




2021
Jamšek, Marko; Kunavar, Tjaša; Bobek, Urban; Rueckert, Elmar; Babič, Jan
Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4417–4424, 2021, ISSN: 2377-3766.
Abstract | BibTeX | Tags: Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction | Links:
@article{Jamsek2021,
title = {Predictive Exoskeleton Control for Arm-Motion Augmentation Based on Probabilistic Movement Primitives Combined With a Flow Controller},
author = {Marko Jam\v{s}ek and Tja\v{s}a Kunavar and Urban Bobek and Elmar Rueckert and Jan Babi\v{c}},
url = {https://ieeexplore.ieee.org/document/9387088/},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-07-01},
urldate = {2021-07-01},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {3},
pages = {4417--4424},
abstract = {There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.},
keywords = {Exoskeleton Design and Control, Force Control, Human Performance Augmentation, Optimal Control, Physical Human Robot Interaction},
pubstate = {published},
tppubtype = {article}
}
There are many work-related repetitive tasks where the application of exoskeletons could significantly reduce the physical effort by assisting the user in moving the arms towards the desired location in space. To make such controlmore user acceptable, the controller should be able to predict the motion of the user and act accordingly. This letter presents an exoskeleton control method that utilizes probabilistic movement primitives to generate predictions of user movements in real-time. These predictions are used in a flow controller, which represents a novel velocity-field-based exoskeleton control approach to provide assistance to the user in a predictive way. We evaluated our approach with a haptic robot, where a group of twelve participants had to perform movements towards different target locations in the frontal plane. We tested whether we could generalize the predictions for new and unknown target locations whilst providing assistance to the user without changing their kinematic parameters. The evaluation showed that we could accurately predict user movement intentions while at the same time significantly decrease the overall physical effort exerted by the participants to achieve the task.
2019
Romeo, Rocco A; Fiorio, Luca; Avila-Mireles, Edwin Johnatan; Cannella, Ferdinando; Metta, Giorgio; Pucci, Daniele
Closed-loop Force Control of a Pneumatic Gripper Actuated by Two Pressure Regulators Journal Article
In: IEEE International Conference on Intelligent Robots and Systems, pp. 7157-7162, 2019, ISSN: 21530866.
Abstract | BibTeX | Tags: Force Control | Links:
@article{Romeo2019,
title = {Closed-loop Force Control of a Pneumatic Gripper Actuated by Two Pressure Regulators},
author = {Rocco A Romeo and Luca Fiorio and Edwin Johnatan Avila-Mireles and Ferdinando Cannella and Giorgio Metta and Daniele Pucci},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=\&arnumber=8968226},
doi = {10.1109/IROS40897.2019.8968226},
issn = {21530866},
year = {2019},
date = {2019-01-01},
journal = {IEEE International Conference on Intelligent Robots and Systems},
pages = {7157-7162},
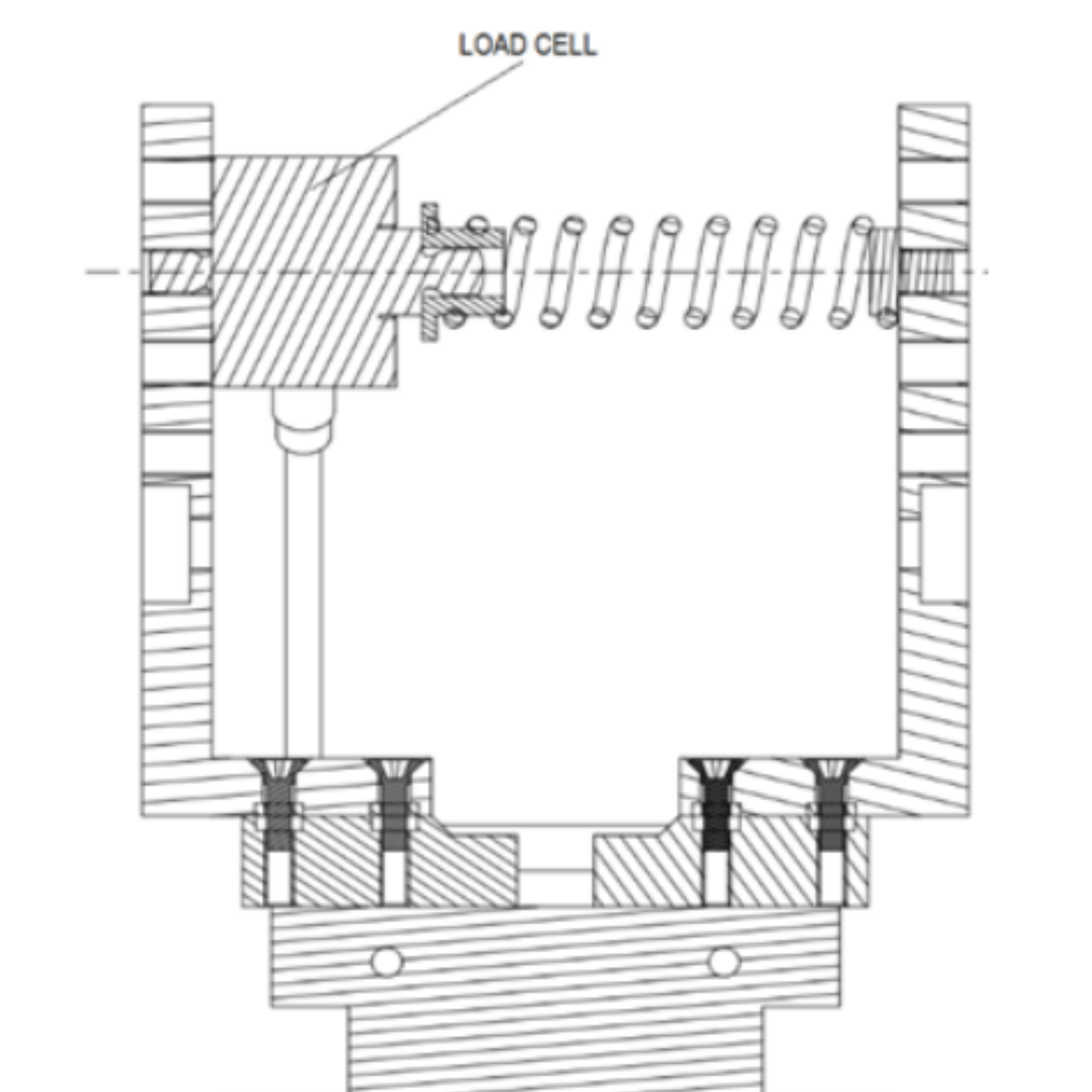
abstract = {Robotic arms can perform grasping actions thanks to their 'dexteorus' part, i.e. the gripper. Among the various categories, nowadays pneumatic grippers became the most employed in industry, as they have low cost and little bulkiness. Despite their simplicity, controlling the force applied by these grippers is not straightforward due to the dependence of such a force on the air pressure in the gripper chambers. As a result, it is still tricky to implement closed-loop force control for pneumatic grippers. This paper intends to deliver a control scheme relying on the force measurement to control pneumatic grippers. The force might be measured through a commercial sensor (e.g. a load cell) and fed back to close the control loop. This includes a calibration which maps the force-pressure relation taking into account both desired force and length of the gripper fingers. The control scheme exploits two different pressure regulators to precisely adjust the air pressure inside the gripper chambers (i.e. opening and closing chambers). To this aim, a quadratic programming algorithm is employed. The control scheme performance revealed to be good: results will be shown in terms of gripper response to sinusoidal and step inputs, along with the pressure-force characterization.},
keywords = {Force Control},
pubstate = {published},
tppubtype = {article}
}
Robotic arms can perform grasping actions thanks to their 'dexteorus' part, i.e. the gripper. Among the various categories, nowadays pneumatic grippers became the most employed in industry, as they have low cost and little bulkiness. Despite their simplicity, controlling the force applied by these grippers is not straightforward due to the dependence of such a force on the air pressure in the gripper chambers. As a result, it is still tricky to implement closed-loop force control for pneumatic grippers. This paper intends to deliver a control scheme relying on the force measurement to control pneumatic grippers. The force might be measured through a commercial sensor (e.g. a load cell) and fed back to close the control loop. This includes a calibration which maps the force-pressure relation taking into account both desired force and length of the gripper fingers. The control scheme exploits two different pressure regulators to precisely adjust the air pressure inside the gripper chambers (i.e. opening and closing chambers). To this aim, a quadratic programming algorithm is employed. The control scheme performance revealed to be good: results will be shown in terms of gripper response to sinusoidal and step inputs, along with the pressure-force characterization.
2018
Peternel, Luka; Petrič, Tadej; Babič, Jan
Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation Journal Article
In: Autonomous Robots, vol. 42, no. 1, pp. 1–17, 2018, ISSN: 0929-5593.
Abstract | BibTeX | Tags: Compliance and Impedance Control, Force Control, Human-in-the-Loop Control | Links:
@article{Peternel2018,
title = {Robotic assembly solution by human-in-the-loop teaching method based on real-time stiffness modulation},
author = {Luka Peternel and Tadej Petri\v{c} and Jan Babi\v{c}},
url = {http://link.springer.com/10.1007/s10514-017-9635-z},
doi = {10.1007/s10514-017-9635-z},
issn = {0929-5593},
year = {2018},
date = {2018-01-01},
journal = {Autonomous Robots},
volume = {42},
number = {1},
pages = {1--17},
publisher = {Springer US},
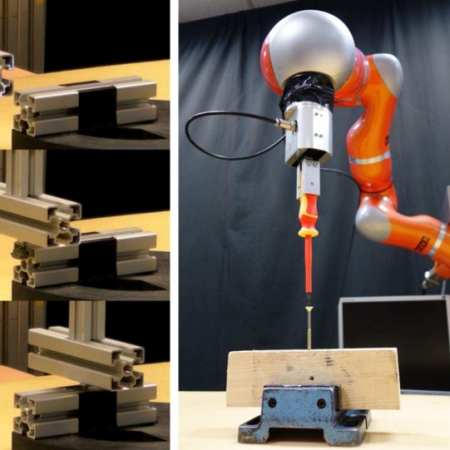
abstract = {We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.},
keywords = {Compliance and Impedance Control, Force Control, Human-in-the-Loop Control},
pubstate = {published},
tppubtype = {article}
}
We propose a novel human-in-the-loop approach for teaching robots how to solve assembly tasks in unpredictable and unstructured environments. In the proposed method the human sensorimotor system is integrated into the robot control loop though a teleoperation setup. The approach combines a 3-DoF end-effector force feedback with an interface for modulation of the robot end-effector stiffness. When operating in unpredictable and unstructured environments, modulation of limb impedance is essential in terms of successful task execution, stability and safety. We developed a novel hand-held stiffness control interface that is controlled by the motion of the human finger. A teaching approach was then used to achieve autonomous robot operation. In the experiments, we analysed and solved two part-assembly tasks: sliding a bolt fitting inside a groove and driving a self-tapping screw into a material of unknown properties. We experimentally compared the proposed method to complementary robot learning methods and analysed the potential benefits of direct stiffness modulation in the force-feedback teleoperation.
2016
Petrič, Tadej; Goljat, Rok; Babič, Jan
Augmentation of human arm motor control by isotropic force manipulability Proceedings Article
In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 696–701, IEEE, Daejeon, 2016, ISBN: 978-1-5090-3762-9.
Abstract | BibTeX | Tags: Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling | Links:
@inproceedings{Petric2016a,
title = {Augmentation of human arm motor control by isotropic force manipulability},
author = {Tadej Petri\v{c} and Rok Goljat and Jan Babi\v{c}},
url = {http://ieeexplore.ieee.org/document/7759128/},
doi = {10.1109/IROS.2016.7759128},
isbn = {978-1-5090-3762-9},
year = {2016},
date = {2016-10-01},
booktitle = {2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {696--701},
publisher = {IEEE},
address = {Daejeon},
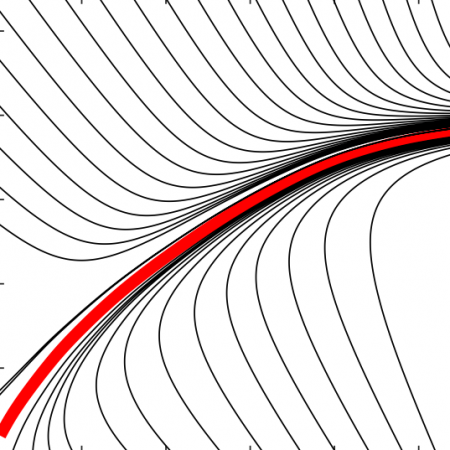
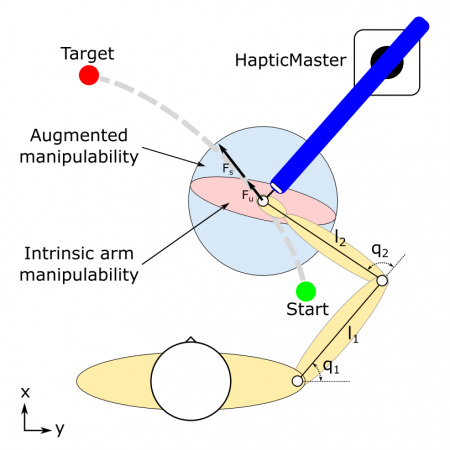
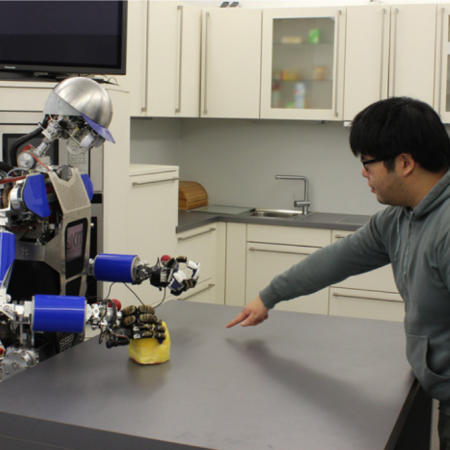
abstract = {In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.},
keywords = {Force Control, Human Performance Augmentation, Neuromusculoskeletal Modelling},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we propose a novel control approach for robots that are physically coupled with humans, such as exoskeletons and assisting devices. In contrast with the conventional controllers, where assistance is usually provided indifferently of the configuration of the arm and direction of the motion, we propose a control method that compensates the anisotropic property of the manipulability related to the human arm. Consequently, the assistive behaviour of the proposed method allows the user to perform tasks in arm configurations that are otherwise unsuitable due to the lack of manipulability. In effect, the proposed method transforms the elliptic shape of the force manipulability ellipse to a circular shape in the whole space of human arm configurations. The proposed approach was evaluated by the arm-reaching task that involved pushing of a heavy object on a plane. We tested the accuracy and efficiency of the proposed method under several conditions that involved motions with added weight and friction. The results of our study show that the proposed approach significantly improves the human motor control ability and maintains the desired accuracy of the movement.

Ivaldi, Serena; Babič, Jan; Mistry, Michael; Murphy, Robin
Special issue on whole-body control of contacts and dynamics for humanoid robots Journal Article
In: Autonomous Robots, vol. 40, no. 3, pp. 425–428, 2016, ISSN: 0929-5593.
BibTeX | Tags: Compliance and Impedance Control, Dynamic Motion, Force Control | Links:
@article{Ivaldi2016,
title = {Special issue on whole-body control of contacts and dynamics for humanoid robots},
author = {Serena Ivaldi and Jan Babi\v{c} and Michael Mistry and Robin Murphy},
url = {http://link.springer.com/10.1007/s10514-016-9545-5},
doi = {10.1007/s10514-016-9545-5},
issn = {0929-5593},
year = {2016},
date = {2016-03-01},
journal = {Autonomous Robots},
volume = {40},
number = {3},
pages = {425--428},
keywords = {Compliance and Impedance Control, Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
Gams, Andrej; Petrič, Tadej; Do, Martin; Nemec, Bojan; Morimoto, Jun; Asfour, Tamim; Ude, Aleš
Adaptation and coaching of periodic motion primitives through physical and visual interaction Journal Article
In: Robotics and Autonomous Systems, vol. 75, pp. 340–351, 2016, ISSN: 09218890.
Abstract | BibTeX | Tags: Dynamic Motion, Force Control | Links:
@article{Gams2016,
title = {Adaptation and coaching of periodic motion primitives through physical and visual interaction},
author = {Andrej Gams and Tadej Petri\v{c} and Martin Do and Bojan Nemec and Jun Morimoto and Tamim Asfour and Ale\v{s} Ude},
url = {http://linkinghub.elsevier.com/retrieve/pii/S0921889015001992},
doi = {10.1016/j.robot.2015.09.011},
issn = {09218890},
year = {2016},
date = {2016-01-01},
journal = {Robotics and Autonomous Systems},
volume = {75},
pages = {340--351},
publisher = {Elsevier B.V.},
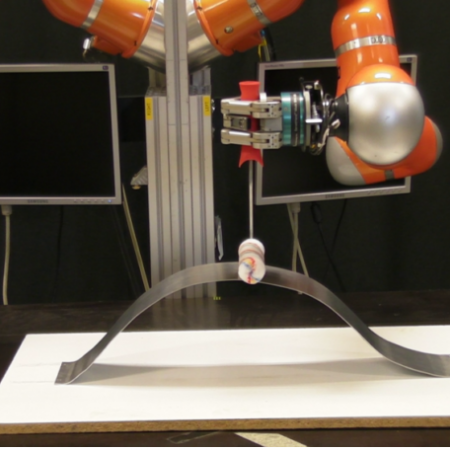
abstract = {In this paper we propose and evaluate a control system to (1) learn and (2) adapt robot motion for continuous non-rigid contact with the environment. We present the approach in the context of wiping surfaces with robots. Our approach is based on learning by demonstration. First an initial periodic motion, covering the essence of the wiping task, is transferred from a human to a robot. The system extracts and learns one period of motion. Once the user/demonstrator is content with the motion, the robot seeks and establishes contact with a given surface, maintaining a predefined force of contact through force feedback. The shape of the surface is encoded for the complete period of motion, but the robot can adapt to a different surface, perturbations or obstacles. The novelty stems from the fact that the feedforward component is learned and encoded in a dynamic movement primitive. By using the feedforward component, the feedback component is greatly reduced if not completely canceled. Finally, if the user is not satisfied with the periodic pattern, he/she can change parts of motion through predefined gestures or through physical contact in a manner of a tutor or a coach. The complete system thus allows not only a transfer of motion, but a transfer of motion with matching correspondences, i.e. wiping motion is constrained to maintain physical contact with the surface to be wiped. The interface for both learning and adaptation is simple and intuitive and allows for fast and reliable knowledge transfer to the robot. Simulated and real world results in the application domain of wiping a surface are presented on three different robotic platforms. Results of the three robotic platforms, namely a 7 degree-of-freedom Kuka LWR-4 robot, the ARMAR-IIIa humanoid platform and the Sarcos CB-i humanoid robot, depict different methods of adaptation to the environment and coaching.},
keywords = {Dynamic Motion, Force Control},
pubstate = {published},
tppubtype = {article}
}
In this paper we propose and evaluate a control system to (1) learn and (2) adapt robot motion for continuous non-rigid contact with the environment. We present the approach in the context of wiping surfaces with robots. Our approach is based on learning by demonstration. First an initial periodic motion, covering the essence of the wiping task, is transferred from a human to a robot. The system extracts and learns one period of motion. Once the user/demonstrator is content with the motion, the robot seeks and establishes contact with a given surface, maintaining a predefined force of contact through force feedback. The shape of the surface is encoded for the complete period of motion, but the robot can adapt to a different surface, perturbations or obstacles. The novelty stems from the fact that the feedforward component is learned and encoded in a dynamic movement primitive. By using the feedforward component, the feedback component is greatly reduced if not completely canceled. Finally, if the user is not satisfied with the periodic pattern, he/she can change parts of motion through predefined gestures or through physical contact in a manner of a tutor or a coach. The complete system thus allows not only a transfer of motion, but a transfer of motion with matching correspondences, i.e. wiping motion is constrained to maintain physical contact with the surface to be wiped. The interface for both learning and adaptation is simple and intuitive and allows for fast and reliable knowledge transfer to the robot. Simulated and real world results in the application domain of wiping a surface are presented on three different robotic platforms. Results of the three robotic platforms, namely a 7 degree-of-freedom Kuka LWR-4 robot, the ARMAR-IIIa humanoid platform and the Sarcos CB-i humanoid robot, depict different methods of adaptation to the environment and coaching.
2015
Nemec, Bojan; Petrič, Tadej; Ude, Aleš
Force adaptation with recursive regression Iterative Learning Controller Proceedings Article
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2835–2841, IEEE, Hamburg, 2015, ISBN: 978-1-4799-9994-1.
Abstract | BibTeX | Tags: Force Control, Machine Learning | Links:
@inproceedings{Nemec2015,
title = {Force adaptation with recursive regression Iterative Learning Controller},
author = {Bojan Nemec and Tadej Petri\v{c} and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/document/7353767/},
doi = {10.1109/IROS.2015.7353767},
isbn = {978-1-4799-9994-1},
year = {2015},
date = {2015-01-01},
booktitle = {2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {2835--2841},
publisher = {IEEE},
address = {Hamburg},
abstract = {In this paper we exploit Iterative Learning Controllers (ILC) schemes in force adaptation tasks. We propose to encode the control signal with Radial Basis Functions (RBF), which enhances the robustness of the ILC scheme and allows to vary the execution speed of the learned motion. For that a novel control scheme is proposed, which updates the feedforward compensation signals based on current iteration cycle signals in contrast to the standard ILC, which uses signals from the previous iteration cycle. This reduces the computational burden and enhances the adaptation speed. Stability of the proposed control law is analysed and discussed. The proposed approach is evaluated in simulation and on a Kuka Light Weight Robot Arm where the task was to perform force-based surface following with both discrete and periodic movements.},
keywords = {Force Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper we exploit Iterative Learning Controllers (ILC) schemes in force adaptation tasks. We propose to encode the control signal with Radial Basis Functions (RBF), which enhances the robustness of the ILC scheme and allows to vary the execution speed of the learned motion. For that a novel control scheme is proposed, which updates the feedforward compensation signals based on current iteration cycle signals in contrast to the standard ILC, which uses signals from the previous iteration cycle. This reduces the computational burden and enhances the adaptation speed. Stability of the proposed control law is analysed and discussed. The proposed approach is evaluated in simulation and on a Kuka Light Weight Robot Arm where the task was to perform force-based surface following with both discrete and periodic movements.
2014
Gams, Andrej; Petrič, Tadej; Nemec, Bojan; Ude, Aleš
Learning and adaptation of periodic motion primitives based on force feedback and human coaching interaction Proceedings Article
In: 2014 IEEE-RAS International Conference on Humanoid Robots, pp. 166–171, IEEE, Madrid, 2014, ISBN: 978-1-4799-7174-9.
Abstract | BibTeX | Tags: Force Control, Human-in-the-Loop Control, Machine Learning | Links:
@inproceedings{Gams2014,
title = {Learning and adaptation of periodic motion primitives based on force feedback and human coaching interaction},
author = {Andrej Gams and Tadej Petri\v{c} and Bojan Nemec and Ale\v{s} Ude},
url = {http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=7041354},
doi = {10.1109/HUMANOIDS.2014.7041354},
isbn = {978-1-4799-7174-9},
year = {2014},
date = {2014-01-01},
booktitle = {2014 IEEE-RAS International Conference on Humanoid Robots},
pages = {166--171},
publisher = {IEEE},
address = {Madrid},
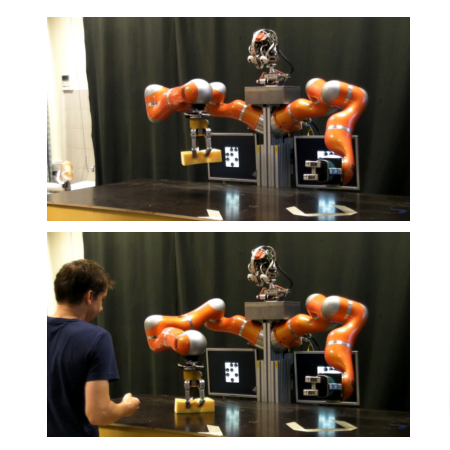
abstract = {Dynamic movement primitives (DMP) allow efficient learning and control of complex robot behaviors for both periodic and discrete point-to-point movements either in joint or Cartesian space. They also allow efficient modulation by changing of parameters. In this paper we introduce and evaluate the means of adapting periodic DMP trajectories with respect to force feedback. We simultaneously consider two aspects: 1) adaptation of whole trajectories to comply with the constraints set by the environment; and 2) partially modifying the trajectories during the execution based on human intervention to improve the task performance. The latter can either be force-based, i. e. through physical contact, or through predefined gestures. By intervening when necessary the human acts as a tutor, instructing the robot how to modify the trajectory and bypassing the need to learn new trajectories by autonomous exploration. We introduce the approach in the context of wiping a surface, where the robot first has to acquire and maintain contact, and where later the human tutor modifies the originally learned trajectory in order to achieve the desired robot behavior. We present simulation and real world results of wiping a surface with a Kuka 7 degree-of-freedom LWR robot.},
keywords = {Force Control, Human-in-the-Loop Control, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Dynamic movement primitives (DMP) allow efficient learning and control of complex robot behaviors for both periodic and discrete point-to-point movements either in joint or Cartesian space. They also allow efficient modulation by changing of parameters. In this paper we introduce and evaluate the means of adapting periodic DMP trajectories with respect to force feedback. We simultaneously consider two aspects: 1) adaptation of whole trajectories to comply with the constraints set by the environment; and 2) partially modifying the trajectories during the execution based on human intervention to improve the task performance. The latter can either be force-based, i. e. through physical contact, or through predefined gestures. By intervening when necessary the human acts as a tutor, instructing the robot how to modify the trajectory and bypassing the need to learn new trajectories by autonomous exploration. We introduce the approach in the context of wiping a surface, where the robot first has to acquire and maintain contact, and where later the human tutor modifies the originally learned trajectory in order to achieve the desired robot behavior. We present simulation and real world results of wiping a surface with a Kuka 7 degree-of-freedom LWR robot.
Pages
Network and support
Contact
Laboratory for Neuromechanics and Biorobotics
Jožef Stefan Institute
Jamova cesta 39, SI-1000 Ljubljana, Slovenia
+386 477 3638 | jan.babic@ijs.si | https://nbr.ijs.si