasing low back strain nor degrading balance. These positive effects are achieved without degrading task performance. Importantly, participants' opinions of PAEXO are positive, in agreement with the objective measures. Thus, PAEXO seems a promising solution to help prevent shoulder injuries and diseases among overhead workers, without negatively impacting productivity.
2019

Maurice, Pauline; Čamernik, Jernej; Gorjan, Daša; Schirrmeister, Benjamin; Bornmann, Jonas; Tagliapietra, Luca; Latella, Claudia; Pucci, Danielle; Fritzsche, Lars; Ivaldi, Serena; Babič, Jan
Evaluation of PAEXO, a novel passive exoskeleton for overhead work Journal Article
In: Computer Methods in Biomechanics and Biomedical Engineering, vol. 22, no. sup1, pp. S448–S450, 2019, ISSN: 1025-5842.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction | Links:
@article{Maurice2019a,
title = {Evaluation of PAEXO, a novel passive exoskeleton for overhead work},
author = {Pauline Maurice and Jernej \v{C}amernik and Da\v{s}a Gorjan and Benjamin Schirrmeister and Jonas Bornmann and Luca Tagliapietra and Claudia Latella and Danielle Pucci and Lars Fritzsche and Serena Ivaldi and Jan Babi\v{c}},
url = {https://doi.org/10.1080/10255842.2020.1714977 https://www.tandfonline.com/doi/full/10.1080/10255842.2020.1714977},
doi = {10.1080/10255842.2020.1714977},
issn = {1025-5842},
year = {2019},
date = {2019-10-01},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
volume = {22},
number = {sup1},
pages = {S448--S450},
publisher = {Taylor \& Francis},
abstract = {Assessment of physical, physiological, and psycho-logical aspects in the lab study suggest that PAEXO is a promising solution to reduce shoulder WMSDs among overhead workers. An inverse dynamics ana- lysis is being conducted to estimate joint torques from whole-body kinematics and ground reaction force to complement the present assessment. Data collected during field-testing with industrial workers are currently analyzed to evaluate the impact of PAEXO on real end-users.},
keywords = {Ergonomy, Exoskeleton Design and Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
Assessment of physical, physiological, and psycho-logical aspects in the lab study suggest that PAEXO is a promising solution to reduce shoulder WMSDs among overhead workers. An inverse dynamics ana- lysis is being conducted to estimate joint torques from whole-body kinematics and ground reaction force to complement the present assessment. Data collected during field-testing with industrial workers are currently analyzed to evaluate the impact of PAEXO on real end-users.

Šarabon, Nejc; Kozinc, Žiga; Babič, Jan; Marković, Goran
Effect of rowing ergometer compliance on biomechanical and physiological indicators during simulated 2,000-metre race Journal Article
In: Journal of Sports Science and Medicine, vol. 18, pp. 264–270, 2019.
Abstract | BibTeX | Tags: Ergonomy, Neuromusculoskeletal Modelling, Sport
@article{Sarabon2019,
title = {Effect of rowing ergometer compliance on biomechanical and physiological indicators during simulated 2,000-metre race},
author = {Nejc \v{S}arabon and \v{Z}iga Kozinc and Jan Babi\v{c} and Goran Markovi\'{c}},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
journal = {Journal of Sports Science and Medicine},
volume = {18},
pages = {264--270},
abstract = {This study compared biomechanical characteristics and physiological responses during rowing on three devices: (i) stable ergometer (STE), (ii) transversally compliant ergometer (TCE) and (iii) frontally compliant ergometer (FCE). Eleven young competitive rowers completed a 2000 meter simulated race under each of the ergometer conditions in a randomized order. Stroke rate, average force, power output, velocity and amplitude of the handle and stretcher or seat, heart rate and blood lactate were measured at 500 m intervals. Force and power at the stretcher were significantly lower (p \< 0.03) for TCE, while stroke rate and velocities of the handle and the seat were higher (p \< 0.01). No significant differences were observed between STE and FCE in biomechanical parameters. The lowest rowing performance was observed in FCE (p = 0.007), and was accompanied with the highest average heart rate (p = 0.031). Our findings indicate that in TCE, rowers modified their technique, but were able to maintain physiological strain and performance. In contrast, FCE had no effect on rowing biomechanics, but decreased rowing performance and increased physiological strain. It seems plausible that transversal, but not frontal compliance, elicited a biomechanical technique that might reduce the discrepancy between a rowing ergometer and on-water rowing.},
keywords = {Ergonomy, Neuromusculoskeletal Modelling, Sport},
pubstate = {published},
tppubtype = {article}
}
This study compared biomechanical characteristics and physiological responses during rowing on three devices: (i) stable ergometer (STE), (ii) transversally compliant ergometer (TCE) and (iii) frontally compliant ergometer (FCE). Eleven young competitive rowers completed a 2000 meter simulated race under each of the ergometer conditions in a randomized order. Stroke rate, average force, power output, velocity and amplitude of the handle and stretcher or seat, heart rate and blood lactate were measured at 500 m intervals. Force and power at the stretcher were significantly lower (p < 0.03) for TCE, while stroke rate and velocities of the handle and the seat were higher (p < 0.01). No significant differences were observed between STE and FCE in biomechanical parameters. The lowest rowing performance was observed in FCE (p = 0.007), and was accompanied with the highest average heart rate (p = 0.031). Our findings indicate that in TCE, rowers modified their technique, but were able to maintain physiological strain and performance. In contrast, FCE had no effect on rowing biomechanics, but decreased rowing performance and increased physiological strain. It seems plausible that transversal, but not frontal compliance, elicited a biomechanical technique that might reduce the discrepancy between a rowing ergometer and on-water rowing.
2017
Peternel, Luka; Kim, Wansoo; Babič, Jan; Ajoudani, Arash
Towards ergonomic control of human-robot co-manipulation and handover Proceedings Article
In: 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), pp. 55–60, IEEE, Birmingham, 2017, ISBN: 978-1-5386-4678-6.
Abstract | BibTeX | Tags: Ergonomy, Physical Human Robot Interaction | Links:
@inproceedings{Peternel2017a,
title = {Towards ergonomic control of human-robot co-manipulation and handover},
author = {Luka Peternel and Wansoo Kim and Jan Babi\v{c} and Arash Ajoudani},
url = {http://ieeexplore.ieee.org/document/8239537/},
doi = {10.1109/HUMANOIDS.2017.8239537},
isbn = {978-1-5386-4678-6},
year = {2017},
date = {2017-01-01},
booktitle = {2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids)},
pages = {55--60},
publisher = {IEEE},
address = {Birmingham},
abstract = {In this paper, we propose a novel method for the control of human-robot co-manipulation that takes into account the ergonomic requirements for the human co-worker. The robot uses a whole-body dynamic model of the human to optimise for the position of the co-manipulation task in the workspace. In this configuration, the overloading joint torques, i.e. the effects of an external load in human body joints, are minimised. In addition, the optimisation process includes several constraints, such as human arm manipulability properties, to ensure that the human has a good manipulation capacity in the given configuration. The main advantage of this approach is that the robot can potentially help to reduce the work-related strain and increase the productivity of the human co-worker. In addition, the on-line estimation of the overloading joint torques does not require an external force plate or sensor insoles. We validated the proposed method with experiments in two co-manipulation tasks: human using a device to polish an object that is delivered by the robot and a human-robot object handover. The results show that the proposed method is successful in achieving the ergonomic conditions for the human during},
keywords = {Ergonomy, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {inproceedings}
}
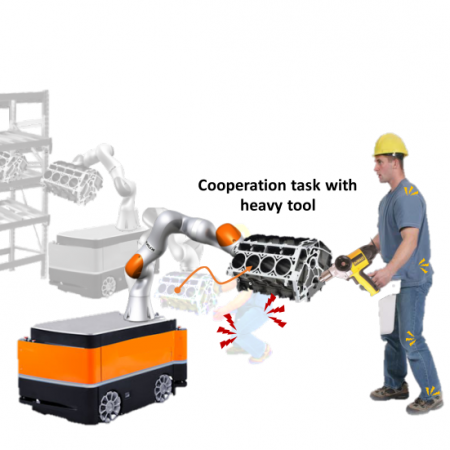
In this paper, we propose a novel method for the control of human-robot co-manipulation that takes into account the ergonomic requirements for the human co-worker. The robot uses a whole-body dynamic model of the human to optimise for the position of the co-manipulation task in the workspace. In this configuration, the overloading joint torques, i.e. the effects of an external load in human body joints, are minimised. In addition, the optimisation process includes several constraints, such as human arm manipulability properties, to ensure that the human has a good manipulation capacity in the given configuration. The main advantage of this approach is that the robot can potentially help to reduce the work-related strain and increase the productivity of the human co-worker. In addition, the on-line estimation of the overloading joint torques does not require an external force plate or sensor insoles. We validated the proposed method with experiments in two co-manipulation tasks: human using a device to polish an object that is delivered by the robot and a human-robot object handover. The results show that the proposed method is successful in achieving the ergonomic conditions for the human during

Rijcke, Laura De; Näf, Matthias; Rodriguez-Guerrero, Carlos; Graimann, Bernhard; Houdijk, Han; van Dieën, Jaap; Mombaur, Katja; Russold, Michael; Sarabon, Nejc; Babič, Jan; Lefeber, Dirk
SPEXOR: Towards a Passive Spinal Exoskeleton Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, vol. 16, pp. 325–329, Springer International Publishing, 2017, ISBN: 978-3-319-46531-9.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{DeRijcke2017,
title = {SPEXOR: Towards a Passive Spinal Exoskeleton},
author = {Laura {De Rijcke} and Matthias N\"{a}f and Carlos Rodriguez-Guerrero and Bernhard Graimann and Han Houdijk and Jaap van Die\"{e}n and Katja Mombaur and Michael Russold and Nejc Sarabon and Jan Babi\v{c} and Dirk Lefeber},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_53},
doi = {10.1007/978-3-319-46532-6_53},
isbn = {978-3-319-46531-9},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
volume = {16},
pages = {325--329},
publisher = {Springer International Publishing},
abstract = {Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In this part of the SPEXOR project we will fill this gap and design a novel, passive spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In this part of the SPEXOR project we will fill this gap and design a novel, passive spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.
Babič, Jan; Mombaur, Katja; Lefeber, Dirk; van Dieën, Jaap; Graimann, Bernhard; Russold, Michael; Šarabon, Nejc; Houdijk, Han
SPEXOR: Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration Book Section
In: González-Vargas, José; Ibáñez, Jaime; Contreras-Vidal, Jose L; van der Kooij, Herman; Pons, José Luis (Ed.): Wearable Robotics: Challenges and Trends, pp. 311–315, Springer International Publishing, 2017.
Abstract | BibTeX | Tags: Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation | Links:
@incollection{Babic2017,
title = {SPEXOR: Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration},
author = {Jan Babi\v{c} and Katja Mombaur and Dirk Lefeber and Jaap van Die\"{e}n and Bernhard Graimann and Michael Russold and Nejc \v{S}arabon and Han Houdijk},
editor = {Jos\'{e} Gonz\'{a}lez-Vargas and Jaime Ib\'{a}\~{n}ez and Jose L Contreras-Vidal and Herman van der Kooij and Jos\'{e} Luis Pons},
url = {http://link.springer.com/10.1007/978-3-319-46532-6_51},
doi = {10.1007/978-3-319-46532-6_51},
year = {2017},
date = {2017-01-01},
booktitle = {Wearable Robotics: Challenges and Trends},
pages = {311--315},
publisher = {Springer International Publishing},
abstract = {Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In the SPEXOR project we will fill this gap and design a novel spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.},
keywords = {Ergonomy, Exoskeleton Design and Control, Human Performance Augmentation},
pubstate = {published},
tppubtype = {incollection}
}
Most assistive robotic devices are exoskeletons which assist or augment the motion of the limbs and neglect the role of the spinal column in transferring load from the upper body and arms to the legs. In the SPEXOR project we will fill this gap and design a novel spinal exoskeleton to prevent low-back pain in able bodied workers and to support workers with low-back pain in vocational rehabilitation.
2016
Čamernik, Jernej; Potočanac, Zrinka; Peternel, Luka; Babič, Jan
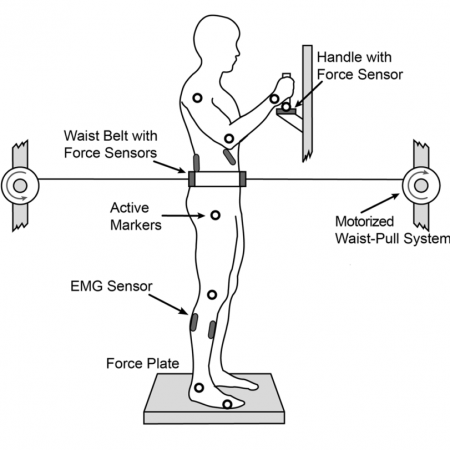
Holding a Handle for Balance during Continuous Postural Perturbations—Immediate and Transitionary Effects on Whole Body Posture Journal Article
In: Frontiers in Human Neuroscience, vol. 10, pp. 486, 2016, ISSN: 1662-5161.
Abstract | BibTeX | Tags: Ergonomy, Postural Balance, Sensorimotor Learning | Links:
@article{Camernik2016,
title = {Holding a Handle for Balance during Continuous Postural Perturbations\textemdashImmediate and Transitionary Effects on Whole Body Posture},
author = {Jernej \v{C}amernik and Zrinka Poto\v{c}anac and Luka Peternel and Jan Babi\v{c}},
url = {http://journal.frontiersin.org/article/10.3389/fnhum.2016.00486},
doi = {10.3389/fnhum.2016.00486},
issn = {1662-5161},
year = {2016},
date = {2016-01-01},
journal = {Frontiers in Human Neuroscience},
volume = {10},
pages = {486},
publisher = {Frontiers},
abstract = {When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.},
keywords = {Ergonomy, Postural Balance, Sensorimotor Learning},
pubstate = {published},
tppubtype = {article}
}
When balance is exposed to perturbations, hand contacts are often used to assist postural control. We investigated the immediate and the transitionary effects of supportive hand contacts during continuous anteroposterior perturbations of stance by automated waist-pulls. Ten young adults were perturbed for 5 min and required to maintain balance by holding to a stationary, shoulder-high handle and following its removal. Center of pressure (COP) displacement, hip, knee and ankle angles, leg and trunk muscle activity and handle contact forces were acquired. The analysis of results show that COP excursions are significantly smaller when the subjects utilize supportive hand contact and that the displacement of COP is strongly correlated to the perturbation force and significantly larger in the anterior than posterior direction. Regression analysis of hand forces revealed that subjects utilized the hand support significantly more during the posterior than anterior perturbations. Moreover, kinematical analysis showed that utilization of supportive hand contacts alter posture of the whole body and that postural readjustments after the release of the handle, occur at different time scales in the hip, knee and ankle joints. Overall, our findings show that supportive hand contacts are efficiently used for balance control during continuous postural perturbations and that utilization of a handle has significant immediate and transitionary effects on whole body posture.
2011

Babič, Jan
Utilization of human sensorimotor learning capacity for obtaining novel robot behaviours: 2-DOF ball balancing on a parallel platform Proceedings Article
In: 2011 IEEE International Conference on Robotics and Biomimetics, pp. 1778–1782, IEEE, Karon Beach, 2011, ISBN: 978-1-4577-2138-0.
Abstract | BibTeX | Tags: Ergonomy, Machine Learning, Sensorimotor Learning | Links:
@inproceedings{Babic2011a,
title = {Utilization of human sensorimotor learning capacity for obtaining novel robot behaviours: 2-DOF ball balancing on a parallel platform},
author = {Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/6181547/},
doi = {10.1109/ROBIO.2011.6181547},
isbn = {978-1-4577-2138-0},
year = {2011},
date = {2011-12-01},
booktitle = {2011 IEEE International Conference on Robotics and Biomimetics},
pages = {1778--1782},
publisher = {IEEE},
address = {Karon Beach},
abstract = {We propose a novel method for acquiring robot skill synthesis that exploits human capability to learn and to control complex tools and devices. The basic idea is to consider the target robotic system as a complex tool akin a computer mouse or a car that can be intuitively controlled by a human. Once the human learns how to control the robotic system effortlessly, the target behaviour can be obtained by the human on the robot through practice. The successful execution of the desired task by the human via the robot implies that the required control commands have been discovered by the human, and can subsequently be used for designing controller that operate autonomously. In this article, we demonstrate this idea by presenting a 2-DOF ball balancing task on a parallel platform obtained with the proposed method.},
keywords = {Ergonomy, Machine Learning, Sensorimotor Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
We propose a novel method for acquiring robot skill synthesis that exploits human capability to learn and to control complex tools and devices. The basic idea is to consider the target robotic system as a complex tool akin a computer mouse or a car that can be intuitively controlled by a human. Once the human learns how to control the robotic system effortlessly, the target behaviour can be obtained by the human on the robot through practice. The successful execution of the desired task by the human via the robot implies that the required control commands have been discovered by the human, and can subsequently be used for designing controller that operate autonomously. In this article, we demonstrate this idea by presenting a 2-DOF ball balancing task on a parallel platform obtained with the proposed method.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si