




2025
Poignant, Alexis; Morel, Guillaume; Jarrassé, Nathanaël
A Comparative Study Between a Virtual Wand and a One-to-One Approach for the Teleoperation of a Nearby Robotic Manipulator Proceedings Article
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 5608-5614, 2025.
Abstract | BibTeX | Tags: Human Motor Control, Teleoperation | Links:
@inproceedings{11127740,
title = {A Comparative Study Between a Virtual Wand and a One-to-One Approach for the Teleoperation of a Nearby Robotic Manipulator},
author = {Alexis Poignant and Guillaume Morel and Nathana\"{e}l Jarrass\'{e}},
doi = {10.1109/ICRA55743.2025.11127740},
year = {2025},
date = {2025-05-01},
urldate = {2025-05-01},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {5608-5614},
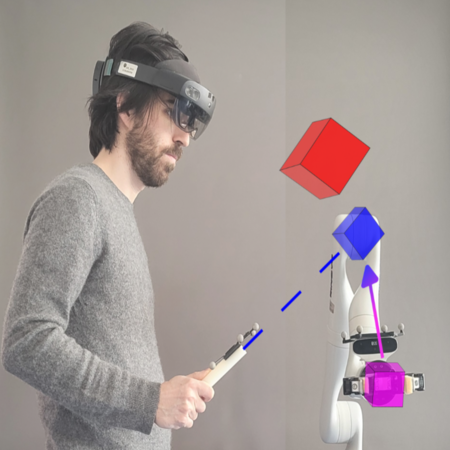
abstract = {The prevailing and most effective approach to teleoperate a robotic arm involves a direct position-to-position mapping, imposing robotic end-effector movements that mirrors those of the user, Fig. 1-top. However, due to this one-to-one mapping, the robot\'s motions are limited by the user\'s capability, particularly in translation. Drawing inspiration from head pointers utilized in the 1980s, originally designed to enable drawing with limited head motions for tetraplegic individuals, we proposed a “virtual wand” mapping which could be used by participants with reduced mobility. This mapping employs a virtual rigid linkage between the hand and the robot\'s endeffector, Fig. 1-bottom. With this approach, rotations produce amplified translations through a lever arm, creating a “rotation-to-position” coupling and expanding the translation workspace at the expense of a reduced rotation space. In this study, we compare the virtual wand approach to the one-to-one position mapping through the realization of 6-DoF reaching tasks. Results indicate that the two different mappings perform comparably well, are equally well-received by users, and exhibit similar motor control behaviors. Nevertheless, the virtual wand mapping is anticipated to outperform in tasks characterized by large translations and minimal effector rotations, whereas direct mapping is expected to demonstrate advantages in large rotations with minimal translations. These results pave the way for new interactions and interfaces, particularly in disability assistance utilizing residual body movements (instead of hands) as control input. Leveraging body parts with substantial rotations could enable the accomplishment of tasks previously deemed infeasible with standard direct coupling interfaces.},
keywords = {Human Motor Control, Teleoperation},
pubstate = {published},
tppubtype = {inproceedings}
}
The prevailing and most effective approach to teleoperate a robotic arm involves a direct position-to-position mapping, imposing robotic end-effector movements that mirrors those of the user, Fig. 1-top. However, due to this one-to-one mapping, the robot's motions are limited by the user's capability, particularly in translation. Drawing inspiration from head pointers utilized in the 1980s, originally designed to enable drawing with limited head motions for tetraplegic individuals, we proposed a “virtual wand” mapping which could be used by participants with reduced mobility. This mapping employs a virtual rigid linkage between the hand and the robot's endeffector, Fig. 1-bottom. With this approach, rotations produce amplified translations through a lever arm, creating a “rotation-to-position” coupling and expanding the translation workspace at the expense of a reduced rotation space. In this study, we compare the virtual wand approach to the one-to-one position mapping through the realization of 6-DoF reaching tasks. Results indicate that the two different mappings perform comparably well, are equally well-received by users, and exhibit similar motor control behaviors. Nevertheless, the virtual wand mapping is anticipated to outperform in tasks characterized by large translations and minimal effector rotations, whereas direct mapping is expected to demonstrate advantages in large rotations with minimal translations. These results pave the way for new interactions and interfaces, particularly in disability assistance utilizing residual body movements (instead of hands) as control input. Leveraging body parts with substantial rotations could enable the accomplishment of tasks previously deemed infeasible with standard direct coupling interfaces.
Poignant, Alexis; Jarrassé, Nathanaël; Morel, Guillaume
Teleoperating a 6 DoF Robotic Manipulator from Head Movements Proceedings Article
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 1-8, 2025.
Abstract | BibTeX | Tags: Human Motor Control, Teleoperation | Links:
@inproceedings{11127494,
title = {Teleoperating a 6 DoF Robotic Manipulator from Head Movements},
author = {Alexis Poignant and Nathana\"{e}l Jarrass\'{e} and Guillaume Morel},
doi = {10.1109/ICRA55743.2025.11127494},
year = {2025},
date = {2025-05-01},
urldate = {2025-05-01},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1-8},
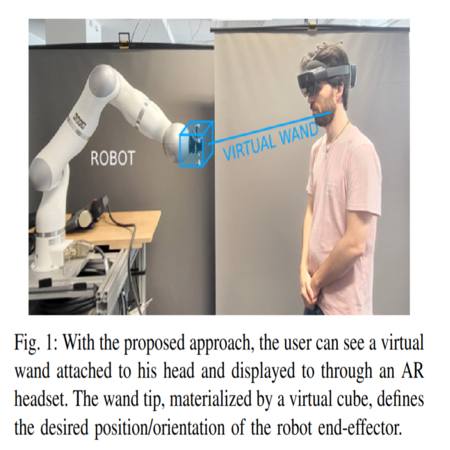
abstract = {This article presents an interactive control approach allowing a human user to teleoperate a robotic manipulator located nearby. With this approach, the user keeps his/her hands free, as only head movements are exploited to control the robot. The controller maps the 6 Degrees of Freedom (DoF) user\'s head position and orientation into the 6 DoF robot endeffector position and orientation. The robot can reach a large workspace thanks to the combination of two features. Firstly, a virtual wand between the user\'s head and the robot end-effector converts user\'s head pantilt rotations into large displacements of the robot end-effector center perpendicularly to the wand axis (2 DoF). Secondly, for the remaining 4 DoF (robot end-effector center displacement along the wand axis and robot en-effector orientation), realtime deformation of the virtual wand is triggered when the user reaches uncomfortable configurations due to his/her head workspace limitations. Additionally, the user gets, through an Augmented Reality (AR) Headset, a non-delayed visual feedback of the current virtual wand geometry and location. The paper includes a description of the setup and the proposed controller, detailing how the robot position/orientation is coupled to the user\'s head position/orientation. A set of elementary experiments with a constant-geometry wand is first presented, showing workspace limitations for some DoF. Then the wand reconfiguration is introduced in the experiments, leading to full control of 6 DoF manipulation tasks throughout a large workspace.},
keywords = {Human Motor Control, Teleoperation},
pubstate = {published},
tppubtype = {inproceedings}
}
This article presents an interactive control approach allowing a human user to teleoperate a robotic manipulator located nearby. With this approach, the user keeps his/her hands free, as only head movements are exploited to control the robot. The controller maps the 6 Degrees of Freedom (DoF) user's head position and orientation into the 6 DoF robot endeffector position and orientation. The robot can reach a large workspace thanks to the combination of two features. Firstly, a virtual wand between the user's head and the robot end-effector converts user's head pantilt rotations into large displacements of the robot end-effector center perpendicularly to the wand axis (2 DoF). Secondly, for the remaining 4 DoF (robot end-effector center displacement along the wand axis and robot en-effector orientation), realtime deformation of the virtual wand is triggered when the user reaches uncomfortable configurations due to his/her head workspace limitations. Additionally, the user gets, through an Augmented Reality (AR) Headset, a non-delayed visual feedback of the current virtual wand geometry and location. The paper includes a description of the setup and the proposed controller, detailing how the robot position/orientation is coupled to the user's head position/orientation. A set of elementary experiments with a constant-geometry wand is first presented, showing workspace limitations for some DoF. Then the wand reconfiguration is introduced in the experiments, leading to full control of 6 DoF manipulation tasks throughout a large workspace.
2024
Poignant, Alexis; Jarrassé, Nathanaël; Morel, Guillaume
Hands-Free Teleoperation of a Nearby Manipulator Through a Virtual Body-to-Robot Link Proceedings Article
In: 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), pp. 619-626, 2024, ISSN: 2155-1782.
Abstract | BibTeX | Tags: Human Motor Control, Teleoperation | Links:
@inproceedings{10719920,
title = {Hands-Free Teleoperation of a Nearby Manipulator Through a Virtual Body-to-Robot Link},
author = {Alexis Poignant and Nathana\"{e}l Jarrass\'{e} and Guillaume Morel},
doi = {10.1109/BioRob60516.2024.10719920},
issn = {2155-1782},
year = {2024},
date = {2024-09-01},
urldate = {2024-09-01},
booktitle = {2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob)},
pages = {619-626},
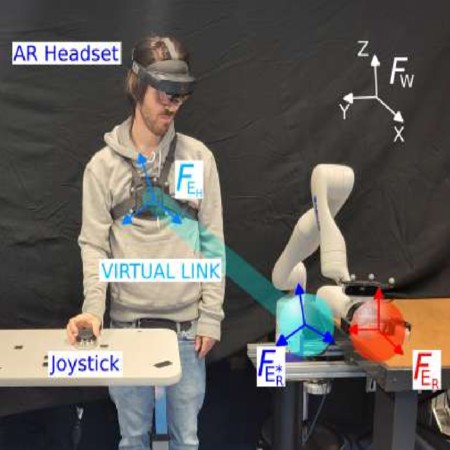
abstract = {This paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot\'s end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot\'s workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental cam-paign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based tele-operation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compro-mise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies.},
keywords = {Human Motor Control, Teleoperation},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot's end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot's workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental cam-paign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based tele-operation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compro-mise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si